EP4564106A1 - Système réglant pour une pièce d'horlogerie - Google Patents
Système réglant pour une pièce d'horlogerie Download PDFInfo
- Publication number
- EP4564106A1 EP4564106A1 EP23213488.2A EP23213488A EP4564106A1 EP 4564106 A1 EP4564106 A1 EP 4564106A1 EP 23213488 A EP23213488 A EP 23213488A EP 4564106 A1 EP4564106 A1 EP 4564106A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- frequency
- oscillator
- movement
- control system
- mechanical oscillator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/08—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a mechanical oscillator other than a pendulum or balance, e.g. by a tuning fork, e.g. electrostatically
- G04C3/10—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a mechanical oscillator other than a pendulum or balance, e.g. by a tuning fork, e.g. electrostatically driven by electromagnetic means
- G04C3/108—Driving circuits
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B18/00—Mechanisms for setting frequency
- G04B18/08—Component parts or constructional details
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C10/00—Arrangements of electric power supplies in time-pieces
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B18/00—Mechanisms for setting frequency
- G04B18/02—Regulator or adjustment devices; Indexing devices, e.g. raquettes
- G04B18/021—Regulator or adjustment devices; Indexing devices, e.g. raquettes adjusting the indexing device from the outside
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B18/00—Mechanisms for setting frequency
- G04B18/02—Regulator or adjustment devices; Indexing devices, e.g. raquettes
- G04B18/025—Fixing of the indexing device
-
- G—PHYSICS
- G04—HOROLOGY
- G04B—MECHANICALLY-DRIVEN CLOCKS OR WATCHES; MECHANICAL PARTS OF CLOCKS OR WATCHES IN GENERAL; TIME PIECES USING THE POSITION OF THE SUN, MOON OR STARS
- G04B18/00—Mechanisms for setting frequency
- G04B18/02—Regulator or adjustment devices; Indexing devices, e.g. raquettes
- G04B18/028—Setting the regulator by means coupled to or depending on another device, e.g. by the time indication setting mechanism
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C11/00—Synchronisation of independently-driven clocks
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C11/00—Synchronisation of independently-driven clocks
- G04C11/08—Synchronisation of independently-driven clocks using an electro-magnet or-motor for oscillation correction
- G04C11/085—Synchronisation of independently-driven clocks using an electro-magnet or-motor for oscillation correction using an electro-motor
- G04C11/088—Synchronisation of independently-driven clocks using an electro-magnet or-motor for oscillation correction using an electro-motor acting on the balance
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/04—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a balance
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/04—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a balance
- G04C3/047—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a balance using other coupling means, e.g. electrostrictive, magnetostrictive
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/08—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a mechanical oscillator other than a pendulum or balance, e.g. by a tuning fork, e.g. electrostatically
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/08—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a mechanical oscillator other than a pendulum or balance, e.g. by a tuning fork, e.g. electrostatically
- G04C3/10—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a mechanical oscillator other than a pendulum or balance, e.g. by a tuning fork, e.g. electrostatically driven by electromagnetic means
- G04C3/101—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a mechanical oscillator other than a pendulum or balance, e.g. by a tuning fork, e.g. electrostatically driven by electromagnetic means constructional details
- G04C3/102—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means wherein movement is regulated by a mechanical oscillator other than a pendulum or balance, e.g. by a tuning fork, e.g. electrostatically driven by electromagnetic means constructional details of the mechanical oscillator or of the coil
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/14—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means incorporating a stepping motor
- G04C3/146—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means incorporating a stepping motor incorporating two or more stepping motors or rotors
-
- G—PHYSICS
- G04—HOROLOGY
- G04D—APPARATUS OR TOOLS SPECIALLY DESIGNED FOR MAKING OR MAINTAINING CLOCKS OR WATCHES
- G04D7/00—Measuring, counting, calibrating, testing or regulating apparatus
- G04D7/004—Optical measuring and testing apparatus
-
- G—PHYSICS
- G04—HOROLOGY
- G04D—APPARATUS OR TOOLS SPECIALLY DESIGNED FOR MAKING OR MAINTAINING CLOCKS OR WATCHES
- G04D7/00—Measuring, counting, calibrating, testing or regulating apparatus
- G04D7/12—Timing devices for clocks or watches for comparing the rate of the oscillating member with a standard
- G04D7/1207—Timing devices for clocks or watches for comparing the rate of the oscillating member with a standard only for measuring
- G04D7/1214—Timing devices for clocks or watches for comparing the rate of the oscillating member with a standard only for measuring for complete clockworks
-
- G—PHYSICS
- G04—HOROLOGY
- G04D—APPARATUS OR TOOLS SPECIALLY DESIGNED FOR MAKING OR MAINTAINING CLOCKS OR WATCHES
- G04D7/00—Measuring, counting, calibrating, testing or regulating apparatus
- G04D7/12—Timing devices for clocks or watches for comparing the rate of the oscillating member with a standard
- G04D7/1257—Timing devices for clocks or watches for comparing the rate of the oscillating member with a standard wherein further adjustment devices are present
- G04D7/1264—Timing devices for clocks or watches for comparing the rate of the oscillating member with a standard wherein further adjustment devices are present for complete clockworks
Definitions
- the invention relates to a regulating system for a timepiece.
- the invention also relates to a watch movement comprising such a regulating system.
- the invention further relates to a timepiece comprising such a watch movement or such a regulating system.
- the invention finally relates to a method for operating such a regulating system.
- rate we mean the expression of a difference, per unit of time, between two states of a timepiece, separated by a given time interval, a “state” can be defined as a difference, at a precise instant, between the time indicated by the timepiece and the time indicated by a reference clock.
- the request EP1158373 discloses a balance-spring type oscillator, the outer end of the hairspring of which can be actuated by a motor so as to modify the active length of the hairspring in order to slow down or speed up the oscillator.
- This document describes an error detection system arranged at the escapement anchor (in particular by means of a piezoelectric spark plug), which will compare the effective frequency of the escapement and that of a third time base.
- the motor associated with an error adjustment system will rotate in a first direction or a second direction in order to shorten or extend the active length of the hairspring.
- the intervention on the hairspring can be carried out every hour or once a day.
- the request EP1164441 describes a concept equivalent to that known from the application EP1158373 , but with a very different implementation.
- the error detection system is located here in the finishing gear and more specifically comprises a contactor placed on a center wheel making one revolution in one hour, on which a minute hand is mounted. Thus, error detection can be done every hour.
- the electromechanical device is only capable of correcting an advance in the rate of the movement. To do this, the device blocks the escape wheel for a time interval corresponding to said advance.
- the second embodiment has the advantage of allowing correction of an advance or a delay in the running of the timepiece, as is the case within the known movement of the application. EP1158373 .
- the second embodiment comprises a device for acting on the active length of the hairspring by means of a piezoelectric element arranged at the outer end of the hairspring. This can be actuated in a first direction or a second direction in order to shorten or lengthen the active length of the hairspring.
- the active length of the hairspring can be selected from several predetermined lengths by the wearer of the watch.
- the aim of the invention is to improve known regulating systems.
- the invention provides a simple, reliable regulating system that can improve the precision of watch movements.
- a regulating system is defined by claim 1.
- Embodiments of the regulating system are defined by claims 2 to 8.
- a watch movement is defined by claim 9.
- a timepiece is defined by claim 10.
- an operating method is defined by claim 11.
- Embodiments of the method of operation are defined by claims 12 to 16.
- a particular embodiment of a timepiece 3000 is described below in detail with reference to figures 1 to 12 .
- the timepiece 3000 is for example a watch, in particular a wristwatch.
- the timepiece 3000 comprises a watch movement 2000 intended to be mounted in a timepiece case or box in order to protect it from the external environment.
- the 2000 watch movement is a mechanical movement, notably an automatic movement, or a hybrid movement.
- the first oscillator 100 makes it possible to regulate, in particular via the escapement system 83, the driving of the finishing gear train 82, which is actuated under the effect of the motor system 81.
- this first oscillator 100 makes it possible to regulate the driving of a wheel set 821 on which a display element 71 is mounted, such as a hand 71 of a display device 700 of the timepiece 3000.
- the wheel set 821 is for example a seconds wheel set 821 on which a seconds hand 71 is mounted.
- the 2000 watch movement includes a 1000 regulating system.
- predetermined frequency we mean here a frequency determined in advance, which is centered on a value f1 or f2 or f3.
- these predetermined frequencies f1, f2, f3 can each vary over a given range, the amplitude of which is a function of the tolerances of the system.
- the frequency f1 is likely to vary over a more restricted range, or even much more restricted than those associated with the frequencies f2, f3, so as to define a nominal frequency f1 of the first oscillator.
- the first oscillator 100 comprises an oscillating mass 41 of an inertial element 4, in particular a balance wheel, and a first elastic return element 1, in particular a balance spring.
- the first oscillator 100 also comprises a second elastic return element forming part of a support 2 of the first elastic return element 1.
- the second connecting member 23 is fixed to a rigid frame 20 by means of elastic blades 21, 22, each provided with flexible portions at their respective ends.
- the second elastic return element takes the form of the second connecting member 23 articulated on the body 20 by means of the elastic blades 21, 22.
- a third elastic return element 3 takes the form of a single elastic blade 31, here rectilinear, which is integral with the second connecting member 23, and which is for example arranged between the elastic blades 21, 22 on the outer periphery of the second connecting member 23.
- the elements 20, 21, 22, 23 of the support 2 and the blade 31 of the third elastic return element 3 form a monolithic structure 900 of the regulating system 1000, which is integral with a frame 6 of the timepiece 3000, in particular of the movement 2000.
- predetermined stiffness we mean here a stiffness determined in advance, which is centered on a value k1 or k2 or k3.
- these predetermined stiffnesses k1, k2, k3 can each vary over a given range, the amplitude of which is a function of the tolerances of the system.
- the stiffness k1 is likely to vary over a more restricted range, or even much more restricted than those associated with the stiffnesses k2, k3, so as to induce a nominal frequency f1 of the first oscillator.
- a stiffness ksr2 of the elastic return system 10 makes it possible to correct a possible delay of the display device of the timepiece or makes it possible to correct a possible delay of a mobile controlling a possible display device of the timepiece
- a stiffness ksr3 of the elastic return system 10 makes it possible to correct a possible advance of the display device of the timepiece or makes it possible to correct a possible advance of a mobile controlling a possible display device of the timepiece, as will be described below.
- the stiffness selection device 300 of the elastic return system 10 acts specifically on the stiffness of the third elastic return element 3, more particularly on the stiffness of the elastic blade 31.
- the stiffness selection device 300 makes it possible to select a determined stiffness of the third elastic return element 3 from 3 predetermined stiffnesses k31, k32, k33, the stiffnesses ksr1, ksr2, ksr3 of the elastic return system 10 being correlated respectively with the stiffnesses k31, k32, k33.
- a stiffness k31 of the elastic blade 31 makes it possible to define a nominal frequency f1 of the first oscillator 100
- a stiffness k32 of the elastic blade 31 makes it possible to correct a possible delay of the display device of the timepiece or a possible delay of a mobile controlling a possible display device of the timepiece
- a stiffness k33 of the elastic blade 31 makes it possible to correct a possible advance of the display device of the timepiece or a possible advance of a mobile controlling a possible display device of the timepiece, as will be described below.
- a rotation period P of the seconds wheel 821 is a function of the frequency of the first oscillator 100, so that the stiffness selection device 300 makes it possible to define said period P of the wheel 821.
- the stiffness selection device 300 here takes the form of a device for modifying the active length of the elastic blade 31 as illustrated in the Figure 4 .
- the device 300 comprises a pair of clamps 301, 302 gripping the elastic blade. 31 and capable of moving in the longitudinal direction of said blade 31 so as to reach three predefined stable positions Pos1, Pos2, Pos3 making it possible to define the stiffnesses k31, k32, k33 respectively.
- the selection device 300 may comprise a pair of clamps 301, 302 determining an active length, in particular three active lengths, of the elastic return system 10.
- the clamps 301, 302 are each mounted on the monolithic structure 900, in particular on a frame 304 of the monolithic structure 900, by means of elastic blades, and are returned against the elastic blade 31 under the effect of a tenon 303 which makes it possible to act against the elastic blades by urging the clamps 301, 302 substantially to pivot about their respective axis of rotation A301, A302.
- the clamps 301, 302 are provided to clamp the blade elastic 31 with sufficient force to avoid any mechanical play during oscillations of the oscillator. This force must however be determined so as to allow the movement of the clamps 301, 302 to move from one stable position to another stable position. Typically, this force can be between 0.1 mN and 10 mN depending on the dimensions of the regulating system.
- the clamps 301, 302 are capable of being held in one or other of the positions Pos1, Pos2, Pos3 thanks to the toothed structure 305 provided for positioning the selection beak 306 connected to the frame 304 by means of a flexible structure.
- the toothed structure 305 comprises 3 tooth hollows within which the beak 306 is capable of coming to position itself under the effect of the tenon 307 which makes it possible to constrain the flexible structure connecting the beak 306 to the frame 304 so as to maintain said beak 306 in contact with the toothed structure 305.
- the Figure 5 represents the selection device 300 in black. This is part of the monolithic structure 900 intended to be attached to the frame 6 of the movement 2000, in particular to a roughing-out.
- This selection device 300 is actuated periodically by the actuating device 500.
- this actuating device 500 makes it possible to position the pair of clamps 301, 302 according to one of the three stable positions Pos1, Pos2, Pos3 by moving, or not, the selection beak 306 opposite the toothed structure 305.
- the actuating device 500 is in the form of an electromechanical device comprising an electrical energy source 501 and an electromechanical actuator 502.
- the electrical energy source 501 makes it possible to deliver an electrical voltage, positive or negative, to the electromechanical actuator 502 and thus makes it possible to act on the frame 304 by means of an arm 503 articulated by a flexible guide, in particular by pivoting around a virtual axis of rotation A503.
- This arm 503 is respectively connected to the actuator 502 and to the frame 304 by multiple elastic structures.
- the arm 503 is also included within the monolithic structure 900, and the actuator 502 is intended to be arranged within a housing 504 of this same monolithic structure.
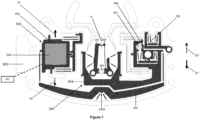
- Figure 7 represents a view of the elements of the actuation device 500 formed on the structure 900. These are represented in black, like those of the selection device 300.
- the actuator 502 is represented by hatching.
- the actuator 502 is designed to be actuated in a direction parallel or substantially parallel to the longitudinal direction of the blade 31, in a first or second direction depending on the sign of the electrical voltage delivered by the electrical energy source 501.
- this voltage is delivered only punctually and periodically so as to exclusively move the selection beak 306 with respect to the toothed structure 305, the beak being held in position against the structure 305 under the effect of the tenon 307 and under the effect of the various elastic structures which make it possible to ensure that the beak 306 remains hooked between two teeth of the toothed structure 305.
- the different positions are advantageously mechanically stable. Such a design therefore makes it possible to minimize the consumption of electrical energy supplied by the electrical energy source 501 used to power the actuation device 500, but also a possible comparison device 400 which will be described below.
- the actuator 502 actuates the pair of clamps 301, 302 exclusively when the pair of clamps 301, 302 is in position Pos1 ( Figure 6a ), as described below.
- the beak 306 is located between two teeth arranged in the center of the toothed structure 305.
- the actuator 502 operates in a first direction illustrated by a solid arrow S1 of the Figure 7
- the beak is driven in a second direction illustrated by a solid arrow S1', opposite to the first direction, due to the location of the articulation axis A503 of the arm 503.
- Such an action thus induces the movement of the beak 306 so that the pair of clamps 301, 302 can be positioned in position Pos3 ( Figure 6c ).
- the sign of the voltage supplied by the electrical energy source 501, and therefore the direction of movement S1, S2 (or S1', S2') of the actuator 502 or the nozzle 306, is a function of a value VD which results from a comparison device 400.
- the comparison device 400 may be at least partially electronic. This device makes it possible to establish at least one difference value VD between the rotation period P of the mobile 821 and a rotation reference period Pref of said mobile 821 given by a counting device 200.
- the counting device 200 comprises a second oscillator 210 having a frequency F1 significantly higher than the frequency f1 of the first oscillator 100.
- thermo-compensated oscillator having a frequency of the order of several tens or hundreds of kHz or MHz and having excellent stability, which thus makes it possible to define a rotation reference period Pref which can be considered as the period that the mobile 821 should ideally have in all circumstances.
- the electrical energy source 501 does not deliver any electrical voltage, so that the actuator 502 does not actuate the pair of clamps 301, 302.
- the pair of clamps 301, 302 remains held in position Pos1 ( Figure 6a ).
- x is a real number, a a negative real number, and b a positive real number.
- the electrical energy source 501 delivers an electrical current with a voltage of a first sign, so that the actuator 501 actuates in a first direction so as to move the pair of clamps 301, 302 into the position Pos2, which allows the movement to correct a delay displayed by the display element 71.
- the electrical energy source 501 delivers an electrical current with a voltage of a second sign, opposite to the first sign, so that the actuator 501 actuates in a second direction, opposite to the first direction, so as to move the pair of clamps 301, 302 into the position Pos3, which allows the movement to correct an advance displayed by the display element 71.
- the comparison device 400 is arranged so as to compare a rotation period P of the mobile 821 of the finishing gear 82 and a reference rotation period Pref of said mobile 821.
- figure 8 represents a flowchart summarizing these different scenarios.
- the comparison device 400 comprises a lever 404 and a wheel set 401 kinematically connected to the wheel set 821 of the finishing gear train 82 of the movement 2000.
- the gear ratio here is 1, so that this wheel set 401 also has a rotation period P equal to that of the wheel set 821 (equal to or of the order of 60 seconds knowing that the mobile 821 is here a seconds mobile).
- the mobile 401 comprises a wheel 402 provided with a tenon 403 intended to cooperate periodically with a lever 404 so as to drive it in rotation against a spring element 405 returning the lever to a predefined position when the tenon is not in contact with the lever.
- this rocker comprises a beak 404a provided to cooperate with the tenon 403, as well as an arm 404b provided to come into contact with a pin 406 acting as a contactor when the beak 404a is lifted by the tenon 403.
- the loss of contact between the arm 404b and the pin 406 makes it possible to determine, at regular or substantially regular intervals (here every minute), the rotation period P. This information is then transmitted to an integrated circuit 407 of the comparison device 400, which is likely to be taken into consideration under the effect of the servo-control device 600.
- the servo device 600 makes it possible to reposition, in particular periodically, the pair of clamps 301, 302 in position Pos1.
- the servo device 600 shown in the figures 10 And 11 comprises a lever 602 actuated by the finishing gear train 82 of the 2000 movement, as well as a tenon 601 fixed to the toothed structure 305 of the monolithic structure 900.
- This lever 602 is designed to act periodically on the tenon 601 so as to retract the selection beak 306 of the toothed structure 305 which is mounted on the structure 900 by means of a flexible structure.
- the rocker 602 is designed to act punctually on the tenon 601 in a direction perpendicular to the direction of movement of the actuator 502, and in a direction S3, which makes it possible to move the toothed structure 305 away from the beak 306 and thus punctually disengage the beak 306 from the teeth 305.
- the beak then returns to position under the effect of the restitution of the flexible structures respectively connecting the beak 306 to the frame 304 and the toothed structure 305 to the rest of the structure 900. Due to the specific arrangement and conformation of the different elastic structures, the pair of clamps 301, 302 returns to position Pos1.
- the lever 602 is designed to be returned by a spring 603 and to be actuated by a cam 604 mounted on a wheel 605 itself mounted in derivation from the finishing gear train 82, for example from a center wheel 822 to which an hour hand 72 of the display device 700 is linked.
- the servo-control device 600 thus has the advantage of allowing the pair of clamps 301, 302 to be put back into position Pos1, and this periodically (in the embodiment described), without intervention from the actuating device and/or the wearer of the watch. Furthermore, the servo-control device also has the advantage of allowing a unitary action of displacement of the actuator 502 of a given amplitude, and this whatever the direction of actuation (S1, S2). Such a construction therefore makes it possible to minimize the consumption of electrical energy supplied by a primary source, because the action of the actuator is punctual and of a predefined amplitude. Such a construction is notably simpler to implement and more reliable than a construction in which the actuator 502 would be required to carry out all possible transitions between the three stable positions.
- the mobile 821 is regulated exclusively by the first oscillator 100, with an elastic return system 10 maintained or returned to position Pos1 under the effect of the device 600 so that the first oscillator 100 has a nominal frequency f1.
- the mobile 821 can be regulated by the first oscillator 100, independently in particular of the devices 200, 400.
- the servo device 600 has the advantage of being integrated within the mechanical or automatic movement 2000, in particular with regard to the elements 601, 602, 603, 604, 605.
- the actuating device 500 acting on the frequency selection device 300 can be controlled by the servo device 600.
- the regulating system 1000 also advantageously comprises an initialization device 800 of the counting device 200.
- the latter can advantageously be activated by an adjustment mechanism 91 of the display device 700 of the timepiece 3000, for example an adjustment mechanism integrated within the movement 2000.
- the counting device 200 is initialized in order to take into account the new effective position of the display device 700.
- the actuating device 500 can be inhibited over a given period following the action of the initialization device 800.
- the monolithic structure 900 is made of monocrystalline silicon. This advantageously makes it possible to group within it a large number of elements taking part in the regulating system 1000, in particular the devices 300, 500, 600.
- the structure 900 may be designed to be attached to the frame 6 of the mechanical or automatic movement 2000.
- the other elements of the regulating system 1000 may also be an integral part of the movement 2000.
- these other elements, in particular the electronic components, may be arranged on the periphery of the movement 2000, within the timepiece 3000.
- the comparison device 400 acts every minute or substantially every minute.
- a value VD can be established at this same frequency.
- the value VD established just before or just after the contact between the rocker 602 and the tenon 606 (which takes place every hour or substantially every hour) is taken into consideration by the actuating device 500.
- the value VD can also be established at any other frequency.
- the movement 2000 can be regulated exclusively by the first oscillator 100 (it is then a mechanical or automatic movement) or by the entire regulating system 1000.
- the gear chain 82 in particular the mobile 821, is at least partially regulated by the first oscillator 100.
- the inertial element 4 of the first oscillator 100 is an assembled balance comprising a balance 41 provided with screws or weights 43a which can be moved in order to allow fine adjustment of the rate of the movement 2000, of the order of a few seconds per day as illustrated in the Figure 3 .
- These screws or weights are for example fixed in a movable manner relative to a serge 410 of the balance 41.
- These screws or weights can for example be manipulated by a watchmaker when the balance is stopped, by means of a key or a screwdriver which allows them to be moved (by bringing them closer to or moving them away from the axis A4).
- These tools are generally equipped with means which allow the advance or recoil of the screw or weight to be indicated in order to allow a particularly fine adjustment of the rate of the movement.
- the rim 410 of the balance 41 advantageously comprises two pairs of weights 43a, 43b and 44a, 44b having distinct conformations, in particular different masses.
- the weights 43a, 43b are longer than the weights 44a, 44b.
- the weights 44a, 44b induce a finer adjustment of the than the weights 43a, 43b.
- the weights are moved in pairs in order to best maintain the balance of the assembled balance wheel 4.
- these weights allow adjustment of the rate of the 2000 movement over a range of ⁇ 2s/day.
- the actuation devices 500 and servo-control devices 600 act every hour or substantially every hour on the stiffness selection device 300. It is possible to provide an action at any other frequency.
- the devices for comparison, actuation of the selection device, and servocontrol of the selection device act periodically, namely at regular intervals.
- the comparison device and/or the actuation device and/or the servocontrol device are activated at a particular time, not necessarily periodic, for example when a control unit deems it appropriate in the event of a deviation in rate considered too significant.
- the wearer of the watch can himself activate the actuation device if he notices that the display device of the timepiece is moving ahead or behind.
- the actuation device can be a purely mechanical device, for example controlled by the wearer of the watch by means of pushers or correctors.
- the servo-control device can impose a nominal oscillation frequency on the first mechanical oscillator after the control unit or the wearer of the watch has intervened, this servo-control device being controlled by the gear train (at least partially) regulated by the first oscillator.
- the actuating device can be activated on demand, by a control unit or by the wearer himself.
- the activation of the servo-control device namely the connection between the finishing gear train and the tenon 601 fixed to the toothed structure 305 of the monolithic structure 900, for example by means of the contacting of the lever 602 with the cam 604 under the effect of an additional clutch system.
- the lever 602 would then be disconnected from the cam 604 when the actuating device is not actuated, for example during the conventional operation of the movement 2000.
- the comparison device 400 rests on a wheel set 401 having a rotation period P equal to that of the wheel set 821 of the chain 82 of the movement 2000 (equal to or of the order of 60 seconds, knowing that the wheel set 821 is in particular a seconds wheel set).
- the display element or the seconds hand 71 of the display device 700 is not essential for the proper functioning of the regulating system.
- the comparison device 400 could rest on the display element or the seconds hand 71 of the display device 700.
- the comparison device could comprise means (optical, for example) making it possible to identify the actual position of the display element or second hand 71 at a given time.
- the modification of the frequency of the first mechanical oscillator involves a modification of the stiffness of the elastic return system, in particular by a modification of the active length of the third elastic return element. It is nevertheless possible to envisage other means of modifying the frequency of the first oscillator.
- it is possible to modify the environment of the first mechanical oscillator so as to vary the aerodynamic friction to which the oscillating mass of the inertial element is subjected (as taught in the patent CH109521 ).
- a fairing could for example be provided to surround the oscillating mass of the inertial element and the conformation of the fairing (its geometry and/or its arrangement on the movement frame) could be modified under the effect of the servo-control and/or actuation devices.
- the electromagnetic environment of the first mechanical oscillator can also be modified under the effect of the servo-control and/or actuation devices, so as to vary its oscillation frequency.
- the mass elements could, for example, be made of piezoelectric material or magnetostrictive material (as taught within the application EP3120199 ).
- servo device modifies the frequency of the first oscillator according to a first technique and the actuator device modifies the frequency of the first oscillator according to a second technique.
- the regulating system implements the first step of operation according to the main mode in which the first mechanical oscillator 100 oscillates at the first predetermined frequency f1.
- the servo-control, comparison and actuation devices preferably act periodically, namely at regular intervals. In other words, these steps are repeated more particularly at regular intervals.
- the second step E2 is repeated periodically every minute or substantially every minute (first period P1), while the first and third steps E1, E3 are repeated periodically every hour or substantially every hour (second period P2).
- the second actuation step may only be implemented when the value VD is not included in the predefined tolerance range [a; b] as mentioned previously.
- the comparison step is advantageously implemented by the comparison device 400.
- the comparison step can be implemented at a regular time interval and/or at an interval defined by a watch movement 2000, for example every minute or every hour.
- the comparison step can be implemented at the request of a user or wearer of the timepiece.
- the user can act on an organ of the timepiece, such as a push button which activates the comparison device and/or the actuating device.
- the fourth step occurs at a regular time interval and/or at an interval defined by a 2000 clockwork movement, for example every hour.
- the second step may comprise or consist of a step of moving the pair of immobilizing clamps along the flexible blade.
- the solutions described are remarkable in that they comprise a servo-control device which makes it possible to impose a predetermined oscillation frequency f1 on the mechanical oscillator thanks to which the timepiece intrinsically has excellent precision.
- this servo-control device is controlled by a gear train, in particular a finishing gear train which drives the display device of the watch, which is at least partially regulated by said mechanical oscillator.
- this servo-control device could also be controlled by other means or devices, in particular in the case of a movement within which the rate correction is effective upstream of the fourth step occurring at regular time intervals and/or at defined intervals.
- this servo-control device can be at least controlled by a gear train, in particular a finishing gear train.
- this servo-control device makes it possible to impose a pivot frequency f1 on the mechanical oscillator, called “nominal”, which allows adequate operation of the mechanical oscillator, and this independently of the other devices 300, 400, 500, 600. Furthermore, according to the embodiment described, this servo-control device also has the advantage of allowing the selection of at least one other oscillation frequency (f2, f3) of the mechanical oscillator, by instructing the actuating device allowing the selection of at least one other oscillation frequency.
- the regulating system comprises a first mechanical oscillator whose “nominal” frequency can be modified, possibly at regular intervals, but which can be restored, possibly at regular intervals, under the effect of a servo-control device controlled by a gear train, in particular a finishing gear train, which is at least partially regulated by said first mechanical oscillator.
- “nominal” frequency (f1) we mean a frequency of the first mechanical oscillator determined during the design and/or during the assembly of said first oscillator in order to achieve a target chronometric precision when the gear train, in particular the finishing gear train, is regulated exclusively by said first oscillator.
- This assembly of the first oscillator may for example require a targeted adjustment of the stiffness, in particular of the active length, of a return element of the elastic return system taking part in the first oscillator, or by a targeted adjustment of weights arranged on an inertial element taking part in the first oscillator.
- the frequency f1 of the system is a frequency such that that the watch movement and/or the timepiece can be certified, in particular can obtain a chronometer certification by the COSC, or even such that the timepiece can obtain the “superlative chronometer” certification from the applicant.
- the regulating system comprises a first mechanical oscillator whose frequency f1 can be modified (by the actuating device of the selection device) but is then restored (by the servo-control device of the selection device), in particular restored autonomously by an element directly actuated by the finishing gear.
- the servo-control device makes it possible to impose a predetermined oscillation frequency on the mechanical oscillator, this device being controlled by a gear train, in particular the finishing gear train linked to a display device of the watch, which is at least partially regulated by said mechanical oscillator, and not by a third-party device or by the wearer of the watch.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Electromechanical Clocks (AREA)
- Electric Clocks (AREA)
Abstract
- un premier oscillateur mécanique (100) prévu pour réguler au moins partiellement un rouage (82) d'un mouvement horloger (2000), entraîné par un système moteur (81) ;
- un dispositif d'asservissement (600) configuré pour imposer un mode de fonctionnement principal dans lequel le premier oscillateur mécanique (100) oscille à une première fréquence prédéterminée (f1), le dispositif d'asservissement (600) étant piloté par un rouage (82) au moins partiellement régulé par le premier oscillateur (100) ; et
- un dispositif d'actionnement (500) configuré pour commander un passage dans un mode de fonctionnement auxiliaire dans lequel le premier oscillateur mécanique (100) oscille à une autre fréquence prédéterminée (f2, f3), différente de la première fréquence (f1).
Description
- L'invention concerne un système réglant pour une pièce d'horlogerie. L'invention concerne aussi un mouvement horloger comprenant un tel système réglant. L'invention concerne encore une pièce d'horlogerie comprenant un tel mouvement horloger ou un tel système réglant. L'invention concerne enfin un procédé de fonctionnement d'un tel système réglant.
- Même sur les montres automatiques présentant une bonne précision chronométrique, il demeure une préoccupation d'amélioration de la marche. Par « marche », nous entendons l'expression d'une différence, par unité de temps, entre deux états d'une pièce d'horlogerie, séparés par un intervalle de temps donné, un « état » pouvant se définir comme étant une différence, à un instant précis, entre l'heure indiquée par la pièce d'horlogerie et l'heure indiquée par une horloge de référence. Ces définitions sont conformes avec celles données dans la norme ISO 6426-2 (respectivement aux points 5.2 et 5.1).
- La demande
EP1158373 divulgue un oscillateur de type balancier-spiral, dont l'extrémité extérieure du spiral peut être actionnée par un moteur de sorte à modifier la longueur active du spiral afin de ralentir ou d'accélérer l'oscillateur. Ce document décrit un système de détection d'erreur disposé au niveau de l'ancre d'échappement (notamment par le biais d'un étoqueau piézoélectrique), qui va mettre en comparaison la fréquence effective de l'échappement et celle d'une base de temps tierce. Selon le résultat, le moteur associé à un système d'ajustement de l'erreur va tourner selon un premier sens ou un deuxième sens afin de raccourcir ou rallonger la longueur active du spiral. L'intervention sur le spiral peut être effectuée toutes les heures ou une fois par jour. - La demande
EP1164441 décrit un concept équivalent à celui connu de la demandeEP1158373 , mais avec une mise en oeuvre bien différente. Le système de détection d'erreur se trouve ici dans le rouage de finissage et comprend plus particulièrement un contacteur disposé sur un mobile de centre effectuant un tour en une heure, sur lequel est montée une aiguille des minutes. Ainsi, la détection d'erreur peut se faire toutes les heures. - Selon un premier mode de réalisation, le dispositif électromécanique est seulement capable de corriger une avance de la marche du mouvement. Pour ce faire, le dispositif vient bloquer la roue d'échappement durant un intervalle de temps correspondant à ladite avance.
- Le deuxième mode de réalisation présente quant à lui l'avantage de permettre une correction d'une avance ou d'un retard de la marche de la pièce d'horlogerie, comme cela est le cas au sein du mouvement connu de la demande
EP1158373 . A cet effet, le deuxième mode de réalisation comprend un dispositif permettant d'agir sur la longueur active du spiral par le biais d'un élément piézoélectrique disposé au niveau de l'extrémité extérieure du spiral. Celui-ci est susceptible d'être actionné selon un premier sens ou un deuxième sens afin de raccourcir ou rallonger la longueur active du spiral. - On connaît aussi des documents
CH6444 CH321947 - Le but de l'invention est d'améliorer les systèmes réglants connus. En particulier, l'invention propose un système réglant simple, fiable et permettant d'améliorer la précision des mouvements horlogers.
- Selon l'invention, un système réglant est défini par la revendication 1.
- Des modes de réalisation du système réglant sont définis par les revendications 2 à 8.
- Selon l'invention, un mouvement horloger est défini par la revendication 9.
- Selon l'invention, une pièce d'horlogerie est définie par la revendication 10.
- Selon l'invention, un procédé de fonctionnement est défini par la revendication 11.
- Des modes de réalisation du procédé de fonctionnement sont définis par les revendications 12 à 16.
- Les dessins annexés représentent, à titre d'exemple, un mode de réalisation d'une pièce d'horlogerie selon l'invention.
- La
figure 1 est une vue schématique d'un mode de réalisation d'une pièce d'horlogerie selon l'invention. - La
figure 2 est une vue de face d'un premier oscillateur du mode de réalisation de la pièce d'horlogerie selon l'invention. - La
figure 3 est une vue du mode de réalisation de la pièce d'horlogerie montrant un rouage de finissage. - La
figure 4 est une vue du mode de réalisation de la pièce d'horlogerie montrant un détail d'un dispositif de sélection de raideur. - La
figure 5 est une vue du mode de réalisation de la pièce d'horlogerie montrant l'intégration du dispositif de sélection de raideur. - La
figure 6 est une vue du mode de réalisation de la pièce d'horlogerie illustrant trois configurations du dispositif de sélection de raideur. - La
figure 7 est une vue du mode de réalisation de la pièce d'horlogerie montrant l'intégration d'un dispositif d'actionnement. - La
figure 8 est un logigramme illustrant le fonctionnement d'une pièce d'horlogerie selon l'invention. - La
figure 9 est une vue du mode de réalisation de la pièce d'horlogerie montrant l'intégration d'un dispositif de comparaison. - La
figure 10 est une vue du mode de réalisation de la pièce d'horlogerie montrant l'intégration d'un dispositif d'asservissement. - La
figure 11 est une vue du mode de réalisation de la pièce d'horlogerie illustrant un détail d'intégration du dispositif d'asservissement. - La
figure 12 est un ordinogramme illustrant le procédé de fonctionnement du système réglant selon l'invention. - Un mode de réalisation particulier d'une pièce d'horlogerie 3000 est décrit ci-après en détail en référence aux
figures 1 à 12 . - La pièce d'horlogerie 3000 est par exemple une montre, en particulier une montre bracelet. La pièce d'horlogerie 3000 comprend un mouvement horloger 2000 destiné à être monté dans un boîtier ou une boîte de pièce d'horlogerie afin de le protéger de l'environnement extérieur.
- Le mouvement horloger 2000 est un mouvement mécanique, notamment un mouvement automatique, ou un mouvement hybride.
- Le mouvement horloger 2000 comprend :
- un oscillateur 100,
- un système d'échappement 83,
- une rouage de finissage 82, et
- un système moteur 81 incluant un organe moteur 811 tel qu'un barillet 811 comme représenté sur la
figure 3 . - Le premier oscillateur 100 permet de réguler, notamment par l'intermédiaire du système d'échappement 83, l'entraînement du rouage de finissage 82, qui est actionnée sous l'effet du système moteur 81. En particulier, ce premier oscillateur 100 permet de réguler l'entraînement d'un mobile 821 sur lequel est monté un élément d'affichage 71, comme une aiguille 71 d'un dispositif d'affichage 700 de la pièce d'horlogerie 3000. Le mobile 821 est par exemple un mobile des secondes 821 sur lequel est monté une aiguille des secondes 71.
- Le mouvement horloger 2000 comprend un système réglant 1000.
- Le système réglant comprend :
- le premier oscillateur mécanique 100 prévu pour réguler au moins partiellement le rouage 82 du mouvement horloger 2000, entraîné par le système moteur 81 ;
- un dispositif d'asservissement 600 configuré pour imposer un mode de fonctionnement principal dans lequel le premier oscillateur mécanique 100 oscille à une première fréquence prédéterminée f1, le dispositif d'asservissement 600 étant piloté par le rouage 82 au moins partiellement régulé par le premier oscillateur 100 ; et
- un dispositif d'actionnement 500 configuré pour commander un passage dans un mode de fonctionnement auxiliaire dans lequel le premier oscillateur mécanique 100 oscille à une autre fréquence prédéterminée f2, f3, différente de la première fréquence f1.
- Par « fréquence prédéterminée », nous entendons ici une fréquence déterminée d'avance, qui est centrée sur une valeur f1 ou f2 ou f3. Naturellement, ces fréquences prédéterminées f1, f2, f3 peuvent chacune varier sur une plage donnée, dont l'amplitude est fonction des tolérances du système. Préférentiellement, la fréquence f1 est susceptible de varier sur une plage plus restreinte, voire beaucoup plus restreinte que celles associées aux fréquences f2, f3, de sorte à définir une fréquence nominale f1 du premier oscillateur.
- Avantageusement, comme illustré sur la
figure 2 , le premier oscillateur 100 comprend une masse oscillante 41 d'un élément inertiel 4, notamment un balancier, et un premier élément de rappel élastique 1, notamment un ressort-spiral. Le premier oscillateur 100 comprend encore un deuxième élément de rappel élastique faisant partie d'un support 2 du premier élément de rappel élastique 1. - Le ressort-spiral 1 est doté d'une lame 11 :
- dont une première extrémité proximale 14 est reliée à la masse oscillante 41 par l'intermédiaire d'un axe 42 d'axe géométrique A4, et
- dont une deuxième extrémité distale comprend un premier organe de liaison 12 prévu pour être fixé à un deuxième organe de liaison 23 du support 2, notamment par le biais de tenons ou de goupilles 13a, 13b prévues pour venir s'insérer respectivement au sein d'ouvertures 12a, 12b et 21a, 21b formées respectivement sur les premier et deuxième organes de liaison, en particulier au niveau de chacune de leurs extrémités.
- Le deuxième organe de liaison 23 est fixé à un cadre rigide 20 par le biais de lames élastiques 21, 22, chacune dotées de portions flexibles au niveau de leurs extrémités respectives. Ainsi, le deuxième élément de rappel élastique prend la forme du deuxième organe de liaison 23 articulé sur le corps 20 par le biais des lames élastiques 21, 22.
- Un troisième élément de rappel élastique 3 prend quant à lui la forme d'une unique lame élastique 31, ici rectiligne, qui est solidaire du deuxième organe de liaison 23, et qui est par exemple agencée entre les lames élastiques 21, 22 en périphérie extérieure du deuxième organe de liaison 23.
- Dans le mode de réalisation décrit, les éléments 20, 21, 22, 23 du support 2 et la lame 31 du troisième élément de rappel élastique 3 forment une structure monolithique 900 du système réglant 1000, qui est solidaire d'un bâti 6 de la pièce d'horlogerie 3000, en particulier du mouvement 2000.
- De manière plus générale, un système de rappel élastique 10 du premier oscillateur 100 comprend ainsi des premier, deuxième, et troisième éléments de rappel élastique, le premier élément de rappel élastique 1 et le deuxième élément de rappel élastique 2 étant montés en série entre l'élément inertiel 4 et le bâti 6, et le troisième élément de rappel élastique 3 et le deuxième élément de rappel élastique 2 étant montés en parallèle entre ledit bâti 6 et le premier élément de rappel élastique 1.
- Dans le mode de réalisation décrit, le dispositif de sélection de raideur 300 du système de rappel élastique 10 permet de sélectionner une raideur parmi 3 raideurs prédéterminées ksr1, ksr2, ksr3,
- la raideur ksr1 induisant une fréquence nominale f1 du premier oscillateur 100,
- la raideur ksr2 étant supérieure à la raideur ksr1 et induisant une fréquence f2 supérieure à la fréquence f1, et
- la raideur ksr3 étant inférieure à la raideur ksr1 et induisant une fréquence f3 inférieure à la fréquence f1.
- Par « raideur prédéterminée », nous entendons ici une raideur déterminée d'avance, qui est centrée sur une valeur k1 ou k2 ou k3. Naturellement, ces raideurs prédéterminées k1, k2, k3 peuvent chacune varier sur une plage donnée, dont l'amplitude est fonction des tolérances du système. Préférentiellement, la raideur k1 est susceptible de varier sur une plage plus restreinte, voire beaucoup plus restreinte que celles associées aux raideurs k2, k3, de sorte à induire une fréquence nominale f1 du premier oscillateur.
- Ainsi, une raideur ksr2 du système de rappel élastique 10 permet de corriger un éventuel retard du dispositif d'affichage de la pièce d'horlogerie ou permet de corriger un éventuel retard d'un mobile pilotant un éventuel dispositif d'affichage de la pièce d'horlogerie, et une raideur ksr3 du système de rappel élastique 10 permet de corriger une éventuelle avance du dispositif d'affichage de la pièce d'horlogerie ou permet de corriger une éventuelle avance d'un mobile pilotant un éventuel dispositif d'affichage de la pièce d'horlogerie, comme cela sera décrit ci-après.
- Dans le mode de réalisation décrit, le dispositif de sélection de raideur 300 du système de rappel élastique 10 agit spécifiquement sur la raideur du troisième élément de rappel élastique 3, plus particulièrement sur la raideur de la lame élastique 31. Ainsi, le dispositif de sélection de raideur 300 permet de sélectionner une raideur déterminée du troisième élément de rappel élastique 3 parmi 3 raideurs prédéterminées k31, k32, k33, les raideurs ksr1, ksr2, ksr3 du système de rappel élastique 10 étant corrélées respectivement avec les raideurs k31, k32, k33. Ainsi, une raideur k31 de la lame élastique 31 permet de définir une fréquence nominale f1 du premier oscillateur 100, une raideur k32 de la lame élastique 31 permet de corriger un éventuel retard du dispositif d'affichage de la pièce d'horlogerie ou un éventuel retard d'un mobile pilotant un éventuel dispositif d'affichage de la pièce d'horlogerie, et une raideur k33 de la lame élastique 31 permet de corriger une éventuelle avance du dispositif d'affichage de la pièce d'horlogerie ou une éventuelle avance d'un mobile pilotant un éventuel dispositif d'affichage de la pièce d'horlogerie, comme cela sera décrit ci-après.
- Il apparait qu'un tel agencement d'éléments de rappel élastique 1, 2, 3, avec des raideurs respectives k1, k2, k3 judicieusement choisies, permet un réglage de la marche particulièrement fin. Par exemple, une variation de ±10% de raideur k3 induit une variation de marche de la pièce d'horlogerie comprenant le premier oscillateur 100 égale ou sensiblement égale à ±10 s/j.
- En conséquence, une période de rotation P du mobile des secondes 821 est fonction de la fréquence du premier oscillateur 100, si bien que le dispositif de sélection de raideur 300 permet de définir ladite période P du mobile 821.
- Dans le mode de réalisation décrit, le dispositif de sélection de raideur 300 prend ici la forme d'un dispositif de modification de la longueur active de la lame élastique 31 comme illustré sur la
figure 4 . A cet effet, le dispositif 300 comprend une paire de pinces 301, 302 enserrant la lame élastique 31 et apte à se déplacer selon la direction longitudinale de ladite lame 31 de sorte à atteindre trois positions stables prédéfinies Pos1, Pos2, Pos3 permettant de définir respectivement les raideurs k31, k32, k33. - En conséquence, le dispositif de sélection 300 peut comprendre une paire de pinces 301, 302 déterminant une longueur active, notamment trois longueurs actives, du système de rappel élastique 10.
- En l'occurrence :
- La position Pos1 permet de définir la période de rotation P du mobile 821, avec une raideur ksr1 du système de rappel élastique 10, en particulier une raideur k31 du troisième élément de rappel élastique 3, et une fréquence nominale f1 de l'oscillateur 100.
- La position Pos2 permet de réduire la période de rotation P du mobile 821, avec une raideur ksr2>ksr1 du système de rappel élastique 10, en particulier une raideur k32>k31 du troisième élément de rappel élastique 3, et une fréquence f2>f1 de l'oscillateur 100. Ainsi, cette position Pos2 permet à l'élément d'affichage 71 de rattraper un retard.
- La position Pos3 permet d'augmenter la période de rotation P du mobile 821, avec une raideur ksr3<ksr1 du système de rappel élastique 10, en particulier une raideur k32<k31 du troisième élément de rappel élastique 3, et une fréquence f3<f1 de l'oscillateur 100. Ainsi, cette position Pos3 permet à l'élément d'affichage 71 de compenser une avance.
- Avantageusement, les pinces 301, 302 sont chacune montées sur la structure monolithique 900, en particulier sur un cadre 304 de la structure monolithique 900, par le biais de lames élastiques, et sont rappelées à l'encontre de la lame élastique 31 sous l'effet d'un tenon 303 qui permet d'agir à l'encontre des lames élastiques en sollicitant les pinces 301, 302 sensiblement en pivotement autour de leur axe de rotation respectif A301, A302. En particulier, les pinces 301, 302 sont prévues pour serrer la lame élastique 31 avec une force suffisante pour éviter tout jeu mécanique lors des oscillations de l'oscillateur. Cette force doit toutefois être déterminée de sorte à permettre le déplacement des pinces 301, 302 pour passer d'une position stable à une autre position stable. Typiquement, cette force peut être comprise entre 0,1 mN et 10 mN selon les dimensions du système réglant.
- Le système de sélection comprend :
- les pinces 301, 302,
- le tenon 303,
- le cadre 304,
- une structure dentée 305,
- un bec de sélection 306, et
- un tenon 307.
- Les pinces 301, 302 sont susceptibles d'être maintenues dans l'une ou l'autre des positions Pos1, Pos2, Pos3 grâce à la structure dentée 305 prévue pour positionner le bec de sélection 306 relié au cadre 304 par le biais d'une structure flexible. En particulier, la structure dentée 305 comprend 3 creux de dents au sein desquels le bec 306 est susceptible de venir se positionner sous l'effet du tenon 307 qui permet de contraindre la structure flexible reliant le bec 306 au cadre 304 de sorte à maintenir en contact ledit bec 306 à l'encontre de la structure dentée 305.
- A titre illustratif, la
figure 5 représente le dispositif de sélection 300 en couleur noire. Celui-ci fait ici partie de la structure monolithique 900 prévue pour être rapportée sur le bâti 6 du mouvement 2000, en particulier sur une ébauche. - Ainsi, de manière plus générale, le dispositif de sélection 300 comprend au moins une paire de pinces 301,302 prévues pour agir sur la longueur active de la lame élastique 31, ainsi qu'un bec de sélection 306 coopérant avec une structure dentée 305 qui sont prévues pour positionner la paire de pinces 301, 302 selon l'une des trois positions stables Pos1, Pos2, Pos3 prédéfinies par la denture de la structure 305. La
figure 6 comprend : - une vue 6a représentant le dispositif de sélection 300 en position Pos1,
- une
figure 6b représentant le dispositif de sélection 300 en position Pos 2, et - une
figure 6c représentant le dispositif de sélection 300 en position Pos3. - Ce dispositif de sélection 300 est actionné périodiquement par le dispositif d'actionnement 500. En particulier, ce dispositif d'actionnement 500 permet de positionner la paire de pinces 301, 302 selon l'une des trois positions stables Pos1, Pos2, Pos3 en déplaçant, ou non, le bec de sélection 306 en regard de la structure dentée 305.
- Dans le mode de réalisation décrit, le dispositif d'actionnement 500 se présente sous la forme d'un dispositif électromécanique comprenant une source d'énergie électrique 501 et un actionneur électromécanique 502. La source d'énergie électrique 501 permet de délivrer une tension électrique, positive ou négative, à l'actionneur électromécanique 502 et permet ainsi d'agir sur le cadre 304 par l'intermédiaire d'un bras 503 articulé par un guidage flexible, notamment en pivotement autour d'un axe de rotation virtuel A503. Ce bras 503 est respectivement relié à l'actionneur 502 et au cadre 304 par de multiples structures élastiques. En particulier, le bras 503 s'inscrit également au sein de la structure monolithique 900, et l'actionneur 502 est prévu pour être disposé au sein d'un logement 504 de cette même structure monolithique.
- A titre illustratif, la
figure 7 représente une vue des éléments du dispositif d'actionnement 500 formés sur la structure 900. Ces derniers sont représentés en noir, à l'instar de ceux du dispositif de sélection 300. L'actionneur 502 est quant à lui représenté par des hachures. - L'actionneur 502 est prévu pour être actionné selon une direction parallèle ou sensiblement parallèle à la direction longitudinale de la lame 31, selon un premier ou un deuxième sens en fonction du signe de la tension électrique délivrée par la source d'énergie électrique 501. Avantageusement, cette tension n'est délivrée que de manière ponctuelle et périodique de sorte à faire exclusivement déplacer le bec de sélection 306 vis-à-vis de la structure dentée 305, le bec étant maintenu en position à l'encontre de la structure 305 sous l'effet du tenon 307 et sous l'effet des diverses structures élastiques qui permettent de faire en sorte que le bec 306 reste crocheté entre deux dents de la structure dentée 305. Les différentes positions sont avantageusement mécaniquement stables. Une telle conception permet donc de minimiser la consommation d'énergie électrique fournie par la source d'énergie électrique 501 permettant d'alimenter le dispositif d'actionnement 500, mais aussi un éventuel dispositif de mise en comparaison 400 qui sera décrit ci-après.
- Préférentiellement, l'actionneur 502 actionne la paire de pinces 301, 302 exclusivement lorsque la paire de pinces 301, 302 se trouve en position Pos1 (
Figure 6a ), comme cela est décrit ci-après. Dans cette configuration, le bec 306 se trouve entre deux dents disposées au centre de la structure dentée 305. Lorsque l'actionneur 502 actionne dans un premier sens illustré par une flèche pleine S1 de lafigure 7 , le bec est entraîné dans un deuxième sens illustré par une flèche pleine S1', opposé au premier sens, de par l'emplacement de l'axe d'articulation A503 du bras 503. Une telle action induit ainsi le déplacement du bec 306 de sorte que la paire de pinces 301, 302 puisse se positionner en position Pos3 (Figure 6c ). Réciproquement, lorsque l'actionneur 502 actionne dans un deuxième sens illustré par une flèche en trait tillé S2 (présentant le même sens que la flèche S1'), le bec est entraîné dans un premier sens illustré par une flèche en trait tillé S2' (présentant le même sens que la flèche S1), opposé au deuxième sens. Une telle action induit ainsi le déplacement du bec de sorte que la paire de pinces 301, 302 puisse se positionner en position Pos2 (Figure 6b ). - Le signe de la tension fournie par la source d'énergie électrique 501, et donc le sens de déplacement S1, S2 (ou S1', S2') de l'actionneur 502 ou du bec 306, est fonction d'une valeur VD qui résulte d'un dispositif de mise en comparaison 400. Le dispositif de mise en comparaison 400 peut être au moins partiellement électronique. Ce dispositif permet d'établir au moins une valeur de différence VD entre la période de rotation P du mobile 821 et une période de référence de rotation Pref dudit mobile 821 donnée par un dispositif de comptage 200. Le dispositif de comptage 200 comprend un deuxième oscillateur 210 présentant une fréquence F1 significativement supérieure à la fréquence f1 du premier oscillateur 100. Il peut par exemple s'agir d'un oscillateur thermo-compensé présentant une fréquence de l'ordre de plusieurs dizaines ou centaines de kHz ou MHz et présentant une excellente stabilité, qui permet ainsi de définir une période de référence de rotation Pref qui peut être considérée comme la période que devrait présenter idéalement le mobile 821 en toutes circonstances.
- Dans le cas de figure où la période P correspond sensiblement à la période Pref, la source d'énergie électrique 501 ne délivre pas de tension électrique, si bien que l'actionneur 502 n'actionne pas la paire de pinces 301, 302. Ainsi, la paire de pinces 301, 302 reste maintenue en position Pos1 (
Figure 6a ). En particulier, la source d'énergie électrique 501 ne délivre pas de tension électrique dans le cas de figure où :
- Préférentiellement, x est un nombre réel, a un nombre réel négatif, et b un nombre réel positif.
- Dans le cas de figure où VD < a, la source d'énergie électrique 501 délivre un courant électrique avec une tension d'un premier signe, si bien que l'actionneur 501 actionne selon un premier sens de sorte à faire déplacer la paire de pinces 301, 302 dans la position Pos2, qui permet au mouvement de corriger un retard affiché par l'élément d'affichage 71.
- Dans le cas de figure où VD > b, la source d'énergie électrique 501 délivre un courant électrique avec une tension d'un deuxième signe, opposé au premier signe, si bien que l'actionneur 501 actionne selon un deuxième sens, opposé au premier sens, de sorte à faire déplacer la paire de pinces 301, 302 dans la position Pos3, qui permet au mouvement de corriger une avance affichée par l'élément d'affichage 71.
- Ainsi, le dispositif de comparaison 400 est agencé de sorte à comparer une période de rotation P du mobile 821 du rouage de finissage 82 et une période de référence de rotation Pref dudit mobile 821.
- A titre illustratif, la
figure 8 représente un logigramme résumant ces différents cas de figure. - Dans le mode de réalisation décrit, le dispositif de mise en comparaison 400 comprend une bascule 404 et un mobile 401 relié cinématiquement au mobile 821 du rouage de finissage 82 du mouvement 2000. Le rapport d'engrenage est ici de 1, si bien que ce mobile 401 présente également une période de rotation P égale à celle du mobile 821 (égale ou de l'ordre de 60 secondes sachant que le mobile 821 est ici un mobile des secondes). Le mobile 401 comprend une roue 402 dotée d'un tenon 403 prévu pour coopérer de manière périodique avec une bascule 404 de sorte à l'entraîner en rotation à l'encontre d'un élément ressort 405 rappelant la bascule dans une position prédéfinie lorsque le tenon n'est pas en contact avec la bascule. En particulier, cette bascule comprend un bec 404a prévu pour coopérer avec le tenon 403, ainsi qu'un bras 404b prévu pour venir en contact avec une goupille 406 faisant office de contacteur lorsque le bec 404a est soulevé par le tenon 403. La perte de contact entre le bras 404b et la goupille 406 permet de déterminer, à intervalles réguliers ou sensiblement réguliers (ici toutes les minutes), la période de rotation P. Cette information est ensuite transmise à un circuit intégré 407 du dispositif de mise en comparaison 400, qui est susceptible d'être prise en considération sous l'effet du dispositif d'asservissement 600.
- Le dispositif d'asservissement 600 permet de repositionner, notamment périodiquement, la paire de pinces 301, 302 en position Pos1.
- Dans le mode de réalisation décrit, avantageusement, le dispositif d'asservissement 600 permet :
- d'une part de repositionner périodiquement la paire de pinces 301, 302 en position Pos1, et
- d'autre part de commander le dispositif d'actionnement 500 afin de permettre le déplacement éventuel de la paire de pinces 301, 302 en position Pos2 ou Pos3.
- Le dispositif d'asservissement 600 représenté sur les
figures 10 et11 comprend une bascule 602 actionnée par le rouage de finissage 82 du mouvement 2000, ainsi qu'un tenon 601 fixé à la structure dentée 305 de la structure monolithique 900. Cette bascule 602 est prévue pour agir périodiquement sur le tenon 601 de sorte à escamoter le bec de sélection 306 de la structure dentée 305 qui est montée sur la structure 900 par le biais d'une structure flexible. En particulier, la bascule 602 est prévue pour agir ponctuellement sur le tenon 601 selon une direction perpendiculaire à la direction de déplacement de l'actionneur 502, et selon un sens S3, ce qui permet d'éloigner la structure dentée 305 du bec 306 et ainsi dégager ponctuellement le bec 306 de la denture 305. Le bec revient ensuite en position sous l'effet de la restitution des structures flexibles reliant respectivement le bec 306 au cadre 304 et la structure dentée 305 au reste de la structure 900. De par l'agencement et la conformation spécifiques des différentes structures élastiques, la paire de pinces 301, 302 revient en position Pos1. - Plus particulièrement, la bascule 602 est prévue pour être rappelée par un ressort 603 et être actionnée par une came 604 montée sur une roue 605 montée elle-même en dérivation du rouage de finissage 82, par exemple depuis un mobile de centre 822 à laquelle est liée une aiguille des heures 72 du dispositif d'affichage 700.
- Lorsque la bascule 602 agit sur le tenon 601, celle-ci est également prévue pour venir en contact avec un contacteur 606, qui va informer le dispositif d'actionnement 500 de la mise en place de la paire de pinces 301, 302 en position Pos1. Cette information permet d'activer le dispositif d'actionnement 500 et ainsi actionner le dispositif de sélection 300 en prenant en considération la valeur VD ou la dernière valeur VD résultant du dispositif de mise en comparaison 400.
- Le dispositif d'asservissement 600 a ainsi pour avantage de permettre une remise en place de la paire de pinces 301, 302 en position Pos1, et ce de manière périodique (dans le mode de réalisation décrit), sans intervention du dispositif d'actionnement et/ou du porteur de la montre. Par ailleurs, le dispositif d'asservissement a également pour avantage de permettre une action unitaire de déplacement de l'actionneur 502 d'une amplitude donnée, et ce quel que soit le sens d'actionnement (S1, S2). Une telle construction permet donc de minimiser la consommation d'énergie électrique fournie par une source primaire, car l'action de l'actionneur est ponctuelle et d'une amplitude prédéfinie. Une telle construction est notamment plus simple à implémenter et plus fiable qu'une construction dans laquelle l'actionneur 502 serait tenu d'effectuer toutes les transitions possibles entre les trois positions stables. Par ailleurs, en cas de non fonctionnement ou de défaillance des dispositifs 400 et/ou 500, le mobile 821 est régulé exclusivement par le premier oscillateur 100, avec un système de rappel élastique 10 maintenu ou rappelé en position Pos1 sous l'effet du dispositif 600 de sorte que le premier oscillateur 100 présente une fréquence nominale f1.
- Ainsi, le mobile 821 peut être régulé par le premier oscillateur 100, indépendamment notamment des dispositifs 200, 400.
- Préférentiellement, le dispositif d'asservissement 600 a pour avantage de s'intégrer au sein du mouvement mécanique ou automatique 2000, notamment pour ce qui concerne les éléments 601, 602, 603, 604, 605.
- En conséquence de ce qui a été décrit précédemment, le dispositif d'asservissement 600 et/ou le dispositif d'actionnement 500 peuvent agir sur le dispositif de sélection de fréquence 300 qui configuré de sorte à définir trois fréquences d'oscillation comme suit :
- la première fréquence f1,
- une deuxième fréquence f2 inférieure à la première fréquence f1, et
- une troisième fréquence f3 supérieure à la première fréquence f1.
- En particulier, le dispositif d'actionnement 500 agissant sur le dispositif de sélection de fréquence 300 peut être piloté par le dispositif d'asservissement 600.
- Afin de permettre une intervention de réglage sur un dispositif d'affichage 700 comprenant notamment les éléments d'affichage 71 et 72, en particulier une mise à l'heure, le système réglant 1000 comprend également de manière avantageuse un dispositif d'initialisation 800 du dispositif de comptage 200. Celui-ci peut avantageusement être activé par un mécanisme de réglage 91 du dispositif d'affichage 700 de la pièce d'horlogerie 3000, par exemple un mécanisme de réglage intégré au sein du mouvement 2000. Ainsi, à l'issue d'une mise à l'heure, le dispositif de comptage 200 est initialisé afin de tenir compte de la nouvelle position effective du dispositif d'affichage 700. Avantageusement, le dispositif d'actionnement 500 pourra être inhibé sur une période donnée suite à l'action du dispositif d'initialisation 800.
- De préférence, la structure monolithique 900 est en silicium monocristallin. Celle-ci permet avantageusement de regrouper en son sein un grand nombre d'éléments prenant part au système réglant 1000, en particulier aux dispositifs 300, 500, 600.
- La structure 900 peut être prévue pour être rapportée sur le bâti 6 du mouvement mécanique ou automatique 2000. Les autres éléments du système réglant 1000 peuvent également faire partie intégrante du mouvement 2000. En alternative, ces autres éléments, en particulier les composants électroniques, peuvent être agencés en périphérie du mouvement 2000, au sein de la pièce d'horlogerie 3000.
- Avantageusement, le dispositif de mise en comparaison 400 agit toutes les minutes ou sensiblement toutes les minutes. Ainsi, une valeur VD peut être établie à cette même fréquence. Dans le mode de réalisation décrit, seule la valeur VD établie juste avant ou juste après le contact entre la bascule 602 et le tenon 606 (qui a lieu toutes les heures ou sensiblement toutes les heures) est prise en considération par le dispositif d'actionnement 500. La valeur VD peut aussi être établie à toute autre fréquence.
- Avantageusement, le mouvement 2000 peut être régulé exclusivement par le premier oscillateur 100 (il s'agit alors d'un mouvement mécanique ou automatique) ou bien par l'entier du système réglant 1000. Ainsi, la chaîne de rouage 82, en particulier le mobile 821, est au moins partiellement régulé par le premier oscillateur 100.
- Préférentiellement, l'élément inertiel 4 du premier oscillateur 100 est un balancier assemblé comprenant un balancier 41 doté de vis ou de masselottes 43a déplaçables afin de permettre un ajustement fin de la marche du mouvement 2000, de l'ordre de quelques secondes par jour comme illustré sur la
figure 3 . Ces vis ou masselottes sont par exemple fixées de manière déplaçable relativement à une serge 410 du balancier 41. Ces vis ou masselottes peuvent par exemple être manipulées par un horloger lorsque le balancier est à l'arrêt, par le biais d'une clé ou d'un tournevis qui permet de les déplacer (en les rapprochant ou en les éloignant de l'axe A4). Ces outils sont généralement dotés de moyens qui permettent d'indiquer l'avance ou le recul de la vis ou de la masselotte afin de permettre un réglage particulièrement fin de la marche du mouvement. - Dans le mode de réalisation décrit, la serge 410 du balancier 41 comprend avantageusement deux paires de masselottes 43a, 43b et 44a, 44b présentant des conformations distinctes, en particulier des masses différentes. En particulier, les masselottes 43a, 43b sont plus longues que les masselottes 44a, 44b. Ainsi, pour un même déplacement en regard de l'axe A4, les masselottes 44a, 44b induisent un réglage plus fin de la marche que les masselottes 43a, 43b. Préférentiellement, les masselottes sont déplacées par paire afin de maintenir au mieux l'équilibre du balancier assemblé 4.
- Avantageusement, ces masselottes permettent un réglage de la marche du mouvement 2000 sur une plage ±2s/j.
- Préférentiellement, pour un premier oscillateur 100 doté d'une fréquence nominale de 4 Hz, ksr2 = 1,1.ksr1 et ksr3 = 0,9.ksr1, si bien que les positions Pos2 et Pos3 du dispositif de sélection 300 induisent respectivement une avance et un retard d'environ 10 s/j.
- Préférentiellement, les dispositifs d'actionnement 500 et d'asservissement 600 agissent toutes les heures ou sensiblement toutes les heures sur le dispositif de sélection de raideur 300. Il est possible de prévoir une action à toute autre fréquence.
- Dans le mode de réalisation décrit plus haut, les dispositifs de mise en comparaison, d'actionnement du dispositif de sélection, et d'asservissement du dispositif de sélection agissent périodiquement, à savoir à intervalles réguliers. En variante, le dispositif de mise en comparaison et/ou le dispositif d'actionnement et/ou le dispositif d'asservissement s'activent à un moment particulier, non nécessairement périodique, par exemple lorsqu'une unité de commande le juge opportun en cas de déviation de marche considérée comme trop conséquente. Alternativement ou complémentairement encore, le porteur de la montre peut lui-même activer le dispositif d'actionnement s'il constate une avance ou un retard du dispositif d'affichage de la pièce d'horlogerie. Alternativement ou complémentairement encore, le dispositif d'actionnement peut être un dispositif purement mécanique, par exemple piloté par le porteur de la montre au moyen de poussoirs ou de correcteurs.
- Quel que soit le mode de réalisation ou la variante, le dispositif d'asservissement peut imposer une fréquence d'oscillation nominale au premier oscillateur mécanique après que l'unité de commande ou le porteur de la montre est intervenu, ce dispositif d'asservissement étant piloté par le rouage (au moins partiellement) régulé par le premier oscillateur.
- Dans un mode de réalisation alternatif, le dispositif d'actionnement peut être activé à la demande, par une unité de commande ou par le porteur lui-même. Ceci implique par la même occasion l'activation du dispositif d'asservissement, à savoir la mise en relation entre le rouage de finissage et le tenon 601 fixé à la structure dentée 305 de la structure monolithique 900, par exemple par le biais de la mise en contact de la bascule 602 avec la came 604 sous l'effet d'un système d'embrayage annexe. Dans ce cas de figure particulier, la bascule 602 serait alors déconnectée de la came 604 lorsque le dispositif d'actionnement n'est pas actionné, par exemple lors du fonctionnement conventionnel du mouvement 2000.
- Selon le mode de réalisation décrit, le dispositif de mise en comparaison 400 repose sur un mobile 401 présentant une période de rotation P égale à celle du mobile 821 de la chaîne 82 de rouage du mouvement 2000 (égale ou de l'ordre de 60 secondes sachant que le mobile 821 est en particulier un mobile des secondes). Dans ce cas de figure, l'élément d'affichage ou l'aiguille des secondes 71 du dispositif d'affichage 700 n'est pas indispensable au bon fonctionnement du système réglant. Alternativement, le dispositif de mise en comparaison 400 pourrait reposer sur l'élément d'affichage ou l'aiguille des secondes 71 du dispositif d'affichage 700. A cet effet, le dispositif de mise en comparaison pourrait comprendre des moyens (optiques, par exemple) permettant d'identifier la position effective de l'élément d'affichage ou de l'aiguille des secondes 71 à un instant donné.
- Dans le mode de réalisation décrit, la modification de la fréquence du premier oscillateur mécanique passe par une modification de la raideur du système de rappel élastique, en particulier par une modification de longueur active du troisième élément de rappel élastique. Il est néanmoins possible d'envisager d'autres moyens de modifier la fréquence du premier oscillateur. A titre d'exemple, il est envisageable de modifier l'environnement du premier oscillateur mécanique de sorte à faire varier les frottements aérodynamiques auquel est soumis la masse oscillante de l'élément inertiel (comme enseigné au sein du brevet
CH109521 - L'environnement électromagnétique du premier oscillateur mécanique peut également être modifiable sous l'effet des dispositifs d'asservissement et/ou d'actionnement, de sorte à faire varier sa fréquence d'oscillation.
- Il est également envisageable de modifier l'inertie de l'élément inertiel en jouant sur le déplacement d'éléments massiques ou de masselottes disposées sur la masse oscillante de l'élément inertiel. Dans ce cas de figure, les positions respectives des éléments massiques ou des masselottes en regard de la masse oscillante sont fonction des dispositifs d'asservissement et/ou d'actionnement. Pour ce faire, les éléments massiques pourraient par exemple être en matériau piézoélectrique ou en matériau magnétostrictif (comme enseigné au sein de la demande
EP3120199 ). - Ainsi, de manière plus générale, la fréquence du premier oscillateur peut être modifiée par :
- une variation de la raideur du système de rappel élastique du premier oscillateur, en particulier une modification de la longueur active d'un élément de rappel élastique du système de rappel élastique,
- une variation de l'inertie de l'élément inertiel du premier oscillateur, en particulier un déplacement d'éléments massiques de l'élément inertiel,
- une variation de l'environnement aérodynamique et/ou électromagnétique du premier oscillateur.
- Ces techniques peuvent éventuellement être combinées de sorte que le dispositif d'asservissement modifie la fréquence du premier oscillateur selon une première technique et le dispositif d'actionnement modifie la fréquence du premier oscillateur selon une deuxième technique.
- Un mode d'exécution d'un procédé de fonctionnement selon l'invention est décrit ci-après. Ce mode d'exécution est en particulier un mode d'exécution d'un procédé de fonctionnement du système réglant 1000 décrit précédemment.
- Le procédé comprenant au moins une itération des étapes suivantes et de préférence plusieurs itérations des étapes suivantes qui sont exécutées en séquence :
- une première étape de fonctionnement selon un mode principal dans lequel le premier oscillateur mécanique 100 oscille à la première fréquence prédéterminée f1, puis
- une deuxième étape dans laquelle le dispositif d'actionnement 500 modifie la fréquence du premier oscillateur mécanique 100, puis
- en conséquence de la deuxième étape, une troisième étape de fonctionnement selon un mode auxiliaire dans lequel le premier oscillateur mécanique 100 oscille à la deuxième fréquence f2 ou à la troisième fréquence f3, puis
- une quatrième étape dans laquelle un dispositif d'asservissement 600 impose un retour dans le mode de fonctionnement principal, ce dispositif d'asservissement 600 étant piloté par le rouage 82 au moins partiellement régulé par le premier oscillateur 100.
- En conséquence de la quatrième étape, le système réglant met en oeuvre la première étape de fonctionnement selon le mode principal dans lequel le premier oscillateur mécanique 100 oscille à la première fréquence prédéterminée f1.
- Autrement dit, comme illustré sur la
figure 12 , le procédé peut comprendre : - une étape E1 d'initialisation ayant lieu à un instant t1 donné, qui permet d'imposer une valeur nominale de raideur ksr1 (impliquant la fréquence f1) du système de rappel élastique sous l'effet du dispositif d'asservissement, et qui permet en outre avantageusement d'instruire le dispositif d'actionnement, et
- une étape E2 de mise en comparaison des périodes P et Pref, rendue possible par le dispositif de mise en comparaison à au moins un instant t2 donné, qui permet d'établir une valeur de différence VD entre les périodes P et Pref, et
- une troisième étape E3 de sélection d'une raideur prédéterminée du système de rappel élastique parmi notamment 3 raideurs ksr1, ksr2, ksr3, en fonction de la valeur VD, à un instant t3 donné, postérieur à t1 et à t2, sous l'effet du dispositif d'actionnement du dispositif de sélection.
- Comme vu précédemment, les dispositifs d'asservissement, de mise en comparaison et d'actionnement agissent de préférence périodiquement, à savoir à intervalles réguliers. Autrement dit, ces étapes se répètent plus particulièrement à intervalles réguliers. Par exemple, la deuxième étape E2 se répète de manière périodique toutes les minutes ou sensiblement toutes les minutes (première période P1), tandis que les première et troisième étapes E1, E3 se répètent de manière périodique toutes les heures ou sensiblement toutes les heures (deuxième période P2).
- De préférence, le procédé comprend :
- une étape de comparaison de l'heure affichée par le mouvement horloger 2000 et d'une heure de référence, et
- une mise en oeuvre de la deuxième étape d'actionnement en cas de dépassement d'un seuil déterminé lors de l'étape de comparaison.
- En conséquence, la deuxième étape d'actionnement peut n'être mise en oeuvre que lorsque la valeur VD n'est pas comprise dans la plage de tolérance prédéfinie [a ; b] comme évoqué précédemment. L'étape de comparaison est avantageusement mise en oeuvre par le dispositif de mise en comparaison 400.
- En conséquence du système décrit précédemment, l'étape de comparaison peut être mise en oeuvre à intervalle temporel régulier et/ou à intervalle défini par un mouvement horloger 2000, par exemple toutes les minutes ou toutes les heures. En alternative, l'étape de comparaison peut être mise en oeuvre sur requête d'un utilisateur ou porteur de la pièce d'horlogerie. Pour ce faire, l'utilisateur peut agir sur un organe de la pièce d'horlogerie, comme un bouton poussoir qui active le dispositif de mise en comparaison et/ou le dispositif d'actionnement.
- En conséquence du système décrit précédemment, la quatrième étape se produit à intervalle temporel régulier et/ou à intervalle défini par un mouvement horloger 2000, par exemple toutes les heures.
- Comme vu précédemment, la deuxième étape peut comprendre ou consister en une étape de déplacement de la paire de pinces d'immobilisation le long de la lame flexible.
- Grâce aux solutions décrites plus haut, un oscillateur mécanique peut être accéléré ou ralenti en fonction, par exemple, de la position effective du dispositif d'affichage de la montre. Selon le mode de réalisation décrit :
- un dispositif de comptage entretenu par un autre oscillateur, par exemple à quartz, permet d'une part de définir une position de référence du dispositif d'affichage, et
- un dispositif de mise en comparaison électronique permet d'autre part une mise en comparaison entre les positions effective et de référence du dispositif d'affichage,
- Les solutions décrites sont remarquables en ce qu'elles comprennent un dispositif d'asservissement qui permet d'imposer une fréquence prédéterminée f1 d'oscillation à l'oscillateur mécanique grâce à laquelle la pièce d'horlogerie a intrinsèquement une excellente précision. En particulier, ce dispositif d'asservissement est piloté par un rouage, notamment un rouage de finissage qui anime le dispositif d'affichage de la montre, qui est au moins partiellement régulé par ledit oscillateur mécanique. Par ailleurs, ce dispositif d'asservissement pourrait être également piloté par d'autres moyens ou dispositifs, notamment dans le cas d'un mouvement au sein duquel la correction de la marche est effective en amont de la quatrième étape se produisant à intervalle temporel régulier et/ou à intervalle défini. Ainsi, ce dispositif d'asservissement peut être au moins piloté par un rouage, notamment un rouage de finissage.
- Avantageusement, ce dispositif d'asservissement permet d'imposer une fréquence f1 de pivotement à l'oscillateur mécanique, dite « nominale », qui permet un fonctionnement adéquat de l'oscillateur mécanique, et ce indépendamment des autres dispositifs 300, 400, 500, 600. Par ailleurs, selon le mode de réalisation décrit, ce dispositif d'asservissement a également pour avantage de permettre la sélection d'au moins une autre fréquence d'oscillation (f2, f3) de l'oscillateur mécanique, en instruisant le dispositif d'actionnement permettant la sélection d'au moins une autre fréquence d'oscillation.
- Afin d'améliorer la marche de la pièce d'horlogerie, le système réglant comprend un premier oscillateur mécanique dont la fréquence « nominale » peut être modifiée, éventuellement à intervalles réguliers, mais qui peut être rétablie, éventuellement à intervalles réguliers, sous l'effet d'un dispositif d'asservissement piloté par un rouage, notamment un rouage de finissage, qui est au moins partiellement régulé par ledit premier oscillateur mécanique. Par fréquence « nominale » (f1), nous entendons une fréquence du premier oscillateur mécanique déterminée lors de la conception et/ou lors de l'assemblage dudit premier oscillateur afin de parvenir à une précision chronométrique cible lorsque le rouage, en particulier le rouage de finissage, est régulé exclusivement par ledit premier oscillateur. Cet assemblage du premier oscillateur peut par exemple requérir un ajustement ciblé de la raideur, en particulier de la longueur active, d'un élément de rappel du système de rappel élastique prenant part au premier oscillateur, ou encore par un ajustement ciblé de masselottes disposées sur un élément inertiel prenant part au premier au premier oscillateur. La fréquence f1 du système est une fréquence telle que le mouvement horloger et/ou la pièce d'horlogerie peut être certifié, en particulier peut obtenir une certification de chronomètre par le COSC, voire même telle que la pièce d'horlogerie peut obtenir la certification « chronomètre superlatif » de la déposante. Ces certifications peuvent donc être obtenues indépendamment de la mise en oeuvre des solutions décrites plus haut où le mouvement fonctionnerait pendant certaines périodes avec une fréquence du premier oscillateur différente de la fréquence f1.
- Les solutions décrites se distinguent en particulier des documents
EP1158373 etEP1164441 par le fait que le système réglant comprend un premier oscillateur mécanique dont la fréquence f1 peut être modifiée (par le dispositif d'actionnement du dispositif de sélection) mais est ensuite rétablie (par le dispositif d'asservissement du dispositif de sélection), notamment rétablie de façon autonome par un élément directement actionné par le rouage de finissage. - Les solutions décrites se distinguent en particulier des documents
CH6444 CH321947
Claims (16)
- Système réglant (1000), caractérisé en ce que le système réglant comprend :- un premier oscillateur mécanique (100) prévu pour réguler au moins partiellement un rouage (82) d'un mouvement horloger (2000), entraîné par un système moteur (81) ;- un dispositif d'asservissement (600) configuré pour imposer un mode de fonctionnement principal dans lequel le premier oscillateur mécanique (100) oscille à une première fréquence prédéterminée (f1), le dispositif d'asservissement (600) étant piloté par un rouage (82) au moins partiellement régulé par le premier oscillateur (100) ; et- un dispositif d'actionnement (500) configuré pour commander un passage dans un mode de fonctionnement auxiliaire dans lequel le premier oscillateur mécanique (100) oscille à une autre fréquence prédéterminée (f2, f3), différente de la première fréquence (f1).
- Système réglant (1000) selon la revendication 1, caractérisé en ce que le système réglant (1000) comprend un dispositif de sélection de fréquence (300) et en ce que le dispositif d'asservissement (600) et/ou le dispositif d'actionnement (500) agissent sur un dispositif de sélection de fréquence (300) configuré de sorte à définir trois fréquences d'oscillation comme suit :- la première fréquence (f1),- une deuxième fréquence (f2) inférieure à la première fréquence (f1), et- une troisième fréquence (f3) supérieure à la première fréquence (f1).
- Système réglant (1000) selon la revendication 1 ou 2, caractérisé en ce que le premier oscillateur mécanique (100) comprend un élément inertiel (4) et un système de rappel élastique (10) et en ce que les différentes fréquences sont définies par différentes raideurs prédéterminées (ksr1, ksr2, ksr3) du système de rappel élastique (10).
- Système réglant (1000) selon la revendication 3, caractérisé en ce que le dispositif de sélection (300) comprend une paire de pinces (301, 302) déterminant une longueur active, notamment trois longueurs actives, du système de rappel élastique (10).
- Système réglant (1000) selon l'une des revendications précédentes et selon la revendication 2, caractérisé en ce que le dispositif d'actionnement (500) agissant sur le dispositif de sélection (300) est piloté par le dispositif d'asservissement (600).
- Système réglant (1000) selon l'une des revendications précédentes, caractérisé en ce que le système réglant comprend un dispositif de comparaison (400) agencé de sorte à comparer une période de rotation (P) d'un mobile (821) d'un rouage de finissage (82) et une période de référence de rotation (Pref) dudit mobile (821).
- Système réglant (1000) selon l'une des revendications précédentes, caractérisé en ce que le système réglant comprend un dispositif de comptage (200) incluant un deuxième oscillateur (210) présentant une quatrième fréquence (F1) supérieure à la première fréquence (f1).
- Système réglant (1000) selon la revendication précédente, caractérisé en ce que le système réglant comprend un dispositif d'initialisation (800) du dispositif de comptage (200), configuré pour être activé par un mécanisme de réglage (91) d'un dispositif d'affichage (700) d'une pièce d'horlogerie (3000).
- Mouvement horloger (2000) comprenant un système réglant (1000) selon l'une des revendications précédentes et un rouage (82), notamment un rouage de finissage (82).
- Pièce d'horlogerie (3000), notamment montre bracelet, comprenant un système réglant (1000) selon l'une des revendications 1 à 8 et/ou un mouvement selon la revendication précédente.
- Procédé de fonctionnement d'un système réglant (1000) pour mouvement horloger (2000), le système réglant (1000) comprenant un premier oscillateur mécanique (100) prévu pour réguler au moins partiellement un rouage (82) d'un mouvement horloger (2000), entraîné par un système moteur (81), le procédé comprenant au moins une itération des étapes suivantes :- une première étape de fonctionnement selon un mode principal dans lequel le premier oscillateur mécanique (100) oscille à une première fréquence prédéterminée (f1),- une deuxième étape dans laquelle un dispositif d'actionnement (500) modifie la fréquence du premier oscillateur mécanique (100),- une troisième étape de fonctionnement selon un mode auxiliaire dans lequel le premier oscillateur mécanique (100) oscille à une deuxième fréquence (f2) ou à une troisième fréquence (f3),- une quatrième étape dans laquelle un dispositif d'asservissement (600) impose un retour dans le mode de fonctionnement principal, ce dispositif d'asservissement (600) étant piloté par le rouage (82) au moins partiellement régulé par le premier oscillateur (100).
- Procédé de fonctionnement selon la revendication précédente caractérisé en ce que le procédé comprend :- une étape de comparaison de l'heure affichée par un mouvement horloger (2000) et d'une heure de référence, et- une mise en oeuvre de la deuxième étape d'actionnement en cas de dépassement d'un seuil déterminé lors de l'étape de comparaison.
- Procédé de fonctionnement selon la revendication précédente, caractérisé en ce que l'étape de comparaison se produit à intervalle temporel régulier et/ou à intervalle défini par un mouvement horloger (2000).
- Procédé de fonctionnement selon la revendication 12 ou 13, caractérisé en ce que l'étape de comparaison se produit sur requête d'un utilisateur.
- Procédé de fonctionnement selon l'une des revendications 11 à 14, caractérisé en ce que la quatrième étape se produit à intervalle temporel régulier et/ou à intervalle défini par un mouvement horloger (2000).
- Procédé de fonctionnement selon l'une des revendications 11 à 15, caractérisé en ce que la deuxième étape est une étape de déplacement d'une paire de pinces d'immobilisation le long d'une lame flexible et/ou la quatrième étape est une étape de déplacement d'une paire de pinces d'immobilisation le long d'une lame flexible.
Priority Applications (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23213488.2A EP4564106A1 (fr) | 2023-11-30 | 2023-11-30 | Système réglant pour une pièce d'horlogerie |
| PCT/EP2023/087924 WO2024141601A1 (fr) | 2022-12-28 | 2023-12-28 | Système réglant pour mouvement horloger |
| CN202380093744.XA CN120677443A (zh) | 2022-12-28 | 2023-12-28 | 用于钟表机芯的调节系统 |
| PCT/EP2023/087923 WO2024141600A1 (fr) | 2022-12-28 | 2023-12-28 | Système réglant pour mouvement horloger |
| EP23838147.9A EP4643187A1 (fr) | 2022-12-28 | 2023-12-28 | Système réglant pour mouvement horloger |
| EP23838146.1A EP4643186A1 (fr) | 2022-12-28 | 2023-12-28 | Système réglant pour mouvement horloger |
| JP2025538241A JP2026500431A (ja) | 2022-12-28 | 2023-12-28 | 時計ムーブメントの調速システム |
| JP2024206159A JP2025088753A (ja) | 2023-11-30 | 2024-11-27 | 時計の調速システム |
| US18/961,765 US20250181036A1 (en) | 2023-11-30 | 2024-11-27 | Regulating system for a timepiece |
| CN202411740104.6A CN120065674A (zh) | 2023-11-30 | 2024-11-29 | 用于钟表的调校系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23213488.2A EP4564106A1 (fr) | 2023-11-30 | 2023-11-30 | Système réglant pour une pièce d'horlogerie |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4564106A1 true EP4564106A1 (fr) | 2025-06-04 |
Family
ID=89029736
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23213488.2A Pending EP4564106A1 (fr) | 2022-12-28 | 2023-11-30 | Système réglant pour une pièce d'horlogerie |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20250181036A1 (fr) |
| EP (1) | EP4564106A1 (fr) |
| JP (1) | JP2025088753A (fr) |
| CN (1) | CN120065674A (fr) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH6444A (fr) | 1893-04-21 | 1893-08-15 | Amez Droz Louis Frederic | Nouveau système de régulateur pour échappements |
| CH109521A (fr) | 1924-07-16 | 1925-04-01 | Aegler S A Rolex Watch Co | Dispositif régulateur de mouvement de montre. |
| CH321947A (fr) | 1955-08-20 | 1957-05-31 | Etienne Fernand | Dispositif de réglage de la position de la raquette d'une pièce d'horlogerie |
| EP1158373A1 (fr) | 1999-12-24 | 2001-11-28 | Seiko Instruments Inc. | Horloge mecanique comportant un mecanisme d'actionnement de regulateur |
| EP1164441A1 (fr) | 1999-12-24 | 2001-12-19 | Seiko Instruments Inc. | Montre mecanique avec unite de commande de rouage |
| CH711303A1 (fr) * | 2015-07-09 | 2017-01-13 | Soprod Sa | Dispositif de correction pour un mouvement horloger mécanique. |
| EP3120199A2 (fr) | 2014-03-21 | 2017-01-25 | Hublot S.A., Genève | Organe tournant horloger, oscillateur horloger |
| EP3629103A1 (fr) * | 2018-09-28 | 2020-04-01 | The Swatch Group Research and Development Ltd | Pièce d'horlogerie comprenant un mouvement mécanique dont la marche est régulée par un dispositif électronique |
| EP3842876A1 (fr) * | 2019-12-24 | 2021-06-30 | The Swatch Group Research and Development Ltd | Piece d horlogerie munie d'un mouvement mecanique et d'un dispositif de correction d'une heure affichee |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3339982B1 (fr) * | 2016-12-23 | 2021-08-25 | The Swatch Group Research and Development Ltd | Régulation par freinage mécanique d'un oscillateur mécanique horloger |
-
2023
- 2023-11-30 EP EP23213488.2A patent/EP4564106A1/fr active Pending
-
2024
- 2024-11-27 JP JP2024206159A patent/JP2025088753A/ja active Pending
- 2024-11-27 US US18/961,765 patent/US20250181036A1/en active Pending
- 2024-11-29 CN CN202411740104.6A patent/CN120065674A/zh active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH6444A (fr) | 1893-04-21 | 1893-08-15 | Amez Droz Louis Frederic | Nouveau système de régulateur pour échappements |
| CH109521A (fr) | 1924-07-16 | 1925-04-01 | Aegler S A Rolex Watch Co | Dispositif régulateur de mouvement de montre. |
| CH321947A (fr) | 1955-08-20 | 1957-05-31 | Etienne Fernand | Dispositif de réglage de la position de la raquette d'une pièce d'horlogerie |
| EP1158373A1 (fr) | 1999-12-24 | 2001-11-28 | Seiko Instruments Inc. | Horloge mecanique comportant un mecanisme d'actionnement de regulateur |
| EP1164441A1 (fr) | 1999-12-24 | 2001-12-19 | Seiko Instruments Inc. | Montre mecanique avec unite de commande de rouage |
| EP3120199A2 (fr) | 2014-03-21 | 2017-01-25 | Hublot S.A., Genève | Organe tournant horloger, oscillateur horloger |
| CH711303A1 (fr) * | 2015-07-09 | 2017-01-13 | Soprod Sa | Dispositif de correction pour un mouvement horloger mécanique. |
| EP3629103A1 (fr) * | 2018-09-28 | 2020-04-01 | The Swatch Group Research and Development Ltd | Pièce d'horlogerie comprenant un mouvement mécanique dont la marche est régulée par un dispositif électronique |
| EP3842876A1 (fr) * | 2019-12-24 | 2021-06-30 | The Swatch Group Research and Development Ltd | Piece d horlogerie munie d'un mouvement mecanique et d'un dispositif de correction d'une heure affichee |
Also Published As
| Publication number | Publication date |
|---|---|
| US20250181036A1 (en) | 2025-06-05 |
| JP2025088753A (ja) | 2025-06-11 |
| CN120065674A (zh) | 2025-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2453322B1 (fr) | Correcteur rapide d'indicateur d'une grandeur temporelle pour pièce d'horlogerie | |
| WO2018095997A2 (fr) | Resonateur rotatif a guidage flexible entretenu par un echappement libre a ancre | |
| EP3435176B1 (fr) | Lissage de couple pour pièce d'horlogerie avec mécanisme de sonnerie, notamment avec mécanisme de sonnerie | |
| EP3037894B1 (fr) | Mécanisme et procédé de réglage d une vitesse dans un mouvement horloger | |
| EP3599516B1 (fr) | Tourbillon ou carrousel retrograde d'horlogerie | |
| EP2613205A2 (fr) | Organe réglant pour montre ou chronographe | |
| EP3059642A1 (fr) | Mécanisme de chronographe | |
| CH710925A2 (fr) | Mécanisme d'échappement. | |
| CH713530A2 (fr) | Echappement, mouvement de pièce d'horlogerie et pièce d'horlogerie. | |
| EP4564106A1 (fr) | Système réglant pour une pièce d'horlogerie | |
| EP3599517A1 (fr) | Tourbillon ou carrousel retrograde d'horlogerie | |
| EP2802941B1 (fr) | Organe réglant pour chronographe mécanique | |
| EP3825780A1 (fr) | Régulateur mécanique horloger comportant un échappement à force constante | |
| EP4432020A1 (fr) | Mouvement horloger | |
| CH705967A1 (fr) | Organe réglant pour montre ou chronographe. | |
| CH705970B1 (fr) | Mécanisme d'horlogerie comprenant un oscillateur vibrant. | |
| EP3671360A1 (fr) | Remontoir a systeme pare-chocs | |
| CH715196A2 (fr) | Mouvement d'horlogerie comportant un bras porteur d'un satellite que comporte un tourbillon ou carrousel. | |
| EP3599515A1 (fr) | Mecanisme d'entrainement d'horlogerie | |
| EP4390574A1 (fr) | Mecanisme de chronographe pour mouvement d'horlogerie et piece d'horlogerie comportant un tel mecanisme | |
| EP4421567A1 (fr) | Mecanisme de déclenchement d'un mécanisme horloger et pièce d' horlogerie comprenant un tel mécanisme de déclenchement | |
| EP3822711A1 (fr) | Mécanisme horloger comprenant un mobile menant travaillant avec un mobile mené | |
| CH720361A2 (fr) | Mécanisme de chronographe pour mouvement d'horlogerie | |
| EP4390555A1 (fr) | Mecanisme d'echappement a force constante pour mouvement horloger | |
| CH705969A1 (fr) | Organe réglant pour montre ou chronographe. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Free format text: CASE NUMBER: UPC_APP_8162_4564106/2025 Effective date: 20250927 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20251202 |