DOMAINE TECHNIQUE
-
L'invention concerne les détecteurs ferroviaires placés sur les voies ferrées pour que, lors du passage des trains, ces détecteurs soient actionnés par la première roue du train et engendrent un signal de commande, suite auquel un opérateur pourra commander par exemple des barrières de passage à niveau, des feux de signalisation, des annonces, ... etc.
-
Ces détecteurs comportent donc un ou plusieurs bras, agencés pour être mis en rotation et enfoncés par les roues. Le bras, agissant comme une manivelle va, par sa rotation, actionner un dispositif qui va créer un contact électrique. Celui-ci sera maintenu par une temporisation.
-
La temporisation des détecteurs ferroviaires est primordiale pour deux raisons.
-
Tout d'abord, les opérateurs de transport ferroviaire exigent, pour des raisons de sécurité, que les signaux soient engendrés non par des impulsions, mais par des créneaux temporels. Ces opérateurs veulent être certains que le signal de commande n'est pas provoqué par un défaut électrique.
-
Il est également indispensable que la manivelle ne revienne à l'état de repos qu'après un certain temps pour ne pas être à nouveau entraînée en déplacement par les roues des trains suivant les premières afin d'éviter une usure prématurée des bras (manivelle) en contact avec les roues.
-
Compte tenu de la violence de l'impact de la roue sur la manivelle, les ensembles mécaniques sont soumis à des contraintes fortes fragilisant les détecteurs ferroviaires existants.
-
On notera ici rapidement qu'on place sur les voies trois types de détecteurs : ceux qui détectent les trains venant dans un sens, ceux qui détectent les trains venant dans l'autre sens et ceux qui peuvent détecter les trains venant dans les deux sens. Par sécurité, on utilise deux interrupteurs pour le modèle droite et gauche et un interrupteur pour chaque sens pour le modèle double sens.
-
La temporisation existante sur les détecteurs mécaniques utilise systématiquement une temporisation hydraulique. Les dispositifs hydrauliques des détecteurs ferroviaires, qui sont des dispositifs amortisseurs, comportent, dans un cylindre monté à l'intérieur d'un carter, un piston qu'un levier, fixé à la manivelle, déplace très rapidement dans un sens, ce qui, par aspiration, ouvre un clapet monté en bout du cylindre et par lequel entre dans le cylindre un liquide, généralement de l'huile. L'entraînement du piston par le levier, dans le sens du remplissage du cylindre, s'effectue contre l'action de moyens de rappel, généralement une grosse lame-ressort.
-
Lorsque le levier vient en butée de remplissage, le ressort de rappel déplace le levier et donc aussi le piston, mais dans l'autre sens, contre l'action du liquide se trouvant dans le cylindre, ce qui referme le clapet d'aspiration.
-
Dans les dispositifs connus, le liquide dans le cylindre, poussé par le piston, s'évacue en un courant de fuite dans un organe de vidange, en l'occurrence une vis pointeau coopérant avec un siège conique de clapet de vidange. Le liquide revient alors dans le carter du dispositif de temporisation pour le cycle suivant. C'est quand le piston est au bout de sa course d'aspiration, et donc au début de sa course de refoulement, ou de vidange, que la temporisation commence, mais c'est dès qu'il est déplacé par le levier que le contact électrique est établi.
-
Lorsque le piston, sous l'action du ressort de rappel, a fini de vidanger le cylindre et est retourné en position de repos, le levier, duquel il est resté solidaire, est aussi retourné en position de repos, en butée de temporisation, ce qui met fin à la temporisation.
-
La vis pointeau des dispositifs hydrauliques à courant de fuite est montée en bout d'une tige positionnée par rapport au siège du clapet de vidange en fonction de la durée de temporisation, pour en faire varier la durée en réglant l'espace annulaire autour de la vis pointeau et donc la vitesse d'écoulement du liquide.
-
La temporisation est donc fonction du débit défini par la vis pointeau, autrement dit de l'obturation du siège.
-
Ces dispositifs posent quelques problèmes.
-
Le réglage de la temporisation est particulièrement délicat. En effet, avec les tiges filetées en usage, à la plage de variation de la temporisation, qui s'étend, en théorie, de 0 à 25 secondes, correspond une rotation de la vis pointeau en bout de tige d'un seul tour. Passer de 10 à 15 secondes implique de ne pouvoir tourner la vis pointeau que d'un cinquième de tour. Une telle précision est hasardeuse.
-
Compte tenu des ressorts de rappel utilisés pour repousser le piston, de façon grossière, au tiers de la temporisation, et quelle qu'elle soit, le piston a déjà été repoussé des deux tiers de sa course ce qui occasionne le risque que le bras soit de nouveau frappé par une autre roue du train. Or, plus les manivelles sont frappées, plus elles s'usent et impliquent un changement des détecteurs.
-
Si la température ambiante baisse, la viscosité de l'huile d'amortissement du piston du dispositif de temporisation augmente, la vis pointeau s'écarte alors de son siège, ce qui revient à dérégler la durée de temporisation.
-
Et malheureusement, même si la vis pointeau est en matière plastique du type PMMA qui se rétracte à froid, cette rétractation ne peut raisonnablement pas compenser l'augmentation de la viscosité de l'huile. En effet, une temporisation de 10 secondes à température ambiante de 20 °C pourrait passer à 4 secondes à 70 °C et à 40 secondes à - 40 °C.
-
Compte tenu des vibrations et des efforts sur le détecteur ainsi que de la fragilité relative du PMMA, il existe un risque de rupture de la vis pointeau, qui rendrait inopérant tout le système en cas de casse de la vis pointeau.
-
L'aspiration rapide de l'huile crée un effet de cavitation (pompe à vide) qui fait redescendre le levier et ce n'est que le deuxième impact des roues qui au minimum actionne complètement le mécanisme.
-
Outre le fait d'au moins deux impacts par passage de train, cela occasionne une fragilité sur les clapets qui subissent une ouverture / fermeture rapide et violente, pouvant provoquer une rupture de ceux-ci et rendre le détecteur inactif (la temporisation serait alors nulle).
-
La détection de l'orientation du passage du train (venant de la droite ou de la gauche) se fait dans tous les systèmes connus par un V de sélection. Une tige (actionnée par un levier), ou directement le bras, se déplace sur l'une des rampes d'un V selon que le train provient de la droite ou de la gauche.
-
Ces détecteurs actionnent deux interrupteurs et, de ce fait, le câblage électrique (réalisé en fonction des modèles droite, gauche ou double sélection) est fixe, et de ce fait impose la fabrication de trois modèles différents.
-
Dans le cas des détecteurs existants, il n'existe pas de réglage de la distance entre le bras et le rail. La difficulté de leur pose vient qu'il faut fixer le détecteur en respectant le plan de pose et la distance bras / rail. De plus, si on déplace un détecteur ayant déjà servi, la pose est encore plus délicate.
PRÉSENTATION DE L'INVENTION
-
L'invention de la présente demande vise à éliminer les problèmes posés par les détecteurs ferroviaires à courant de fuite de l'art antérieur.
-
À cet effet, l'invention concerne un détecteur ferroviaire comportant au moins
- un bras rotatif agencé pour être entraîné en rotation par une roue de train, établir un contact électrique et engendrer un signal de commande,
- une tige d'établissement du contact électrique,
- un levier, solidaire en rotation du bras rotatif, agencé pour entraîner la tige en déplacement, contre l'action de moyens de rappel, entre une position de repos et une position active et établir le contact électrique,
- caractérisé par le fait que le rappel de la tige d'établissement du contact électrique en position de repos est temporisé par des moyens exclusivement mécaniques.
-
L'avantage de l'invention réside dans le fait que l'on s'affranchit de la violence de l'impact de la roue du train sur le bras manivelle.
-
Dans une forme de réalisation préférée du détecteur ferroviaire, les moyens de temporisation exclusivement mécaniques comportent
- ∘ une roue de temporisation,
- ∘ un train d'engrenages,
- ∘ des moyens agencés pour solidariser en rotation le train d'engrenages et le bras rotatif,
- ∘ des moyens agencés pour solidariser en rotation le train d'engrenages et la roue de temporisation et
- ∘ des moyens agencés pour contrôler la vitesse de rotation de la roue de temporisation.
-
Dans la forme de réalisation préférée du détecteur de l'invention, il est prévu un temporisateur mécanique rotatif agencé pour n'être entraîné en rotation que lors du rappel en position de repos de la tige d'établissement du contact électrique.
-
Avantageusement, il est prévu une roue libre montée sur le bras agencée pour déclencher la temporisation lors du rappel en position de repos de la tige d'établissement du contact électrique.
-
Lors de l'impact de la roue du train sur le bras, la rotation du bras s'effectue dans le sens libre de la roue libre, donc sans effort sur les autres éléments mécaniques du détecteur.
-
Il est intéressant que la roue libre soit solidaire en rotation d'une roue dentée en prise sur une roue d'engrenage d'un train d'engrenages du temporisateur rotatif.
-
Le temporisateur mécanique peut être un temporisateur à frein à friction réglable, peu sensible aux variations de température.
-
De préférence encore, c'est la roue libre qui est agencée pour solidariser en rotation le train d'engrenages et le bras rotatif.
-
Avantageusement, la roue de temporisation est montée dans un module de temporisation agencé pour la solidariser au train d'engrenages et il est prévu des moyens pour entraîner la cessation de la temporisation.
-
Il est très intéressant que le module de temporisation comporte un pendule de freinage et que la roue de temporisation et le pendule de freinage soient agencés pour que le pendule puisse freiner la rotation de la roue de temporisation.
-
Les moyens de l'invention présentent l'avantage d'être indépendants de la température dont l'influence est quasiment nulle dans la plage de fonctionnement d'un détecteur ferroviaire, de l'ordre de - 30 °C à + 70 °C.
PRÉSENTATION DES FIGURES
-
L'invention sera mieux comprise à l'aide de la description suivante de plusieurs formes de réalisation du détecteur de l'invention, en référence au dessin en annexe, sur lequel
- la figure 1 représente un schéma bloc du détecteur ;
- la figure 2 représente, en perspective, une des deux parties de la chaîne cinématique d'une première forme de réalisation du détecteur d'un côté d'une platine portant, de l'autre côté, les moyens d'établissement du contact électrique ;
- la figure 3 représente, en perspective, une des deux parties de la chaîne cinématique d'une deuxième forme de réalisation du détecteur d'un côté d'une platine portant, de l'autre côté, les moyens d'établissement du contact électrique ;
- la figure 4 représente en perspective la même partie de la chaîne cinématique de la figure 3, mais tournée de 180° ;
- la figure 5 représente en perspective le train d'engrenages du temporisateur mécanique du détecteur des figures 3 et 4, avec la roue de temporisation et les moyens pour solidariser en rotation cette roue et le train d'engrenages ;
- la figure 6 représente les moyens de contrôle de la vitesse de rotation de la roue de temporisation du détecteur des figures 3 à 5 ;
- la figure 7 représente une vue d'ensemble du détecteur de la figure 2, avec sa chaîne cinématique et ses moyens d'établissement du contact électrique ;
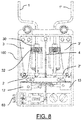
- la figure 8 représente une vue d'ensemble du détecteur de la figure 3, avec sa chaîne cinématique et des moyens d'établissement du contact électrique et
- la figure 9 représente les moyens d'établissement du contact électrique.
DESCRIPTION DÉTAILLÉE DE L'INVENTION
-
Le schéma bloc du détecteur de l'invention, dans ses deux formes de réalisation, a été simplifié pour mieux appréhender les caractéristiques essentielles du détecteur.
-
Le détecteur, tel que représenté, comporte un bras manivelle rotatif 1, sur lequel une roue de train 50 peut venir frapper. Un levier 2 est solidaire en rotation du bras 1, contre l'action d'une lame ressort 3.
-
Le levier 2 est agencé pour déplacer une tige de sélection 4 contre l'action d'une tige ressort de rappel 41.
-
La tige de sélection peut agir sur deux contacteurs 9, 10 agencés pour actionner deux groupes d'interrupteurs 12, 13.
-
La tige de sélection est donc une tige d'établissement d'un contact électrique qui engendre un signal de commande 101.
-
Le rappel de la tige de sélection 4 en position de repos est temporisé par une chaîne de moyens exclusivement mécaniques 100, qu'on qualifie de temporisateur mécanique rotatif, et comprenant une roue libre 39, un train d'engrenages 33, 34 et les moyens de temporisation particuliers décrits ci-après.
-
Vont maintenant être décrites en détails les deux formes de réalisation d'un détecteur ferroviaire à double sens, et d'abord les éléments communs aux deux formes qui, par souci de simplicité mais aussi de clarté, sont référencés par les mêmes chiffres (figures 2, 3, 4, 7, 8, 9).
-
Le détecteur comporte, pour chaque sens, un bras manivelle 1, 1' monté rotatif dans des paliers du châssis 100 du détecteur. Solidaire de chaque bras rotatif, un levier 2, 2', donc agencé pour être entraîné en rotation dans un sens et dans l'autre avec le bras, est soumis à l'action d'une lame ressort 3, 3' - il peut y en avoir plusieurs associées à chaque levier - pour le rappeler dans le sens de rotation inverse de celui provoqué par le passage d'une roue de train sur le bras manivelle 1, 1'.
-
Le levier 2, 2' est conformé pour entraîner en déplacement une seule tige 4, dite de sélection, introduite dans une seule fente de sélection 5 d'une platine 26 du châssis du détecteur. La tige 4 est commune aux deux sens. La fente 5 est une fente à deux rampes 6, 7 en V, pour les deux sens de passage des trains, respectivement, servant au guidage de la tige 4 lors de son déplacement par le levier 2, 2' le long d'une des deux rampes 6, 7.
-
En position de repos, c'est-à-dire avant le passage d'un train et le contact électrique n'étant pas établi, la tige 4 se trouve plaquée contre le sommet 8 de la fente 5, à la confluence des deux rampes 6, 7 sous l'action d'une tige ressort de rappel 41, ancrée dans le châssis du détecteur, de laquelle elle est solidaire par une bague 42.
-
En référence à la figure 9, représentant l'ensemble électrique 11 du détecteur à double sens, de l'autre côté de la platine 26, opposé à celui des bras 1, 1' et leviers 2, 2', cet ensemble électrique comporte deux contacteurs 9, 10, dont le contacteur 9 est associé au bras 1 et au levier 2. L'extrémité de la tige 4 fait saillie hors de la rampe 7 de la fente 5 sur la figure 9. Elle y a été engagée par le passage d'un train sur le bras 1.
-
On notera ici que les deux rampes servant respectivement au passage des trains dans les deux sens, la tige 4 sera qualifiée de tige de sélection. En effet, pour ce qui concerne le bras 1, le levier 2 ne peut pousser la tige 4 que le long de la rampe 7 de la fente 5.
-
Les contacteurs 9, 10 sont montés pivotant autour d'un axe 30 monté sur la platine 26. Toujours associés aux bras 1, 1' sont disposés sur la platine 26, par sécurité, deux groupes d'interrupteurs 12, 13, identiques, représentés à la figure 4 dans leur position de repos et fonctionnant en parallèle. Chacun de ces quatre interrupteurs comporte un plot de repos 14 et un plot 15 d'activation du contact électrique et, entre les deux, un plot 16 d'établissement du contact électrique porté par une lame ressort 17 rappelée naturellement vers le plot d'activation 15.
-
Chaque contacteur 9, 10 comporte ici un bras 18, monté sur l'axe 30, prolongé par une plaquette 19 formant un coude avec le bras 18 et conformée et disposée pour coopérer avec les interrupteurs 12, 13 et la tige 4. À cet effet, les plaquettes 19 portent deux dents 20, 21 en saillie et coopérant avec les lames ressorts 17 des interrupteurs. Lorsque les bras 1, 1' ne sont pas frappés par une roue de train, chaque dent s'étend normalement au-dessus (sur la figure 9) de l'extrémité de la lame ressort 17 associée pour maintenir la lame ressort en position de repos électrique et contrarier sa fonction ressort l'entraînant vers le plot d'activation 15. Toujours en référence à la figure 9, le bras 1 ayant été frappé par une roue de train et la tige de sélection 4 ayant été poussée dans la rampe 7, le contacteur 10 est libre de pivoter autour de son axe 30, les dents 20, 21 du contacteur 10 ont alors été poussées par leurs lames ressorts 17 sous l'action de leur fonction ressort qui entraîne ainsi le contacteur, et ici le contacteur 10, en rotation dans le sens des aiguilles d'une montre sur la figure 9, alors que les lames ressorts 17 des interrupteurs 13 tournent pour ainsi dire dans le sens inverse des aiguilles d'une montre.
-
La coopération des dents 20, 21 avec les lames ressorts 17 est dictée par la position de la tige de sélection 4 dans l'une ou l'autre des rampes 6, 7 de la fente 5.
-
De surcroît, on soulignera que les plaquettes 19 possèdent un bord arrière 22 avec lequel peut coopérer la tige 4, bord qui s'étend, lors de la coopération, sensiblement parallèlement à la rampe dans laquelle se trouve la tige 4.
-
Une roue libre 39 (figures 2 et 4) est montée sur chaque bras 1, 1', duquel elle est donc solidaire en rotation dans un sens. Lors de l'impact d'une roue de train sur un bras, la rotation du bras s'effectue dans le sens libre de la roue 39, donc sans effort sur les éléments mécaniques en aval de la roue libre 39.
-
La roue libre 39 est solidaire en rotation d'une roue dentée 32 en prise sur une roue d'engrenage 33 en entrée d'un train d'engrenages 34.
-
La chaîne 100, qui commence avec la roue libre 39, se termine avec le temporisateur mécanique rotatif qui va maintenant être décrit.
-
Première forme de réalisation des
figures 2
,
7
.
-
Le train d'engrenages 34 (figure 2) sort sur un frein à friction réglable 35, ici en appui contre l'arbre 36 du train d'engrenages.
-
La roue libre 39 (figure 2) est montée sur un manchon 31 broché sur chaque bras 1, 1', duquel elle est donc solidaire en rotation dans un sens.
-
La chaîne 100, qui commence avec la roue libre 39, se termine avec le frein 35.
-
Le train d'engrenages est de préférence un réducteur multiplicateur planétaire à étages du commerce permettant une démultiplication forte dans un espace réduit.
Deuxième forme de réalisation des figures 3, 4, 5, 6, 8.
-
Tout d'abord, en référence à la figure 5, la roue 33 est donc la roue d'entrée du train d'engrenages 34 qui est en fait un train démultiplicateur pour démultiplier la faible rotation de la roue 33 entraînée par le bras 1 par l'intermédiaire de la roue 32 quand elle est solidarisée au bras.
-
L'arbre de sortie 70 du train 34 s'étend jusqu'à l'intérieur d'un module de temporisation 75 en portant à son extrémité, à l'intérieur du module, le premier disque 76 d'un embrayage donc à disques 77. L'embrayage 77 comporte un deuxième disque 78 monté sur un arbre d'embrayage 79 portant, à l'intérieur du module de temporisation 75, un premier pignon de renvoi 80 engrenant avec un deuxième pignon de renvoi 81 monté en bout d'un arbre de temporisation 82.
-
Les disques 76, 78 de l'embrayage 77 sont formés ici pour coopérer par friction.
-
Mais d'autres coopérations sont également possibles.
-
En référence à la figure 6, l'arbre de temporisation 82 porte une roue dentée de temporisation 83, dont les dents 84 sont angulairement relativement espacées les unes des autres, ici d'environ 45°.
-
Un pendule de freinage 85 est monté libre en pivotement sur un axe 86, ici entre la roue de temporisation 83 et le deuxième pignon de renvoi 81.
-
Le pendule de freinage 85, ici en forme de croissant, porte en saillie perpendiculaire, donc parallèlement aux arbres 79, 82 et à l'axe 86, deux picots 87, 88 qui s'étendent, vers le train 34, au-delà des dents 84 de la roue de temporisation 83.
-
Ainsi, quand la roue de temporisation 83 est entraînée en rotation, ici dans le sens contraire des aiguilles d'une montre sur la figure 6, par la roue dentée 33, entraînée par la roue 32 alors solidarisée au bras 1 et au levier 2 lors du retour de la tige de sélection 4 en position de repos, la roue de temporisation 83 est contrariée dans sa rotation par le pendule 85 et ses picots 87, 88.
-
À titre purement explicatif pour la compréhension du lecteur, sans que cela ne doive avoir d'influence sur la portée de la présente demande, en référence à la figure 6, la dent 89 de la roue 83 vient de heurter le picot 87, vient même de taper contre lui, ce qui a freiné la roue dans sa rotation.
-
La dent 89 fait alors basculer le pendule 85 dans le sens des aiguilles d'une montre avant que le picot 88 ne vienne frapper la dent 84 de la roue 83, soit ici la deuxième dent avant la dent 89, et que le pendule 85 rebascule dans le sens contraire des aiguilles d'une montre.
-
Ainsi, le pendule 85 devient animé d'un mouvement de pivotement alternatif, autour de son axe 86 pour freiner la roue de temporisation 83 jusqu'à la cessation de la temporisation qui va être expliquée ci-après.
-
La roue de temporisation 83, dans son mouvement de rotation ralenti, entraîne aussi de façon ralentie le bras 1 par l'intermédiaire de l'arbre 82, des pignons de renvoi 81, 80, de l'arbre 79, de l'embrayage 77, du train d'engrenages 34 et des roues 33, 32 et ce, jusqu'à ce que l'embrayage 77 soit devenu inopérant.
-
On soulignera que les éléments disposés dans le module de temporisation 75 constituent l'ensemble des moyens agencés pour solidariser en rotation le train d'engrenages 34 et la roue de temporisation 83.
-
De plus, le pendule 85 constitue les moyens contrôlant la vitesse de rotation de la roue de temporisation 83.
-
Il est en outre prévu des moyens pour entraîner la cessation de la temporisation.
-
À l'extérieur du flasque externe 90 du module de temporisation 75 est monté un doigt 91 interrupteur de temporisation.
-
Ce doigt, qui est coudé, est monté pivotant, autour d'une tige 92 ancrée dans un étrier 93 fixé à l'extérieur du flasque, et contre l'action d'un ressort 94, ici de torsion, qui rappelle la portion du doigt éloignée de l'étrier en position de repos perpendiculairement au flasque 90.
-
L'arbre d'embrayage 79 s'étend à travers le flasque 90 pour faire légèrement saillie hors du flasque. L'arbre 79 est mobile en translation à travers le flasque. L'amplitude de la translation est suffisamment faible pour que le pignon de renvoi 80 monté sur l'arbre 79 reste toujours engrené sur l'autre pignon de renvoi 81.
-
Une vis 95 de commande de la cessation de la temporisation est fixée au doigt 91, parallèlement à lui et pour en faire saillie de façon réglable. L'homme du métier concevra ce réglage aisément.
-
En référence à la figure 4, en position de repos du bras 1, le levier 2, par une jambe 96, a fait pivoter le doigt 91. La vis 95, qui avait poussé l'arbre 79 pour que le disque 78 de l'embrayage 77 soit en contact avec le disque 76, a relâché l'arbre 79 qui, sous l'action de moyens ressorts évidents pour l'homme du métier, a écarté les deux disques de l'embrayage l'un de l'autre, rendant l'embrayage inopérant.
-
Quand, sous l'action d'une roue de train, le bras 1 et le levier 2 pivotent, la jambe 96 du levier 2 relâche le doigt 91 qui, sous l'action de son ressort 94, reprend sa position sensiblement perpendiculaire au flasque 90, la vis 95 revenant pousser l'arbre 79 en position d'embrayage pour rendre l'embrayage 77 opérationnel.
-
On comprendra aisément maintenant que c'est par la position réglable de la vis 95 le long du doigt 91 qu'on règle la cessation de la temporisation.
Fonctionnement des formes de réalisation du détecteur.
-
À l'état de repos, la tige de sélection 4 se trouve à l'intérieur 23 des deux coudes formés entre les plaquettes 19 et les bras 18 des contacteurs 9, 10 et bloque leur rotation.
-
Dans le cas représenté sur la figure 9, la tige 4, contre l'action de sa tige ressort de rappel 41, a été poussée par le bras 1 et le levier 2 dans la rampe 7 de la fente 5. La tige 4 continue donc de bloquer le contacteur 9 en rotation. Les lames ressorts 17 des interrupteurs du groupe 12 restent bloquées par les dents 20, 21 de la plaquette 19 du contacteur 9 et ne permettent pas que les plots 16 d'établissement de contact électrique se jettent sur les plots 15 d'activation du contact électrique des interrupteurs 12.
-
L'autre contacteur 10, libéré par la tige 4 ayant quitté l'intérieur 23 de son coude, a pu pivoter, dans le sens des aiguilles d'une montre sur la figure 9, sous l'action des lames ressorts 17 des interrupteurs du groupe 13 qui ont repoussé les dents 20, 21 de sa plaquette 19. Les lames ressorts 17 des interrupteurs du groupe 13 ont jeté leurs plots 16 de contact électrique sur les plots 15 d'activation du contact électrique.
-
La tige 4, ayant été repoussée au fond de la rampe 7 par le passage de la première roue d'un train sur le bras manivelle 1, sous l'action de sa tige 41 de rappel en position de repos, à l'intérieur des coudes des contacteurs 9, 10, va donc commencer à coulisser le long de cette rampe 7, mais de manière ralentie, c'est-à-dire temporisée.
-
On notera que, au cours de sa rotation provoquée par l'impact d'une roue de train, le bras 1 est freiné et limité dans sa rotation par la (ou les) lame(s) ressort(s) 3, grâce à un bec 97 du levier 2 solidaire de l'arbre 1, en appui contre la lame ressort 3 (figure 4).
-
Lorsque le bras 1 arrive à la fin de sa course rotative définie par une butée (non représentée) sur laquelle la lame ressort 3, entraînée par le bec 97 du levier 2, vient en appui et que, sous l'action de rappel de la lame ressort, le bras 1 tend à vouloir tourner en sens inverse, la roue libre 39 se bloque et devient solidaire en rotation du bras 1.
-
En référence aux figures 2, 3 et 4, ne représentant que la partie du détecteur relative au bras manivelle 1, mais l'autre partie relative au bras 1' est identique, la roue libre 39 ne pouvant tourner, sur la figure 2, que dans le sens inverse des aiguilles d'une montre, engrène, par la roue 32, avec la première roue 33 du train d'engrenages 34 freiné ici par le frein à friction réglable 35 de la première forme de réalisation et par le module de temporisation 75 de la deuxième forme de réalisation.
-
Ce n'est donc qu'après un créneau temporel que la tige 4, en appui contre un pied 98 du levier 2 (figures 3, 4) rejoint le sommet, c'est-à-dire le fond, 8 de la fente 5 pour immobiliser en rotation le contacteur 10, ses dents 20, 21 ayant alors repoussé les lames ressorts 17 des interrupteurs du groupe 13 pour écarter les plots 16 des plots d'activation 15 et ainsi couper le contact électrique.
-
On notera encore que le train d'engrenages 34 permet de démultiplier la rotation du bras manivelle et de régler finement la temporisation. Plus particulièrement, pour ce qui concerne la deuxième forme de réalisation, l'embrayage 77 étant coupé en position de repos du détecteur, quand un train arrive sur le détecteur, il fait pivoter dans un sens le bras 1, le levier 2, contre l'action du ressort 3, et le pied 98 du levier 2 fait monter la tige de sélection 4 dans l'une des deux rampes 6, 7 de la fente 5.
-
Puis le levier 2 vient en butée et, sous l'action du ressort 3, commence à pivoter dans l'autre sens. La roue libre 39 se bloque sur le bras 1 et entraîne la roue 32 et toutes les roues et autres pignons jusqu'à la roue de temporisation 83.
-
Du fait du pivotement du levier 2, et donc de sa jambe 96, le doigt 91 interrupteur de temporisation devient libre de pivoter dans sa position de repos sous l'action de son ressort 94. Sa vis 95 pousse alors l'arbre 79 pour entraîner le disque 78 contre le disque 76 et donc rendre l'embrayage 77 fonctionnel.
-
La roue de temporisation 83, entraînée en rotation, est toutefois freinée par le pendule 85 et toutes les roues de la chaîne cinématique sont également ralenties.
-
Le levier 2 pivote également et vient à un instant t donné, par sa jambe 96, faire pivoter le doigt 91, contre l'action de son ressort 94, pour relâcher, par sa vis 95, l'arbre 79 et couper l'embrayage 77.
-
t est l'instant de la cessation de la temporisation et dépend de la longueur de la vis 95 en saillie hors du doigt 91. Cette longueur est naturellement réglable pour régler l'inclinaison du doigt 91 sur le flasque 90 en position de repos et donc pour contrôler l'instant désiré de la cessation de la temporisation.
-
Le détecteur qui vient d'être décrit, dans ses deux formes de réalisation, est un détecteur à deux bras 1, 1'. Le premier bras qui est percuté par une roue de train déplace la tige de sélection 4 dans la fente 5 en V, ce qui rend le deuxième bras inopérant sur la tige de sélection. Grâce à cela, on peut donc détecter le sens de déplacement du train.
-
Il faut également souligner que les interrupteurs d'un des deux groupes sont déclenchés lors du passage d'un train dans un sens, les interrupteurs de l'autre des deux groupes, lors du passage d'un train dans l'autre sens.
-
Pour participer au réglage de la temporisation, on peut modifier la force des lames ressorts 3, 3', par leur épaisseur, leur forme et leur nombre. On modifie ainsi la vitesse de retour en position de repos des leviers 2, 2' solidaires des bras rotatifs 1, 1' et, de ce fait, la vitesse de rotation des roues et pignons de la chaîne cinématique.
-
L'inertie et les frottements dans le train d'engrenages 34 créent de toute façon une temporisation, qui est la temporisation minimale, sans activer le frein à friction de la première forme de réalisation ou le module de temporisation 75 de la deuxième forme de réalisation.
-
Dans la première forme de réalisation, le frein à friction 35, en appui ici contre l'arbre 36 du train d'engrenages 34, permet de ralentir la rotation du train. On peut ainsi augmenter ou diminuer le temps de retour en position initiale de la tige de sélection 4.
-
La roue dentée 32, normalement solidaire en rotation de la roue libre 39, pourrait être débrayable et, quand elle est débrayée, la temporisation devient alors nulle, ce qui permet de compter les essieux du train.
-
Le détecteur à double sens qui vient d'être décrit permet de détecter la venue d'un train de la droite, ou de la gauche ou dans les deux sens.
-
En l'espèce, le détecteur comporte ici une seule prise extérieure 60 et deux sélecteurs permettent de sélectionner l'une des trois options.
-
Les interrupteurs 13 sont déclenchés lors du passage d'un train venant de la droite, les interrupteurs 12, lors du passage d'un train venant de la gauche.
-
Pour ne détecter qu'un seul sens de passage, on utilise les deux interrupteurs d'un des deux groupes 12, 13, pour détecter le double sens de passage, un détecteur de chacun des deux groupes 12, 13.
-
Dans le cas où le détecteur ne serait pourvu que d'un seul bras manivelle, ce détecteur ne pourrait détecter que le passage d'un train, sans distinction de sens. Mais c'est une option qui n'est pas forcément négligeable.