JP2004239689A - 偏差角度検出装置 - Google Patents
偏差角度検出装置 Download PDFInfo
- Publication number
- JP2004239689A JP2004239689A JP2003027434A JP2003027434A JP2004239689A JP 2004239689 A JP2004239689 A JP 2004239689A JP 2003027434 A JP2003027434 A JP 2003027434A JP 2003027434 A JP2003027434 A JP 2003027434A JP 2004239689 A JP2004239689 A JP 2004239689A
- Authority
- JP
- Japan
- Prior art keywords
- output
- resolvers
- deviation angle
- windings
- arithmetic processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000004804 winding Methods 0.000 claims abstract description 56
- 238000001514 detection method Methods 0.000 claims description 22
- 230000005284 excitation Effects 0.000 claims description 7
- 238000006073 displacement reaction Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/204—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils
- G01D5/2073—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils by movement of a single coil with respect to two or more coils
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M1/00—Analogue/digital conversion; Digital/analogue conversion
- H03M1/12—Analogue/digital converters
- H03M1/64—Analogue/digital converters with intermediate conversion to phase of sinusoidal or similar periodical signals
- H03M1/645—Analogue/digital converters with intermediate conversion to phase of sinusoidal or similar periodical signals for position encoding, e.g. using resolvers or synchros
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Measuring Fluid Pressure (AREA)
Abstract
【目的】コスト、スペース、処理速度等の問題を解決しつつ、検出可能な偏差角度範囲を拡大してその適用範囲を広げることができる偏差角度検出装置を提供すること。
【構成】ロータ10,20とステータ11,21及び該ステータ11,21に巻回された単一の励磁巻線と複数の出力巻線12,13と22,23を含んで構成されるレゾルバVR1,VR2を2台備え、両レゾルバVR1,VR2の回転角度差Δθに応じた出力信号をデジタル又はアナログ演算処理して両レゾルバVR1,VR2の回転角度差を偏位角度Δθとして検出する偏位角度検出装置1において、前記両レゾルバVR1,VR2の対応する出力巻線12と22及び13と23同士を直列に接続し、直列接続された出力巻線12と22及び13と23からの出力信号Es,Ecを取り出してデジタル又はアナログ演算処理する。
【選択図】 図1
【構成】ロータ10,20とステータ11,21及び該ステータ11,21に巻回された単一の励磁巻線と複数の出力巻線12,13と22,23を含んで構成されるレゾルバVR1,VR2を2台備え、両レゾルバVR1,VR2の回転角度差Δθに応じた出力信号をデジタル又はアナログ演算処理して両レゾルバVR1,VR2の回転角度差を偏位角度Δθとして検出する偏位角度検出装置1において、前記両レゾルバVR1,VR2の対応する出力巻線12と22及び13と23同士を直列に接続し、直列接続された出力巻線12と22及び13と23からの出力信号Es,Ecを取り出してデジタル又はアナログ演算処理する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、2台のレゾルバの回転角度差を偏位角度として検出する偏位角度検出装置に関する。
【0002】
【従来の技術】
この種の偏位角度検出装置は、ロータとステータ及び該ステータに巻回された単一の励磁巻線と複数の出力巻線を含んで構成されるレゾルバを2台備え、各レゾルバの出力信号又は両レゾルバの回転角度差に応じた出力信号をデジタル又はアナログ演算処理して両レゾルバの回転角度差を偏位角度として検出するものであって、例えば、動力伝達軸の捩れ角を検出することによって伝達トルクを求める手段として使用されている(例えば、特開平11−321689号、特開2001−272204号公報参照)。
【0003】
ここで、偏位角度検出装置の従来例を図3に示す。
【0004】
図3に示す偏位角度検出装置100は、2台のレゾルバ(バリアブルリラクタンスレゾルバ)VR1,VR2を備えるが、各レゾルバVR1,VR2は、ロータ110,120とステータ111,121及び該ステータ111,121に巻回された単一の励磁巻線(不図示)と複数の出力巻線112,113及び122,123を含んで構成されている。そして、各レゾルバVR1,VR2の出力巻線112,113及び122,123からの出力信号Es(sin信号)とEc(cos信号)は各R/D変換器(レゾルバデジタル変換器)130に入力されてデジタル化され、デジタル化された信号はコントローラ140に入力されて演算処理され、各レゾルバVR1,VR2のロータ110,120の回転角度θ1 ,θ2 の差として偏差角度Δθが算出される。
【0005】
ところが、上記偏差角度検出装置100においては、2台のレゾルバVR1,VR2を使用して各々の出力信号Es,Ecを別々にデジタル演算処理(アナログ演算処理でも可)する方法を採用しているため、2台のR/D変換器130を要し、コスト、スペース、処理速度等の点で問題があった。
【0006】
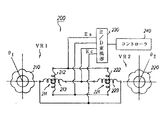
そこで、図4に示す偏差角度検出装置200のように、両レゾルバVR1,VR2の対応する各出力巻線212と222及び213と223とを並列接続し、接続した箇所から両レゾルバVR1,VR2のロータ210,220の回転角度差(偏差角度)Δθに応じた出力信号Es(sin信号)とEc(cos信号)を取り出してR/D変換器230に入力し、該R/D変換器230によってデジタル化された信号をコントローラ240に入力して偏差角度Δθを算出する方法が提案されており、この方式によればR/D変換器230が1台で済み、前記問題が解消される。
【0007】
【発明が解決しようとする課題】
しかしながら、図4に示す従来の偏位角度検出装置200においては、高精度な検出が可能な偏差角度Δθは最大で±22.5°であるため(特開2001−272204号公報参照)、該装置200の適用範囲が制限されるという問題があった。
【0008】
本発明は上記問題に鑑みてなされたもので、その目的とする処は、コスト、スペース、処理速度等の問題を解決しつつ、検出可能な偏差角度範囲を拡大してその適用範囲を広げることができる偏差角度検出装置を提供することにある。
【0009】
【課題を解決するための手段】
上記目的を達成するため、請求項1記載の発明は、ロータとステータ及び該ステータに巻回された単一の励磁巻線と複数の出力巻線を含んで構成されるレゾルバを2台備え、両レゾルバの回転角度差に応じた出力信号をデジタル又はアナログ演算処理して両レゾルバの回転角度差を偏位角度として検出する偏位角度検出装置において、前記両レゾルバの対応する出力巻線同士を直列に接続し、直列接続された出力巻線からの出力信号を取り出してデジタル又はアナログ演算処理するようにしたことを特徴とする。
【0010】
請求項2記載の発明は、請求項1記載の発明において、前記各レゾルバの出力巻線を、位相を90°ずらして巻回された2種類の巻線で構成したことを特徴とする。
【0011】
請求項3記載の発明は、請求項1又は2記載の発明において、直列接続された出力巻線からの出力信号を単一のアナログ又はデジタル演算処理用変換器に入力するようにしたことを特徴とする。
【0012】
従って、本発明によれば、両レゾルバの直列接続された出力巻線からは両レゾルバの回転角度差(偏差角度)Δθに応じたの出力信号が取り出されるため、アナログ又はデジタル演算処理用変換器が1台で済み、コストダウン、省スペース、処理速度の向上等を図ることができる。
【0013】
又、各レゾルバの出力巻線を位相が90°ずらして巻回された2種類の巻線出構成した場合、直列接続された出力巻線から出力される出力信号Es(sin信号)とEc(cos信号)は、両レゾルバの偏差角度Δθの関数であるsin(Δθ)、cos(Δθ)で表すことができ、偏差角度ΔθをΔθ=tan−1(Es/Ec)で求めることができる。従って、偏差角度Δθの検出可能な範囲は±90°まで拡大され、当該偏差角度検出装置の適用範囲が広げられる。
【0014】
【発明の実施の形態】
以下に本発明の実施の形態を添付図面に基づいて説明する。
【0015】
図1は本発明に係る偏差角度検出装置1の回路構成図であり、図示の偏位角度検出装置1は、2台のレゾルバ(バリアブルリラクタンスレゾルバ)VR1,VR2と各1台のR/D変換器30とコントローラ40を備えている。
【0016】
上記レゾルバVR1は、ロータ10とステータ11及び該ステータ11に巻回された単一の励磁巻線(不図示)と複数の出力巻線12,13を含んで構成されている。ここで、出力巻線は12,13、位相を90°ずらして巻回された2種類の巻線で構成されており、これらはロータ10の回転角度θ1 のsin成分、cos成分をそれぞれ出力するものである。
【0017】
又、同様に、レゾルバVR2もロータ20とステータ21及び該ステータ21に巻回された単一の励磁巻線(不図示)と複数の出力巻線22,23を含んで構成されている。ここで、出力巻線22,23は、位相を90°ずらして巻回された2種類の巻線で構成されており、これらはロータ20の回転角度θ2 のsin成分、cos成分をそれぞれ出力するものである。
【0018】
而して、本実施の形態に係る偏差角度検出装置1においては、両レゾルバVR1,VR2の対応する出力巻線同士、つまり、出力信号のsin成分を出力する出力巻線12と22同士を直列接続し、出力信号のcos成分を出力する出力巻線13と23同士を直列接続し、直列接続された出力巻線12と22及び出力巻線13と23からの出力信号Rs,Ecを取り出してR/D変換器30に入力してデジタル化し、デジタル化された出力信号Rs,Ecに基づいてコントローラ40で演算処理して両レゾルバVR1,VR2の偏差角度Δθ(=θ1 −θ2 )を算出するようにしている。
【0019】
以下、偏差角度Δθの検出方法を具体的に説明する。
【0020】
各レゾルバVR1,VR2のステータ11,21にそれぞれ巻回された不図示の励磁巻線に入力信号として交流電圧:KEsinωt(Kは定数(変圧比)、ωは角周波数、tは時間)が印加されると、各レゾルバVR1,VR2の出力巻線12,13及び22,23には以下の信号が出力される。
【0021】
1)レゾルバVR1の出力巻線12,13から出力されるsin信号出力EVR1sとcos信号出力EVR1cは、
EVR1s=KEsinωt・sinθ1
EVR1c=KEsinωt・cosθ1
となる。
【0022】
2)レゾルバVR2の出力巻線22,23から出力されるsin信号出力EVR2sとcos信号出力EVR2cは、
 となる。ここに、ΔθはレゾルバVR1とVR2の偏差角度である。
となる。ここに、ΔθはレゾルバVR1とVR2の偏差角度である。
【0023】
3)出力信号のsin成分を出力する出力巻線同士を直列接続し、出力信号のcos成分を出力する出力巻線同士を直列接続した場合のsin出力信号Esは、
ここで、両レゾルバVR1,VR2の電機的零点を0に合わせると、θ1 =0となるため、
となり、sin出力信号EsはレゾルバVR1とVR2の偏差角度Δθのsin関数で表すことができる。
【0024】
同様にcos出力成分Ecは、
ここで、両レゾルバVR1,VR2の電機的零点を0に合わせると、θ1 =0となるため、
となり、cos出力信号EcはレゾルバVR1とVR2の偏差角度Δθのcos関数で表すことができる。
【0025】
4)偏差角度Δθの算出は以下の手順によってなされる。
【0026】
前記▲1▼、▲2▼式にてそれぞれ表されるsin出力成分Esとcos出力成分Ecは、前述のように1台のR/D変換器30に入力されてデジタル化された後、コントローラ40に入力される。
【0027】
ところで、前記▲1▼、▲2▼式から
tan(Δθ)=Es/Ec … ▲3▼
Δθ=tan−1(Es/Ec) … ▲4▼
が得られるため、コントローラでは上記▲4▼式によって偏差角度Δθを算出することができる。
【0028】
ここで、▲3▼式を横軸に偏差角度Δθ、縦軸に出力比(Es/Ec)をとって図示すると図2のようになるが、この図から明らかなように、本発明に係る偏差角度検出装置1によって検出され得る偏差角度Δθの範囲は±90°となり、従来の±22.5°に対して大幅に拡大される。
【0029】
以上において、本発明に係る偏差角度検出装置1によれば、両レゾルバVR1,VR2の直列接続された出力巻線12と22及び13と23からは両レゾルバVR1,VR2の回転角度差(偏差角度)Δθに応じた出力信号Es,Ecが取り出されるため、R/D変換器30が1台で済み、コストダウン、省スペース、処理速度の向上等を図ることができる。
【0030】
又、偏差角度Δθの検出可能な範囲が±90°まで拡大されるため、当該偏差角度検出装置1の適用範囲が広げられる。
【0031】
尚、以上は直列接続された出力巻線からの出力信号を取り出してデジタル処理する形態について述べたが、アナログ演算処理するようにしても良く、この場合は1台のアナログ演算処理用変換器を用いれば良い。
【0032】
【発明の効果】
以上の説明で明らかなように、本発明によれば、ロータとステータ及び該ステータに巻回された単一の励磁巻線と複数の出力巻線を含んで構成されるレゾルバを2台備え、両レゾルバの回転角度差に応じた出力信号をデジタル又はアナログ演算処理して両レゾルバの回転角度差を偏位角度として検出する偏位角度検出装置において、前記両レゾルバの対応する出力巻線同士を直列に接続し、直列接続された出力巻線からの出力信号を取り出してデジタル又はアナログ演算処理するようにしたため、コスト、スペース、処理速度等の問題を解決しつつ、検出可能な偏差角度範囲を拡大して当該偏差角度検出装置の適用範囲を広げることができるという効果が得られる。
【図面の簡単な説明】
【図1】本発明に係る偏差角度検出装置の回路構成図である。
【図2】本発明に係る偏差角度検出装置において検出される偏差角度Δθと出力信号比Es/Ecとの関係を示す図である。
【図3】従来例1に係る偏差角度検出装置の回路構成図である。
【図4】従来例2に係る偏差角度検出装置の回路構成図である。
【符号の説明】
1 偏差角度検出装置
10,20 ロータ
11,21 ステータ
12,22 出力巻線(sin成分出力用)
13,23 出力巻線(cos成分出力用)
30 R/D変換器(デジタル演算処理用変換器)
40 コントローラ
VR1,VR2 レゾルバ
【発明の属する技術分野】
本発明は、2台のレゾルバの回転角度差を偏位角度として検出する偏位角度検出装置に関する。
【0002】
【従来の技術】
この種の偏位角度検出装置は、ロータとステータ及び該ステータに巻回された単一の励磁巻線と複数の出力巻線を含んで構成されるレゾルバを2台備え、各レゾルバの出力信号又は両レゾルバの回転角度差に応じた出力信号をデジタル又はアナログ演算処理して両レゾルバの回転角度差を偏位角度として検出するものであって、例えば、動力伝達軸の捩れ角を検出することによって伝達トルクを求める手段として使用されている(例えば、特開平11−321689号、特開2001−272204号公報参照)。
【0003】
ここで、偏位角度検出装置の従来例を図3に示す。
【0004】
図3に示す偏位角度検出装置100は、2台のレゾルバ(バリアブルリラクタンスレゾルバ)VR1,VR2を備えるが、各レゾルバVR1,VR2は、ロータ110,120とステータ111,121及び該ステータ111,121に巻回された単一の励磁巻線(不図示)と複数の出力巻線112,113及び122,123を含んで構成されている。そして、各レゾルバVR1,VR2の出力巻線112,113及び122,123からの出力信号Es(sin信号)とEc(cos信号)は各R/D変換器(レゾルバデジタル変換器)130に入力されてデジタル化され、デジタル化された信号はコントローラ140に入力されて演算処理され、各レゾルバVR1,VR2のロータ110,120の回転角度θ1 ,θ2 の差として偏差角度Δθが算出される。
【0005】
ところが、上記偏差角度検出装置100においては、2台のレゾルバVR1,VR2を使用して各々の出力信号Es,Ecを別々にデジタル演算処理(アナログ演算処理でも可)する方法を採用しているため、2台のR/D変換器130を要し、コスト、スペース、処理速度等の点で問題があった。
【0006】
そこで、図4に示す偏差角度検出装置200のように、両レゾルバVR1,VR2の対応する各出力巻線212と222及び213と223とを並列接続し、接続した箇所から両レゾルバVR1,VR2のロータ210,220の回転角度差(偏差角度)Δθに応じた出力信号Es(sin信号)とEc(cos信号)を取り出してR/D変換器230に入力し、該R/D変換器230によってデジタル化された信号をコントローラ240に入力して偏差角度Δθを算出する方法が提案されており、この方式によればR/D変換器230が1台で済み、前記問題が解消される。
【0007】
【発明が解決しようとする課題】
しかしながら、図4に示す従来の偏位角度検出装置200においては、高精度な検出が可能な偏差角度Δθは最大で±22.5°であるため(特開2001−272204号公報参照)、該装置200の適用範囲が制限されるという問題があった。
【0008】
本発明は上記問題に鑑みてなされたもので、その目的とする処は、コスト、スペース、処理速度等の問題を解決しつつ、検出可能な偏差角度範囲を拡大してその適用範囲を広げることができる偏差角度検出装置を提供することにある。
【0009】
【課題を解決するための手段】
上記目的を達成するため、請求項1記載の発明は、ロータとステータ及び該ステータに巻回された単一の励磁巻線と複数の出力巻線を含んで構成されるレゾルバを2台備え、両レゾルバの回転角度差に応じた出力信号をデジタル又はアナログ演算処理して両レゾルバの回転角度差を偏位角度として検出する偏位角度検出装置において、前記両レゾルバの対応する出力巻線同士を直列に接続し、直列接続された出力巻線からの出力信号を取り出してデジタル又はアナログ演算処理するようにしたことを特徴とする。
【0010】
請求項2記載の発明は、請求項1記載の発明において、前記各レゾルバの出力巻線を、位相を90°ずらして巻回された2種類の巻線で構成したことを特徴とする。
【0011】
請求項3記載の発明は、請求項1又は2記載の発明において、直列接続された出力巻線からの出力信号を単一のアナログ又はデジタル演算処理用変換器に入力するようにしたことを特徴とする。
【0012】
従って、本発明によれば、両レゾルバの直列接続された出力巻線からは両レゾルバの回転角度差(偏差角度)Δθに応じたの出力信号が取り出されるため、アナログ又はデジタル演算処理用変換器が1台で済み、コストダウン、省スペース、処理速度の向上等を図ることができる。
【0013】
又、各レゾルバの出力巻線を位相が90°ずらして巻回された2種類の巻線出構成した場合、直列接続された出力巻線から出力される出力信号Es(sin信号)とEc(cos信号)は、両レゾルバの偏差角度Δθの関数であるsin(Δθ)、cos(Δθ)で表すことができ、偏差角度ΔθをΔθ=tan−1(Es/Ec)で求めることができる。従って、偏差角度Δθの検出可能な範囲は±90°まで拡大され、当該偏差角度検出装置の適用範囲が広げられる。
【0014】
【発明の実施の形態】
以下に本発明の実施の形態を添付図面に基づいて説明する。
【0015】
図1は本発明に係る偏差角度検出装置1の回路構成図であり、図示の偏位角度検出装置1は、2台のレゾルバ(バリアブルリラクタンスレゾルバ)VR1,VR2と各1台のR/D変換器30とコントローラ40を備えている。
【0016】
上記レゾルバVR1は、ロータ10とステータ11及び該ステータ11に巻回された単一の励磁巻線(不図示)と複数の出力巻線12,13を含んで構成されている。ここで、出力巻線は12,13、位相を90°ずらして巻回された2種類の巻線で構成されており、これらはロータ10の回転角度θ1 のsin成分、cos成分をそれぞれ出力するものである。
【0017】
又、同様に、レゾルバVR2もロータ20とステータ21及び該ステータ21に巻回された単一の励磁巻線(不図示)と複数の出力巻線22,23を含んで構成されている。ここで、出力巻線22,23は、位相を90°ずらして巻回された2種類の巻線で構成されており、これらはロータ20の回転角度θ2 のsin成分、cos成分をそれぞれ出力するものである。
【0018】
而して、本実施の形態に係る偏差角度検出装置1においては、両レゾルバVR1,VR2の対応する出力巻線同士、つまり、出力信号のsin成分を出力する出力巻線12と22同士を直列接続し、出力信号のcos成分を出力する出力巻線13と23同士を直列接続し、直列接続された出力巻線12と22及び出力巻線13と23からの出力信号Rs,Ecを取り出してR/D変換器30に入力してデジタル化し、デジタル化された出力信号Rs,Ecに基づいてコントローラ40で演算処理して両レゾルバVR1,VR2の偏差角度Δθ(=θ1 −θ2 )を算出するようにしている。
【0019】
以下、偏差角度Δθの検出方法を具体的に説明する。
【0020】
各レゾルバVR1,VR2のステータ11,21にそれぞれ巻回された不図示の励磁巻線に入力信号として交流電圧:KEsinωt(Kは定数(変圧比)、ωは角周波数、tは時間)が印加されると、各レゾルバVR1,VR2の出力巻線12,13及び22,23には以下の信号が出力される。
【0021】
1)レゾルバVR1の出力巻線12,13から出力されるsin信号出力EVR1sとcos信号出力EVR1cは、
EVR1s=KEsinωt・sinθ1
EVR1c=KEsinωt・cosθ1
となる。
【0022】
2)レゾルバVR2の出力巻線22,23から出力されるsin信号出力EVR2sとcos信号出力EVR2cは、
【0023】
3)出力信号のsin成分を出力する出力巻線同士を直列接続し、出力信号のcos成分を出力する出力巻線同士を直列接続した場合のsin出力信号Esは、
【0024】
同様にcos出力成分Ecは、
【0025】
4)偏差角度Δθの算出は以下の手順によってなされる。
【0026】
前記▲1▼、▲2▼式にてそれぞれ表されるsin出力成分Esとcos出力成分Ecは、前述のように1台のR/D変換器30に入力されてデジタル化された後、コントローラ40に入力される。
【0027】
ところで、前記▲1▼、▲2▼式から
tan(Δθ)=Es/Ec … ▲3▼
Δθ=tan−1(Es/Ec) … ▲4▼
が得られるため、コントローラでは上記▲4▼式によって偏差角度Δθを算出することができる。
【0028】
ここで、▲3▼式を横軸に偏差角度Δθ、縦軸に出力比(Es/Ec)をとって図示すると図2のようになるが、この図から明らかなように、本発明に係る偏差角度検出装置1によって検出され得る偏差角度Δθの範囲は±90°となり、従来の±22.5°に対して大幅に拡大される。
【0029】
以上において、本発明に係る偏差角度検出装置1によれば、両レゾルバVR1,VR2の直列接続された出力巻線12と22及び13と23からは両レゾルバVR1,VR2の回転角度差(偏差角度)Δθに応じた出力信号Es,Ecが取り出されるため、R/D変換器30が1台で済み、コストダウン、省スペース、処理速度の向上等を図ることができる。
【0030】
又、偏差角度Δθの検出可能な範囲が±90°まで拡大されるため、当該偏差角度検出装置1の適用範囲が広げられる。
【0031】
尚、以上は直列接続された出力巻線からの出力信号を取り出してデジタル処理する形態について述べたが、アナログ演算処理するようにしても良く、この場合は1台のアナログ演算処理用変換器を用いれば良い。
【0032】
【発明の効果】
以上の説明で明らかなように、本発明によれば、ロータとステータ及び該ステータに巻回された単一の励磁巻線と複数の出力巻線を含んで構成されるレゾルバを2台備え、両レゾルバの回転角度差に応じた出力信号をデジタル又はアナログ演算処理して両レゾルバの回転角度差を偏位角度として検出する偏位角度検出装置において、前記両レゾルバの対応する出力巻線同士を直列に接続し、直列接続された出力巻線からの出力信号を取り出してデジタル又はアナログ演算処理するようにしたため、コスト、スペース、処理速度等の問題を解決しつつ、検出可能な偏差角度範囲を拡大して当該偏差角度検出装置の適用範囲を広げることができるという効果が得られる。
【図面の簡単な説明】
【図1】本発明に係る偏差角度検出装置の回路構成図である。
【図2】本発明に係る偏差角度検出装置において検出される偏差角度Δθと出力信号比Es/Ecとの関係を示す図である。
【図3】従来例1に係る偏差角度検出装置の回路構成図である。
【図4】従来例2に係る偏差角度検出装置の回路構成図である。
【符号の説明】
1 偏差角度検出装置
10,20 ロータ
11,21 ステータ
12,22 出力巻線(sin成分出力用)
13,23 出力巻線(cos成分出力用)
30 R/D変換器(デジタル演算処理用変換器)
40 コントローラ
VR1,VR2 レゾルバ
Claims (3)
- ロータとステータ及び該ステータに巻回された単一の励磁巻線と複数の出力巻線を含んで構成されるレゾルバを2台備え、両レゾルバの回転角度差に応じた出力信号をデジタル又はアナログ演算処理して両レゾルバの回転角度差を偏位角度として検出する偏位角度検出装置において、
前記両レゾルバの対応する出力巻線同士を直列に接続し、直列接続された出力巻線からの出力信号を取り出してデジタル又はアナログ演算処理するようにしたことを特徴とする偏位角度検出装置。 - 前記各レゾルバの出力巻線は、位相を90°ずらして巻回された2種類の巻線で構成されることを特徴とする請求項1記載の偏位角度検出装置。
- 直列接続された出力巻線からの出力信号を単一のアナログ又はデジタル演算処理用変換器に入力するようにしたことを特徴とする請求項1又は2記載の偏位角度検出装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003027434A JP2004239689A (ja) | 2003-02-04 | 2003-02-04 | 偏差角度検出装置 |
| US10/766,322 US7119536B2 (en) | 2003-02-04 | 2004-01-29 | Two-resolver deviation angle detector having serially connected output windings |
| EP04002361A EP1450148B1 (en) | 2003-02-04 | 2004-02-03 | Deviation Angle Detector |
| DE602004015655T DE602004015655D1 (de) | 2003-02-04 | 2004-02-03 | Winkelversatz-Detektor |
| AT04002361T ATE404854T1 (de) | 2003-02-04 | 2004-02-03 | Winkelversatz-detektor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003027434A JP2004239689A (ja) | 2003-02-04 | 2003-02-04 | 偏差角度検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004239689A true JP2004239689A (ja) | 2004-08-26 |
Family
ID=32732890
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003027434A Withdrawn JP2004239689A (ja) | 2003-02-04 | 2003-02-04 | 偏差角度検出装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7119536B2 (ja) |
| EP (1) | EP1450148B1 (ja) |
| JP (1) | JP2004239689A (ja) |
| AT (1) | ATE404854T1 (ja) |
| DE (1) | DE602004015655D1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025501356A (ja) * | 2022-01-05 | 2025-01-17 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 角度センサアレイ及び角度特定のための方法 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005345454A (ja) * | 2004-06-07 | 2005-12-15 | Minebea Co Ltd | 多重化レゾルバ連続巻線方法および多重化レゾルバ |
| KR20240034843A (ko) * | 2021-08-23 | 2024-03-14 | 파커-한니핀 코포레이션 | 향상된 속력 및 방향 모니터링으로 리졸버 및 모터를 제어하기 위한 시스템들 및 방법들 |
| CN114706018B (zh) * | 2022-04-18 | 2024-09-24 | 云南电网有限责任公司电力科学研究院 | 变压器绕组形变监测系统及方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3584276A (en) * | 1969-05-13 | 1971-06-08 | Allis Chalmers Mfg Co | Vehicle electric motor drive system |
| US3641467A (en) * | 1969-05-13 | 1972-02-08 | Allis Chalmers Mfg Co | Rotary inductor |
| US3705343A (en) * | 1971-04-26 | 1972-12-05 | William L Ringland | Three phase rotary inductor vector adder |
| US3885209A (en) * | 1973-12-27 | 1975-05-20 | Astrosyst Inc | Two speed control systems |
| US4762007A (en) * | 1987-02-18 | 1988-08-09 | Allen-Brady Company, Inc. | Torque measuring apparatus |
| US5134397A (en) | 1991-06-17 | 1992-07-28 | Hughes Aircraft Company | Phase compensation for electromagnetic resolvers |
| JP3414893B2 (ja) * | 1995-07-12 | 2003-06-09 | オークマ株式会社 | 回転位置検出装置 |
| US5949359A (en) | 1997-05-09 | 1999-09-07 | Kollmorgen Corporation | Variable reluctance resolver to digital converter |
| JP3725694B2 (ja) | 1998-05-20 | 2005-12-14 | 光洋精工株式会社 | 車両のステアリング装置 |
| JP2001194251A (ja) | 2000-01-06 | 2001-07-19 | Tamagawa Seiki Co Ltd | パワーステアリング検出装置 |
| JP2001272204A (ja) | 2000-03-24 | 2001-10-05 | Samutaku Kk | ねじれ量測定装置 |
-
2003
- 2003-02-04 JP JP2003027434A patent/JP2004239689A/ja not_active Withdrawn
-
2004
- 2004-01-29 US US10/766,322 patent/US7119536B2/en not_active Expired - Lifetime
- 2004-02-03 DE DE602004015655T patent/DE602004015655D1/de not_active Expired - Lifetime
- 2004-02-03 AT AT04002361T patent/ATE404854T1/de not_active IP Right Cessation
- 2004-02-03 EP EP04002361A patent/EP1450148B1/en not_active Expired - Lifetime
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025501356A (ja) * | 2022-01-05 | 2025-01-17 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 角度センサアレイ及び角度特定のための方法 |
| JP7785184B2 (ja) | 2022-01-05 | 2025-12-12 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 角度センサアレイ及び角度特定のための方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| ATE404854T1 (de) | 2008-08-15 |
| EP1450148A1 (en) | 2004-08-25 |
| US7119536B2 (en) | 2006-10-10 |
| DE602004015655D1 (de) | 2008-09-25 |
| US20040257025A1 (en) | 2004-12-23 |
| EP1450148B1 (en) | 2008-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4909797B2 (ja) | モータ制御装置 | |
| JP3312472B2 (ja) | 電動機の磁極位置検出装置 | |
| EP1580533A3 (en) | Variable-reluctance resolver and rotational angle sensor using same | |
| JP2008241405A (ja) | レゾルバ | |
| JP3047565B2 (ja) | 可変リラクタンス形レゾルバ | |
| JP2001235307A (ja) | 回転型位置検出装置 | |
| JP2003287441A (ja) | 回転位置検出器 | |
| JPH11337373A (ja) | 回転センサ及びその異常診断方法及びそれを用いた電動機の制御システム | |
| JP7291104B2 (ja) | 3相ブラシレスモーター及び3相ブラシレスモーターの回転位置検出方法 | |
| JPH09257410A (ja) | アブソリュートエンコーダ | |
| JP2004239689A (ja) | 偏差角度検出装置 | |
| JP2624747B2 (ja) | レゾルバ | |
| EP3901583B1 (en) | Resolver interface systems and methods | |
| JP4365654B2 (ja) | 角度位置検出装置及びこれを用いた駆動装置 | |
| JPH11118521A (ja) | Vr形レゾルバ及びレゾルバ信号処理回路 | |
| JP5573758B2 (ja) | 位置検出装置 | |
| JP3100841B2 (ja) | 回転位置検出装置及びその方法 | |
| JP7186846B1 (ja) | 角度検出装置及び交流回転機の制御システム | |
| JPH0632581B2 (ja) | 誘導電動機制御装置 | |
| JP4166332B2 (ja) | 可変磁気抵抗形位置検出器と感温スイッチを用いるモータ制御装置 | |
| JP2972430B2 (ja) | 磁気レゾルバ | |
| JP2007166687A (ja) | モータ装置及びモータ駆動制御装置 | |
| JP4311523B2 (ja) | ブラシレスレゾルバ | |
| JPH0621798B2 (ja) | アブソリュート位置検出器及びその検出回路 | |
| JP2024093774A (ja) | 電流測定方法、電流測定システム及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050309 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070125 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20070419 |