EP4008679B1 - Grue à flèche articulée, pour application offshore - Google Patents
Grue à flèche articulée, pour application offshore Download PDFInfo
- Publication number
- EP4008679B1 EP4008679B1 EP21211889.7A EP21211889A EP4008679B1 EP 4008679 B1 EP4008679 B1 EP 4008679B1 EP 21211889 A EP21211889 A EP 21211889A EP 4008679 B1 EP4008679 B1 EP 4008679B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- boom
- knuckle
- crane
- downstream end
- jib
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/04—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack
- B66C13/06—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for minimising or preventing longitudinal or transverse swinging of loads
- B66C13/063—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for minimising or preventing longitudinal or transverse swinging of loads electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/185—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes for use erecting wind turbines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/06—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes with jibs mounted for jibbing or luffing movements
- B66C23/08—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes with jibs mounted for jibbing or luffing movements and adapted to move the loads in predetermined paths
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/02—Devices for facilitating retrieval of floating objects, e.g. for recovering crafts from water
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/48—Automatic control of crane drives for producing a single or repeated working cycle; Program control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/36—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes mounted on road or rail vehicles; Manually-movable jib-cranes for use in workshops; Floating cranes
- B66C23/52—Floating cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/36—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes mounted on road or rail vehicles; Manually-movable jib-cranes for use in workshops; Floating cranes
- B66C23/52—Floating cranes
- B66C23/53—Floating cranes including counterweight or means to compensate for list, trim, or skew of the vessel or platform
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/64—Jibs
- B66C23/68—Jibs foldable or otherwise adjustable in configuration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/72—Counterweights or supports for balancing lifting couples
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F11/00—Lifting devices specially adapted for particular uses not otherwise provided for
- B66F11/04—Lifting devices specially adapted for particular uses not otherwise provided for for movable platforms or cabins, e.g. on vehicles, permitting workmen to place themselves in any desired position for carrying out required operations
- B66F11/044—Working platforms suspended from booms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/16—Arrangement of ship-based loading or unloading equipment for cargo or passengers of lifts or hoists
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/82—Luffing gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/84—Slewing gear
Definitions
- the present invention relates to the technical field of maritime cranes, and in particular that of articulated boom cranes for offshore applications.
- the vessel must be equipped with a crane with specific requirements.
- Such cranes are for example described in the documents WO2019/190314 , US-4 854 800 , which discloses the preamble of claim 1, NL-2 016 444 Or WO-2017/007320 .
- This constraint involves compensation for the movement of the vessel in all directions at the crane level.
- the present invention provides an articulated boom crane for offshore application.
- the jib boom comprises a main boom and a jib, in series, which main boom and which jib each have an upstream end and a downstream end.
- the support structure comprises articulation means (slewing mechanism) for defining a pivoting movement of the articulated boom about a pivot axis (slewing).
- articulation means for defining a pivoting movement of the articulated boom about a pivot axis (slewing).
- downstream end of the main boom and the upstream end of the terminal boom cooperate by means of downstream articulation means to define a folding movement of said terminal boom along a downstream articulation axis (folding).
- control means comprise an active compensation module (Active 3D Compensation) which is designed to control said maneuvering means, taking into account data coming from a motion acquisition module (MRU - Motion Reference Unit), so as to stabilize the downstream end of the terminal arrow, advantageously in a horizontal plane and/or a vertical position, more preferably in all directions.
- Active 3D Compensation an active compensation module which is designed to control said maneuvering means, taking into account data coming from a motion acquisition module (MRU - Motion Reference Unit), so as to stabilize the downstream end of the terminal arrow, advantageously in a horizontal plane and/or a vertical position, more preferably in all directions.
- Said at least one second linear actuator is connected to said support structure and to said terminal boom.
- Said at least one second linear actuator is connected to said terminal boom via mechanical transmission means.
- the mechanical transmission means comprise a deformable parallelogram structure which comprises at least one longitudinal arm, interposed between said at least one second linear actuator and said terminal boom, advantageously extending opposite and along the main boom, and at least two oscillating arms, each interposed between said longitudinal arm and the main boom.
- the present invention thus ensures stabilization of the downstream end of the terminal boom by controlling, in combination, the pivoting movement of the articulated boom, the oscillation movement of the main boom and the folding movement of the terminal boom.
- the folding movement of the terminal boom implemented by said at least one second linear actuator which is connected to the support structure (instead of the main boom), requires reduced power for the swinging movement of the main boom.
- This approach is interesting because the swinging movement of the main boom (lifting) consumes most of the energy in compensation mode.
- the articulated boom crane also comprises a platform which is secured to the downstream end of the terminal boom by means of connection means.
- the present invention also relates to a machine for offshore application, equipped with an articulated boom crane according to the invention, for example a wind farm Service Operation Vessels (SOVs).
- SOVs Wind farm Service Operation Vessels
- the present invention also relates to the aforementioned platform, as such, with its connection means.
- the knuckle boom crane 1 according to the invention also called a “crane” or “knuckle boom crane” in English, is suitable for offshore applications.
- Such an articulated boom crane 1 is advantageously designed to equip a machine for offshore application (not shown - also called “offshore machine”).
- This crane 1 is thus suitable for being embarked on the “offshore” machine, for example a service operation vessel (also called “Service Operation Vessel”).
- a service operation vessel also called “Service Operation Vessel”.
- machine refers in particular to marine machines, in particular ships, for example a wind farm service operation vessel (also known as a “wind farm Service Operation Vessel” or “wind farm SOV” in English).
- a wind farm service operation vessel also known as a “wind farm Service Operation Vessel” or “wind farm SOV” in English.
- This crane 1 is thus useful, without being limiting, for the maneuvering of tools and spare parts for intervention on offshore wind turbines.
- the support structure 2 advantageously consists of a barrel or mast.
- This support structure 2 comprises articulation means 21 (also called “slewing mechanism”), for example an orientation ring with ball bearing, to define a pivoting movement of the articulated boom 3 along a pivot axis 21' (also called “slewing”).
- articulation means 21 also called “slewing mechanism”
- orientation ring with ball bearing for example an orientation ring with ball bearing
- This 21' pivot axis thus gives a degree of freedom in rotation to the articulated boom 3.
- the support structure 2 and the upstream end 312 of the main boom 31 cooperate by means of upstream articulation means 35 to define an oscillation movement of said main boom 31 along an upstream articulation axis 35' (also called “luffing" or lifting movement), advantageously horizontal and perpendicular to the pivot axis 21'.
- upstream articulation means 35 also called "luffing" or lifting movement
- the main boom 31 is intended to be maneuvered in rotation relative to the support structure 2, around this upstream articulation axis 35' located at its upstream end 312.
- downstream end 313 of the main boom 31 and the upstream end 322 of the terminal boom 32 cooperate by means of downstream articulation means 36 to define a folding movement of said terminal boom 32 along a downstream articulation axis 36' (called “folding" axis), advantageously horizontal and perpendicular to the pivot axis 21'.
- the terminal boom 32 is intended to be maneuvered in rotation relative to the main boom 31, around the downstream articulation axis 36' located at its upstream end 322.
- the upstream 35 and downstream 36 articulation means advantageously consist of articulations, for example in the form of rolling bearings, which are arranged between the assembled ends (for example of the bearing/pin type).
- the upstream 35' and downstream 36' articulation axes extend parallel to each other, advantageously horizontally.
- the downstream end 323 of the terminal boom 32 is controlled in space by the maneuvering means 4 which are controlled by the control means 5.
- upstream ends 421, 431 and downstream ends 422, 432 are advantageously assembled within the crane 1 by means of upstream and downstream articulation means which advantageously consist of articulations, for example in the form of rolling bearings (for example of the bearing/trunnion type).
- said at least one pivot actuator 41 consists, for example, of a motor member integrated into the support structure 2.
- linear actuators 42, 43 advantageously consist of hydraulic cylinders, preferably associated with a hydraulic unit (not shown).
- the linear actuators 42, 43 can also consist of electric cylinders.
- control means 5 are designed to control the maneuvering means 4 so as to stabilize (in space, advantageously along the three axes) the downstream end 323 of the terminal boom 32.
- control means 5 are designed to stabilize the downstream end 323 of the terminal boom 32 in a horizontal plane and/or a vertical position, or even in all directions.
- horizontal plane we advantageously mean a stabilization in the plane defined by the width (x or abscissa axis, horizontal) and the depth (y or ordinate axis).
- vertical position we advantageously mean a height stabilization (z axis or dimension, vertical).
- all directions we advantageously mean stabilization in width (x-axis or abscissa, horizontal), in depth (y-axis or ordinate) and in height (z-axis or dimension, vertical).
- control means 5 comprise an active compensation module 51 (also called “Active 3D Compensation”) which is designed to control the maneuvering means 4, taking into account data coming from a movement acquisition module 7 (also called “MRU” for “Motion Reference Unit”), so as to stabilize the downstream end 323 of the terminal boom 32, advantageously in a horizontal plane and/or a vertical position, or even in all directions.
- active compensation module 51 also called “Active 3D Compensation”
- MRU Motion Reference Unit
- the active compensation module 51 is thus structured to control the maneuvering means 4 so as to compensate for the movements of the crane 1, and in particular of the downstream end 323 of the terminal boom 32, caused by the waves.
- Such an active compensation module 51 thus provides precise positioning of the downstream end 323 of the terminal boom 32, making it possible to maintain this downstream end 323 of the terminal boom 32 in a constant position.
- control means 5 comprise a computer.
- active compensation module 51 comprises a computer program which comprises instructions which, when said computer program is executed by said computer, form the data collection means 511, the processing means 512 and the control means 513, when it is executed on said computer.
- the active compensation module 51 thus advantageously constitutes a computer-controlled system which makes it possible to maintain the position of the downstream end 323 of the terminal boom 32 (compensating for movements caused by waves), using the maneuvering means 4.
- the operator can control the articulated boom crane 1 via the control means 5, during which the movements caused by the waves are compensated by the active compensation module 51.
- the processing means 512 advantageously comprise a mathematical model or algorithm, which determines the control instructions for the maneuvering means 4, which are adapted to stabilize the downstream end 323 of the terminal boom 32 as a function of the data coming from the movement acquisition module 7 (or, in other words, adapted to compensate for the movements caused by the waves).
- the maneuvering means 4 are controlled by the active compensation module 51 according to the invention so as to maneuver the downstream end 323 of the terminal boom 32, advantageously along the three axes, taking into account the information coming from the movement acquisition module 7 so as to stabilize (in space, advantageously along the three axes) this downstream end 323 of the terminal boom 32.
- the movement acquisition module 7 can be chosen from among the movement acquisition modules 7 known to those skilled in the art.
- Such a movement acquisition module 7, advantageously conventional in itself, is designed to record and evaluate the movements of the craft due to the waves and, as a corollary, the movements of the downstream end 323 of the terminal boom 32.
- This movement acquisition module 7 consists, for example, of an inertial unit.
- the articulated boom crane 1 may include this movement acquisition module 7; alternatively, this movement acquisition module 7 may equip the machine.
- the articulated arrow 3, illustrated on the Figures 1 to 3 is particularly suitable for equipping an articulated boom crane 1 whose control means 5 include such an active compensation module 51.
- such an articulated boom 3 according to the invention is intrinsically interesting, possibly for equipping an articulated boom crane 1 whose control means 5 are devoid of such an active compensation module 51 or when the compensation mode 51 is inactivated.
- said at least one second linear actuator 43 here has a particular layout in that it is connected here to the support structure 2 and to the terminal arrow 32.
- the folding movement of the terminal boom 32 requires reduced power for the oscillating movement of the main boom 31.
- This approach is interesting because the oscillating movement of the main boom 31 (lifting) consumes most of the energy in compensation mode.
- said at least one second linear actuator 43 is advantageously connected to the terminal boom 32 by means of mechanical transmission means 45 (see in particular the figure 3 ).
- said at least one longitudinal arm 461 advantageously extends opposite and along the main boom 31, in particular its upper front wall 315.
- Said at least two oscillating arms 462 (here in the form of a ladder or H) are assembled, in a rotatable manner (free to rotate), with the longitudinal arm 461 and the main boom 31.
- the swing arms 462 are assembled here with the upper front wall 315 of the main boom 31.
- the mechanical transmission means 45 also comprise a junction member 47, interposed between the downstream end 4612 of said at least one longitudinal arm 461 and the upstream end 322 of the terminal boom 32.
- This junction member 47 extends the terminal arrow 32 on the side of its upstream end 322.
- the mechanical transmission means 45 comprise a connecting rod-crank type assembly, with the intermediate arm 471 forming a connecting rod and the extension section 325 forming a crank.
- said at least one first linear actuator 42 (also called “luffing cylinder”) is arranged between the support structure 2 and the main boom 31.
- Said at least one first linear actuator 42 extends here opposite the lower front wall 314 of the main boom 31.
- said at least one first linear actuator 42 and said at least one second linear actuator 43 are located on either side of the main boom 31, for example respectively facing its lower front wall 314 and its upper front wall 315.
- the articulated boom crane 1 may also comprise a winch drum 8 associated with rotation drive means (not shown, for example at least one motor, advantageously electric or hydraulic) and intended to receive an elongated lifting member 81 (advantageously a cable, for example a metal cable or a synthetic cable).
- rotation drive means not shown, for example at least one motor, advantageously electric or hydraulic
- elongated lifting member 81 a cable, for example a metal cable or a synthetic cable.
- the winch drum 8 is here carried by the terminal boom 32, at its upper face 325 and on the side of its upstream end 322.
- the articulated boom 3 is advantageously equipped with pulleys 82, here distributed along the terminal boom 32, which are sized, distributed and arranged to guide the elongated lifting member 81 between the winch drum 8 and the load to be lifted (not shown).
- the active compensation module 51 is designed to also control the winch drum 8 (in particular its rotation drive means), taking into account data coming from the movement acquisition module 7, so as to control the winding (and unwinding) movement of the winch drum 8.
- the winch drum 8 may be used to smooth the vertical compensation, in order to maintain the vertical position of the free end of the elongated lifting member 81.
- This approach offers the advantage of allowing a second-order, vertical (in height) correction, in combination with the movements of the articulated boom 3.
- the stabilization of the downstream end 323 of the terminal boom 32 (by controlling the maneuvering means 4) is coordinated with the winding movement of the winch drum 8.
- the active compensation module 51 thus advantageously constitutes a computer-controlled system which makes it possible to maintain the downstream end 323 of the terminal boom 32 using the operating means 4, or even to maintain the free end (intended to cooperate with a load) of the elongated lifting member 81 in a determined vertical position.
- the processing means 512 advantageously comprise a mathematical model or algorithm, which determines the control instructions for the maneuvering means 4 which are adapted to stabilize the downstream end 323 of the terminal boom 32 (or also the control instructions for the winch drum 8, in particular its rotation drive means, which are adapted to vertically stabilize the free end of the elongated lifting member 81 in a determined vertical position) as a function of the data coming from the movement acquisition module 7.
- the articulated boom crane 1 also advantageously includes a platform 9 which is secured to the downstream end 323 of the terminal boom 32 by means of connection means 10.
- platform we advantageously mean a structure intended to receive individuals (generally a cabin) or loads, with a view to their transfer.
- the platform 9 is advantageously suspended from the articulated boom 3 by means of the connection means 10.
- connection means 10 ensure active stabilization of the platform 9 during movements of the articulated boom 3.
- This active stabilization advantageously occurs at least along one axis of rotation in pitch (advantageously horizontal) and along one axis of rotation in yaw (advantageously vertical).
- the platform 9 advantageously defines a reception plane 91 which is advantageously intended to be horizontally stable, advantageously in pitch and yaw.
- the yaw rotation axis 101' and the pitch rotation axis 102' advantageously extend in the same plane; the yaw rotation axis 101' and the pitch rotation axis 102' preferably converge at 90°.
- the actuators 101, 102 advantageously consist of rotary actuators, for example motors, preferably electric motors.
- the active compensation module 51 is advantageously designed to also control the actuators 101, 102 equipping the connection means 10, taking into account data coming from a movement acquisition module (advantageously equipping the platform 9), so as to actively stabilize the platform 9, advantageously in yaw and pitch.
- the active compensation module 51 is thus structured to control the actuators 101, 102 of the connection means 10 so as to prevent the swings generated by the movements of the articulated boom 3, and in particular of the downstream end 323 of the terminal boom 32.
- the active compensation module 51 thus provides active stabilization of the platform 9 with respect to the movements of the downstream end 323 of the terminal boom 32.
- the active compensation module 51 thus advantageously constitutes a computer-controlled system which makes it possible to stabilize the platform 9 (preventing or compensating for the swings caused by the movement of the articulated boom 3), using the actuators 101, 102 of the connection means 10.
- the actuators 101, 102 of the connection means 10 are controlled by the active compensation module 51 according to the invention so as to stabilize the platform 9, taking into account the information coming from the dedicated movement acquisition module.
- connection means 10 comprise a connecting member 105 integrating the aforementioned actuators 101, 102.
- the assembly of the first end 1051 with the downstream end 323 of the terminal boom 32, on the one hand, and of the second end 1052 with the platform 9, is for example carried out by means of a bearing, for example a smooth bearing or a rolling bearing, equipped with the actuators 101, 102.
- a bearing for example a smooth bearing or a rolling bearing, equipped with the actuators 101, 102.
- the connecting member 105 is advantageously secured laterally to the downstream end 323 of the terminal arrow 32.
- the point of intersection between the yaw rotation axis 101' and the pitch rotation axis 102' is advantageously located at the downstream end 323 of the terminal boom 32.
- This embodiment has the advantage of keeping the position of the yaw rotation axis 101' and the pitch rotation axis 102' at the downstream end 323 of the terminal boom 32.
- connection means 10 comprise damping means 106, advantageously passive, conferring a degree of freedom in translation of the platform 9 relative to the downstream end 323 of the terminal boom 32.
- the damping means 106 allow clearance between the ends 1051, 1052 of the connecting member 105.
- the damping means 106 thus define a translation axis 106' which is parallel to the yaw rotation axis 101'.
- the shock absorbing means 106 are advantageously placed between the upper section 1055 and the lower section 1056.
- the damping means 106 consist, for example, of a spring and a visco-hydraulic suspension, to prevent jerky movements of the platform 9.
- the platform 9 consists for example of a cabin adapted to receive at least one individual.
- the reception plan 91 corresponds advantageously to the floor of this cabin.
- the platform 9 advantageously comprises at least one passive shock-absorbing member 95 (for example elastomer blocks), adapted to absorb contact with the environment.
- passive shock-absorbing member 95 for example elastomer blocks
- the damping member 95 is for example adapted to cooperate with a receiving surface R consisting of a platform carried by the mast of a wind turbine, as illustrated in the figure 6 .
- said at least one shock-absorbing member 95 is advantageously located at the level of the receiving plane 91, for example on at least one side and/or below (for example at the level of an access door 93).
- the platform 9 is advantageously equipped with manual control means (not shown), for the manual control of the actuators 101, 102 of the connection means 10.
- connection means 10 cooperate by means of removable connection means, integrating electrical and mechanical connection means (in particular for the power supply of the actuators 101, 102 of the connection means 10).
- the removable connecting means are advantageously provided between the downstream end 323 of the terminal arrow 32 and the first end 1051 (upper) of the connecting member 105.
- the connecting member 105 is thus carried by the platform 9, after separation from the downstream end 323 of the terminal boom 32.
- the platform 9, with its connection means 10, could possibly be adapted to an articulated boom crane other than that according to the invention.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Automation & Control Theory (AREA)
- Jib Cranes (AREA)
Description
- La présente invention concerne le domaine technique des grues maritimes, et en particulier celui des grues à flèche articulée pour application offshore.
- Au cours des dernières années, un nouveau marché s'est développé pour les navires pour service d'opération en parc éolien (wind farm Service Operation Vessels - SOVs).
- Sur ces navires, il est nécessaire d'emporter des outils et des pièces de rechange en vue d'intervenir sur les éoliennes en mer (ou éoliennes offshore) qui sont implantées au large des côtés sur une plate-forme attachée à une fondation.
- Or les opérations offshore en haute mer sont compliquées par les mouvements du navire occasionnés par les vagues. Malgré cet environnement, une manipulation contrôlée des charges est indispensable à un travail en toute sécurité.
- Pour remédier à cette contraintes, le navire doit être équipé d'une grue présentant des exigences spécifiques.
- De telles grues sont par exemple décrites dans les document
WO2019/190314 ,US-4 854 800 , qui divulgue le préambule de la revendication 1 ,NL-2 016 444 WO-2017/007320 . - En effet, la précision du positionnement de la charge, et de l'extrémité de la flèche de la grue, est cruciale pour éviter les collisions avec la plate-forme de l'éolienne.
- Cette contrainte implique une compensation du mouvement du navire dans toutes les directions au niveau de la grue.
- Pour cela, une approche a été de concevoir une grue dont la flèche est modifiée avec une flèche terminale montée mobile en translation sur une flèche principale.
- Une autre approche a consisté à rapporter une interface dédiée entre l'outil et la pointe de la flèche.
- Ces solutions de l'art antérieur n'étant pas entièrement satisfaisantes, il existe un besoin d'une nouvelle solution offrant une compensation du mouvement du navire dans toutes les directions.
- Afin de remédier à l'inconvénient précité de l'état de la technique, la présente invention propose une grue à flèche articulée, pour application offshore.
- La grue à flèche articulée comprend :
- une structure support (crâne house),
- une flèche articulée (knuckle boom), portée par ladite structure support,
- des moyens de manoeuvre de ladite structure support et de ladite flèche articulée, et
- des moyens de commande, pour le pilotage desdits moyens de manoeuvre.
- La flèche articulée comprend une flèche principale (main boom) et une flèche terminale (jib), en série, laquelle flèche principale et laquelle flèche terminale comportent chacune une extrémité amont et une extrémité aval.
- La structure support comprend des moyens d'articulation (slewing mechanism) pour définir un mouvement de pivotement de la flèche articulée selon un axe de pivotement (slewing).
- La structure support et laquelle extrémité amont de la flèche principale coopèrent par le biais de moyens d'articulation amont pour définir un mouvement d'oscillation de ladite flèche principale selon un axe d'articulation amont (luffing).
- L'extrémité aval de la flèche principale et l'extrémité amont de la flèche terminale coopèrent par le biais de moyens d'articulation aval pour définir un mouvement de pliage de ladite flèche terminale selon un axe d'articulation aval (folding).
- Les moyens de manoeuvre comportent :
- au moins un actionneur en pivotement, pour générer le mouvement de pivotement de ladite flèche articulée,
- au moins un premier actionneur linéaire (luffing cylinder), pour générer ledit mouvement d'oscillation de ladite flèche principale, et
- au moins un second actionneur linéaire (folding cylinder), pour générer ledit mouvement de pliage de ladite flèche terminale.
- Et lesdits moyens de commande comportent un module de compensation active (Active 3D Compensation) qui est conçu pour piloter lesdits moyens de manoeuvre, tenant compte de données provenant d'un module d'acquisition des mouvements (MRU - Motion Référence Unit), de sorte à stabiliser l'extrémité aval de la flèche terminale, avantageusement dans un plan horizontal et/ou une position verticale, de préférence encore dans toutes les directions.
- Ledit au moins un second actionneur linéaire est raccordé à ladite structure support et à ladite flèche terminale.
- Ledit au moins un second actionneur linéaire est raccordé à ladite flèche terminale par l'intermédiaire de moyens de transmission mécanique.
- Et les moyens de transmission mécanique comprennent une structure de parallélogramme déformable qui comprend au moins un bras longitudinal, interposé entre ledit au moins un second actionneur linéaire et ladite flèche terminale, s'étendant avantageusement en regard et le long de la flèche principale, et au moins deux bras oscillants, intercalés chacun entre ledit bras longitudinal et la flèche principale.
- La présente invention assure ainsi une stabilisation de l'extrémité aval de la flèche terminale par un pilotage, en combinaison, du mouvement de pivotement de la flèche articulée, du mouvement d'oscillation de la flèche principale et du mouvement de pliage de la flèche terminale.
- Le mouvement de pliage de la flèche terminale, mis en oeuvre par ledit au moins un second actionneur linéaire qui est raccordé à la structure support (au lieu de la flèche principale), nécessite une puissance réduite pour le mouvement d'oscillation de la flèche principale. Cette approche est intéressante car le mouvement d'oscillation de la flèche principale (relevage) consomme l'essentiel de l'énergie en mode de compensation.
- D'autres caractéristiques non limitatives et avantageuses de ce mode de réalisation conforme à l'invention, prises individuellement ou selon toutes les combinaisons techniquement possibles, sont les suivantes :
- ledit au moins un second actionneur linéaire comporte deux extrémités, une extrémité amont assemblée directement avec la structure support, et une extrémité aval assemblée avec la flèche terminale par l'intermédiaire des moyens de transmission mécanique ;
- les moyens de transmission comportent encore un organe de jonction, intercalé entre une extrémité aval dudit au moins un bras longitudinal et l'extrémité amont de la flèche terminale, lequel organe de jonction prolonge ladite flèche terminale du côté de son extrémité amont, et laquelle extrémité aval dudit au moins
- D'autres caractéristiques non limitatives et avantageuses du produit conforme à l'invention, prises individuellement ou selon toutes les combinaisons techniquement possibles, sont les suivantes :
- ledit au moins un premier actionneur linéaire (luffing cylinder) est agencé entre la structure support et la flèche principale ; de préférence, ledit au moins un premier actionneur linéaire et ledit au moins un second actionneur linéaire sont implantés de part et d'autre de la flèche principale, par exemple respectivement regard d'une paroi frontale inférieure et d'une paroi frontale supérieure ;
- ledit grue à flèche articulée comporte un tambour de treuil associé à des moyens d'entraînement en rotation et destiné à recevoir un organe de levage allongé ; de préférence, ledit module de compensation active est conçu pour piloter également ledit tambour de treuil, tenant compte de données provenant dudit module d'acquisition des mouvements, de sorte à piloter le mouvement d'enroulement dudit tambour de treuil ;
- ledit au moins un premier actionneur linéaire et/ou ledit au moins un second actionneur linéaire consiste en un vérin hydraulique ou en un vérin électrique ;
- le module de compensation comprend des moyens de collecte des données provenant du module d'acquisition des mouvements (MRU - Motion Référence Unit), des moyens de traitement, pour déterminer des instructions de commande pour les moyens de manoeuvre qui sont adaptées à stabiliser l'extrémité aval de la flèche terminale, voire aussi des instructions de commande pour le tambour de treuil, et des moyens de pilotage, pour piloter lesdits moyens de manoeuvre, voire aussi ledit tambour de treuil, tenant compte desdites instructions de commande ;
- ladite grue à flèche articulée comporte un module d'acquisition des mouvements (MRU - Motion Référence Unit).
- De manière générale, selon un mode de réalisation particulier, la grue à flèche articulée comporte encore une plateforme qui est solidarisée avec l'extrémité aval de la flèche terminale par l'intermédiaire de moyens de raccordement.
- Les moyens de raccordement comportent une combinaison d'au moins deux actionneurs :
- au moins un premier actionneur en pivotement, destiné à générer un mouvement de pivotement de ladite plateforme par rapport à ladite extrémité aval, selon un axe de rotation en lacet qui est parallèle audit axe de pivotement de la flèche articulée, et
- au moins un second actionneur en pivotement, destiné à générer un mouvement de pivotement de ladite plateforme par rapport à ladite extrémité aval, selon un axe de rotation en tangage qui est parallèle à l'axe d'articulation amont et à l'axe d'articulation aval.
- Et le module de compensation active est conçu pour piloter lesdits au moins deux actionneurs desdits moyens de raccordement, tenant compte de données provenant d'un module d'acquisition des mouvements, de sorte à stabiliser activement ladite plateforme, avantageusement en lacet et en tangage.
- D'autres caractéristiques non limitatives et avantageuses, en lien avec la plateforme, prises individuellement ou selon toutes les combinaisons techniquement possibles, sont les suivantes :
- les moyens de raccordement comportent un organe de liaison intégrant lesdits au moins deux actionneurs, lequel organe de liaison comporte deux extrémités : une première extrémité, supérieure, solidarisée avec ladite extrémité aval de la flèche terminale et une second extrémité, inférieure, solidarisée avec ladite plateforme ; de préférence, ladite première extrémité comporte ledit au moins un second actionneur en pivotement, et ladite second extrémité comporte ledit au moins un premier actionneur en pivotement ; encore de préférence, l'organe de liaison est solidarisé latéralement avec l'extrémité aval de la flèche terminale, et ledit organe de liaison comporte deux tronçons : un tronçon supérieur, rectiligne et parallèle à l'axe de rotation en lacet, de sorte que l'axe de rotation en tangage traverse ladite extrémité aval de la flèche terminale, et un tronçon inférieur, recourbé, de sorte que l'axe de rotation en lacet traverse ladite extrémité aval de la flèche terminale ;
- les moyens de raccordement comportent des moyens amortisseurs, avantageusement passifs, conférant un degré de liberté en translation de ladite plateforme par rapport à l'extrémité aval de la flèche terminale, selon un axe de translation parallèle à l'axe de rotation en lacet ;
- la plateforme se présente sous la forme d'une cabine adaptée à recevoir au moins un individu ;
- la plateforme comporte au moins un organe amortisseur de choc, passif, adapté à amortir les contacts / les chocs avec l'environnement ;
- la plateforme est équipée de moyens de pilotage manuel desdits au moins deux actionneurs des moyens de raccordement ;
- l'extrémité aval de la flèche terminale et les moyens de raccordement coopèrent par le biais de moyens de liaison amovible, intégrant des moyens de raccordement électrique et mécanique.
- La présente invention concerne encore un engin pour application offshore, équipé d'une grue à flèche articulée selon l'invention, par exemple un navire pour service d'opération en parc éolien (wind farm Service Operation Vessels - SOVs).
- La présente invention concerne encore la plateforme précitée, en tant que telle, avec ses moyens de raccordement.
- Bien entendu, les différentes caractéristiques, variantes et formes de réalisation de l'invention peuvent être associées les unes avec les autres selon diverses combinaisons dans la mesure où elles ne sont pas incompatibles ou exclusives les unes des autres.
- De plus, diverses autres caractéristiques de l'invention ressortent de la description annexée effectuée en référence aux dessins qui illustrent des formes, non limitatives, de réalisation de l'invention et où :
- [
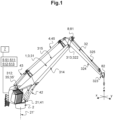
Fig. 1 ] est une vue générale et en perspective d'une grue à flèche articulée selon l'invention ; - [
Fig. 2 ] est une vue générale et de côté d'une grue à flèche articulée selon l'invention ; - [
Fig. 3 ] est une vue partielle et agrandie de la grue à flèche articulée, montrant plus en détails la flèche principale ; - [
Fig. 4 ] est une vue générale et en perspective de la grue à flèche articulée selon l'invention, équipée d'une plateforme (en forme de cabine) qui est solidarisée avec l'extrémité aval de la flèche terminale par l'intermédiaire de moyens de raccordement particulier ; - [
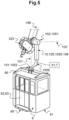
Fig. 5 ] est une vue partielle et agrandie de la grue à flèche articulée selon lafigure 4 , montrant plus en détails la plateforme et les moyens de raccordement ; - [
Fig. 6 ] est une vue générale de la grue à flèche articulée selon l'invention, équipée de la plateforme (en forme de cabine) lors de son positionnement en regard d'une surface de réception. - Il est à noter que, sur ces figures, les éléments structurels et/ou fonctionnels communs aux différentes variantes peuvent présenter les mêmes références.
- La grue à flèche articulée 1 selon l'invention, dite encore « grue » ou « knuckle boom crane » en anglais, est adaptée aux applications offshores.
- Une telle grue à flèche articulée 1 est avantageusement conçue pour équiper un engin pour application offshore (non représenté - dit encore « engin offshore »).
- Cette grue 1 est ainsi adaptée à être embarquée sur l'engin « offshore », par exemple un navire pour service d'opération (dit encore « Service Operation Vessel »).
- Par « engin », on englobe en particulier les engins marins, notamment les navires, par exemple un navire pour service d'opération en parc éolien (dit encore « wind farm Service Operation Vessel » ou « wind farm SOV » en anglais).
- Cette grue 1 est ainsi utile, sans être limitatif, pour la manoeuvre des outils et des pièces de rechange en vue d'intervention sur les éoliennes en mer.
- Tel qu'illustré schématiquement sur les
figures 1 et2 , la grue à flèche articulée 1 comprend : - une structure support 2 (dit encore « crane house »), formant l'interface de la grue 1 avec l'engin,
- une flèche articulée 3 (dit encore « knuckle boom »), portée par la structure support 2,
- des moyens de manoeuvre 4, pour la manoeuvre de la flèche articulée 3 et en particulier de son extrémité aval décrite par la suite, et
- des moyens de commande 5, pour le pilotage de ces moyens de manoeuvre 4.
- La structure support 2 consiste avantageusement en un fût ou mat.
- Cette structure support 2 comprend des moyens d'articulation 21 (dit encore « slewing mechanism »), par exemple une couronne d'orientation avec roulement à billes, pour définir un mouvement de pivotement de la flèche articulée 3 selon un axe de pivotement 21' (dit encore « slewing »).
- Cet axe de pivotement 21' confère ainsi un degré de liberté en rotation à la flèche articulée 3.
- La flèche articulée 3 comprend quant à elle deux parties de flèches 31, 32 (dites encore bras ou tronçons), assemblées en série depuis la structure support 2 :
- une flèche principale 31 (dite encore « main boom »), amont ou proximal, et
- une flèche terminale 32 (dite encore « jib »), aval ou distal.
- La flèche principale 31 et la flèche terminale 32 comportent chacune :
- une extrémité amont 312, 322, située du côté de la structure support 2, et
- une extrémité aval 313, 323, située à distance de la structure support 2.
- La flèche principale 31 et la flèche terminale 32, ici de forme générale parallélépipédique, comportent encore chacune deux faces opposées :
- une face inférieure 314, 324, dite encore « paroi frontale inférieure », destinée à être orientée vers le bas / le sol, et
- une face supérieure 315, 325, dite encore « paroi frontale supérieure », destinée à être orientée vers le haut / le ciel.
- La structure support 2 et l'extrémité amont 312 de la flèche principale 31 coopèrent par le biais de moyens d'articulation amont 35 pour définir un mouvement d'oscillation de ladite flèche principale 31 selon un axe d'articulation amont 35' (dit encore « luffing » ou mouvement de relevage), avantageusement horizontal et perpendiculaire à l'axe de pivotement 21'.
- Ainsi, la flèche principale 31 est destinée à être manoeuvrée en rotation par rapport à la structure support 2, autour de cet axe d'articulation amont 35' situé au niveau de son extrémité amont 312.
- L'extrémité aval 313 de la flèche principale 31 et l'extrémité amont 322 de la flèche terminale 32 coopèrent par le biais de moyens d'articulation aval 36 pour définir un mouvement de pliage de ladite flèche terminale 32 selon un axe d'articulation aval 36' (dit encre « folding »), avantageusement horizontal et perpendiculaire à l'axe de pivotement 21'.
- Ainsi, la flèche terminale 32 est destinée à être manoeuvrée en rotation par rapport à la flèche principale 31, autour de l'axe d'articulation aval 36' situé au niveau de son extrémité amont 322.
- Les moyens d'articulation amont 35 et aval 36 consistent avantageusement en des articulations, par exemple sous la forme de paliers à roulement, qui sont ménagées entre les extrémités assemblées (par exemple du type palier / tourillon).
- Les axes d'articulation amont 35' et aval 36' s'étendent parallèlement l'un par rapport à l'autre, avantageusement horizontalement.
- L'extrémité aval 323 de la flèche terminale 32 est pilotée dans l'espace par les moyens de manoeuvre 4 qui sont pilotés par les moyens de commande 5.
- En particulier, l'extrémité aval 323 est mobile sur les trois axes (dits encore dimensions ou directions), avantageusement selon une position définie dans un système de coordonnées cartésiennes, à savoir avantageusement :
- la largeur (gauche/droite) d'axe x, ou abscisse, horizontal,
- la profondeur (avant/arrière) d'axe y, ou ordonnée, horizontal, et
- la hauteur (haut/bas) d'axe z, ou cote, vertical.
- A cet effet, les moyens de manoeuvre 4 comportent :
- au moins un actionneur en pivotement 41, pour générer le mouvement de pivotement de ladite flèche articulée 3,
- au moins un premier actionneur linéaire 42 (dit encore « luffing cylinder »), par exemple un actionneur linéaire ou deux actionneurs linéaires parallèles, pour générer le mouvement d'oscillation de la flèche principale 31 autour de son axe d'articulation amont 35' (relevage), et
- au moins un second actionneur linéaire 43 (dit encore « folding cylinder »), par exemple un actionneur linéaire ou deux actionneurs linéaires parallèles, pour générer le mouvement de pliage de la flèche terminale 32 autour de son axe d'articulation aval 36'.
- Tel que décrit ci-dessous en relation avec la
figure 3 , ledit au moins un premier actionneur linéaire 42 et ledit au moins un second actionneur linéaire 43 comportent chacun deux extrémités : - une extrémité amont 421, 431, côté de la structure support 2, et
- une extrémité aval 422, 432, opposée à la structure support 2.
- Les extrémités amont 421, 431 et aval 422, 432 sont avantageusement assemblés au sein de la grue 1 par le biais de moyens d'articulation amont et aval qui consistent avantageusement en des articulations, par exemple sous la forme de paliers à roulement (par exemple du type palier / tourillon).
- De manière générale, ledit au moins un actionneur en pivotement 41 consiste par exemple en un organe moteur intégré dans la structure support 2.
- Et les actionneurs linéaires 42, 43 consistent avantageusement en des vérins hydrauliques, de préférence associés à une centrale hydraulique (non représentée). Les actionneurs linéaires 42, 43 peuvent également consister en des vérins électriques.
- Selon l'invention, les moyens de commande 5 sont conçus pour piloter les moyens de manoeuvre 4 de sorte à stabiliser (dans l'espace, avantageusement selon les trois axes) l'extrémité aval 323 de la flèche terminale 32.
- De préférence, les moyens de commande 5 sont conçus pour stabiliser l'extrémité aval 323 de la flèche terminale 32 dans un plan horizontal et/ou une position verticale, voire dans toutes les directions.
- Par « plan horizontal », on entend avantageusement une stabilisation dans le plan défini par la largeur (axe x ou abscisse, horizontal) et la profondeur (axe y ou ordonnée).
- Par « position verticale », on entend avantageusement une stabilisation en hauteur (axe z ou cote, vertical).
- Par « toutes les directions », on entend avantageusement une stabilisation en largeur (axe x ou abscisse, horizontal), en profondeur (axe y ou ordonnée) et en hauteur (axe z ou cote, vertical).
- Pour cela, les moyens de commande 5 comportent un module de compensation active 51 (dit encore « Active 3D Compensation ») qui est conçu pour piloter les moyens de manoeuvre 4, tenant compte de données provenant d'un module d'acquisition des mouvements 7 (dit encore « MRU » pour « Motion Référence Unit »), de sorte à stabiliser l'extrémité aval 323 de la flèche terminale 32, avantageusement dans un plan horizontal et/ou une position verticale, voire dans toutes les directions.
- Le module de compensation active 51 est ainsi structuré pour piloter les moyens de manoeuvre 4 de manière à compenser les mouvements de la grue 1, et en particulier de l'extrémité aval 323 de la flèche terminale 32, occasionnés par les vagues.
- Un tel module de compensation active 51 offre ainsi un positionnement précis de l'extrémité aval 323 de la flèche terminale 32, permettant de maintenir cette extrémité aval 323 de la flèche terminale 32 en position constante.
- Selon un mode de réalisation préféré, le module de compensation active 51 comprend :
- des moyens de collecte des données 511 provenant du module d'acquisition des mouvements 7,
- des moyens de traitement 512, pour déterminer des instructions de commande pour les moyens de manoeuvre 4 qui sont adaptées à stabiliser l'extrémité aval 323 de la flèche terminale 32, et
- des moyens de pilotage 513, pour piloter lesdits moyens de manoeuvre 4 tenant compte desdites instructions de commande.
- En pratique, les moyens de commande 5 comportent un ordinateur. Et le module de compensation active 51 comprend un programme d'ordinateur qui comprend des instructions qui, lorsque ledit programme d'ordinateur est exécuté par ledit ordinateur, forment les moyens de collecte des données 511, les moyens de traitement 512 et les moyens de pilotage 513, lorsqu'il est exécuté sur ledit ordinateur.
- Le module de compensation active 51 constitue ainsi avantageusement un système contrôlé par ordinateur qui permet de maintenir la position de l'extrémité aval 323 de la flèche terminale 32 (compensant les mouvements occasionnés par les vagues), en utilisant les moyens de manoeuvre 4.
- Selon un mode de réalisation particulier, l'opérateur peut piloter la grue à flèche articulée 1 via les moyens de commande 5, au cours de laquelle les mouvements occasionnés par les vagues sont compensés par le module de compensation active 51.
- Les moyens de traitement 512 comportent avantageusement un modèle mathématique ou algorithme, qui détermine les instructions de commande pour les moyens de manoeuvre 4, qui sont adaptées à stabiliser l'extrémité aval 323 de la flèche terminale 32 en fonction des données provenant du module d'acquisition des mouvements 7 (ou, dit autrement, adaptées à compenser les mouvements occasionnés par les vagues).
- Ainsi, en pratique, les moyens de manoeuvre 4 sont pilotés par le module de compensation active 51 selon l'invention de sorte à manoeuvrer l'extrémité aval 323 de la flèche terminale 32, avantageusement selon les trois axes, tenant compte des informations provenant du module d'acquisition des mouvements 7 de sorte à stabiliser (dans l'espace, avantageusement selon les trois axes) cette extrémité aval 323 de la flèche terminale 32.
- Par exemple, l'extrémité aval 323 de la flèche terminale 32 est notamment manoeuvrable selon les axes suivants :
- en largeur par un pilotage coordonné de l'actionneur en pivotement 41 en combinaison avec les premier actionneur linéaire 42 et second actionneur linéaire 43,
- en profondeur par un pilotage coordonné des premier actionneur linéaire 42 et second actionneur linéaire 43, et
- en hauteur par un pilotage coordonné des premier actionneur linéaire 42 et second actionneur linéaire 43.
- De manière générale, le module d'acquisition des mouvements 7 peut être choisi parmi les modules d'acquisition des mouvements 7 connus de l'homme du métier.
- Un tel module d'acquisition des mouvements 7, avantageusement classique en soi, est conçu pour enregistrer et évaluer les déplacements de l'engin dus aux vagues et, en corolaire, les déplacements de l'extrémité aval 323 de la flèche terminale 32.
- Ce module d'acquisition des mouvements 7 consiste par exemple en une centrale inertielle.
- La grue à flèche articulée 1 peut comporter ce module d'acquisition des mouvements 7 ; alternativement, ce module d'acquisition des mouvements 7 peut équiper l'engin.
- En pratique, tel qu'illustré sur la
figure 2 , la flèche articulée 3 comporte deux rayons d'action : - un rayon d'action maximal R1, et
- un rayon d'action maximal nominal R2, dans un mode de compensation (ici inférieur au rayon d'action maximal R1).
- La flèche articulée 3, illustrée sur les
figures 1 à 3 , est particulièrement adaptée à équiper une grue à flèche articulée 1 dont les moyens de commande 5 comportent un tel module de compensation active 51. - De manière générale, une telle flèche articulée 3 selon l'invention est intéressante intrinsèquement, éventuellement pour équiper une grue à flèche articulée 1 dont les moyens de commande 5 sont dépourvus d'un tel module de compensation active 51 ou lorsque le mode de compensation 51 est inactivé.
- En effet, ledit au moins un second actionneur linéaire 43 présente ici une implantation particulière en ce qu'il est raccordé ici à la structure support 2 et à la flèche terminale 32.
- Or, comme abordé précédemment, le mouvement de pliage de la flèche terminale 32, mis en oeuvre par ledit au moins un second actionneur linéaire 43 qui est raccordé à la structure support 2, nécessite une puissance réduite pour le mouvement d'oscillation de la flèche principale 31. Cette approche est intéressante car le mouvement d'oscillation de la flèche principale 31 (relevage) consomme l'essentiel de l'énergie en mode de compensation.
- A cet effet, ledit au moins un second actionneur linéaire 43 est avantageusement raccordé à la flèche terminale 32 par l'intermédiaire de moyens de transmission mécanique 45 (voir en particulier la
figure 3 ). - Dans ce cadre, tel que décrit ci-dessous en lien avec la
figure 3 , ledit au moins un second actionneur linéaire 43 comporte avantageusement deux extrémités : - l'extrémité amont 431 assemblée directement avec la structure support 2, et
- l'extrémité aval 432 assemblée avec la flèche terminale 32 par l'intermédiaire des moyens de transmission mécanique 45.
- Dans ce cadre, ledit au moins un second actionneur linéaire 43 est manoeuvrable en longueur, avec avantageusement :
- un allongement qui provoque un repliement de la flèche terminale 32 vers la flèche principale 31, et
- un raccourcissement qui provoque un déploiement de la flèche terminale 32 par rapport à la flèche principale 31.
- En l'espèce, les moyens de transmission mécanique 45 comprennent une structure de parallélogramme déformable 46 qui comprend :
- au moins un bras longitudinal 461, interposé entre ledit au moins un second actionneur linéaire 43 et la flèche terminale 32, et
- au moins deux bras oscillants 462, intercalés chacun entre le bras longitudinal 461 et la flèche principale 31.
- Sur la
figure 3 , ledit au moins un bras longitudinal 461 s'étend avantageusement en regard et le long de la flèche principale 31, en particulier de sa paroi frontale supérieure 315. - Ledit au moins un bras longitudinal 461 comporte également deux extrémités :
- une extrémité amont 4611 assemblée avec l'extrémité aval 432 dudit au moins un second actionneur linéaire 43, ici par une liaison pivot, et
- une extrémité aval 4612 assemblée avec l'extrémité amont 322 de la flèche terminale 32, ici par une liaison pivot.
- Lesdits au moins deux bras oscillants 462 (ici en forme d'échelle ou de H) sont assemblés, de manière mobile en rotation (libre en rotation), avec le bras longitudinal 461 et la flèche principale 31.
- En particulier, les bras oscillants 462 sont assemblés ici avec la paroi frontale supérieure 315 de la flèche principale 31.
- Un bras oscillant amont 4621 est assemblé :
- d'un premier côté, avec la flèche principale 31 (vers son extrémité amont 312), et
- d'un second côté, avec le couple composé de l'extrémité amont 4611 dudit au moins un bras longitudinal 461 et de l'extrémité aval 432 dudit au moins un second actionneur linéaire 43.
- Un bras oscillant aval 4622 est assemblé :
- d'un premier côté, avec la flèche principale 31 (vers son extrémité aval 313), et
- d'un second côté, avec le couple composé de l'extrémité aval 4612 dudit au moins un bras longitudinal 461 et de l'extrémité amont 322 de la flèche terminale 32.
- Selon le présent mode de réalisation, illustré sur la
figure 3 notamment, les moyens de transmission mécanique 45 comportent encore un organe de jonction 47, intercalé entre l'extrémité aval 4612 dudit au moins un bras longitudinal 461 et l'extrémité amont 322 de la flèche terminale 32. - Cet organe de jonction 47 prolonge la flèche terminale 32 du côté de son extrémité amont 322.
- Et l'extrémité aval 4612 dudit au moins un bras longitudinal 461 coopère avec cet organe de jonction 47 par le biais de moyens d'articulation 475 (pivot).
- En l'espèce, cet organe de jonction 47 se compose ici de deux parties :
- un tronçon rallonge 325, prolongeant la flèche terminale 32 au-delà des moyens d'articulation aval 36 et du côté de la paroi frontale supérieure 315 de la flèche principale 31, et
- un bras intercalaire 471, formant ici une bielle, assemblé avec l'extrémité aval 4612 dudit au moins un bras longitudinal 461 et le tronçon rallonge 325 par le biais de moyens de liaison d'articulation 472 (pivot).
- En d'autres termes, les moyens de transmission mécanique 45 comprennent un ensemble de type bielle - manivelle, avec le bras intercalaire 471 formant bielle et le tronçon rallonge 325 formant manivelle.
- Par ailleurs, ledit au moins un premier actionneur linéaire 42 (dit encore « luffing cylinder ») est agencé entre la structure support 2 et la flèche principale 31.
- Ledit au moins un premier actionneur linéaire 42 s'étend ici en regard de la paroi frontale inférieure 314 de la flèche principale 31.
- En l'espèce, ledit au moins un premier actionneur linéaire 42 comporte avantageusement deux extrémités :
- l'extrémité amont 421 assemblée directement avec la structure support 2, et
- l'extrémité aval 422 assemblée avec la flèche principale 31, au niveau de sa paroi frontale inférieure 314.
- De manière générale, ledit au moins un premier actionneur linéaire 42 et ledit au moins un second actionneur linéaire 43 sont implantés de part et d'autre de la flèche principale 31, par exemple respectivement regard de sa paroi frontale inférieure 314 et de sa paroi frontale supérieure 315.
- De manière générale, comme illustré notamment sur la
figure 1 , la grue à flèche articulée 1 peut comporter encore un tambour de treuil 8 associé à des moyens d'entraînement en rotation (non représenté, par exemple au moins un moteur, avantageusement électrique ou hydraulique) et destiné à recevoir un organe de levage allongé 81 (avantageusement un câble, par exemple un câble métallique ou un câble synthétique). - Le tambour de treuil 8 est ici porté par la flèche terminale 32, au niveau de sa face supérieure 325 et du côté de son extrémité amont 322.
- La flèche articulée 3 est avantageusement équipée de poulies 82, ici reparties le long de la flèche terminale 32, qui sont dimensionnées, réparties et agencées à façon, pour guider l'organe de levage allongé 81 entre le tambour de treuil 8 et la charge à soulever (non représentée).
- Selon un mode de réalisation avantageux, le module de compensation active 51 est conçu pour piloter également le tambour de treuil 8 (en particulier ses moyens d'entraînement en rotation), tenant compte de données provenant du module d'acquisition des mouvements 7, de sorte à piloter le mouvement d'enroulement (et de déroulement) du tambour de treuil 8.
- Dans ce mode de réalisation, le tambour de treuil 8 peut être utilisé pour lisser la compensation verticale, afin de maintenir la position verticale de l'extrémité libre de l'organe de levage allongé 81.
- Cette approche offre l'avantage de permettre une correction de second ordre, verticale (en hauteur), en combinaison des mouvements de la flèche articulée 3.
- Toujours dans ce mode de réalisation, la stabilisation de l'extrémité aval 323 de la flèche terminale 32 (par un pilotage des moyens de manoeuvre 4) est coordonnée avec le mouvement d'enroulement du tambour de treuil 8.
- Selon ce mode de réalisation, le module de compensation active 51 comprend notamment :
- les moyens de traitement 512, pour déterminer des instructions de commande pour les moyens de manoeuvre 4 qui sont adaptées à stabiliser l'extrémité aval 323 de la flèche terminale 32, et le cas échéant pour déterminer des instructions de commande pour le tambour de treuil 8 (en particulier ses moyens d'entraînement en rotation) qui sont adaptées à lisser la compensation verticale, et
- des moyens de pilotage 513, pour piloter les moyens de manoeuvre 4 et, avantageusement le tambour de treuil 8 (en particulier ses moyens d'entraînement en rotation), tenant compte des instructions de commande.
- Le module de compensation active 51 constitue ainsi avantageusement un système contrôlé par ordinateur qui permet de maintenir l'extrémité aval 323 de la flèche terminale 32 en utilisant les moyens de manoeuvre 4, voire aussi pour maintenir l'extrémité libre (destinée à coopérer avec une charge) de l'organe de levage allongé 81 dans une position verticale déterminée.
- Les moyens de traitement 512 comportent avantageusement un modèle mathématique ou algorithme, qui détermine les instructions de commande pour les moyens de manoeuvre 4 qui sont adaptées à stabiliser l'extrémité aval 323 de la flèche terminale 32 (voire aussi les instructions de commande pour le tambour de treuil 8, en particulier ses moyens d'entraînement en rotation, qui sont adaptées à stabiliser verticalement l'extrémité libre de l'organe de levage allongé 81 dans un position verticale déterminée) en fonction des données provenant du module d'acquisition des mouvements 7.
- Selon une caractéristique technique avantageuse illustrée sur les
figures 4 et5 , la grue à flèche articulée 1 comporte encore avantageusement une plateforme 9 qui est solidarisée avec l'extrémité aval 323 de la flèche terminale 32 par l'intermédiaire de moyens de raccordement 10. - Par « plateforme », on entend avantageusement une structure destinée à recevoir des individus (généralement une cabine) ou des charges, en vue de leur transfert.
- La plateforme 9 est avantageusement suspendue à la flèche articulée 3 par l'intermédiaire des moyens de raccordement 10.
- De manière générale, les moyens de raccordement 10 assurent une stabilisation active de la plateforme 9 lors des mouvements de la flèche articulée 3.
- Cette stabilisation active intervient avantageusement au moins selon un axe de rotation en tangage (avantageusement horizontal) et selon un axe de rotation en lacet (avantageusement vertical).
- En d'autres termes, la plateforme 9 définit avantageusement un plan de réception 91 qui est avantageusement destiné à être stabilité horizontalement, avantageusement en tangage et en lacet.
- En particulier, la plateforme 9 coopère ainsi avec la flèche articulée 3 de sorte que :
- l'extrémité aval 323 de la flèche terminale 32 est stabilisée dans l'espace, avantageusement selon les trois axes, et
- la plateforme 9 est stabilisée (de préférence en tangage et en lacet) par rapport au mouvement de l'extrémité aval 323 de la flèche terminale 32.
- A cet effet, les moyens de raccordement 10 comportent une combinaison d'au moins deux actionneurs 101, 102 :
- au moins un premier actionneur en pivotement 101, destiné à générer un mouvement de pivotement de la plateforme 9 par rapport à l'extrémité aval 323, selon un axe de rotation en lacet 101' qui est parallèle à l'axe de pivotement 21' de la flèche articulée 3, et
- au moins un second actionneur en pivotement 102, destiné à générer un mouvement de pivotement de la plateforme 9 par rapport à l'extrémité aval 323, selon un axe de rotation en tangage 102' qui est parallèle à l'axe d'articulation amont 35' et à l'axe d'articulation aval 36'.
- L'axe de rotation en lacet 101' et l'axe de rotation en tangage 102' s'étendent avantageusement dans un même plan ; l'axe de rotation en lacet 101' et l'axe de rotation en tangage 102' sont de préférence concourant à 90°.
- En d'autres termes, lesdits moins deux actionneurs 101, 102 comprennent :
- ledit au moins un premier actionneur en pivotement 101, destiné à générer un mouvement de pivotement de la plateforme 9 selon l'axe de rotation en lacet 101' qui perpendiculaire au plan de réception 91, et
- ledit au moins un second actionneur en pivotement 102, destiné à générer un mouvement de pivotement de la plateforme 9 selon l'axe de rotation en tangage 102' qui est parallèle au plan de réception 91.
- Les actionneurs 101, 102 consistent avantageusement en des actionneurs rotatifs, par exemple en des moteurs, de préférence des moteurs électriques.
- Dans ce mode de réalisation, le module de compensation active 51 est avantageusement conçu pour piloter également les actionneurs 101, 102 équipant les moyens de raccordement 10, tenant compte de données provenant d'un module d'acquisition des mouvements (équipant avantageusement la plateforme 9), de sorte à stabiliser activement la plateforme 9, avantageusement en lacet et en tangage.
- Le module de compensation active 51 est ainsi structuré pour piloter les actionneurs 101, 102 des moyens de raccordement 10 de manière à prévenir les balancements générés par les mouvements de la flèche articulé 3, et en particulier de l'extrémité aval 323 de la flèche terminale 32.
- Le module de compensation active 51 offre ainsi une stabilisation active de la plateforme 9 par rapport aux mouvements de l'extrémité aval 323 de la flèche terminale 32.
- Dans ce cadre, selon un mode de réalisation préféré, le module de compensation active 51 comprend :
- les moyens de traitement 512, pour déterminer également des instructions de commande pour les actionneurs 101, 102 des moyens de raccordement 10 qui sont adaptées à stabiliser activement la plateforme 9, et
- les moyens de pilotage 513, pour piloter les actionneurs 101, 102 des moyens de raccordement 10 tenant compte desdites instructions de commande.
- Le module de compensation active 51 constitue ainsi avantageusement un système contrôlé par ordinateur qui permet de stabiliser la plateforme 9 (prévenant ou compensant les balancements occasionnés par le mouvement de la flèche articulé 3), en utilisant les actionneurs 101, 102 des moyens de raccordement 10.
- Ainsi, en pratique, les actionneurs 101, 102 des moyens de raccordement 10 sont pilotés par le module de compensation active 51 selon l'invention de sorte à stabiliser la plateforme 9, tenant compte des informations provenant du module d'acquisition des mouvements dédié.
- Selon un mode de réalisation préféré, les moyens de raccordement 10 comportent un organe de liaison 105 intégrant les actionneurs 101, 102 précités.
- Cet organe de liaison 105, par exemple en forme de bras, comporte deux extrémités :
- une première extrémité 1051, supérieure, solidarisée avec l'extrémité aval 323 de la flèche terminale 32, et
- une second extrémité 1052, inférieure, solidarisée avec la plateforme 9.
- L'assemblage de la première extrémité 1051 avec l'extrémité aval 323 de la flèche terminale 32, d'une part, et de la second extrémité 1052 avec la plateforme 9, est par exemple réalisé par l'intermédiaire d'un palier, par exemple un palier lisse ou un palier à roulement, équipé des actionneurs 101, 102.
- De préférence, les actionneurs 101, 102 sont répartis au niveau des extrémités 1051, 1052 de l'organe de liaison 105 :
- la première extrémité 1051, supérieure, comporte ledit au moins un second actionneur en pivotement 102, en tangage, et
- la second extrémité 1052, inférieure, comporte ledit au moins un premier actionneur en pivotement 101, en lacet.
- En l'espèce, l'organe de liaison 105 est avantageusement solidarisé latéralement avec l'extrémité aval 323 de la flèche terminale 32.
- Dans ce cas, l'organe de liaison 105 comporte de préférence deux tronçons :
- un tronçon supérieur 1055, rectiligne et parallèle à l'axe de rotation en lacet 101', destiné à s'étendre avantageusement verticalement, de sorte que l'axe de rotation en tangage 102' traverse l'extrémité aval 323 de la flèche terminale 32,
- un tronçon inférieur 1056, recourbé (ou coudé), de sorte que l'axe de rotation en lacet 101' traverse cette même extrémité aval 323 de la flèche terminale 32.
- En d'autres termes, le point d'intersection entre l'axe de rotation en lacet 101' et l'axe de rotation en tangage 102' se situe avantageusement au niveau de l'extrémité aval 323 de la flèche terminale 32.
- Cette forme de réalisation a pour intérêt de garder la position de l'axe de rotation en lacet 101' et de l'axe de rotation en tangage 102' au niveau de l'extrémité aval 323 de la flèche terminale 32.
- Selon encore une caractéristique distinctive, les moyens de raccordement 10 comportent des moyens amortisseurs 106, avantageusement passifs, conférant un degré de liberté en translation de la plateforme 9 par rapport à l'extrémité aval 323 de la flèche terminale 32.
- En d'autres termes, les moyens amortisseurs 106 autorisent un jeu en écartement entre les extrémités 1051, 1052 de l'organe de liaison 105.
- Les moyens amortisseurs 106 définissent ainsi un axe de translation 106' qui est parallèle à l'axe de rotation en lacet 101'.
- Les moyens amortisseurs 106 sont avantageusement rapportés entre le tronçon supérieur 1055 et le tronçon inférieur 1056.
- Les moyens amortisseurs 106 consistent par exemple en un ressort et une suspension visco-hydraulique, pour empêcher des mouvements saccadés de la plateforme 9.
- Selon le mode de réalisation illustré, la plateforme 9 consiste par exemple en une cabine adaptée à recevoir au moins un individu.
- Le plan de réception 91 correspond avantageusement au plancher de cette cabine.
- Le plancher est avantageusement :
- entouré par des parois latérales 92 comportant au moins une porte d'accès 93, et
- surmonté par un plafond 95 qui est avantageusement surmonté par les moyens de raccordement 10.
- La plateforme 9 comporte avantageusement au moins un organe amortisseur de choc 95, passif (par exemple des blocs élastomères), adapté à amortir les contacts avec l'environnement.
- L'organe amortisseur 95 est par exemple adapté à coopérer avec une surface de réception R consistant en une plateforme portée par le mat d'une éolienne, comme illustré sur la
figure 6 . - En l'espèce, ledit au moins un organe amortisseur de choc 95 est avantageusement implanté au niveau du plan de réception 91, par exemple sur au moins un côté et/ou en-dessous (par exemple au niveau d'une porte d'accès 93).
- De manière générale, la plateforme 9 est avantageusement équipée de moyens de pilotage manuel (non représentés), pour le pilotage manuel des actionneurs 101, 102 des moyens de raccordement 10.
- Encore de manière générale, l'extrémité aval 323 de la flèche terminale 32 et les moyens de raccordement 10 coopèrent par le biais de moyens de liaison amovible, intégrant des moyens de raccordement électrique et mécanique (notamment pour l'alimentation en énergie des actionneurs 101, 102 des moyens de raccordement 10).
- Les moyens de liaison amovible sont avantageusement prévus entre l'extrémité aval 323 de la flèche terminale 32 et la première extrémité 1051 (supérieure) de l'organe de liaison 105.
- L'organe de liaison 105 est ainsi porté par la plateforme 9, après séparation par rapport à l'extrémité aval 323 de la flèche terminale 32.
- Ces moyens de liaison amovible sont utiles pour équiper rapidement l'extrémité aval 323 de la flèche terminale 32 avec la plateforme 9, ou pour déposer rapidement cette plateforme 9, en fonction des besoins et des opérations.
- De manière générale, la plateforme 9, avec ses moyens de raccordement 10, pourrait éventuellement être adaptée à une grue à flèche articulée autre que celle selon l'invention.
- Bien entendu, diverses autres modifications peuvent être apportées à l'invention dans le cadre des revendications annexées.
Claims (11)
- Grue à flèche articulée, pour application offshore, laquelle grue à flèche articulée (1) comprend :- une structure support (2),- une flèche articulée (3), portée par ladite structure support (2),- des moyens de manoeuvre (4) de ladite structure support (2) et de ladite flèche articulée (3), et- des moyens de commande (5), pour le pilotage desdits moyens de manoeuvre (4),laquelle flèche articulée (3) comprend une flèche principale (31) et une flèche terminale (32), en série, laquelle flèche principale (31) et laquelle flèche terminale (32) comportent chacune une extrémité amont (312, 322) et une extrémité aval (313, 323),laquelle structure support (2) comprend des moyens d'articulation (21) pour définir un mouvement de pivotement de la flèche articulée (3) selon un axe de pivotement (21'),laquelle structure support (2) et laquelle extrémité amont (312) de la flèche principale (31) coopèrent par le biais de moyens d'articulation amont (35) pour définir un mouvement d'oscillation de ladite flèche principale (31) selon un axe d'articulation amont (35'),laquelle extrémité aval (313) de la flèche principale (31) et laquelle extrémité amont (322) de la flèche terminale (32) coopèrent par le biais de moyens d'articulation aval (36) pour définir un mouvement de pliage de ladite flèche terminale (32) selon un axe d'articulation aval (36'),lesquels moyens de manoeuvre (4) comportent :- au moins un actionneur en pivotement (41), pour générer le mouvement de pivotement de ladite flèche articulée (3),- au moins un premier actionneur linéaire (42), pour générer ledit mouvement d'oscillation de ladite flèche principale (31), et- au moins un second actionneur linéaire (43), pour générer ledit mouvement de pliage de ladite flèche terminale (32),et lesquelles moyens de commande (5) comportent un module de compensation active (51) qui est conçu pour piloter lesdits moyens de manoeuvre (4), tenant compte de données provenant d'un module d'acquisition des mouvements (7), de sorte à stabiliser l'extrémité aval (323) de la flèche terminale (32), avantageusement dans un plan horizontal et/ou une position verticale, de préférence encore dans toutes les directions, ledit au moins un second actionneur linéaire (43) est raccordé à ladite structure support (2) et à ladite flèche terminale (32),lequel au moins un second actionneur linéaire (43) est raccordé à ladite flèche terminale (32) par l'intermédiaire de moyens de transmission mécanique (45),caractérisée en ce que lesdits moyens de transmission mécanique (45) comprennent une structure de parallélogramme déformable qui comprend :- au moins un bras longitudinal (461), interposé entre ledit au moins un second actionneur linéaire (43) et ladite flèche terminale (32), s'étendant avantageusement en regard et le long de la flèche principale (31), et- au moins deux bras oscillants (462), intercalés chacun entre ledit bras longitudinal (461) et la flèche principale (31).
- Grue à flèche articulée, selon la revendication 1, caractérisée en ce que ledit au moins un second actionneur linéaire (43) comporte deux extrémités :- une extrémité amont (431) assemblée directement avec la structure support (2), et- une extrémité aval (432) assemblée avec la flèche terminale (32) par l'intermédiaire des moyens de transmission mécanique (45).
- Grue à flèche articulée, selon l'une quelconque des revendications 1 ou 2, caractérisée en ce que les moyens de transmission mécanique (45) comportent encore un organe de jonction (47), intercalé entre une extrémité aval (4612) dudit au moins un bras longitudinal (461) et l'extrémité amont (322) de la flèche terminale (32),lequel organe de jonction (47) prolonge ladite flèche terminale (32) du côté de son extrémité amont (322), etlaquelle extrémité aval (4612) dudit au moins un bras longitudinal (461) coopère avec ledit organe de jonction (47) par le biais de moyens d'articulation (475).
- Grue à flèche articulée, selon l'une quelconque des revendications 1 à 3, caractérisée en ce que ledit au moins un premier actionneur linéaire (42) est agencé entre la structure support (2) et la flèche principale (31).
- Grue à flèche articulée, selon la revendication 4, caractérisée en ce que ledit au moins un premier actionneur linéaire (42) et ledit au moins un second actionneur linéaire (43) sont implantés de part et d'autre de la flèche principale (31), par exemple respectivement regard d'une paroi frontale inférieure (314) et d'une paroi frontale supérieure (315).
- Grue à flèche articulée, selon l'une quelconque des revendications 1 à 5, caractérisée en ce que ledit grue à flèche articulée (1) comporte un tambour de treuil (8) associé à des moyens d'entraînement en rotation et destiné à recevoir un organe de levage allongé (81),
et en ce que, de préférence, ledit module de compensation active (51) est conçu pour piloter également ledit tambour de treuil (8), tenant compte de données provenant dudit module d'acquisition des mouvements (7), de sorte à piloter le mouvement d'enroulement dudit tambour de treuil (8). - Grue à flèche articulée, selon l'une quelconque des revendications 1 à 6, caractérisée en ce que ledit au moins un premier actionneur linéaire (42) et/ou ledit au moins un second actionneur linéaire (43) consiste en un vérin hydraulique ou en un vérin électrique.
- Grue à flèche articulée, selon l'une quelconque des revendications 1 à 7, caractérisée en ce que le module de compensation active (51) comprend :- des moyens de collecte des données (511) provenant du module d'acquisition des mouvements (7),- des moyens de traitement (512), pour déterminer des instructions de commande pour les moyens de manoeuvre (4) qui sont adaptées à stabiliser l'extrémité aval (323) de la flèche terminale (32), voire aussi des instructions de commande pour le tambour de treuil (8), et- des moyens de pilotage (513), pour piloter lesdits moyens de manoeuvre (4), voire aussi ledit tambour de treuil, tenant compte desdites instructions de commande.
- Grue à flèche articulée, selon l'une quelconque des revendications 1 à 8, caractérisée en ce que ladite grue à flèche articulée (1) comporte un module d'acquisition des mouvements (7).
- Grue à flèche articulée, selon l'une quelconque des revendications 1 à 9, caractérisée en ce que ladite grue à flèche articulée (1) comporte encore une plateforme (9) qui est solidarisée avec l'extrémité aval (323) de la flèche terminale (32) par l'intermédiaire de moyens de raccordement (10),lesquels moyens de raccordement (10) comportent une combinaison d'au moins deux actionneurs (101, 102) :- au moins un premier actionneur en pivotement (101), destiné à générer un mouvement de pivotement de ladite plateforme (9) par rapport à ladite extrémité aval (323), selon un axe de rotation en lacet (101') qui est parallèle audit axe de pivotement (21') de la flèche articulée (3), et- au moins un second actionneur en pivotement (102), destiné à générer un mouvement de pivotement de ladite plateforme (9) par rapport à ladite extrémité aval (323), selon un axe de rotation en tangage (102') qui est parallèle à l'axe d'articulation amont (35') et à l'axe d'articulation aval (36'),et lequel module de compensation active (51) est conçu pour piloter lesdits au moins deux actionneurs (101, 102) desdits moyens de raccordement (10), tenant compte de données provenant d'un module d'acquisition des mouvements, de sorte à stabiliser activement ladite plateforme (9), avantageusement en lacet et en tangage.
- Engin pour application offshore, équipé d'une grue à flèche articulée (1) selon l'une quelconque des revendications 1 à 10, par exemple un navire pour service d'opération en parc éolien.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP24204077.2A EP4464648A3 (fr) | 2020-12-03 | 2021-12-02 | Grue à flèche articulée, pour application offshore |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR2012580A FR3117099B1 (fr) | 2020-12-03 | 2020-12-03 | Grue à flèche articulée, pour application offshore |
| FR2108433A FR3117100B1 (fr) | 2020-12-03 | 2021-08-03 | Grue à flèche articulée, pour application offshore |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP24204077.2A Division EP4464648A3 (fr) | 2020-12-03 | 2021-12-02 | Grue à flèche articulée, pour application offshore |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4008679A1 EP4008679A1 (fr) | 2022-06-08 |
| EP4008679B1 true EP4008679B1 (fr) | 2024-10-23 |
Family
ID=78725396
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP21211889.7A Active EP4008679B1 (fr) | 2020-12-03 | 2021-12-02 | Grue à flèche articulée, pour application offshore |
| EP24204077.2A Pending EP4464648A3 (fr) | 2020-12-03 | 2021-12-02 | Grue à flèche articulée, pour application offshore |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP24204077.2A Pending EP4464648A3 (fr) | 2020-12-03 | 2021-12-02 | Grue à flèche articulée, pour application offshore |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11858783B2 (fr) |
| EP (2) | EP4008679B1 (fr) |
| CN (1) | CN114590721A (fr) |
| BR (1) | BR102021024450A2 (fr) |
| DK (1) | DK4008679T3 (fr) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116477474A (zh) * | 2022-08-08 | 2023-07-25 | 中国船舶重工集团公司第七一三研究所 | 一种船用起重机的自动防摇控制方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3961713A (en) * | 1974-06-28 | 1976-06-08 | Houston Systems, Inc. | Single line davit |
| GB2163402B (en) * | 1984-08-22 | 1987-12-31 | British Aerospace | Open sea transfer of articles |
| EP2194017B1 (fr) | 2008-12-03 | 2011-10-12 | Engineering-Support AS | Grue en mer |
| EP2370925B1 (fr) * | 2008-12-15 | 2021-03-03 | Oceaneering International, Inc. | Système de manipulation pour approvisionnement en câblage |
| NL2004987C2 (nl) | 2010-06-28 | 2011-12-29 | Ihc Holland Ie Bv | Liftinrichting en werkwijze voor het positioneren van een log object. |
| NO336245B1 (no) * | 2010-09-21 | 2015-06-29 | Rolls Royce Marine As | Hivkompensert kran |
| WO2014200354A1 (fr) * | 2012-06-06 | 2014-12-18 | Seaonicas As | Grue hybride |
| MX354333B (es) | 2012-07-16 | 2018-02-26 | Itrec Bv | Grúa marina de pluma articulada. |
| EP3388384B1 (fr) | 2012-08-06 | 2024-07-10 | Itrec B.V. | Navire-grue |
| CN204510303U (zh) | 2015-03-16 | 2015-07-29 | 江西蓝翔重工有限公司 | 多臂组合变幅式挖掘钻装一体机 |
| NL2015113B1 (en) * | 2015-07-07 | 2017-02-01 | Coöperatieve Ver Offshore Coop U A | A method for transporting a person from a first position relative to a watercraft to a second position relative to the watercraft, a device for transporting the person, and a system and a watercraft comprising the device. |
| NL2016444B1 (en) * | 2016-03-04 | 2017-09-19 | U-Sea Beheer B V | Disturbance compensating telescopic knuckle boom crane, ship provided therewith and method therefor |
| EP3318530B1 (fr) * | 2016-11-03 | 2020-04-01 | National Oilwell Varco Norway AS | Procédé de mise à niveau d'une grue à flèche articulée et d'une grue avec compensation de houle |
| US11066279B2 (en) | 2017-04-24 | 2021-07-20 | Itrec B.V. | Motion compensating crane for use on an offshore vessel |
| NL2020664B1 (en) * | 2018-03-26 | 2019-10-07 | Barge Master Ip B V | Offshore crane |
| NL2021862B1 (en) | 2018-10-23 | 2020-05-13 | Itrec Bv | Installation of a wind turbine blade on a hub of a wind turbine |
| CN113135506B (zh) | 2021-04-30 | 2023-05-26 | 三一海洋重工有限公司 | 一种液压平衡起重机 |
-
2021
- 2021-12-02 EP EP21211889.7A patent/EP4008679B1/fr active Active
- 2021-12-02 EP EP24204077.2A patent/EP4464648A3/fr active Pending
- 2021-12-02 DK DK21211889.7T patent/DK4008679T3/da active
- 2021-12-03 BR BR102021024450-0A patent/BR102021024450A2/pt unknown
- 2021-12-03 CN CN202111467073.8A patent/CN114590721A/zh active Pending
- 2021-12-03 US US17/541,713 patent/US11858783B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP4464648A3 (fr) | 2025-01-15 |
| DK4008679T3 (da) | 2024-11-25 |
| BR102021024450A2 (pt) | 2022-06-14 |
| EP4464648A2 (fr) | 2024-11-20 |
| US20220177279A1 (en) | 2022-06-09 |
| CN114590721A (zh) | 2022-06-07 |
| EP4008679A1 (fr) | 2022-06-08 |
| US11858783B2 (en) | 2024-01-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2874827B1 (fr) | Essieu et vehicule comprenant au moins un tel essieu | |
| EP2374635B1 (fr) | Système d'essieu, module d'essieu comprenant au moins un tel système d'essieu et véhicule comprenant au moins un tel module | |
| EP4144918A1 (fr) | Système pour le maintien temporaire, au cours des opérations de battage, d'un pieu de fondation destiné à recevoir le mat d'une éolienne off-shore | |
| EP4049936B1 (fr) | Système de chariot mobile et procédé de mise en oeuvre d'un système de chariot mobile | |
| EP4008679B1 (fr) | Grue à flèche articulée, pour application offshore | |
| EP3247623A1 (fr) | Navire à passerelle télescopique de transfert de personnes entre le navire et un objet stationnaire ou quasiment stationnaire en mer, tel qu'une éolienne | |
| EP1879827B1 (fr) | Dispositif d'élinguage d'une pièce avec compensation d'effort et système de levage le comprenant | |
| FR2956107A1 (fr) | Vehicule elevateur pour le positionnement d'une charge en hauteur | |
| FR3117099A1 (fr) | Grue à flèche articulée, pour application offshore | |
| FR2877659A1 (fr) | Dispositif elevateur, notamment pour permettre l'acces du personnel de maintenance aux differentes parties d'un avion | |
| JP7345391B2 (ja) | 洋上作業中に人々および/または貨物を移送するためのシステム | |
| EP2761061B1 (fr) | Module de service compact et son utilisation dans une usine de production d'aluminium par electrolyse | |
| EP1953112A1 (fr) | Engin de levage | |
| EP1061034A1 (fr) | Chariot automoteur à bras télescopique et rehausse | |
| KR102171114B1 (ko) | 차량용 중량물의 상하차용 장치 | |
| EP4653374A1 (fr) | Engin pour application offshore, comportant un pont équipé d'une grue à flèche articulée | |
| FR3128811A1 (fr) | Système de démantèlement pour une installation nucléaire | |
| FR3015915B1 (fr) | Chassis de vehicule omnidirectionnel comportant des corps de chassis deplacables l'un par rapport a l'autre | |
| EP3842374B1 (fr) | Grue à flèche articulée, pour application offshore | |
| FR2705630A1 (fr) | Engin de transport de charges d'encombrement important équipé d'une plate-forme orientable support de la charge. | |
| FR3112135A1 (fr) | Système pour le stockage et la traction d’un câble, en particulier d’un câble synthétique équipant une grue offshore | |
| EP4361352B1 (fr) | Machine de manutention autonome | |
| FR3105785A1 (fr) | Grue à dispositif de mini pont roulant pour la manutention de composants d’aéronef | |
| FR3156437A3 (fr) | flèche télescopique pour nacelle élévatrice et nacelle élévatrice la comprenant | |
| EP1024108B1 (fr) | Dispositif de contrôle de déplacement d'une structure portante d'engin roulant |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20221206 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230518 |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| INTG | Intention to grant announced |
Effective date: 20240508 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602021020604 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 Effective date: 20241119 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1734704 Country of ref document: AT Kind code of ref document: T Effective date: 20241023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250224 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250223 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250124 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241202 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602021020604 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241202 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20241023 |
|
| 26N | No opposition filed |
Effective date: 20250724 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20241231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241202 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20251114 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20251113 Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20241202 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20251126 Year of fee payment: 5 Ref country code: DK Payment date: 20251118 Year of fee payment: 5 |
|
| PGRI | Patent reinstated in contracting state [announced from national office to epo] |
Ref country code: IT Effective date: 20241231 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20251113 Year of fee payment: 5 Ref country code: NL Payment date: 20251219 Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20211202 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NO Payment date: 20251230 Year of fee payment: 5 |