EP2439165B1 - Chariot de manutention doté d'un moyen de support de charges réglable en hauteur - Google Patents
Chariot de manutention doté d'un moyen de support de charges réglable en hauteur Download PDFInfo
- Publication number
- EP2439165B1 EP2439165B1 EP11007894A EP11007894A EP2439165B1 EP 2439165 B1 EP2439165 B1 EP 2439165B1 EP 11007894 A EP11007894 A EP 11007894A EP 11007894 A EP11007894 A EP 11007894A EP 2439165 B1 EP2439165 B1 EP 2439165B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- lifting height
- lifting
- bearing means
- load bearing
- height
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0755—Position control; Position detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F17/00—Safety devices, e.g. for limiting or indicating lifting force
- B66F17/003—Safety devices, e.g. for limiting or indicating lifting force for fork-lift trucks
Definitions
- the present invention relates to an industrial truck, in particular a reach truck, with a height-adjustable load supporting means, a lifting height control for the load supporting means, in which a plurality of predetermined lifting heights are stored for the load supporting means.
- the load bearing means is sometimes referred to as load handling equipment.
- the user directly controls the lifting or stacking process and receives information about the current lifting height of the load carrier via a display.
- a positioning aid for the load support means is offered, which flashes faster, for example, when approaching the selected stack level and, for example, automatically slows down the lifting or lowering of the load supporting means, so that the user can approach the preselected stack level exactly.
- the difference to the destination can also be displayed.
- the US 7,287,625 B1 describes an industrial truck with a sensor and a control system designed to prevent unsafe use of the fork below a threshold above the ground.
- the EP 1 604 942 A2 describes a device for supporting the stacking and unstacking in a forklift.
- This device comprises a height measuring device, a video camera, a control device for the operation of the fork, a screen connected to the control device, a control unit connected to the control unit for the Hubtownnvorines the fork, wherein the control unit on the Switches video menu and the signal of the video camera switches to the screen when the fork occurs in a close range with respect to the predetermined height of the fork.
- the invention has for its object to provide an industrial truck with a height-adjustable load supporting means, which supports in a simple manner an operator when starting a desired lifting height.
- the truck according to the invention has an adjustable load support means and a Hubtownn interviewedung for the load supporting means. In the Hubtownn interviewedung more predetermined lift heights for the load bearing means are stored.
- the predetermined lifting heights refer to the heights of the bearing or the storage areas in which the truck is to be used.
- the truck is equipped with a lift height detection for the load supporting means, which detects an actual value of the lift height of the load carrying means and displays for the lift height control.
- the truck according to the invention has an operating element that allows manual adjustment of the lifting heights of the load bearing means at different speeds.
- the lifting height control moves the load carrying means to one of the predetermined lifting heights, when the speed predetermined by the operating element for adjusting the load carrying means is below a predetermined threshold value.
- the lifting height control selects for the approaching lifting height from the plurality of predetermined lifting heights that lifting height which comes closest to the actual value of the lifting height in the direction of movement of the load-bearing means.
- the approach of the closest approach in the direction of travel height can also be referred to as a snap-in ".
- the Hub stoodn interviewedung differs in the approaching lifting height, whether the lifting height is approached for storage or outsourcing. If the lifting height control drives a lifting height for storing a load present on the load carrying means, then the lifting height is approached by a predetermined amount of height higher than during the removal. In one possible embodiment, an operating element for a manual selection for storage or retrieval is formed. In an alternative embodiment, the load bearing means may be configured with a load sensor indicating to the lift height controller whether or not there is a load on the load bearing means. In this case, the lifting height control when starting a lifting height with load approach the corresponding lifting height by the predetermined amount of height higher than when retrieving.
- the truck according to the invention is designed as a reach truck. In principle, however, it is possible to design any lifting truck that is suitable for approaching different lifting heights according to the invention.
- the lifting height is detected incrementally during the mast lift.
- the transition from the free lift to the mast lift serves as reference position for the incremental lifting height detection.
- the threshold value for the predetermined speed of the load bearing means 60%, preferably 80% of the predetermined speed by the operating element.
- the threshold be freely specified by a user of the truck. The threshold allows an operator to travel near the desired lift height at maximum speed and then reduce the speed of the load support before reaching the desired lift height and then automatically move the lift height control to the desired lift height.
- the lifting height control and / or the operating element are equipped with a display that indicates the reaching of the approached lifting height.
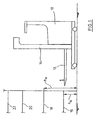
- Fig. 1 shows a schematic view of a reach truck 10 with a fork 12, which is adjustable along a lifting mast 14 in height.
- the mast 14 may be formed with two or three mast segments, which may also be extended to lift the load bearing means.
- the reach truck 10 is with its lifting height control (see. Fig. 2 ) arranged to approach the schematically illustrated stacking levels 16, 18, 20, 22 for storing and retrieving loads.
- the heights of the stack levels are in Fig. 1 shown only as an example.
- Each stack level is assigned a lifting height in the control, for example, the stack level 16, the lifting height h 16 and the stack level 18, the lifting height h 18 assigned.
- the lifting heights are set when commissioning the truck, for example, by a service technician and stored in the Hubtownn capitaung.
- the fork 12 When starting the shelf without load, the fork 12 is automatically moved in the manner to be described below to the corresponding lifting height by the Hubtownn interviewedung. Subsequently, a manual retraction of the fork 12 takes place in the shelf, whereby the fork is driven under the male load, so for example in the male pallet. This is followed by a manual lifting of the load without moving the fork, so that the pallet picked up no longer rests on the shelf. This is followed by a return of the fork 12, so that the pallet is removed from the shelf and can be transported after lowering the fork.
- a lifting height When approaching a lifting height with load, a lifting height is first approached which is approximately 150 mm higher than the lifting height approached during the removal.
- the forklift 12 is moved manually into the shelf together with the load thereon and, when the pallet is completely in the rack, manually set down, so that the pallet touches the shelf. After a further lowering of the fork 12, the fork comes free and can be pulled out of the rack and under the load again.
- the lifting height control according to the invention, only the start of the desired lifting height is automatic, the retraction of the fork 12 in the shelf and the free lifting or lowering of the fork 12 in the shelf is done manually or is supported by a separate assistance system.
- Fig. 2 shows a control element 24 for the Hub Whyn capitaung.
- the control element 24 has in its right area panels 26 that can be operated by the driver of the truck.
- the left area of the operating element 24 is equipped with display elements 28.
- the panels 30, 32, 34, 36 can be manually selected a storage area in which is currently being worked. Selecting one of the storage area panels will activate the stored lift heights for each storage area in the lift height control.
- the control panel 38 may be actuated to indicate that a deposit order is in progress.
- the control panel 40 may be selected to indicate that a swap job is in progress. In the event that the control panel 38 has been operated and the Hubtownn interviewedung is indicated that a storage order is present, the selected lifting height is approached by about 150 mm higher, so that the driver of the truck can settle the load manually on the shelf.
- the control element 24 activates the snap-in mode in the lifting height control.
- the lift control automatically starts the first shelf, which is present when the speed drops below a predetermined threshold.
- Fig. 1 This means that when the fork 12 has been moved, for example, over the height h 18 and the lifting height h 20 for the shelf 20 has not yet exceeded, that when the lifting speed of the fork is lowered, the lifting height control automatically the fork in the stroke height h 20 moves.
- the lift height control distinguishes whether a storage order or a removal order exists. In the case in which a storage order is present, the shelf 20 is approached by about 150 mm higher than when a removal order 40 is present.
- the user is shown through the display fields 44 and 46 whether there is a storage or removal order.
- the display 48 illuminates when the lift required for the job has been reached, d. h., When the target height is reached and can be stored or outsourced.
- the display 50 indicates to the user the direction to the target height, that is to be raised or lowered.
- the display 52 indicates to the user which of the storage areas has been selected.
- the display 54 indicates the absolute lifting height in mm.
- the display 56 indicates to the user the deviation from the desired lifting height in mm.
- the next rack height is automatically approached in accordance with the direction of movement of the fork. This means when lifting the fork, that the next higher stack level is approached and when lowering the fork, that the next lower level is approached. If the forklift is above the top stack level, the lift height control will automatically select and approach the top stack level as the desired lift height.
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Transportation (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Civil Engineering (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Control And Safety Of Cranes (AREA)
- Warehouses Or Storage Devices (AREA)
Claims (9)
- Chariot de manutention doté d'un moyen de support de charges (12) réglable en hauteur, d'une commande de hauteur de levage pour le moyen de support de charges (12) dans laquelle sont enregistrées plusieurs hauteurs de levage prédéfinies pour le moyen de support de charges (12), d'une détection de hauteur de levage pour le moyen de support de charges (12) qui détecte une valeur effective de la hauteur de levage du moyen de support de charges et la met à disposition de la commande de hauteur de levage, et d'un élément de manoeuvre (24) qui permet un réglage manuel de la hauteur de levage du moyen de support de charges à différentes vitesses,
caractérisé en ce que
la commande de hauteur de levage et l'élément de manoeuvre (24) sont constitués de sorte que le moyen de support de charges (12) peut être déplacé par la commande de hauteur de levage à une des hauteurs de levage prédéfinies si la vitesse de réglage du moyen de support de charges paramétrée par l'élément de manoeuvre (24) est passée sous une valeur de seuil prédéfinie, la hauteur de levage initiée par la commande de hauteur de levage correspondant à la hauteur de levage des hauteurs de levage prédéfinies qui se rapproche le plus de la valeur effective de la hauteur de levage dans la direction de mouvement du moyen de support de charges. - Chariot de manutention (10) selon la revendication 1, caractérisé en ce que la hauteur de levage initiée par la commande de hauteur de levage est, lors d'une opération de stockage, plus importante, selon une valeur de hauteur prédéfinie, que lors de l'opération de déstockage.
- Chariot de manutention (10) selon la revendication 2, caractérisé en ce que l'élément de manoeuvre (24) permet de sélectionner manuellement si, avec le moyen de support de charges (12), il doit être effectué une opération de stockage ou une opération déstockage.
- Chariot de manutention (10) selon la revendication 2 ou 3, caractérisé en ce qu'il est prévu un capteur de charge qui indique à la commande de hauteur de levage s'il y a ou non une charge sur le moyen de support de charges (12) et si la commande de hauteur de levage lors du démarrage avec la charge initie la hauteur de levage pour une opération de stockage.
- Chariot de manutention (10) selon une des revendications 1 à 4, caractérisé en ce que, en tant que chariot de manutention (10), il est prévu un chariot à mât rétractable (10).
- Chariot de manutention (10) selon la revendication 5, caractérisé en ce que la détection de la hauteur de levage lors d'un levage de mât détecte la hauteur de levage de façon incrémentielle.
- Chariot de manutention (10) selon une des revendications 1 à 6, caractérisé en ce que la valeur de seuil pour la vitesse paramétrée du moyen de support de charges est de 60 %, de préférence de 80 %, de la vitesse du moyen de support de charges paramétrée par l'élément de manoeuvre (24).
- Chariot de manutention (10) selon une des revendications 1 à 7, caractérisé en ce que la valeur de seuil de la vitesse paramétrée peut être réglée par un utilisateur.
- Chariot de manutention (10) selon une des revendications 1 à 8, caractérisé en ce que la commande de hauteur de levage et/ou l'élément de manoeuvre (24) présente un affichage qui indique que la hauteur de levage initiée a été atteinte.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102010048662A DE102010048662A1 (de) | 2010-10-07 | 2010-10-07 | Flurförderzeug mit einem höhenverstellbaren Lasttragmittel |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2439165A1 EP2439165A1 (fr) | 2012-04-11 |
| EP2439165B1 true EP2439165B1 (fr) | 2012-10-24 |
Family
ID=44759355
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP11007894A Active EP2439165B1 (fr) | 2010-10-07 | 2011-09-29 | Chariot de manutention doté d'un moyen de support de charges réglable en hauteur |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8521373B2 (fr) |
| EP (1) | EP2439165B1 (fr) |
| CN (1) | CN102530776B (fr) |
| DE (1) | DE102010048662A1 (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3072777A1 (fr) | 2015-03-27 | 2016-09-28 | Jungheinrich Aktiengesellschaft | Chariot de manutention, notamment transpalette |
| US10430073B2 (en) | 2015-07-17 | 2019-10-01 | Crown Equipment Corporation | Processing device having a graphical user interface for industrial vehicle |
| US10754466B2 (en) | 2016-11-22 | 2020-08-25 | Crown Equipment Corporation | User interface device for industrial vehicle |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010039471B4 (de) * | 2010-08-18 | 2014-02-13 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Bestimmung einer Hubhöhe einer Arbeitsmaschine |
| USD693834S1 (en) * | 2011-02-28 | 2013-11-19 | Hitachi Construction Machinery Co., Ltd. | Construction machine display with a graphic user interface |
| JP6101498B2 (ja) * | 2013-01-31 | 2017-03-22 | ヤンマー株式会社 | 作業車両 |
| DE102013113701A1 (de) * | 2013-09-17 | 2015-03-19 | Still Gmbh | Steuerungsverfahren für Hubhöhenvorwahl eines Flurförderzeugs |
| DE102013112016B4 (de) | 2013-10-31 | 2025-11-13 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einem Hubhöhenassistenzsystem |
| DE102014112898A1 (de) * | 2014-09-08 | 2016-03-10 | Still Gmbh | Flurförderzeug mit Assistenzfunktion |
| US9932213B2 (en) | 2014-09-15 | 2018-04-03 | Crown Equipment Corporation | Lift truck with optical load sensing structure |
| EP3023382B9 (fr) * | 2014-11-18 | 2018-05-16 | STILL GmbH | Procede de preselection de la hauteur de levage pour un chariot de manutention |
| SE542296C2 (en) | 2016-10-10 | 2020-04-07 | Aaloe Ab | Device for semi-automatic movement of objects |
| CN107176564A (zh) * | 2016-11-07 | 2017-09-19 | 林德(中国)叉车有限公司 | 一种叉车门架高度定位装置及方法 |
| US12077419B2 (en) | 2020-12-18 | 2024-09-03 | Industrial Technology Research Institute | Method and system for controlling a handling machine and non-volatile computer readable recording medium |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3818302A (en) * | 1970-01-06 | 1974-06-18 | M Rutledge | Control apparatus for a warehousing shelf locator |
| FR2130506B1 (fr) * | 1971-03-26 | 1976-08-06 | Irion & Vosseler | |
| DE2114617C2 (de) * | 1971-03-26 | 1976-04-29 | Albert Irion Nachfolger, 7000 Stuttgart | Steuergerät für Hublader mit an einem Hubmast auf- und abbeweglichem Lastschlitten |
| US4547844A (en) * | 1979-03-16 | 1985-10-15 | The Raymond Corporation | Shelf height selector |
| US4509127A (en) * | 1981-03-31 | 1985-04-02 | Kabushiki Kaisha Toyoda Jidoh Shokki Seisakusho | Control device for loading and unloading mechanism |
| DE3306463A1 (de) * | 1983-02-24 | 1984-09-06 | Jungheinrich Unternehmensverwaltung Kg, 2000 Hamburg | Flurfoerderzeug |
| US4598797A (en) * | 1984-04-13 | 1986-07-08 | Clark Equipment Company | Travel/lift inhibit control |
| DE3629089C3 (de) * | 1986-08-27 | 1996-04-25 | Jungheinrich Ag | Hubstapler, insbesondere industrieller Hubstapler, mit Hubmast |
| EP0796749B1 (fr) * | 1996-03-19 | 2001-10-17 | Kabushiki Kaisha Toyoda Jidoshokki Seisakusho | Véhicule utilitaire |
| DE19613386A1 (de) * | 1996-04-03 | 1997-10-09 | Fiat Om Carrelli Elevatori | Flurförderzeug, das wahlweise manuell oder automatisch betreibbar ausgebildet ist |
| JP2002167198A (ja) * | 2000-11-30 | 2002-06-11 | Shiyooshin:Kk | 高所作業台車 |
| US7287625B1 (en) * | 2004-02-19 | 2007-10-30 | Harris Brian L | Forklift safety sensor and control system |
| DE102004027446B4 (de) * | 2004-06-04 | 2007-08-23 | Jungheinrich Aktiengesellschaft | Vorrichtung zur Unterstützung des Ein- und Ausstapelns bei einem Stapler |
| US20060042804A1 (en) * | 2004-08-27 | 2006-03-02 | Caterpillar Inc. | Work implement rotation control system and method |
| US8230976B2 (en) * | 2008-04-16 | 2012-07-31 | The Raymond Corporation | Pallet truck with calculated fork carriage height |
| WO2009130528A1 (fr) * | 2008-04-21 | 2009-10-29 | Pramac S.P.A. | Chariot élévateur |
-
2010
- 2010-10-07 DE DE102010048662A patent/DE102010048662A1/de not_active Withdrawn
-
2011
- 2011-09-29 EP EP11007894A patent/EP2439165B1/fr active Active
- 2011-09-30 CN CN201110422148.0A patent/CN102530776B/zh active Active
- 2011-10-06 US US13/267,388 patent/US8521373B2/en active Active
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3072777A1 (fr) | 2015-03-27 | 2016-09-28 | Jungheinrich Aktiengesellschaft | Chariot de manutention, notamment transpalette |
| DE102015104745A1 (de) | 2015-03-27 | 2016-09-29 | Jungheinrich Aktiengesellschaft | Flurförderzeug, insbesondere Niederhubfahrzeug |
| US10430073B2 (en) | 2015-07-17 | 2019-10-01 | Crown Equipment Corporation | Processing device having a graphical user interface for industrial vehicle |
| US10949083B2 (en) | 2015-07-17 | 2021-03-16 | Crown Equipment Corporation | Processing device having a graphical user interface for industrial vehicle |
| US11899871B2 (en) | 2015-07-17 | 2024-02-13 | Crown Equipment Corporation | Processing device having a graphical user interface for industrial vehicle |
| US10754466B2 (en) | 2016-11-22 | 2020-08-25 | Crown Equipment Corporation | User interface device for industrial vehicle |
| US10936183B2 (en) | 2016-11-22 | 2021-03-02 | Crown Equipment Corporation | User interface device for industrial vehicle |
| US11054980B2 (en) | 2016-11-22 | 2021-07-06 | Crown Equipment Corporation | User interface device for industrial vehicle |
| US12405722B2 (en) | 2016-11-22 | 2025-09-02 | Crown Equipment Corporation | User interface device for industrial vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| US8521373B2 (en) | 2013-08-27 |
| US20120089305A1 (en) | 2012-04-12 |
| EP2439165A1 (fr) | 2012-04-11 |
| DE102010048662A1 (de) | 2012-04-12 |
| CN102530776B (zh) | 2016-08-17 |
| CN102530776A (zh) | 2012-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2439165B1 (fr) | Chariot de manutention doté d'un moyen de support de charges réglable en hauteur | |
| EP2653429B1 (fr) | Procédé de commande pour chariot de manutention et chariot de manutention | |
| EP2468678B1 (fr) | Chariot de manutention équipé d'un capteur pour détecter l'environnement spatial et procédé de fonctionnement d'un tel chariot de manutention | |
| EP2653430B1 (fr) | Procédé de commande pour l'enlèvement de la charge d'un chariot de manutention et chariot de manutention | |
| DE10305900C5 (de) | Stapler | |
| EP2518000B2 (fr) | Chariot de manutention pouvant fonctionner sans conducteur | |
| EP1604942B1 (fr) | Dispositif d'aide au chargement et au déchargement de charges pour un chariot élévateur | |
| EP3023382B9 (fr) | Procede de preselection de la hauteur de levage pour un chariot de manutention | |
| DE102011018520B4 (de) | Verfahren zum Anfahren eines Lagerplatzes mit einem Flurförderzeug | |
| EP3020677B1 (fr) | Procede de preselection de la hauteur de levage pour un chariot de manutention | |
| EP1468958B1 (fr) | Chariot élévateur pour rayonnages hauts à mode de fonctionnement semi-automatique | |
| DE102005043781A1 (de) | Flurförderzeug mit einem im Bereich eines Hubgerüsts angeordneten Umgebungssensor | |
| DE102006020491A1 (de) | Schmalgangstapler mit Anfahrmaß von 100 mm | |
| EP2993155B1 (fr) | Chariot de manutention ayant une fonction d'assistance | |
| DE102014113555B4 (de) | Verfahren zur Steuerung des Lastteils eines Flurförderzeugs | |
| DE102013112016B4 (de) | Flurförderzeug mit einem Hubhöhenassistenzsystem | |
| DE102015107260A1 (de) | Verfahren zur Hubhöhenvorwahl bei einem Flurförderzeug | |
| DE102014111751B4 (de) | Flurförderzeug | |
| DE202009003435U1 (de) | Stanzanlage mit Hubvorrichtung | |
| DE102014116049A1 (de) | Verfahren zur Steuerung einer Hubhöhenvorwahl bei einem Flurförderzeug | |
| DE102004059699A1 (de) | Flurförderzeug mit einem höhenveränderlichen Lastaufnahmemittel | |
| DE102021125516A1 (de) | System und Verfahren zur Lastübergabe zwischen einem Flurförderzeug und einem flachen, autonomen Fahrzeug | |
| DE2515429B2 (de) | Lastübergabevorrichtung eines Regalförderzeugs | |
| DE2900809A1 (de) | Hublader fuer regalbedienung | |
| DE102017121919A1 (de) | Flurförderzeug |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20120317 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B66F 17/00 20060101ALI20120503BHEP Ipc: B66F 9/075 20060101AFI20120503BHEP |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 580812 Country of ref document: AT Kind code of ref document: T Effective date: 20121115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502011000153 Country of ref document: DE Effective date: 20121213 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20121024 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130124 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130224 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130204 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130225 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130125 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130124 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20130725 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502011000153 Country of ref document: DE Effective date: 20130725 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 |
|
| BERE | Be: lapsed |
Owner name: JUNGHEINRICH A.G. Effective date: 20130930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130929 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130930 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140930 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20110929 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140930 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130929 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 580812 Country of ref document: AT Kind code of ref document: T Effective date: 20160929 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160929 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 8 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20121024 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250919 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20250923 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250925 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20250922 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250930 Year of fee payment: 15 |