EP4563055A1 - Staubsauger - Google Patents
Staubsauger Download PDFInfo
- Publication number
- EP4563055A1 EP4563055A1 EP24210174.9A EP24210174A EP4563055A1 EP 4563055 A1 EP4563055 A1 EP 4563055A1 EP 24210174 A EP24210174 A EP 24210174A EP 4563055 A1 EP4563055 A1 EP 4563055A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- vacuum cleaner
- floor nozzle
- floor
- control device
- designed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
- A47L9/2826—Parameters or conditions being sensed the condition of the floor
Definitions
- the invention relates to a hand-held vacuum cleaner for cleaning and maintaining floor surfaces, comprising a handle for guiding the vacuum cleaner when cleaning and maintaining the floor surfaces, a floor nozzle for moving back and forth over the floor surface to be cleaned in a processing direction, a blower for generating a negative pressure for absorbing dirt by means of a suction air flow via the floor nozzle, a separation system for cleaning the absorbed air from dirt, and a control device.
- vacuum cleaners are used to clean surfaces such as textile floor coverings and smooth floors.
- carelessness on the part of the user frequently causes the floor nozzle to come into contact with objects lying around on the floor, which can damage the vacuum cleaner or be damaged by contact with the vacuum cleaner.
- handheld vacuum cleaners the user is responsible for moving the floor nozzle when manually guiding the vacuum cleaner by the handle during cleaning and maintenance of the floor.
- the invention therefore addresses the problem of providing an improved vacuum cleaner.
- a handheld vacuum cleaner is to be provided that assists the user in safely moving the floor nozzle over the floor surface to be cleaned and reduces the risk of damage.
- a vacuum cleaner having the features of patent claim 1. Because the floor nozzle has at least one optical sensor, which is configured to detect a detection area in the working direction in front of and/or behind the floor nozzle, the user can be assisted in safely moving the floor nozzle over the floor area to be cleaned and the risk of damage can be reduced.
- the optical sensor on the floor nozzle can detect objects in front of and/or behind the floor nozzle that could be damaged or that could damage the floor nozzle or the vacuum cleaner.
- the detection area of the optical sensor is located in front of and/or behind the floor nozzle in the working direction.
- the optical sensor can be a camera that captures videos of a detection area in the working direction in front of and/or behind the floor nozzle.
- the optical sensor can also be a ToF (Time of Flight) sensor that The detection area in the direction of travel is to be detected in front of and/or behind the floor nozzle.
- the optical sensor can be installed centrally on the floor nozzle, preferably facing forwards and more preferably close to the floor.
- the optical sensor constantly monitors the area in front of the floor nozzle and detects objects such as cables, items of clothing, small parts and possibly liquids that could damage the vacuum cleaner if they are sucked in.
- Several optical sensors can also be provided in order to cover one detection area in the direction of travel in front of the floor nozzle and another detection area in the direction of travel behind the floor nozzle. This provides the user with optimal support when safely guiding the vacuum cleaner by hand.
- the floor surface can be formed by a textile floor covering such as a carpet or rug or by a hard floor such as wooden parquet, laminate or PVC flooring.
- the vacuum cleaner has a fan to generate negative pressure, which causes a floor nozzle, which is guided over a floor surface to be cleaned and acts as a suction nozzle to pick up dust and dirt from the floor surface.
- a fan to generate negative pressure
- the user moves the floor nozzle back and forth in the direction of travel using pushing and pulling movements. This causes the floor nozzle to glide over the floor surface to be cleaned.
- the underside of the floor nozzle glides over the carpet, while with smooth floors the underside hovers over these floor surfaces at a distance, possibly using spacer bristles.
- the user can do this, for example, by using a handle on the vacuum cleaner connected to the suction tube.
- the suction nozzle of the floor nozzle is elongated and runs essentially perpendicular to the direction of travel.
- elongated means that the preferably essentially rectangular suction nozzle has a greater length perpendicular to the direction of travel than its width in the direction of travel.
- the suction nozzle is preferably between 20 and 30 cm long perpendicular to the direction of travel.
- the vacuum cleaner comprises at least one gyroscope sensor, which is designed to detect the movement of the floor nozzle over the floor surface to be cleaned.
- the position and movement of the vacuum cleaner can be compared with the signals from the optical sensor. If the gyroscope sensor is located in the floor nozzle, the position of the floor nozzle can be directly compared with the signals from the optical sensor. If the gyroscope sensor is located in the handle of the vacuum cleaner, the rotation and movement of the handle can be converted into the resulting movement of the floor nozzle.
- a gyroscope sensor can also be provided in the floor nozzle and a gyroscope sensor in the handle. This allows comprehensive monitoring of the movement of the floor nozzle. Using the data from the optical sensor or the additional gyroscope sensor, the vacuum cleaner movement can be reliably estimated or measured.
- control device is configured to use artificial intelligence to detect and categorize various objects within the detection range of the optical sensor from the data of the optical sensor.
- the detection and categorization of objects within the detection range of the optical sensor supports the user in safely guiding the vacuum cleaner over the floor area to be cleaned.
- the artificial intelligence actively distinguishes between dirt and should be vacuumed up and objects that should not. These include items of clothing, liquids, cables, sharp or pointed objects, or even animals. The risk of damage can be reduced if objects are detected that could be damaged or that could damage the floor nozzle or the vacuum cleaner.
- Artificial intelligence is used to detect and categorize the objects in order to obtain a comprehensive overview of the surroundings of the floor nozzle and the vacuum cleaner.
- the artificial intelligence of the control device receives the data from the optical sensor as an input signal and classifies detected objects and recognizes their position.
- a particularly advantageous embodiment of the invention relates to the control device being configured to categorize the detected objects into dangerous and non-dangerous objects, wherein the dangerous objects category includes those detected objects that can be sucked in via the floor nozzle and would cause damage to the vacuum cleaner and/or the object.
- the differentiation of the detected objects into dangerous and non-dangerous objects using artificial intelligence creates the basis for particularly reliable support for the user in safely guiding the vacuum cleaner over the floor area to be cleaned.
- the control device can reliably differentiate between dangerous and non-dangerous objects and supports the user in maintaining a good overview of the area around the vacuum cleaner or the floor nozzle.
- control device is configured to estimate a travel corridor of the floor nozzle using data from the sensor(s) of the floor nozzle and/or the vacuum cleaner.
- the control device By estimating the travel corridor of the floor nozzle of the handheld vacuum cleaner, conclusions can be drawn about possible obstacles or hazards posed by objects in the potential path of the floor nozzle. In this way, the objects to be detected can be limited to the travel corridor in order to further improve the performance of the artificial intelligence.
- Data from the optical sensor can be taken into account by the control device when estimating the possible travel corridor of the floor nozzle.
- Data from at least one gyroscope sensor can also be used to better estimate a travel corridor of the floor nozzle.
- the gyroscope sensor is configured to detect the movement of the floor nozzle across the floor surface to be cleaned.
- the combination of the data from the at least one optical sensor with the data from the at least one gyroscope sensor offers the possibility of the control device estimating the travel corridor of the floor nozzle particularly reliably. This allows reliable conclusions to be drawn about dangerous objects in the likely path of the floor nozzle.
- the vacuum cleaner thus supports the user in identifying hazards in the floor nozzle's likely path across the surface to be cleaned.
- the object positions from the artificial intelligence plus the gyroscope information preferably combined, determine the position of the objects relative to the floor nozzle. For example, a Kalman filter can track the position of the objects as the vacuum cleaner moves.
- a particularly advantageous embodiment of the invention therefore provides that the vacuum cleaner has a warning device that is configured to be controlled by the control device to emit a warning signal when a dangerous object is located in the travel path of the floor nozzle.
- the warning signal can reliably inform the user about dangerous objects in the potential path of the floor nozzle, thus assisting them in safely guiding the floor nozzle over the surface to be cleaned.
- the warning signal can be emitted via a display and/or a sound from the warning device.
- the warning device can also emit a vibration of the handle as a warning signal when a dangerous object is located in the travel path of the floor nozzle.
- a force perceptible by the hand could also be exerted, which warns the user of a dangerous object in the travel path of the floor nozzle.
- Such a force can be exerted by a vibration sensor on the handle, so that the user receives intuitive feedback on their hand when guiding the vacuum cleaner by hand and can adjust their movement accordingly.
- control device is configured to reduce the suction air flow at the floor nozzle when a dangerous object is located in the travel path of the floor nozzle. If driving over the dangerous object can no longer be avoided because the user does not change the travel path in time or cannot stop the movement of the floor nozzle in time, the dangerous object can also be prevented from being sucked in by reducing the suction air flow at the floor nozzle. To do this, the control device could switch off the fan used to generate the suction air flow. However, a secondary air valve can also be opened automatically, reducing the suction air flow at the floor nozzle even without switching off the fan. The suction of a dangerous object can be prevented by first warning the user.
- the suction can be prevented by reducing the suction power until it switches off.
- the optical sensor on the floor nozzle near the floor also allows for a good estimate of the height of the detected objects. This means that vacuuming only needs to be avoided if the object is actually lying on the floor and the floor nozzle moves over it. If, for example, a cable hangs from a desk to a power outlet, the vacuum cleaner can move underneath it, eliminating the need to avoid vacuuming.
- the floor nozzle has a brush driven by a brush motor for cleaning the floor surface
- the control device is configured to stop the brush motor if a dangerous object is located in the travel path of the floor nozzle. If driving over the dangerous object can no longer be avoided because the user fails to change the travel path in time or is unable to stop the movement of the floor nozzle, the control device can stop the brush motor to prevent further damage to the vacuum cleaner or the object.
- control device is configured to recognize, from the data of the optical sensor, objects moving towards the floor nozzle within the detection range of the optical sensor.
- the user can thus be supported in safely moving the floor nozzle over the floor area to be cleaned and the risk of sucking in moving objects can be reduced.
- This can support the user in safely guiding the vacuum cleaner by hand along moving objects. If a moving object is sucked in, it naturally moves towards the floor nozzle.
- An example of this is a curtain that is pulled towards the vacuum cleaner in the vicinity of the floor nozzle.
- This movement information can be obtained from the video stream a camera as an optical sensor, so that all objects and their movement that are not fixed on the floor surface become visible in the image.
- control device is configured to trigger a warning device of the vacuum cleaner to emit a warning signal when an object within the detection range of the optical sensor moves toward the floor nozzle. This allows the user to be warned in good time before moving objects are inadvertently sucked into the floor nozzle.
- control device is configured to reduce the suction air flow at the floor nozzle when an object within the detection range of the optical sensor moves toward the floor nozzle. This further prevents the unwanted suction of moving objects.
- the floor nozzle comprises a brush driven by a brush motor for cleaning the floor surface.
- the control device is configured to stop the brush motor when an object within the detection range of the optical sensor moves toward the floor nozzle. This prevents the unwanted entanglement of moving objects.
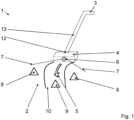
- FIG. 1 Denoted by the reference numeral 1, a vacuum cleaner 1 with a floor nozzle 4 as a suction nozzle is shown purely schematically.
- the representation according to Figure 1 shows a vacuum cleaner 1 according to the invention with a floor nozzle 4 connected to the vacuum cleaner 1.
- the vacuum cleaner 1 shown in the exemplary embodiment is a so-called cordless vacuum cleaner 1.
- the floor nozzle 4 is connected here via its connecting piece 12 to a preferably telescopically designed suction tube 13.
- a fan (not shown) of the vacuum cleaner 1, which is integrated in the vacuum cleaner housing, is powered by an accumulator in order to generate a negative pressure. By means of this negative pressure, dirt and grime are removed from the surface to be cleaned.
- a user of the vacuum cleaner 1 can grasp the handle 3 and thus push the floor nozzle 4 back and forth in pushing and pulling movements in the processing direction 5 in order to clean the floor surface 2.
- the floor nozzle 4 glides over the floor surface 2 to be cleaned. Particularly with long-pile carpets, the underside of the floor nozzle 4 glides over the floor surface 2, while with hard floors the underside hovers over these floor surfaces 2 at a distance, possibly using spacer bristles.
- the floor nozzle 4 of the vacuum cleaner 1 has an optical sensor 6, which is designed to detect a detection area 7 in the processing direction 5 in front of the floor nozzle 4.
- the floor nozzle 4 can also have an optical sensor 6 with a detection area 7 in the processing direction 5 behind the floor nozzle 4.
- a gyroscope sensor (not shown) can be provided on the vacuum cleaner 1, which detects the movement of the floor nozzle 4 over the floor surface 2 to be cleaned.
- the control device (not shown) of the vacuum cleaner 1 can use artificial intelligence to recognize and categorize various objects 8, 9 on the floor surface 2 within the detection area of the sensor 6 from the data of the optical sensor 6.
- the detected objects 8, 9 are categorized by the control device of the vacuum cleaner 1 into dangerous and non-dangerous objects. Those objects that can be sucked in via the floor nozzle 4 and would cause damage to the vacuum cleaner 1 and/or the object 9 are identified as dangerous objects 9.
- the control device can use the data from the optical sensor 6 and the gyroscope sensor to estimate a possible travel corridor 10 of the floor nozzle 4, in which the user is most likely to move the vacuum cleaner.
- a warning device (not shown) of the vacuum cleaner 1 can then be activated if a dangerous object 9 is located in the travel corridor 10 of the floor nozzle 4, in order to issue a warning signal.
- This warning signal can be perceived acoustically, visually, or haptically by the user.
- the control device can also reduce the suction air flow at the floor nozzle 4 if a dangerous object 9 is located in the travel corridor 10 of the floor nozzle 4.
- the control device can also stop the brush motor and thus the brush if a dangerous object 9 is located in the driving corridor 10 directly in front of the floor nozzle 4.
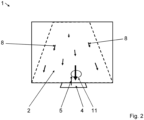
- the Figure 2 shows schematically the camera image of a camera as optical sensor 6 ( Fig. 1 ) for the vacuum cleaner according to Figure 1 .
- the floor nozzle 4 of the vacuum cleaner 1 can also be seen.
- the camera image shows the floor area 2 to be cleaned, which, due to the movement of the floor nozzle 4 in the processing direction 5, moves in the opposite direction in the camera image, along with the objects 8 located thereon.
- a moving object 11 is moving on the floor surface 2 towards the floor nozzle 4, which is indicated by the larger velocity vector.
- the control device can use the camera image to determine objects 11 moving towards the floor nozzle 4 in the detection area 7 ( Fig. 1 ) of camera 6 ( Fig. 1 ). If an object 11 is in the detection area 7 ( Fig. 1 ) of the optical sensor 6 ( Fig.
- the control device can generate a warning signal to the user of the vacuum cleaner 1 via a warning device on the vacuum cleaner 1. This prevents the unwanted suction of moving objects 11. If the floor nozzle 4 moves further towards the moving object 11, the control device can also reduce the suction air flow at the floor nozzle 4. If the floor nozzle 4 has a brush (not shown) driven by a brush motor (not shown) for cleaning the floor surface 2, the control device can also stop the brush motor if a moving object 11 moves towards the floor nozzle 4 within the detection range 7 of the optical sensor 6. This can prevent the moving object from accidentally becoming caught in the brush.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
Die Erfindung betrifft einen Staubsauger (1) zur Reinigung und Pflege von Bodenflächen (2) mit einem Handgriff (3) zum Führen des Staubsaugers (1) bei der Reinigung und Pflege der Bodenflächen (2), einer Bodendüse (4) zur Bewegung über die zu reinigende Bodenfläche (2) in einer Bearbeitungsrichtung (5) vor und zurück, einem Gebläse zur Erzeugung eines Unterdruckes zur Aufnahme von Schmutz mittels eines Saugluftstromes über die Bodendüse (4), einem Abscheidesystem zur Reinigung der aufgenommenen Luft vom Schmutz, und einer Steuereinrichtung, wobei die Bodendüse (4) mindestens einen optischen Sensor (6) aufweist, welcher dazu eingerichtet ist, einen Erfassungsbereich (7) in Bearbeitungsrichtung (5) vor und/oder hinter der Bodendüse (4) zu erfassen.
Description
- Die Erfindung betrifft einen handgeführten Staubsauger zur Reinigung und Pflege von Bodenflächen mit einem Handgriff zum Führen des Staubsaugers bei der Reinigung und Pflege der Bodenflächen, einer Bodendüse zur Bewegung über die zu reinigende Bodenfläche in einer Bearbeitungsrichtung vor und zurück, einem Gebläse zur Erzeugung eines Unterdruckes zur Aufnahme von Schmutz mittels eines Saugluftstromes über die Bodendüse, einem Abscheidesystem zur Reinigung der aufgenommenen Luft vom Schmutz, und einer Steuereinrichtung.
- Im privaten Haushalt sowie im Gewerbe kommen Staubsauger zur Reinigung von Flächen wie textilen Bodenbelägen und glatten Böden zum Einsatz. Insbesondere bei handgeführten Staubsaugern kommt es regelmäßig durch Unachtsamkeit des Benutzers oder der Benutzerin zum Kontakt der Bodendüse mit Gegenständen, die insbesondere auf der Bodenflache herumliegen, welche den Staubsauger beschädigen oder welche durch den Kontakt mit dem Staubsauger beschädigt werden. Bei handgeführten Staubsaugern ist der Benutzer oder die Benutzerin selbst verantwortlich für die Bewegung der Bodendüse, wenn der Staubsauger am Handgriff bei der Reinigung und Pflege der Bodenfläche händisch geführt wird.
- Der Erfindung stellt sich somit das Problem einen verbesserten Staubsauger anzugeben. Insbesondere soll ein handgeführter Staubsauger angegeben werden, der den Benutzer oder die Benutzerin bei der sicheren Bewegung der Bodendüse über die zu reinigende Bodenfläche unterstützt und das Risiko für Beschädigungen reduziert.
- Erfindungsgemäß wird dieses Problem durch einen Staubsauger mit den Merkmalen des Patentanspruchs 1 gelöst. Dadurch, dass die Bodendüse mindestens einen optischen Sensor aufweist, welcher dazu eingerichtet ist, einen Erfassungsbereich in Bearbeitungsrichtung vor und/oder hinter der Bodendüse zu erfassen, kann der Benutzer oder die Benutzerin bei der sicheren Bewegung der Bodendüse über die zu reinigende Bodenfläche unterstützt und das Risiko für Beschädigungen reduziert werden. Über den optischen Sensor an der Bodendüse können Gegenstände, die beschädigt werden könnten oder welche die Bodendüse oder den Staubsauger beschädigen könnten, vor und/oder hinter der Bodendüse erfasst werden. Der Erfassungsbereich des optischen Sensors befindet sich in Bearbeitungsrichtung vor und/oder hinter der Bodendüse. Der optische Sensor kann eine Kamera sein, welche Videos von einen Erfassungsbereich in Bearbeitungsrichtung vor und/oder hinter der Bodendüse zu erfasst. Der optische Sensor kann auch ein ToF(Time of Flight)-Sensor sein, der einen Erfassungsbereich in Bearbeitungsrichtung vor und/oder hinter der Bodendüse zu erfasst. Der optische Sensor kann mittig, vorzugsweise nach vorn gerichtet, weiter vorzugsweise in Bodennähe, an Bodendüse verbaut sein. Der optische Sensor betrachtet permanent den Bereich vor der Bodendüse und detektiert hier Objekte wie Kabel, Kleidungsgegenstände, Kleinteile und eventuell Flüssigkeiten, die dem Staubsauger im Falle eines Einsaugens schaden können. Es können auch mehrere optische Sensoren vorgesehen sein, um einen Erfassungsbereich in Bearbeitungsrichtung vor und einen weiteren Erfassungsbereich in Bearbeitungsrichtung hinter der Bodendüse abzudecken. Hierdurch kann der Benutzer oder die Benutzerin beim sicheren Führen des Staubsaugers per Hand optimal unterstützt werden.
- Die Bodenfläche kann durch einen textilen Bodenbelag wie einen Teppich oder Teppichboden oder durch einen Hartboden wie z. B. ein Holzparkett, Laminat oder einen PVC-Bodenbelag gebildet werden.
- Der Staubsauger weist ein Gebläse zur Erzeugung eines Unterdruckes auf, durch den eine über eine zu reinigende Bodenfläche geführte Bodendüse als Saugdüse Staub und Schmutz von der Bodenfläche aufnimmt. Hierzu wird die Bodendüse durch den Benutzer mittels Schub- und Zugbewegungen in Bearbeitungsrichtung vor und zurück bewegt. Hierdurch gleitet die Bodendüse über die zu reinigende Bodenfläche. Insbesondere bei langflorigen Teppichen gleitet die Unterseite der Bodendüse über den Teppich, während die Unterseite bei Glattböden beabstandet, gegebenenfalls durch Abstandsborsten, über diese Bodenflächen hinweg schwebt. Der Benutzer kann dazu beispielsweise einen mit dem Saugrohr verbundenen Handgriff des Staubsaugers handhaben. Damit die Reinigung und Pflege des Bodenbelags möglichst effektiv ausgeführt werden kann, ist der Saugmund der Bodendüse länglich ausgebildet und verläuft im Wesentlichen quer zur Bearbeitungsrichtung. Länglich ausgebildet bedeutet in diesem Zusammenhang, dass der vorzugsweise im Wesentlichen rechteckige Saugmund eine größere Länge quer zur Bearbeitungsrichtung aufweist, als Breite in Bearbeitungsrichtung. Der Saugmund ist vorzugsweise zwischen 20 und 30 cm quer zur Bearbeitungsrichtung lang.
- Vorteilhafte Ausgestaltungen und Weiterbildungen der Erfindung ergeben sich aus den nachfolgenden abhängigen Ansprüchen. Es ist darauf hinzuweisen, dass die in den Ansprüchen einzeln aufgeführten Merkmale auch in beliebiger und technologisch sinnvoller Weise miteinander kombiniert werden können und somit weitere Ausgestaltungen der Erfindung aufzeigen.
- Gemäß einer vorteilhaften Ausgestaltung der Erfindung ist vorgesehen, dass der Staubsauger mindestens einen Gyroskop-Sensor umfasst, der dazu eingerichtet ist, die Bewegung der Bodendüse über die zu reinigende Bodenfläche zu erfassen. Über den Gyroskop-Sensor kann die Lage und die Bewegung des Staubsaugers mit den Signalen des optischen Sensors abgeglichen werden. Sitzt der Gyroskop-Sensor in der Bodendüse lässt sich die Position der Bodendüse direkt mit den Signalen des optischen Sensors abgleichen. Wird der Gyroskop-Sensor im Handgriff des Staubsaugers angeordnet, so kann die Rotation und Bewegung des Handgriffs auf die resultierende Bewegung der Bodendüse umgerechnet werden. Es können auch ein Gyroskop-Sensor in der Bodendüse und ein Gyroskop-Sensor in dem Handgriff vorgesehen sein. So ist eine umfassende Überwachung der Bewegung der Bodendüse möglich. Anhand der Daten des optischen Sensors oder des zusätzlichen Gyroskop-Sensors kann die Staubsaugerbewegung zuverlässig geschätzt oder gemessen werden.
- Besonders bevorzugt ist eine Ausführungsform, die vorsieht, dass die Steuereinrichtung dazu eingerichtet ist, aus den Daten des optischen Sensors mittels künstlicher Intelligenz diverse Objekte im Erfassungsbereich des optischen Sensors zu erkennen und zu kategorisieren. Die Erkennung und Kategorisierung von Gegenständen im Erfassungsbereich des optischen Sensors unterstützt den Benutzer oder die Benutzerin bei der sicheren Führung des Staubsaugers über die zu reinigende Bodenfläche. Hierbei unterscheidet die künstliche Intelligenz aktiv was Dreck ist und eingesaugt werden soll und welche Objekte nicht eingesaugt werden sollten. Hierzu zählen Kleidungsstücke, Flüssigkeiten, Kabel, scharfe oder spitze Gegenstände oder auch Tiere. Das Risiko für Beschädigungen kann reduziert werden, sofern Gegenstände erkannt werden, die beschädigt werden könnten oder welche die Bodendüse oder den Staubsauger beschädigen könnten. Anhand von künstlicher Intelligenz erfolgt eine Erkennung und der Kategorisierung der Gegenstände, um einen umfassenden Überblick über die Umgebung der Bodendüse und des Staubsaugers zu erhalten. Die künstliche Intelligenz der Steuereinrichtung erhält als Eingangssignal die Daten vom optischen Sensor und klassifiziert erfasste Objekte und erkennt deren Position.
- Eine besonders vorteilhafte Ausführung der Erfindung bezieht sich darauf, dass die Steuereinrichtung dazu eingerichtet ist, die erkannten Objekte in gefährliche und ungefährliche Objekte zu kategorisieren, wobei die Kategorie gefährliche Objekte solche erkannte Objekte umfasst, die über die Bodendüse eingesaugt werden können und zu Beschädigungen am Staubsauger und/oder dem Objekt führen würden. Die Unterscheidung der erkannten Objekte in gefährliche und ungefährliche Objekte mittels der künstlichen Intelligenz schafft die Grundlage für eine besonders zuverlässige Unterstützung des Benutzers oder der Benutzerin beim sicheren Führen des Staubsaugers über die zu reinigende Bodenfläche. Mit einem selbstlernenden Algorithmus, bzw. Modell kann die Steuereinrichtung zuverlässig zwischen gefährlichen und ungefährlichen Objekten unterscheiden und unterstützt den Benutzer oder die Benutzerin dabei einen guten Überblick über die Umgebung um den Staubsauger bzw. die Bodendüse zu behalten.
- Besonders bevorzugt ist eine Ausführungsform, die vorsieht, dass die Steuereinrichtung dazu eingerichtet ist, über die Daten des Sensors oder der Sensoren von der Bodendüse und/oder dem Staubsauger einen Fahrkorridor der Bodendüse abzuschätzen. Mit der Abschätzung des Fahrkorridors der Bodendüse des handgeführten Staubsaugers können Rückschlüsse über mögliche Hindernisse oder Gefahren durch Objekte im möglichen Weg der Bodendüse gezogen werden. So können die zu erkennenden Objekte auf den Fahrkorridor eingegrenzt werden, um die Leistung der künstlichen Intelligenz weiter zu verbessern. Hierbei können Daten des optischen Sensors bei der Abschätzung des möglichen Fahrkorridors der Bodendüse von der Steuereinrichtung berücksichtigt werden. Es können auch Daten mindestens eines Gyroskop-Sensors verwendet werden, um einen Fahrkorridor der Bodendüse besser abzuschätzen. Der Gyroskop-Sensor ist dafür dazu eingerichtet ist, die Bewegung der Bodendüse über die zu reinigende Bodenfläche zu erfassen. Die Kombination der Daten des mindestens einen optischen Sensors mit den Daten des mindestens einen Gyroskop-Sensors bietet die Möglichkeit durch die Steuereinrichtung den Fahrkorridor der Bodendüse besonders zuverlässig abzuschätzen. So können zuverlässig Rückschlüsse über gefährliche Objekte im wahrscheinlichen Fahrkorridor der Bodendüse gezogen werden. So unterstützt der Staubsauger den Benutzer oder die Benutzerin dabei Gefahren im voraussichtlichen Weg der Bodendüse über die zu reinigende Oberfläche zu erkennen. Die Objektpositionen aus der künstlichen Intelligenz plus die Gyroskop-Informationen ergeben vorzugsweise in Kombination die Lage der Objekte relativ zur Bodendüse. Beispielsweise kann ein Kalman-Filter die Lage der Objekte bei der Staubsauger-Bewegung mitführen.
- Eine besonders vorteilhafte Ausführung der Erfindung sieht daher vor, dass der Staubsauger eine Warneinrichtung aufweist, die dazu eingerichtet ist, von der Steuereinrichtung angesteuert zu werden, um ein Warnsignal auszugeben, wenn sich ein gefährliches Objekt im Fahrkorridor der Bodendüse befindet. Über das Warnsignal kann der Benutzer oder die Benutzerin zuverlässig zu gefährlichen Objekten im möglichen Weg der Bodendüse informiert werden, um so bei der sicheren Führung der Bodendüse über die zur reinigende Oberfläche unterstützt zu werden. Das Warnsignal kann über eine Anzeige und/oder über einen Ton von der Warneinrichtung ausgegeben werden. Die Warneinrichtung kann auch ein Vibrieren des Handgriffes als ein Warnsignal ausgeben, wenn sich ein gefährliches Objekt im Fahrkorridor der Bodendüse befindet. Es könnte auch eine über die Hand wahrnehmbare Kraft ausgeübt werden, welche den Benutzer oder die Benutzerin vor einem gefährlichen Objekt im Fahrkorridor der Bodendüse warnt. Solch eine Kraft kann von einem Vibrationssensor am Griff ausgeübt werden, sodass der Benutzer oder die Benutzerin beim Führen des Staubsaugers mit der Hand intuitiv ein Feedback an der Hand erhält und die Bewegung daraufhin anpassen kann.
- Eine vorteilhafte Ausführung der Erfindung sieht vor, dass die Steuereinrichtung dazu eingerichtet ist, den Saugluftstrom an der Bodendüse zu reduzieren, wenn sich ein gefährliches Objekt im Fahrkorridor der Bodendüse befindet. Kann ein Überfahren des gefährlichen Objekts nicht mehr vermieden werden, weil der Benutzer oder die Benutzerin den Fahrkorridor nicht rechtzeitig ändert oder die Bewegung der Bodendüse nicht rechtzeitig stoppen kann, so kann zusätzlich ein Einsaugen des gefährlichen Objekts durch Reduzierung des Saugluftstroms an der Bodendüse verhindert werden. Hierzu könnte die Steuereinrichtung das Gebläse zur Erzeugung des Saugluftstroms abschalten. Es kann aber auch ein Nebenluftventil automatisch geöffnet werden, wodurch der Saugluftstrom an der Bodendüse auch ohne Abschaltung des Gebläses abnimmt. Ein Einsaugen eines gefährlichen Objekts kann vermieden werden, indem zunächst der Benutzer oder die Benutzerin gewarnt wird. Falls dies die Bewegung der Bodendüse auf den gefährlichen Gegenstand nicht verhindert, so kann das Einsaugen durch Herunterfahren der Saugleistung bis zum Abschalten vermieden werden. Der optische Sensor an der Bodendüse in Bodennähe erlaubt zusätzlich eine gute Abschätzung, welche Höhe die erkannten Objekte haben. So muss nur ein Einsaugen vermieden werden, wenn das Objekt tatsächlich auf der Bodenfläche liegt und die Bodendüse darüberfährt. Hängt etwa ein Kabel von einem Schreitisch zu einer Steckdose, so kann mit dem Staubsauger darunter hergefahren werden und eine Vermeidung des Einsaugens ist nicht notwendig.
- Besonders vorteilhaft ist eine Ausführungsform, die vorsieht, dass die Bodendüse eine über einen Bürstenmotor angetriebene Bürste zur Reinigung der Bodenfläche aufweist, wobei die Steuereinrichtung dazu eingerichtet ist, den Bürstenmotor zu stoppen, wenn sich ein gefährliches Objekt im Fahrkorridor der Bodendüse befindet. Kann ein Überfahren des gefährlichen Objekts nicht mehr vermieden werden, weil der Benutzer oder die Benutzerin den Fahrkorridor nicht rechtzeitig ändert oder die Bewegung der Bodendüse nicht stoppen kann, so kann die Steuereinrichtung den Bürstenmotor stoppen, um weitere Beschädigungen am Staubsauger oder dem Objekt zu verhindern.
- Eine vorteilhafte Ausgestaltung der Erfindung sieht vor, dass die Steuereinrichtung dazu eingerichtet ist, aus den Daten des optischen Sensors sich auf die Bodendüse zu bewegende Objekte im Erfassungsbereich des optischen Sensors zu erkennen. Der Benutzer oder die Benutzerin kann so bei der sicheren Bewegung der Bodendüse über die zu reinigende Bodenfläche unterstützt und das Risiko bewegliche Objekte einzusaugen, kann reduziert werden. Dadurch kann der Benutzer oder die Benutzerin beim sicheren Führen des Staubsaugers per Hand entlang beweglicher Objekte unterstützt werden. Wird ein bewegliches Objekt nämlich eingesaugt, so bewegt es sich naturgemäß auf die Bodendüse zu. Ein Beispiel hierfür ist ein Vorhang, der in der Umgebung der Bodendüse an den Staubsauger herangezogen wird. Diese Bewegungsinformation kann aus dem Video-Stream einer Kamera als optischen Sensor herausgerechnet werden, so dass in dem Bild alle Objekte mit ihrer Bewegung sichtbar werden, die nicht fest auf der Bodenfläche liegen.
- Gemäß einer vorteilhaften Ausgestaltung der Erfindung ist vorgesehen, dass die Steuereinrichtung dazu eingerichtet ist, eine Warneinrichtung des Staubsaugers anzusteuern, um ein Warnsignal auszugeben, wenn sich ein Objekt im Erfassungsbereich des optischen Sensors auf die Bodendüse zu bewegt. So kann der Benutzer oder die Benutzerin rechtzeitig gewarnt werden, bevor bewegliche Objekte ungewollt an der Bodendüse eingesaugt werden.
- Eine besonders vorteilhafte Ausführung der Erfindung sieht daher vor, dass die Steuereinrichtung dazu eingerichtet ist, den Saugluftstrom an der Bodendüse zu reduzieren, wenn sich ein Objekt im Erfassungsbereich des optischen Sensors auf die Bodendüse zu bewegt. Hierdurch wird das ungewollte Einsaugen von beweglichen Gegenständen zusätzlich vermieden.
- Gemäß einer vorteilhaften Ausgestaltung der Erfindung ist vorgesehen, dass die Bodendüse eine über einen Bürstenmotor angetriebene Bürste zur Reinigung der Bodenfläche aufweist, wobei die Steuereinrichtung dazu eingerichtet ist, den Bürstenmotor zu stoppen, wenn sich ein Objekt im Erfassungsbereich des optischen Sensors auf die Bodendüse zu bewegt. So wird das ungewollte Aufwickeln von beweglichen Gegenständen verhindert.
- Weitere Merkmale, Einzelheiten und Vorteile der Erfindung ergeben sich aufgrund der nachfolgenden Beschreibung sowie anhand der Zeichnungen. Ein Ausführungsbeispiel der Erfindung ist in den folgenden Zeichnungen rein schematisch dargestellt und wird nachfolgend näher beschrieben. Einander entsprechende Gegenstände oder Elemente sind in allen Figuren mit den gleichen Bezugszeichen versehen. Es zeigt
- Figur 1
- Erfindungsgemäßer Staubsauger und
- Figur 2
- Kamerabild und Bodendüse.
- In der
Figur 1 mit dem Bezugszeichen 1 bezeichnet ist ein Staubsauger 1 mit einer Bodendüse 4 als Saugdüse rein schematisch dargestellt. Die Darstellung gemäßFigur 1 zeigt einen erfindungsgemäßen Staubsauger 1 mit einer an den Staubsauger 1 angeschlossenen Bodendüse 4. Bei dem im Ausführungsbeispiel dargestellten Staubsauger 1 handelt es sich um einen sogenannten Akkustick-Staubsauger 1. Die Bodendüse 4 ist hier über ihren Anschlussstutzen 12 mit einem vorzugsweise teleskopierbar ausgestalteten Saugrohr 13 verbunden. Über einen Akkumulator wird ein in dem Staubsaugergehäuse integriertes (nicht gezeigtes) Gebläse des Staubsaugers 1 mit Strom betrieben, um einen Unterdruck zu erzeugen. Mittels dieses Unterdruckes werden Schmutz und Dreck von der zu reinigenden Bodenfläche 2 durch einen Luftstrom über den Saugmund der Bodendüse 4 aufgenommen und über das Saugrohr 13 in das Gehäuse des Staubsaugers 1 abtransportiert. In diesem Gehäuse ist ein Abscheidesystem vorgesehen. Für den Betrieb des Staubsaugers 1 wird ein Unterdruck erzeugt, wobei der durch den Unterdruck erzeugte Luftstrom in dem Abscheidesystem von Schmutz und Dreck befreit und über eine Abluftöffnung aus dem Staubsauger 1 herausgeleitet wird. Zum Ein- und Ausschalten des Staubsaugers 1 weist dieser eine Benutzerschnittstelle an dem Handgriff 3 auf, mit der Funktionen des Staubsaugers 1 aktiviert werden können. Außerdem kann der Staubsauger 1 über die Handschaltung ein- und ausgeschaltet werden und es können Leistungsstufen des (nicht gezeigten) Gebläses ausgewählt werden. Ein Benutzer des Staubsaugers 1 kann diesen an dem Handgriff 3 ergreifen und so die Bodendüse 4 in Schub- und Zugbewegungen in Bearbeitungsrichtung 5 vor- und zurückschieben, um die Bodenfläche 2 zu reinigen. Hierbei gleitet die Bodendüse 4 über die zu reinigende Bodenfläche 2. Besonders bei langflorigen Teppichen gleitet die Unterseite der Bodendüse 4 über die Bodenfläche 2, während die Unterseite bei Hartböden beabstandet, gegebenenfalls durch Abstandsborsten, über diese Bodenflächen 2 hinweg schwebt. Die Bodendüse 4 des Staubsaugers 1 verfügt über einen optischen Sensor 6, welcher dazu eingerichtet ist, einen Erfassungsbereich 7 in Bearbeitungsrichtung 5 vor der Bodendüse 4 zu erfassen. Die Bodendüse 4 kann auch einen optischen Sensor 6 aufweisen mit einem Erfassungsbereich 7 in Bearbeitungsrichtung 5 hinter der Bodendüse 4. Zusätzlich kann ein (nicht gezeigter) Gyroskop-Sensor am Staubsauger 1 vorgesehen sein, der die Bewegung der Bodendüse 4 über die zu reinigende Bodenfläche 2 erfasst. Die (nicht gezeigte) Steuereinrichtung des Staubsaugers 1 kann mittels künstlicher Intelligenz aus den Daten des optischen Sensors 6 diverse Objekte 8, 9 auf der Bodenfläche 2 im Erfassungsbereich des Sensors 6 erkennen und kategorisieren. Die erkannten Objekte 8, 9 werden von der Steuereinrichtung des Staubsaugers 1 in gefährliche und ungefährliche Objekte kategorisiert. Als gefährliche Objekte 9 werden solche Objekte identifiziert, die über die Bodendüse 4 eingesaugt werden können und zu Beschädigungen am Staubsauger 1 und/oder dem Objekt 9 führen würden. Vorteilhafterweise kann die Steuereinrichtung über die Daten des optischen Sensors 6 und des Gyroskop-Sensor einen möglichen Fahrkorridor 10 der Bodendüse 4 abschätzen, in welchem der Benutzer oder die Benutzerin den Staubsauger aller Wahrscheinlichkeit nach bewegen wird. Danach kann eine (nicht gezeigte) Warneinrichtung des Staubsaugers 1 angesteuert werden, wenn sich ein gefährliches Objekt 9 im Fahrkorridor 10 der Bodendüse 4 befindet, um ein Warnsignal auszugeben. Dieses Warnsignal kann akustisch, optisch oder haptisch vom Benutzer oder von der Benutzerin bemerkt werden. Es kann von der Steuereinrichtung auch der Saugluftstrom an der Bodendüse 4 reduziert werden, wenn sich ein gefährliches Objekt 9 im Fahrkorridor 10 der Bodendüse 4 befindet. So kann ein Einsaugen verhindert werden, wenn der Benutzer oder die Benutzerin nicht bereits auf das Warnsignal reagiert und den Fahrkorridor 10 am Handgriff 3 ändert oder die Bewegung der Bodendüse 4 auf das gefährliche Objekt 9 zu stoppt. Wenn die Bodendüse 4 eine über einen (nicht gezeigten) Bürstenmotor angetriebene (nicht gezeigte) Bürste zur Reinigung der Bodenfläche 2 aufweist, kann die Steuereinrichtung auch den Bürstenmotor und damit die Bürste stoppen, wenn sich ein gefährliches Objekt 9 im Fahrkorridor 10 unmittelbar vor der Bodendüse 4 befindet. - Die
Figur 2 zeigt schematisch das Kamerabild einer Kamera als optischer Sensor 6 (Fig. 1 ) für den Staubsauger gemäßFigur 1 . Auch zu erkennen ist die Bodendüse 4 des Staubsaugers 1. In dem Kamerabild ist die zu reinigende Bodenfläche 2 zu erkennen, die sich aufgrund der Bewegung der Bodendüse 4 in Bearbeitungsrichtung 5 samt der darauf befindlichen Objekte 8 im Kamerabild entgegengesetzt bewegt. Ein bewegliches Objekt 11 bewegt sich auf der Bodenfläche 2 auf die Bodendüse 4 zu, was mit dem größeren Geschwindigkeitsvektor angedeutet ist. Die Steuereinrichtung kann aus dem Kamerabild sich auf die Bodendüse 4 zu bewegende Objekte 11 im Erfassungsbereich 7 (Fig. 1 ) der Kamera 6 (Fig. 1 ) erkennen. Wenn sich ein Objekt 11 im Erfassungsbereich 7 (Fig. 1 ) des optischen Sensors 6 (Fig. 1 ) schneller als die Umgebung auf die Bodendüse 4 zu bewegt, kann die Steuereinrichtung über eine Warneinrichtung des Staubsaugers 1 ein Warnsignal an den Benutzer oder die Benutzerin des Staubsaugers 1 erzeugen. So wird das ungewollte Einsaugen von beweglichen Gegenständen 11 verhindert. Sollte sich die Bodendüse 4 weiter auf das bewegliche Objekt 11 zu bewegen, kann die Steuereinrichtung, hierzu auch den Saugluftstrom an der Bodendüse 4 reduzieren. Wenn die Bodendüse 4 eine über einen (nicht gezeigten) Bürstenmotor angetriebene (nicht gezeigte) Bürste zur Reinigung der Bodenfläche 2 aufweist, kann die Steuereinrichtung auch den Bürstenmotor stoppen, wenn sich ein bewegliches Objekt 11 im Erfassungsbereich 7 des optischen Sensors 6 auf die Bodendüse 4 zu bewegt. So kann verhindert werden, dass sich das bewegliche Objekt ungewollt in der Bürste verfängt. - Natürlich ist die Erfindung nicht auf das dargestellte Ausführungsbeispiel beschränkt. Weitere Ausgestaltungen sind möglich, ohne den Grundgedanken zu verlassen.
-
- 1
- Staubsauger
- 2
- Bodenfläche
- 3
- Handgriff
- 4
- Bodendüse
- 5
- Bearbeitungsrichtung
- 6
- Optischer Sensor
- 7
- Erfassungsbereich
- 8
- Ungefährliche Objekte
- 9
- Gefährliches Objekt
- 10
- Fahrkorridor
- 11
- Bewegliche Objekte
- 12
- Anschlussstutzen
- 13
- Saugrohr
Claims (12)
- Staubsauger (1) zur Reinigung und Pflege von Bodenflächen (2) mit einem Handgriff (3) zum Führen des Staubsaugers (1) bei der Reinigung und Pflege der Bodenflächen (2), einer Bodendüse (4) zur Bewegung über die zu reinigende Bodenfläche (2) in einer Bearbeitungsrichtung (5) vor und zurück, einem Gebläse zur Erzeugung eines Unterdruckes zur Aufnahme von Schmutz mittels eines Saugluftstromes über die Bodendüse (4), einem Abscheidesystem zur Reinigung der aufgenommenen Luft vom Schmutz, und einer Steuereinrichtung,
dadurch gekennzeichnet,
dass die Bodendüse (4) mindestens einen optischen Sensor (6) aufweist, welcher dazu eingerichtet ist, einen Erfassungsbereich (7) in Bearbeitungsrichtung (5) vor und/oder hinter der Bodendüse (4) zu erfassen. - Staubsauger (1) nach Anspruch 1, dadurch gekennzeichnet, dass der Staubsauger (1) mindestens einen Gyroskop-Sensor umfasst, der dazu eingerichtet ist, die Bewegung der Bodendüse (4) über die zu reinigende Bodenfläche (2) zu erfassen.
- Staubsauger (1) nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die Steuereinrichtung dazu eingerichtet ist, aus den Daten des optischen Sensors (6) mittels künstlicher Intelligenz diverse Objekte (8, 9) im Erfassungsbereich (7) des optischen Sensors (6) zu erkennen und zu kategorisieren.
- Staubsauger (1) nach Anspruch 3, dadurch gekennzeichnet, dass die Steuereinrichtung dazu eingerichtet ist, die erkannten Objekte (8, 9) in gefährliche und ungefährliche Objekte zu kategorisieren, wobei die Kategorie gefährliche Objekte (9) solche erkannte Objekte umfasst, die über die Bodendüse (4) eingesaugt werden können und zu Beschädigungen am Staubsauger (1) und/oder dem Objekt (9) führen würden.
- Staubsauger (1) nach einem Anspruch 3 oder 4, dadurch gekennzeichnet, dass die Steuereinrichtung dazu eingerichtet ist, über die Daten des Sensors (6) oder der Sensoren (6) von der Bodendüse (4) und/oder dem Staubsauger (1) einen Fahrkorridor (10) der Bodendüse (4) abzuschätzen.
- Staubsauger (1) nach Anspruch 5, dadurch gekennzeichnet, dass der Staubsauger (1) eine Warneinrichtung aufweist, die dazu eingerichtet ist, von der Steuereinrichtung angesteuert zu werden, um ein Warnsignal auszugeben, wenn sich ein gefährliches Objekt (9) im Fahrkorridor (10) der Bodendüse (4) befindet.
- Staubsauger (1) nach Anspruch 5 oder 6, dadurch gekennzeichnet, dass die Steuereinrichtung dazu eingerichtet ist, den Saugluftstrom an der Bodendüse (4) zu reduzieren, wenn sich ein gefährliches Objekt (9) im Fahrkorridor (10) der Bodendüse (4) befindet.
- Staubsauger (1) nach einem der Ansprüche 5 bis 7, dadurch gekennzeichnet, dass die Bodendüse (4) eine über einen Bürstenmotor angetriebene Bürste zur Reinigung der Bodenfläche (2) aufweist, wobei die Steuereinrichtung dazu eingerichtet ist, den Bürstenmotor zu stoppen, wenn sich ein gefährliches Objekt (9) im Fahrkorridor (10) der Bodendüse (4) befindet.
- Staubsauger (1) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Steuereinrichtung dazu eingerichtet ist, aus den Daten des optischen Sensors (6) sich auf die Bodendüse (4) zu bewegende Objekte (11) im Erfassungsbereich (7) des optischen Sensors (6) zu erkennen.
- Staubsauger (1) nach Anspruch 9, dadurch gekennzeichnet, dass die Steuereinrichtung dazu eingerichtet ist, eine Warneinrichtung des Staubsaugers (1) anzusteuern, um ein Warnsignal auszugeben, wenn sich ein Objekt (11) im Erfassungsbereich (7) des optischen Sensors (6) auf die Bodendüse (4) zu bewegt.
- Staubsauger (1) nach Anspruch 9 oder 10, dadurch gekennzeichnet, dass die Steuereinrichtung dazu eingerichtet ist, den Saugluftstrom an der Bodendüse (4) zu reduzieren, wenn sich ein Objekt (11) im Erfassungsbereich (7) des optischen Sensors (6) auf die Bodendüse (4) zu bewegt.
- Staubsauger (1) nach einem der vorhergehenden Ansprüche 9 bis 11, dadurch gekennzeichnet, dass die Bodendüse (4) eine über einen Bürstenmotor angetriebene Bürste zur Reinigung der Bodenfläche (2) aufweist, wobei die Steuereinrichtung dazu eingerichtet ist, den Bürstenmotor zu stoppen, wenn sich ein Objekt (11) im Erfassungsbereich (7) des optischen Sensors (6) auf die Bodendüse (4) zu bewegt.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102023132952.9A DE102023132952A1 (de) | 2023-11-27 | 2023-11-27 | Staubsauger |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4563055A1 true EP4563055A1 (de) | 2025-06-04 |
Family
ID=93376066
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP24210174.9A Pending EP4563055A1 (de) | 2023-11-27 | 2024-10-31 | Staubsauger |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP4563055A1 (de) |
| DE (1) | DE102023132952A1 (de) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016115392A1 (de) * | 2016-08-19 | 2018-02-22 | Miele & Cie. Kg | Bodendüse für Staubsauger und Staubsauger |
| EP3466310A1 (de) * | 2017-10-03 | 2019-04-10 | Black & Decker Inc. | Näherungsdetektor |
| CN107708512B (zh) * | 2015-06-19 | 2021-04-06 | 德国福维克控股公司 | 用于吸尘器的吸嘴 |
-
2023
- 2023-11-27 DE DE102023132952.9A patent/DE102023132952A1/de active Pending
-
2024
- 2024-10-31 EP EP24210174.9A patent/EP4563055A1/de active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107708512B (zh) * | 2015-06-19 | 2021-04-06 | 德国福维克控股公司 | 用于吸尘器的吸嘴 |
| DE102016115392A1 (de) * | 2016-08-19 | 2018-02-22 | Miele & Cie. Kg | Bodendüse für Staubsauger und Staubsauger |
| EP3466310A1 (de) * | 2017-10-03 | 2019-04-10 | Black & Decker Inc. | Näherungsdetektor |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102023132952A1 (de) | 2025-05-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3569124B1 (de) | Reinigungsgerät | |
| DE69821659T2 (de) | Reinigungsroboter | |
| DE112014000174T5 (de) | Rollenbürste für Oberflächenreinigungsroboter | |
| EP3310233B1 (de) | Saugdüse für einen staubsauger | |
| WO2007074035A1 (de) | Bodendüse für einen staubsauger mit aktiv anhebbarem oder absenkbarem begrenzungsmittel und verfahren | |
| EP3409168B1 (de) | Eckenreinigungsmodul für modular aufgebaute reinigungsroboter | |
| EP3683645A1 (de) | System mit einem ersten bodenbearbeitungsgerät und einem zweiten bodenbearbeitungsgerät sowie verfahren zum betrieb eines solchen systems | |
| EP4563055A1 (de) | Staubsauger | |
| DE102017112741A1 (de) | Staubsauger mit Objekterkennung und Verfahren zum Betreiben eines Staubsaugers | |
| EP4197414A1 (de) | Saugroboter | |
| DE102018132964A1 (de) | Autonome reinigungsvorrichtung mit einem saugarm | |
| EP3586709B1 (de) | Bodendüse für staubsauger und staubsauger | |
| WO2023001390A1 (de) | Bodenreinigungsgerät und verfahren zum steuern eines bodenreinigungsgerätes | |
| EP4098166B1 (de) | Bodendüse für staubsauger, staubsauger, bürstenwalzenset und verfahren zum betreiben eines staubsaugers | |
| EP3446610B1 (de) | Staubsauger und verfahren zum betrieb eines staubsaugers | |
| EP3479751B1 (de) | Ladevorrichtung für haushaltsgerät und haushaltsgerät | |
| EP4212082A1 (de) | Staubsauger, vorzugsweise handstaubsauger | |
| DE102017119108A1 (de) | Staubsauger und Verfahren zum Betrieb eines Staubsaugers | |
| EP4702910A1 (de) | Verfahren zum detektieren und beheben einer verstopfung | |
| EP3944801B1 (de) | Selbstfahrendes bodenreinigungsgerät | |
| DE102019133721B4 (de) | Vorsatzgerät für ein Reinigungsgerät und Reinigungsgerät mit Feuchteerkennung | |
| DE102019130910A1 (de) | Staubsauger und Verfahren zum Betrieb eines Staubsaugers | |
| DE102019104429A1 (de) | Bodenpflegegerät und Verfahren zum Betrieb eines Bodenpflegegeräts | |
| DE102019210971A1 (de) | Fahrbarer Reinigungsroboter | |
| BE1029184B1 (de) | Verfahren zum Betrieb eines Akkustaubsaugers |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20251204 |