JP2004222020A - Δς変調型a/d変換器の出力信号平滑方法とその平滑回路 - Google Patents
Δς変調型a/d変換器の出力信号平滑方法とその平滑回路 Download PDFInfo
- Publication number
- JP2004222020A JP2004222020A JP2003007881A JP2003007881A JP2004222020A JP 2004222020 A JP2004222020 A JP 2004222020A JP 2003007881 A JP2003007881 A JP 2003007881A JP 2003007881 A JP2003007881 A JP 2003007881A JP 2004222020 A JP2004222020 A JP 2004222020A
- Authority
- JP
- Japan
- Prior art keywords
- data
- converter
- sampling data
- value
- modulation type
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Compression, Expansion, Code Conversion, And Decoders (AREA)
Abstract
【課題】回路規模が大きくなったり制御性能が劣化したり入力範囲が狭くなるなどの不具合を生じることなしに、ΔΣ変調型A/D変換器の出力ノイズを除去できるようにすることにある。
【解決手段】ΔΣ変調型A/D変換器が出力する3以上連続したサンプリングデータの中の1つの値が他とは異なり、且つ連続する前記サンプリングデータの変化パターンが所定パターンと一致すれば、他とは異なるサンプリングデータの値を残余のサンプリングデータと同値に修正する。
この所定パターンとは、3以上連続したサンプリングデータの2番目データが1番目データとは異なる値で、且つ3番目データが1番目データと同値となるパターンであり、このとき2番目データの値を修正する。
【選択図】 図2
【解決手段】ΔΣ変調型A/D変換器が出力する3以上連続したサンプリングデータの中の1つの値が他とは異なり、且つ連続する前記サンプリングデータの変化パターンが所定パターンと一致すれば、他とは異なるサンプリングデータの値を残余のサンプリングデータと同値に修正する。
この所定パターンとは、3以上連続したサンプリングデータの2番目データが1番目データとは異なる値で、且つ3番目データが1番目データと同値となるパターンであり、このとき2番目データの値を修正する。
【選択図】 図2
Description
【0001】
【発明の属する技術分野】
この発明は、ΔΣ変調型A/D変換器が出力するデータを平滑にするΔΣ変調型A/D変換器の出力信号平滑方法とその平滑回路に関する。
【0002】
【従来の技術】
例えば電動機をディジタル量により制御すれば、従来のアナログ量による制御に比べて遙に高速度で高精度の制御が期待できるので、ディジタル制御が多用されるようになって来ている。しかしながら電動機から検出される電圧や電流などのデータはアナログ量であるから、ディジタル制御をするにはこれらのアナログデータをディジタルデータに変換する必要があり、そのためにA/D変換器を使用する。ところで電動機を高精度で制御しようとすると、例えば10ビット以上のA/D変換器が必要であり、大ビットのA/D変換器は回路が複雑で大形化するし、価格も上昇してしまう欠点がある。そこで高精度を維持しながら回路構成を簡略化できるA/D変換器として、ΔΣ変調型A/D変換器が多用されるようになってきている。
【0003】
図9は永久磁石電動機をディジタル制御する場合の回路構成の一般例を示したブロック回路図である。この図9において、符号1は永久磁石電動機(以下ではIPMモータと略記する)6の回転速度を制御する速度制御器、符号2は比例積分制御によりIPMモータ6へ印加する電圧を制御するPI制御器、符号3はIPMモータ6の直交するdq座標軸上の電圧指令を三相電圧指令に変換するUVW変換器、符号4は電圧指示値に従ったパルス幅変調波形を発生するために三角波形との比較を行う比較器、符号7はその三角波を発生する三角波発生器、符号5はIPMモータ6を駆動するインバータ、符号8はIPMモータ6の回転位置を検出する位置検出器、符号9はIPMモータ6からアナログ量で検出される各相電流をディジタル量に変換するΔΣ変調型A/D変換器であり、このΔΣ変調型A/D変換器9で変換されたディジタル量の各相電流は、座標変換器10で直交するdq座標に変換される。
【0004】
図8は図9に記載している従来のΔΣ変調型A/D変換器の構成を示したブロック回路図である。従来のΔΣ変調型A/D変換器9の動作を以下で簡単に説明する。図8において、差動アンプ11はアナログ入力信号Vi (信号範囲は0〜1とする)と1ビットD/A変換器15からの出力との差を演算する。この差動アンプ11の出力は積分器12に入力されるが、アナログ入力信号Vi が1ビットD/A変換器15の出力よりも大ならば当該積分器12の出力を増大させるし、この大小関係が逆ならば積分器12の出力を減少させる。この積分器12の出力と別途に定めるレベル0.5との大小関係を比較器13で比較するが、積分器12の出力のほうが大ならば比較器13は1を出力し、積分器12の出力のほうが小さければ比較器13は零を出力する。この比較器13の出力データがサンプリングクロックによりラッチされ、サンプリング周波数の1周期の期間、遅延器14に保持される。このラッチされた信号が1ビットD/A変換器15の入力となり、差動アンプ11は前述したアナログ入力信号Vi との差の演算を行う。ディジタルフィルタ16を介して得られる比較器13の出力が、当該ΔΣ変調型A/D変換器9の出力である。
【0005】
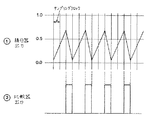
図10は図8に示しているΔΣ変調型A/D変換器へのアナログ入力信号Vi が1/3の場合の動作を示した動作波形図であって、図10▲1▼は積分器12の出力信号の変化、図10▲2▼は比較器13の出力信号の変化をそれぞれが示しており、アナログ入力信号Vi が1/3の場合は、サンプリングクロック3回に1回の割合で比較器13からは1なる波形が出力(図10▲2▼参照)される。
図11は図8に示しているΔΣ変調型A/D変換器へのアナログ入力信号Vi が4/7の場合の動作を示した動作波形図であって、図11▲1▼は積分器12の出力信号の変化、図11▲2▼は比較器13の出力信号の変化をそれぞれが示しており、アナログ入力信号Vi が4/7の場合は、サンプリングクロック7回に4回の割合で比較器13からは1なる波形が出力(図11▲2▼参照)される。
【0006】
比較器13(図8参照)の出力信号が即ちΔΣ変調型A/D変換器9の出力信号であって、その出力波形は例えば図10▲2▼,あるいは図11▲2▼で示されるが、これを出力側に設けているディジタルフィルタ16で処理する。尤も簡単なフィルタ処理としては、一定のサンプリングクロック(一定とは2n であり,例えばn=8ならば256)で1を何回出力したかをカウントし、これをディジタル出力値として使用する。この一定回数のサンプリングクロック間隔がA/D変換時間となる。
しかし、アナログ入力値を分数で表したときの分母の値と、A/D変換周期のサンプリングクロック数とが割り切れない関係にある場合は、A/D変換値が一定しないという現象が現れる。これは量子化ノイズあるいはパターンノイズと呼ばれる。例えばサンプリングクロック間隔が256回でアナログ入力信号Vi =1/3の場合のA/D変換値は、85,85,86,85,85,86,85,・・・となり、A/D変換の3回に1回の割合で他の2回とは異なる値を出力する。すなわち入力値が一定であるにもかかわらず出力値が変動する不具合を生じてしまう。
【0007】
例えば図9で既述の電動機制御回路で、IPMモータ6に結合している負荷(図示は省略)が発生するトルクに対抗してIPMモータ6に電流を流すことにより、当該IPMモータ6を所定の停止位置に静止させる場合に、ΔΣ変調型A/D変換器9に前述した出力変動が現れると、当該IPMモータ6を所定位置で静止させることが困難になる不具合を生じてしまう。そこで前述したノイズを除去する手段として、従来はΔΣ変調型A/D変換器9の出力側に次数の高いディジタルフィルタ16を追加する。あるいは、この高次のディジタルフィルタ16の代わりに、小振幅で一定周期波形のディザ信号をA/D変換入力に入れることでノイズスペクトラムを分散させる,などの対策を行うことになる(たとえば、特許文献1参照。)。
【0008】
【特許文献1】
特開平6−104751号公報
【0009】
【発明が解決しようとする課題】
ΔΣ変調型A/D変換器の出力側に高次のディジタルフィルタ16を追加することで出力信号に含まれるノイズを除去しようとすると、回路規模が大きくなってしまう欠点があるばかりだけではなく、フィルタの特性上からステップ入力に対する応答の遅れが増大する欠点があるから、例えば図9に図示のような電動機制御回路に使用するならば、サーボシステム全体の制御特性を劣化させてしまう不具合を生じることになる。
また、A/D変換入力にディザ信号を入れようとすると、ディザ発生回路を追加設置する必要があり、これも回路規模を増大させてしまう不具合があるし、このディザ信号の振幅分だけΔΣ変調型A/D変換器の入力範囲が狭くなってしまう欠点もある。
【0010】
そこでこの発明の目的は、回路規模が大きくなったり制御性能が劣化したり入力範囲が狭くなるなどの不具合を生じることなしに、ΔΣ変調型A/D変換器の出力ノイズを除去できるようにすることにある。
【0011】
【課題を解決するための手段】
前記の目的を達成するために、この発明のΔΣ変調型A/D変換器の出力信号平滑方法とその平滑回路は、
ΔΣ変調型A/D変換器が出力する3またはそれ以上の連続したサンプリングデータを検出し、当該連続するサンプリングデータの中の1つの値が他とは異なり、且つ連続する前記サンプリングデータの変化パターンが予め定めたパターンと一致するとき、他とは異なる前記サンプリングデータの値を残余のサンプリングデータと同じ値に修正する。
【0012】
この予め定めたパターンとは、3またはそれ以上の連続したサンプリングデータにおける第2サンプリングデータが第1サンプリングデータとは異なる値であり、且つ第3サンプリングデータが前記第1サンプリングデータと同じ値となるパターンであり、このとき第2サンプリングデータの値を第1または第3サンプリングデータと同じ値に修正する。
ΔΣ変調型A/D変換器の出力側に接続したデシメーションフィルタと、このデシメーションフィルタが出力する3またはそれ以上の連続したサンプリングデータを別個にラッチする複数のデータラッチ回路と、各データラッチ回路がラッチしたサンプリングデータの尤もらしさの有無を判定する最尤判定回路と、尤もらしいデータへの修正を行う最尤復号回路と、を備えるものとする。
【0013】
【発明の実施の形態】
図1は本発明の第1実施例を表したフローチャートである。図1において、3つ以上連続しているサンプリングデータを順次ラッチ(処理21)し、このラッチしたサンプリングデータの値をチェック(処理22)する。各サンプリングデータの中で1つだけ他と異なる値がある(判断26)場合は、更にこの連続したデータの変化のパターンと、予め定めた所定パターンとを比較(処理23)し、所定のパターンと一致(判断27)している場合は、前記の1つだけ他と異なる値を呈するサンプリングデータはノイズであると判断し、これを修正する。
【0014】
図2は本発明の第2実施例を表したフローチャートであって、連続した3つのサンプリングデータからノイズの有無の判定と修正を行う場合を表している。すなわち、連続している第1,第2,第3サンプリングデータを順次ラッチ(処理31,32,33)し、先ず第1サンプリングデータと第2サンプリングデータを比較(処理34)する。この両者が同値でなければ(判断41)、次に第2サンプリングデータと第3サンプリングデータを比較(処理35)し、この両者が同値でなければ(判断42)、更に第3サンプリングデータと第1サンプリングデータを比較(処理36)する。この両者が同値である(判断43)ならば、第2サンプリングデータが第1,第3データとは異なる値であり、且つデータの変化パターンが所定のパターンと一致することから、当該第2サンプリングデータはノイズであると判定し、これを修正する。
【0015】
図3は連続した3つのサンプリングデータが変化するパターンを表したパターン変化図であって、パターンAは各データが一定している場合、パターンBはデータが増大した後に一定した場合、パターンCはデータが減少した後に一定した場合、パターンDは一定していたデータが増大した場合、パターンEは一定していたデータが減少した場合、パターンFは各データが順次増大した場合、パターンGは各データが順次減少した場合、パターンHはデータが減少した後に元の値に戻った場合、パターンJはデータが増大した後に元の値に戻った場合、をそれぞれが表している。
【0016】
図3に図示の各パターンの中で、パターンHとJの変化は、前述したサンプリングクロック間隔が256回でアナログ入力信号Vi =1/3の場合に、A/D変換値は、85,85,86,85,85,86,85・・・となって、アナログ入力信号Vi が一定値であるにもかかわらず、3回に1回の割合で他の2回とは異なる値を出力するのに相当している。すなわち、これがノイズに相当する変化パターンである。よってこのパターンHまたはパターンJと一致したパターンが現れた場合に、他とは異なる値を呈する第2サンプリングデータをノイズと判定する。
【0017】
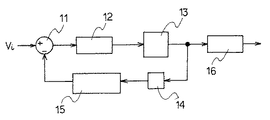
図4は本発明の第3実施例を表したブロック回路図であるが、この図4に記載の差動アンプ11,積分器12,比較器13,遅延器14および1ビットD/A変換器15の名称・用途・機能は図8で既述の回路図と同じであり、ディジタルフィルタ51のみが異なる。よって以下ではディジタルフィルタ51についてのみ説明する。
図5は図4に記載のディジタルフィルタの構成を表した本発明の第3実施例回路図であって、ディジタルフィルタ51はデシメーションフィルタ53と最尤復号回路54で構成している。デシメーションフィルタ53の特性は下記の数式1で表され、256サンプル点の平均をとりながら、256サンプル毎にデータの間引きを行い、オーバサンプリング周波数から最終的なサンプリング周波数でA/D変換を実行する。
【0018】
【数1】
H(z) =(1+z−1+z−2+z−3・・・・・・・+z−256)/256
このデシメーションフィルタ53の出力値には、アナログ入力が一定値の場合には前述したように、量子化ノイズが重畳する。この量子化ノイズの大きさはデシメーションフィルタ53の出力刻み幅となる。ここではΔΣ変調型A/D変換器の出力は零または1のいずれかの値であり、デシメーションフィルタ53により256サンプル点の平均化処理を行っているので、刻み幅は1/256となる。そのため量子化ノイズの瞬時振幅は±1/256となる。このデシメーションフィルタ53の出力は、次段の最尤復号回路54へ送られる。
【0019】
図6は図5に図示の最尤復号回路の構成を表した本発明の第3実施例回路図である。最尤復号回路54は、A/D変換サンプリング周波数でデータが順次送られて保持される第1データラッチ56,第2データラッチ57,第3データラッチ58と最尤復号判定部59で構成されていて、デシメーションフィルタ53から送られて保持されたデータのパターンを最尤復号判定部59で判定し、図3で既述のパターンHまたはパターンJの発生の有無をチェックし、このパターンが発生すればパターンAに修正したものを出力する。また、パターンA〜Gは修正処理は行わずに、そのまま出力する。
【0020】
なお、本発明のディジタルフィルタ51を含んだΔΣ変調型A/D変換器を使用している装置(例えば図9の電動機制御回路)では、その制御や各種の信号処理をCPUで行っている場合は、最尤復号回路54が行うべき処理をこのCPUに代行させることができるのは勿論である。
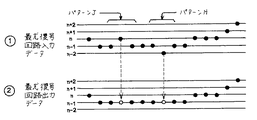
図7はΔΣ変調型A/D変換器に発生した量子化ノイズを本発明の最尤復号回路で修正した状況を表したディジタルデータ図であって、図7▲1▼は最尤復号回路54へ入力するディジタルデータの変化、図7▲2▼は最尤復号回路54から出力するディジタルデータの変化をあらわしている。この図7で明らかなように、パターンHとパターンJを検出し、量子化ノイズに相当するデータを矢印で図示のように修正している。
【0021】
【発明の効果】
従来のΔΣ変調型A/D変換器では、これに入力するアナログ信号が一定値の場合に、そのディジタル出力信号に量子化ノイズが重畳する不具合を生じることがあるので、高次のディジタルフィルタを使用したり、ディザ信号を入れるなどの対策を講じるのであるが、そのために回路規模が大きくなるし、制御応答性能が低下したり、ΔΣ変調型A/D変換器の入力範囲が狭くなるなどの不都合があった。これに対して本発明では、デシメーションフィルタと最尤復号回路を備えることにより、連続する3以上のサンプリングデータの変化パターンから量子化ノイズが含まれているパターンのチェックと修正を行うので、回路規模が大きくなるのを抑制すると共に、制御応答性能の低下を回避できるし、入力範囲を狭くしない効果も得られる。更に、当該ΔΣ変調型A/D変換器を適用している装置の制御にCPUを使用している場合は、このCPUを使って最尤復号回路の動作を代行させることができるので、回路規模の拡大をより一層抑制できる効果も得られる。
【図面の簡単な説明】
【図1】本発明の第1実施例を表したフローチャート
【図2】本発明の第2実施例を表したフローチャート
【図3】連続した3つのサンプリングデータが変化するパターンを表したパターン変化図
【図4】本発明の第3実施例を表したブロック回路図
【図5】図4に記載のディジタルフィルタの構成を表した本発明の第3実施例回路図
【図6】図5に図示の最尤復号回路の構成を表した本発明の第3実施例回路図
【図7】ΔΣ変調型A/D変換器に発生した量子化ノイズを本発明の最尤復号回路で修正した状況を表したディジタルデータ図
【図8】図9に記載している従来のΔΣ変調型A/D変換器の構成を示したブロック回路図
【図9】永久磁石電動機をディジタル制御する場合の回路構成の一般例を示したブロック回路図
【図10】図8に示しているΔΣ変調型A/D変換器へのアナログ入力信号Vi が1/3の場合の動作を示した動作波形図
【図11】図8に示しているΔΣ変調型A/D変換器へのアナログ入力信号Vi が4/7の場合の動作を示した動作波形図
【符号の説明】
1 速度制御器
2 PI制御器
3 UVW変換器
4 比較器
5 インバータ
6 IPMモータ
7 三角波発生器
8 位置検出器
9 ΔΣ変調型A/D変換器
10 座標変換器
11 差動アンプ
12 積分器
13 比較器
14 遅延器
15 1ビットD/A変換器
16,51 ディジタルフィルタ
21〜24,31〜37 処理
26,27,41〜43 判断
53 デシメーションフィルタ
54 最尤復号回路
56 第1データラッチ
57 第2データラッチ
58 第3データラッチ
59 最尤復号判定部
【発明の属する技術分野】
この発明は、ΔΣ変調型A/D変換器が出力するデータを平滑にするΔΣ変調型A/D変換器の出力信号平滑方法とその平滑回路に関する。
【0002】
【従来の技術】
例えば電動機をディジタル量により制御すれば、従来のアナログ量による制御に比べて遙に高速度で高精度の制御が期待できるので、ディジタル制御が多用されるようになって来ている。しかしながら電動機から検出される電圧や電流などのデータはアナログ量であるから、ディジタル制御をするにはこれらのアナログデータをディジタルデータに変換する必要があり、そのためにA/D変換器を使用する。ところで電動機を高精度で制御しようとすると、例えば10ビット以上のA/D変換器が必要であり、大ビットのA/D変換器は回路が複雑で大形化するし、価格も上昇してしまう欠点がある。そこで高精度を維持しながら回路構成を簡略化できるA/D変換器として、ΔΣ変調型A/D変換器が多用されるようになってきている。
【0003】
図9は永久磁石電動機をディジタル制御する場合の回路構成の一般例を示したブロック回路図である。この図9において、符号1は永久磁石電動機(以下ではIPMモータと略記する)6の回転速度を制御する速度制御器、符号2は比例積分制御によりIPMモータ6へ印加する電圧を制御するPI制御器、符号3はIPMモータ6の直交するdq座標軸上の電圧指令を三相電圧指令に変換するUVW変換器、符号4は電圧指示値に従ったパルス幅変調波形を発生するために三角波形との比較を行う比較器、符号7はその三角波を発生する三角波発生器、符号5はIPMモータ6を駆動するインバータ、符号8はIPMモータ6の回転位置を検出する位置検出器、符号9はIPMモータ6からアナログ量で検出される各相電流をディジタル量に変換するΔΣ変調型A/D変換器であり、このΔΣ変調型A/D変換器9で変換されたディジタル量の各相電流は、座標変換器10で直交するdq座標に変換される。
【0004】
図8は図9に記載している従来のΔΣ変調型A/D変換器の構成を示したブロック回路図である。従来のΔΣ変調型A/D変換器9の動作を以下で簡単に説明する。図8において、差動アンプ11はアナログ入力信号Vi (信号範囲は0〜1とする)と1ビットD/A変換器15からの出力との差を演算する。この差動アンプ11の出力は積分器12に入力されるが、アナログ入力信号Vi が1ビットD/A変換器15の出力よりも大ならば当該積分器12の出力を増大させるし、この大小関係が逆ならば積分器12の出力を減少させる。この積分器12の出力と別途に定めるレベル0.5との大小関係を比較器13で比較するが、積分器12の出力のほうが大ならば比較器13は1を出力し、積分器12の出力のほうが小さければ比較器13は零を出力する。この比較器13の出力データがサンプリングクロックによりラッチされ、サンプリング周波数の1周期の期間、遅延器14に保持される。このラッチされた信号が1ビットD/A変換器15の入力となり、差動アンプ11は前述したアナログ入力信号Vi との差の演算を行う。ディジタルフィルタ16を介して得られる比較器13の出力が、当該ΔΣ変調型A/D変換器9の出力である。
【0005】
図10は図8に示しているΔΣ変調型A/D変換器へのアナログ入力信号Vi が1/3の場合の動作を示した動作波形図であって、図10▲1▼は積分器12の出力信号の変化、図10▲2▼は比較器13の出力信号の変化をそれぞれが示しており、アナログ入力信号Vi が1/3の場合は、サンプリングクロック3回に1回の割合で比較器13からは1なる波形が出力(図10▲2▼参照)される。
図11は図8に示しているΔΣ変調型A/D変換器へのアナログ入力信号Vi が4/7の場合の動作を示した動作波形図であって、図11▲1▼は積分器12の出力信号の変化、図11▲2▼は比較器13の出力信号の変化をそれぞれが示しており、アナログ入力信号Vi が4/7の場合は、サンプリングクロック7回に4回の割合で比較器13からは1なる波形が出力(図11▲2▼参照)される。
【0006】
比較器13(図8参照)の出力信号が即ちΔΣ変調型A/D変換器9の出力信号であって、その出力波形は例えば図10▲2▼,あるいは図11▲2▼で示されるが、これを出力側に設けているディジタルフィルタ16で処理する。尤も簡単なフィルタ処理としては、一定のサンプリングクロック(一定とは2n であり,例えばn=8ならば256)で1を何回出力したかをカウントし、これをディジタル出力値として使用する。この一定回数のサンプリングクロック間隔がA/D変換時間となる。
しかし、アナログ入力値を分数で表したときの分母の値と、A/D変換周期のサンプリングクロック数とが割り切れない関係にある場合は、A/D変換値が一定しないという現象が現れる。これは量子化ノイズあるいはパターンノイズと呼ばれる。例えばサンプリングクロック間隔が256回でアナログ入力信号Vi =1/3の場合のA/D変換値は、85,85,86,85,85,86,85,・・・となり、A/D変換の3回に1回の割合で他の2回とは異なる値を出力する。すなわち入力値が一定であるにもかかわらず出力値が変動する不具合を生じてしまう。
【0007】
例えば図9で既述の電動機制御回路で、IPMモータ6に結合している負荷(図示は省略)が発生するトルクに対抗してIPMモータ6に電流を流すことにより、当該IPMモータ6を所定の停止位置に静止させる場合に、ΔΣ変調型A/D変換器9に前述した出力変動が現れると、当該IPMモータ6を所定位置で静止させることが困難になる不具合を生じてしまう。そこで前述したノイズを除去する手段として、従来はΔΣ変調型A/D変換器9の出力側に次数の高いディジタルフィルタ16を追加する。あるいは、この高次のディジタルフィルタ16の代わりに、小振幅で一定周期波形のディザ信号をA/D変換入力に入れることでノイズスペクトラムを分散させる,などの対策を行うことになる(たとえば、特許文献1参照。)。
【0008】
【特許文献1】
特開平6−104751号公報
【0009】
【発明が解決しようとする課題】
ΔΣ変調型A/D変換器の出力側に高次のディジタルフィルタ16を追加することで出力信号に含まれるノイズを除去しようとすると、回路規模が大きくなってしまう欠点があるばかりだけではなく、フィルタの特性上からステップ入力に対する応答の遅れが増大する欠点があるから、例えば図9に図示のような電動機制御回路に使用するならば、サーボシステム全体の制御特性を劣化させてしまう不具合を生じることになる。
また、A/D変換入力にディザ信号を入れようとすると、ディザ発生回路を追加設置する必要があり、これも回路規模を増大させてしまう不具合があるし、このディザ信号の振幅分だけΔΣ変調型A/D変換器の入力範囲が狭くなってしまう欠点もある。
【0010】
そこでこの発明の目的は、回路規模が大きくなったり制御性能が劣化したり入力範囲が狭くなるなどの不具合を生じることなしに、ΔΣ変調型A/D変換器の出力ノイズを除去できるようにすることにある。
【0011】
【課題を解決するための手段】
前記の目的を達成するために、この発明のΔΣ変調型A/D変換器の出力信号平滑方法とその平滑回路は、
ΔΣ変調型A/D変換器が出力する3またはそれ以上の連続したサンプリングデータを検出し、当該連続するサンプリングデータの中の1つの値が他とは異なり、且つ連続する前記サンプリングデータの変化パターンが予め定めたパターンと一致するとき、他とは異なる前記サンプリングデータの値を残余のサンプリングデータと同じ値に修正する。
【0012】
この予め定めたパターンとは、3またはそれ以上の連続したサンプリングデータにおける第2サンプリングデータが第1サンプリングデータとは異なる値であり、且つ第3サンプリングデータが前記第1サンプリングデータと同じ値となるパターンであり、このとき第2サンプリングデータの値を第1または第3サンプリングデータと同じ値に修正する。
ΔΣ変調型A/D変換器の出力側に接続したデシメーションフィルタと、このデシメーションフィルタが出力する3またはそれ以上の連続したサンプリングデータを別個にラッチする複数のデータラッチ回路と、各データラッチ回路がラッチしたサンプリングデータの尤もらしさの有無を判定する最尤判定回路と、尤もらしいデータへの修正を行う最尤復号回路と、を備えるものとする。
【0013】
【発明の実施の形態】
図1は本発明の第1実施例を表したフローチャートである。図1において、3つ以上連続しているサンプリングデータを順次ラッチ(処理21)し、このラッチしたサンプリングデータの値をチェック(処理22)する。各サンプリングデータの中で1つだけ他と異なる値がある(判断26)場合は、更にこの連続したデータの変化のパターンと、予め定めた所定パターンとを比較(処理23)し、所定のパターンと一致(判断27)している場合は、前記の1つだけ他と異なる値を呈するサンプリングデータはノイズであると判断し、これを修正する。
【0014】
図2は本発明の第2実施例を表したフローチャートであって、連続した3つのサンプリングデータからノイズの有無の判定と修正を行う場合を表している。すなわち、連続している第1,第2,第3サンプリングデータを順次ラッチ(処理31,32,33)し、先ず第1サンプリングデータと第2サンプリングデータを比較(処理34)する。この両者が同値でなければ(判断41)、次に第2サンプリングデータと第3サンプリングデータを比較(処理35)し、この両者が同値でなければ(判断42)、更に第3サンプリングデータと第1サンプリングデータを比較(処理36)する。この両者が同値である(判断43)ならば、第2サンプリングデータが第1,第3データとは異なる値であり、且つデータの変化パターンが所定のパターンと一致することから、当該第2サンプリングデータはノイズであると判定し、これを修正する。
【0015】
図3は連続した3つのサンプリングデータが変化するパターンを表したパターン変化図であって、パターンAは各データが一定している場合、パターンBはデータが増大した後に一定した場合、パターンCはデータが減少した後に一定した場合、パターンDは一定していたデータが増大した場合、パターンEは一定していたデータが減少した場合、パターンFは各データが順次増大した場合、パターンGは各データが順次減少した場合、パターンHはデータが減少した後に元の値に戻った場合、パターンJはデータが増大した後に元の値に戻った場合、をそれぞれが表している。
【0016】
図3に図示の各パターンの中で、パターンHとJの変化は、前述したサンプリングクロック間隔が256回でアナログ入力信号Vi =1/3の場合に、A/D変換値は、85,85,86,85,85,86,85・・・となって、アナログ入力信号Vi が一定値であるにもかかわらず、3回に1回の割合で他の2回とは異なる値を出力するのに相当している。すなわち、これがノイズに相当する変化パターンである。よってこのパターンHまたはパターンJと一致したパターンが現れた場合に、他とは異なる値を呈する第2サンプリングデータをノイズと判定する。
【0017】
図4は本発明の第3実施例を表したブロック回路図であるが、この図4に記載の差動アンプ11,積分器12,比較器13,遅延器14および1ビットD/A変換器15の名称・用途・機能は図8で既述の回路図と同じであり、ディジタルフィルタ51のみが異なる。よって以下ではディジタルフィルタ51についてのみ説明する。
図5は図4に記載のディジタルフィルタの構成を表した本発明の第3実施例回路図であって、ディジタルフィルタ51はデシメーションフィルタ53と最尤復号回路54で構成している。デシメーションフィルタ53の特性は下記の数式1で表され、256サンプル点の平均をとりながら、256サンプル毎にデータの間引きを行い、オーバサンプリング周波数から最終的なサンプリング周波数でA/D変換を実行する。
【0018】
【数1】
H(z) =(1+z−1+z−2+z−3・・・・・・・+z−256)/256
このデシメーションフィルタ53の出力値には、アナログ入力が一定値の場合には前述したように、量子化ノイズが重畳する。この量子化ノイズの大きさはデシメーションフィルタ53の出力刻み幅となる。ここではΔΣ変調型A/D変換器の出力は零または1のいずれかの値であり、デシメーションフィルタ53により256サンプル点の平均化処理を行っているので、刻み幅は1/256となる。そのため量子化ノイズの瞬時振幅は±1/256となる。このデシメーションフィルタ53の出力は、次段の最尤復号回路54へ送られる。
【0019】
図6は図5に図示の最尤復号回路の構成を表した本発明の第3実施例回路図である。最尤復号回路54は、A/D変換サンプリング周波数でデータが順次送られて保持される第1データラッチ56,第2データラッチ57,第3データラッチ58と最尤復号判定部59で構成されていて、デシメーションフィルタ53から送られて保持されたデータのパターンを最尤復号判定部59で判定し、図3で既述のパターンHまたはパターンJの発生の有無をチェックし、このパターンが発生すればパターンAに修正したものを出力する。また、パターンA〜Gは修正処理は行わずに、そのまま出力する。
【0020】
なお、本発明のディジタルフィルタ51を含んだΔΣ変調型A/D変換器を使用している装置(例えば図9の電動機制御回路)では、その制御や各種の信号処理をCPUで行っている場合は、最尤復号回路54が行うべき処理をこのCPUに代行させることができるのは勿論である。
図7はΔΣ変調型A/D変換器に発生した量子化ノイズを本発明の最尤復号回路で修正した状況を表したディジタルデータ図であって、図7▲1▼は最尤復号回路54へ入力するディジタルデータの変化、図7▲2▼は最尤復号回路54から出力するディジタルデータの変化をあらわしている。この図7で明らかなように、パターンHとパターンJを検出し、量子化ノイズに相当するデータを矢印で図示のように修正している。
【0021】
【発明の効果】
従来のΔΣ変調型A/D変換器では、これに入力するアナログ信号が一定値の場合に、そのディジタル出力信号に量子化ノイズが重畳する不具合を生じることがあるので、高次のディジタルフィルタを使用したり、ディザ信号を入れるなどの対策を講じるのであるが、そのために回路規模が大きくなるし、制御応答性能が低下したり、ΔΣ変調型A/D変換器の入力範囲が狭くなるなどの不都合があった。これに対して本発明では、デシメーションフィルタと最尤復号回路を備えることにより、連続する3以上のサンプリングデータの変化パターンから量子化ノイズが含まれているパターンのチェックと修正を行うので、回路規模が大きくなるのを抑制すると共に、制御応答性能の低下を回避できるし、入力範囲を狭くしない効果も得られる。更に、当該ΔΣ変調型A/D変換器を適用している装置の制御にCPUを使用している場合は、このCPUを使って最尤復号回路の動作を代行させることができるので、回路規模の拡大をより一層抑制できる効果も得られる。
【図面の簡単な説明】
【図1】本発明の第1実施例を表したフローチャート
【図2】本発明の第2実施例を表したフローチャート
【図3】連続した3つのサンプリングデータが変化するパターンを表したパターン変化図
【図4】本発明の第3実施例を表したブロック回路図
【図5】図4に記載のディジタルフィルタの構成を表した本発明の第3実施例回路図
【図6】図5に図示の最尤復号回路の構成を表した本発明の第3実施例回路図
【図7】ΔΣ変調型A/D変換器に発生した量子化ノイズを本発明の最尤復号回路で修正した状況を表したディジタルデータ図
【図8】図9に記載している従来のΔΣ変調型A/D変換器の構成を示したブロック回路図
【図9】永久磁石電動機をディジタル制御する場合の回路構成の一般例を示したブロック回路図
【図10】図8に示しているΔΣ変調型A/D変換器へのアナログ入力信号Vi が1/3の場合の動作を示した動作波形図
【図11】図8に示しているΔΣ変調型A/D変換器へのアナログ入力信号Vi が4/7の場合の動作を示した動作波形図
【符号の説明】
1 速度制御器
2 PI制御器
3 UVW変換器
4 比較器
5 インバータ
6 IPMモータ
7 三角波発生器
8 位置検出器
9 ΔΣ変調型A/D変換器
10 座標変換器
11 差動アンプ
12 積分器
13 比較器
14 遅延器
15 1ビットD/A変換器
16,51 ディジタルフィルタ
21〜24,31〜37 処理
26,27,41〜43 判断
53 デシメーションフィルタ
54 最尤復号回路
56 第1データラッチ
57 第2データラッチ
58 第3データラッチ
59 最尤復号判定部
Claims (3)
- ΔΣ変調型A/D変換器が出力する3またはそれ以上の連続したサンプリングデータを検出し、当該連続するサンプリングデータの中の1つの値が他とは異なり、且つ連続する前記サンプリングデータの変化パターンが予め定めたパターンと一致するとき、他とは異なる前記サンプリングデータの値を残余のサンプリングデータと同じ値に修正することを特徴とするΔΣ変調型A/D変換器の出力信号平滑方法。
- 請求項1に記載のΔΣ変調型A/D変換器の出力信号平滑方法において、
前記予め定めたパターンとは、3またはそれ以上の連続したサンプリングデータにおける第2サンプリングデータが第1サンプリングデータとは異なる値であり、且つ第3サンプリングデータが前記第1サンプリングデータと同じ値となるパターンであり、このとき第2サンプリングデータの値を第1または第3サンプリングデータと同じ値に修正することを特徴とするΔΣ変調型A/D変換器の出力信号平滑方法。 - ΔΣ変調型A/D変換器の出力側に接続したデシメーションフィルタと、このデシメーションフィルタが出力する3またはそれ以上の連続したサンプリングデータを別個にラッチする複数のデータラッチ回路と、各データラッチ回路がラッチしたサンプリングデータの尤もらしさの有無を判定する最尤判定回路と、尤もらしいデータへの修正を行う最尤復号回路と、を備えることを特徴とするΔΣ変調型A/D変換器の出力信号平滑回路。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003007881A JP2004222020A (ja) | 2003-01-16 | 2003-01-16 | Δς変調型a/d変換器の出力信号平滑方法とその平滑回路 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003007881A JP2004222020A (ja) | 2003-01-16 | 2003-01-16 | Δς変調型a/d変換器の出力信号平滑方法とその平滑回路 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004222020A true JP2004222020A (ja) | 2004-08-05 |
Family
ID=32897846
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003007881A Pending JP2004222020A (ja) | 2003-01-16 | 2003-01-16 | Δς変調型a/d変換器の出力信号平滑方法とその平滑回路 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004222020A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008147809A (ja) * | 2006-12-07 | 2008-06-26 | Fuji Electric Fa Components & Systems Co Ltd | モータ制御装置およびa/d変換器 |
| JP2015061323A (ja) * | 2013-09-17 | 2015-03-30 | パナソニック株式会社 | 電流検出装置 |
-
2003
- 2003-01-16 JP JP2003007881A patent/JP2004222020A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008147809A (ja) * | 2006-12-07 | 2008-06-26 | Fuji Electric Fa Components & Systems Co Ltd | モータ制御装置およびa/d変換器 |
| JP2015061323A (ja) * | 2013-09-17 | 2015-03-30 | パナソニック株式会社 | 電流検出装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100416277C (zh) | 确定输入信号导数的方法 | |
| Sorensen | σδ-conversion used for motor control | |
| AU2007311340B2 (en) | Power converting apparatus | |
| JP2005537770A (ja) | 交流モータの相電流検出回路の入力フィルタ | |
| US7248989B2 (en) | Speed measurement system for speed control of high-speed motors | |
| JP2016103940A (ja) | モータ制御装置 | |
| EP0322518A1 (en) | Digital protective relay | |
| JP2004304494A (ja) | Δς変調方式のa/d変換器及びこれを用いた制御装置 | |
| US6307494B2 (en) | Device and method for the rapid digital/analog conversion of pulse width modulated signals | |
| EP1956380A1 (en) | Method and related device for estimating two currents flowing simultaneously through respective windings of a poly-phase electrical load driven in SVM mode | |
| CN117978021A (zh) | 永磁同步电机控制方法、装置及存储介质 | |
| JP2013198229A (ja) | Δς変調型a/d変換器およびそれを備えたモータ制御装置 | |
| JP3290946B2 (ja) | 電力演算装置 | |
| JP2004222020A (ja) | Δς変調型a/d変換器の出力信号平滑方法とその平滑回路 | |
| JP2002541692A (ja) | Ac駆動されるトランスデューサからの信号のデジタル位相感知整流 | |
| CN109768784B (zh) | 抽取滤波器 | |
| JPH05167450A (ja) | アナログ・デジタル変換回路 | |
| JP4310113B2 (ja) | 電力関連量計測装置 | |
| JP2009005073A (ja) | デジタルアナログ変換器と歪補正回路 | |
| JP2000116115A (ja) | Pwm電力変換装置 | |
| JP4385931B2 (ja) | 直流電流検出装置 | |
| JP2003157627A (ja) | ディスクドライブにおける適応的トラックゼロクロッシング信号発生装置及び方法 | |
| JP2002152043A (ja) | シグマデルタ形ad変換装置 | |
| JP3408238B2 (ja) | レゾルバ/デジタル変換装置および変換方法 | |
| JP2000068833A (ja) | ディジタルフィルタ方式 |