JP2004249896A - 無人搬送車 - Google Patents
無人搬送車 Download PDFInfo
- Publication number
- JP2004249896A JP2004249896A JP2003044146A JP2003044146A JP2004249896A JP 2004249896 A JP2004249896 A JP 2004249896A JP 2003044146 A JP2003044146 A JP 2003044146A JP 2003044146 A JP2003044146 A JP 2003044146A JP 2004249896 A JP2004249896 A JP 2004249896A
- Authority
- JP
- Japan
- Prior art keywords
- caster
- drive wheel
- wheel unit
- vehicle body
- traveling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Platform Screen Doors And Railroad Systems (AREA)
- Vehicle Body Suspensions (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
【課題】前後進のいずれにおいても安定した操舵ができる無人搬送車を提供する。
【解決手段】車体2の走行方向前方と後方とにそれぞれ縦軸回りに旋回自在に支持された前方キャスタ3と後方キャスタ4と、車体2の車軸方向に沿って前後に自在に支持され、駆動源により前後方向に走行自在に支持された駆動輪26を有し、かつ、予め走行路上に設けられたガイド線27の記録を読み取り駆動輪26の走行方向の操舵を制御すると共に前後駆動制御する駆動輪制御手段20を有する駆動輪ユニット5と、駆動輪ユニット5が前方キャスタ3又は後方キャスタ4のいずれか一方の方向に走行移動したときに他方のキャスタを車軸方向に回転するようにロックすると共に一方のキャスタを縦軸回りに旋回自在に解除するキャスタロック解除手段6とを備えたものである。
【選択図】 図1
【解決手段】車体2の走行方向前方と後方とにそれぞれ縦軸回りに旋回自在に支持された前方キャスタ3と後方キャスタ4と、車体2の車軸方向に沿って前後に自在に支持され、駆動源により前後方向に走行自在に支持された駆動輪26を有し、かつ、予め走行路上に設けられたガイド線27の記録を読み取り駆動輪26の走行方向の操舵を制御すると共に前後駆動制御する駆動輪制御手段20を有する駆動輪ユニット5と、駆動輪ユニット5が前方キャスタ3又は後方キャスタ4のいずれか一方の方向に走行移動したときに他方のキャスタを車軸方向に回転するようにロックすると共に一方のキャスタを縦軸回りに旋回自在に解除するキャスタロック解除手段6とを備えたものである。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、走行路上に設けられたガイド線に沿って自動走行する無人搬送車に関するものである。
【0002】
【従来の技術】
一般に無人搬送車は、車両を安定して操舵するために進行方向前側のキャスタ(前方キャスタ)を旋回自在とし、後側のキャスタ(後方キャスタ)を固定して走行するように構成されている。ここで、スペースの制約上、無人搬送車を方向転換せずにそのまま後退させる必要が生じる場合もある。このような場合、先行する後方キャスタが向きを固定され、追従する前方キャスタが旋回自在となるために、安定した操舵ができず、走行ラインから外れてしまうという問題があった。
【0003】
このような問題を解決する技術としては、特許文献1及び特許文献2に記載のものがある。
【0004】
図5に示すように、特許文献1に記載の無人搬送車40は、車体41の四隅に配置された縦軸回り旋回自在なキャスタ42,43と、これらキャスタ42,43の旋回を切換自在にロックするロック手段44とを備えている。そして、ロック手段44は、前進時に後方キャスタ43のみをロックし、後退時に前方キャスタ42のみをロックすることで操舵性を向上させるように機能する。
【0005】
【特許文献1】
特許第3222772号公報
【特許文献2】
特許第3222809号公報
【0006】
【発明が解決しようとする課題】
しかしながら、特許文献1に記載の無人搬送車40は、車体中央部に配置された駆動輪45を正反転させることで前後進するようになっているため、操舵の安定性が十分でなく、改良の余地が残されていた。すなわち、一般に駆動輪45を進行方向側に偏らせるほど良好な操舵性を得られるが、駆動輪45を車体中央に配置すると進行方向側に偏らせた場合ほど良好な操舵性を得られなかった。
【0007】
そこで、本発明の目的は、上記課題を解決し、前後進のいずれにおいても安定した操舵ができる無人搬送車を提供することにある。
【0008】
【課題を解決するための手段】
上記目的を達成するために本発明は、車体の走行方向前方と後方とにそれぞれ縦軸回りに旋回自在に支持された前方キャスタと後方キャスタと、上記車体の車軸方向に沿って前後に自在に支持され、駆動源により前後方向に走行自在に支持された駆動輪を有し、かつ、予め走行路上に設けられたガイド線の記録を読み取り上記駆動輪の走行方向の操舵を制御すると共に前後駆動制御する駆動輪制御手段を有する駆動輪ユニットと、該駆動輪ユニットが上記前方キャスタ又は後方キャスタのいずれか一方の方向に走行移動したときに他方のキャスタを車軸方向に回転するようにロックすると共に上記一方のキャスタを上記縦軸回りに旋回自在に解除するキャスタロック解除手段とを備えたものである。
【0009】
また、上記キャスタロック解除手段は、上記駆動輪ユニットに係合され駆動輪ユニットが前進したときに上記後方キャスタに係合し、後退したときに後方キャスタから離脱する後方リンク機構と、上記駆動輪ユニットに係合され駆動輪ユニットが後退したときに上記前方キャスタに係合し、前進したときに前方キャスタから離脱する前方リンク機構とを備えるとよい。
【0010】
そして、上記前方リンク機構と後方リンク機構は、上記車体に回動自在に支持され上記駆動輪ユニットの移動に伴って回動するレバーと、該レバーに設けられレバーが所定の位置に回動したときに上記前方キャスタ又は後方キャスタに係合される係合部とを備えるとよい。
【0011】
【発明の実施の形態】
本発明の好適実施の形態を添付図面に基づいて詳述する。
【0012】
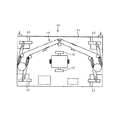
図1、図2及び図3に示すように、無人搬送車1は、荷(図示せず)を積載可能な車体2と、車体2の走行方向前方と後方とにそれぞれ縦軸回りに旋回自在に支持されたキャスタ3,4と、車体2の車軸方向に沿って(車体の進行方向に沿って)車体2に前後移動可能に支持され車体2に推力を与えるための駆動輪ユニット5と、駆動輪ユニット5が前方のキャスタ(前方キャスタ)3又は後方のキャスタ(後方キャスタ)4のいずれか一方の方向に走行移動したときに他方のキャスタを車軸方向に回転するようにロックすると共に一方のキャスタを縦軸回りに旋回自在に解除するキャスタロック解除手段6とを備えて構成されている。
【0013】
車体2は、フレーム材を矩形枠状に組み付けて形成されており、底部に駆動輪ユニット5を前後にスライド自在に支持するための支持レール7を有する。支持レール7は、断面コ字状に形成された一対の鋼材製のフレーム部材からなり、それぞれのフレーム部材のコ字状に開く開口同士を所定の間隔を隔てつつ向かい合わせて形成されている。そして、それぞれのフレーム部材の内部に後述する駆動輪ユニット5のスライダ8の両側を収容することで駆動輪ユニット5を前後スライド可能に支持するようになっている。また、車体2には、駆動輪ユニット5に電力を供給するためのバッテリ9と、駆動輪ユニット5を手動操作あるいは遠隔操作するための制御盤10とが設けられている。
【0014】
キャスタ3,4は、車体2の前後左右の四隅にそれぞれ設けられている。キャスタ3,4は、車体2の底部に設けられたプレート2aに回転自在に支持され上下に延びる旋回軸11と、旋回軸11の下端に設けられ旋回軸11と一体に回転する車輪ホルダ12と、車輪ホルダ12に水平軸回り回転自在に設けられた車輪13とを備えて構成されている。
【0015】
旋回軸11は、車体2の底部を上下に貫通して支持レール7を越える高さまで延びている。旋回軸11の上端には、キャスタ3,4をロックするときにキャスタロック解除手段6に係合される被ロック部14が一体に設けられている。
【0016】
被ロック部14は、円盤の外周部を一部切り欠いた形状に形成されており、旋回軸11に径方向外方に延びるように取り付けられている。被ロック部14は縁部に、後述するキャスタロック解除手段6の係合部15に嵌合する嵌合部16と、係合部15を嵌合部16に案内するための案内部17と、係合部15が嵌合部16から離脱するときに係合部15に干渉して旋回軸11を微小角度回動させるためのリリース用受部18と、係合部15が被ロック部14に接近したときに係合部15に最初に干渉して旋回軸11を微小角度回動させるためのロック用受部19とを有する。
【0017】
車輪13は、旋回軸11の直下から水平方向にずれた位置で接地するように車輪ホルダ12に枢支されており(旋回軸11に対してねじれの位置にあり)、走行するときには常に旋回軸11に追従するようになっている。
【0018】
駆動輪ユニット5は、支持レール7に前後スライド自在に支持された矩形板状のスライダ8と、スライダ8の下部に一体に設けられ後述する駆動輪制御手段20を収納する制御ボックス部21と、制御ボックス部21の下部に縦軸回り回転自在に、かつ、下方に弾発付勢して設けられた自走部22と、スライダ8に支持フレーム23を介して設けられ後述するキャスタロック解除手段6に係合されるユニット係合部24とを備えて構成されている。
【0019】
自走部22は、駆動源たるモータ(サーボモータ(図示せず))と、モータにチェーン及びスプロケット等の動力伝達機構25を介して連結された回転自在な駆動輪26と、予め走行路上に設けられたガイド線27の記録を読み取るための読み取り部(図示せず)とを備える。駆動輪26は、左右に一輪ずつ並列に配置されており、それぞれの駆動輪26は別々のモータで回転駆動されるようになっている。そして、左右の駆動輪26に適宜回転差を与えることで操舵できるようになっている。読み取り部は、制御ボックス部21内の駆動輪制御手段20に電気的に接続されており、磁気テープなどからなるガイド線27から読み取った情報を駆動輪制御手段20に伝達するようになっている。
【0020】
駆動輪制御手段20は、具体的にはマイクロコンピュータからなり、制御盤10から送られる命令や、ガイド線27から得られた情報をもとにモータの起動、停止、回転速度の調節、回転方向の転換等の制御を行うことで、駆動輪26の走行方向の操舵を制御すると共に前後駆動制御するようになっている。
【0021】
ユニット係合部24は、上下に延びるピンからなり、駆動輪ユニット5が車体2に対して前後方向に移動するときに後述するキャスタロック解除手段6のレバー28に干渉してレバー28を回動させるようになっている。
【0022】
また、駆動輪ユニット5と車体2には、駆動輪ユニット5が急停止したときに車体2が惰性で先行してしまうのを防ぐためのストッパ装置29が設けられている。ストッパ装置29は、駆動輪ユニット5に振り子31を前後方向揺動自在に設けると共に、振り子31が振り上がったときに振り子31に係合される掛け部33を車体2に設けてなるものである。具体的には、ストッパ装置29は、支持フレーム23上に起立して設けられた支柱30と、支柱30の上部に前後方向揺動自在に吊り下げられた振り子31と、振り子31の前後両側に上方に突起して設けられた爪部32と、車体2に設けられ駆動輪ユニット5が急停車したときに振り子31と共に揺れ上がる爪部32に係合される掛け部33とからなる。
【0023】
キャスタロック解除手段6は、駆動輪ユニット5に係合され駆動輪ユニット5が前進したときに後方キャスタ4に係合し、後退したときに後方キャスタ4から離脱する後方リンク機構34と、駆動輪ユニット5に係合され駆動輪ユニット5が後退したときに前方キャスタ3に係合し、前進したときに前方キャスタ3から離脱する前方リンク機構35とを備えて構成されている。
【0024】
前方リンク機構35と後方リンク機構34は、それぞれのキャスタ3,4に対応して車体2に回動自在に支持され駆動輪ユニット5の移動に伴って回動するレバー28と、レバー28の回動先端に設けられレバー28が所定の位置に回動したときに対応するキャスタ3,4に係脱自在に係合される係合部15とを備えて構成されている。
【0025】
レバー28は、長手方向の中間を縦軸回り回動自在に枢支されており、一端側を駆動輪ユニット5のユニット係合部24に長手方向スライド可能に係合されると共に他端を自由端に形成されている。そして、レバー28の他端にはローラ状の係合部15が縦軸回り回転自在に設けられている。また、レバー28は、キャスタ3,4の被ロック部14に対して接線方向から近接離間するように軸36の位置を決定されており、被ロック部14に接近するときに係合部15でロック用受部19を周方向に押すと共に、被ロック部14から離間するときに係合部15でリリース用受部18を周方向に押すようになっている。
【0026】
また、前方リンク機構35を構成するレバー28同士又は後方リンク機構34を構成するレバー28同士は、ユニット係合部24の前方又は後方で交差するように高さをずらして配置されている。そして特に、上側に位置されるレバー28はキャスタ3,4の被ロック部14に対しても上側に位置され、下側に位置されるレバー28は被ロック部14に対しても下側に位置されており、それぞれキャスタ3,4の被ロック部14に干渉しないようになっている。
【0027】
また、車体2にはレバー28の自由端を被ロック部14から離す方向の回動範囲を規制するためのレバー止め37が設けられている。
【0028】
次に本実施の形態の作用を述べる。
【0029】
制御盤10を操作して無人搬送車1に前進命令を発すると、駆動輪制御手段20は各モータを回転駆動し、駆動輪ユニット5は前進を始める。図1に示すように、駆動輪ユニット5が車体2に対して移動可能な範囲で前端位置にある場合、駆動輪ユニット5の推進力は後方リンク機構34を介して車体2に伝わり、車体2は駆動輪ユニット5と一体に前進走行する。このとき、前方キャスタ3はロックを解除されて旋回軸11回り旋回自在であり、後方キャスタ4は車輪13を車軸方向に回転させるように向きをロックされており、駆動輪ユニット5は車体2の前側に移動されているため、無人搬送車1は駆動輪ユニット5の操舵に安定して従い、ガイド線27に沿って安定して走行することができる。また、車体2に積載された荷の重さはキャスタ3,4で受け、駆動輪26は常に一定の接地圧で走行するため、荷の重さの影響を受けることなく安定して操舵できる。駆動輪ユニット5の操舵は、左右の駆動輪26に適宜回転差を与えることでなされる。
【0030】
ガイド線27から停止する旨の情報を得ると、駆動輪制御手段20は各モータを停止させ、駆動輪ユニット5を停止させる。車体2は惰性によって更に前進しようとするが、駆動輪ユニット5の停止に伴ってストッパ装置29の振り子31が前方へ振れ上がり、爪部32が車体2と一体な掛け部33に掛かって車体2の前進を規制するため、駆動輪ユニット5と共に車体2を停止させることができる。
【0031】
そして、駆動輪制御手段20は、後退する旨の命令を受けると、それぞれのモータを逆転させ、駆動輪ユニット5を後退移動させる。図4に示すように、駆動輪ユニット5が後退を始めると、後方リンク機構34を構成するそれぞれのレバー28は自由端を車幅方向外側へ移動させるようにして回動し、被ロック部14から離脱される。このとき、嵌合部16に嵌合していた係合部15はリリース用受部18を接線方向に押して被ロック部14を微小回動させ、それぞれの車輪13を車幅方向内側へ移動させて車軸方向に対して傾かせる。また、前方リンク機構35を構成するそれぞれのレバー28は、自由端を前方キャスタ3に接近させるように回動し、係合部15をロック用受部19に当てる。このとき、係合部15はロック用受部19を接線方向に押すため、前方キャスタ3は車輪13を車軸に対して傾かせるように回動する。そして、レバー28は、係合部15を案内部17に当てて回動を止められる。
【0032】
駆動輪ユニット5がさらに後退すると、駆動輪ユニット5の推進力は前方リンク機構35を介して車体2に伝わり、車体2を後退させ始める。車体2が後退を始めると、キャスタ3,4はそれぞれの車輪13を旋回軸11の前方に移動させて後方へ向けるように回動(調心)される。このとき、前方キャスタ3は案内部17を係合部15に当接させながら回動し、嵌合部16と係合部15の位置が重なったときに嵌合部16に係合部15を嵌合させる。これにより、前方キャスタ3がロックされる。
【0033】
そして、駆動輪ユニット5は車体2に対する後端位置に至って推進力を車体2に伝え、後方キャスタ4はロックを解除されて旋回軸11回り旋回自在であり、前方キャスタ3は車輪13を車軸方向に回転させるように向きをロックされているため、無人搬送車1は前進時と同様に駆動輪ユニット5の操舵に安定して従い、ガイド線27に沿って安定して走行することができる。
【0034】
このように、車体2の走行方向前方と後方とにそれぞれ縦軸(旋回軸11)回りに旋回自在に支持された前方キャスタ3と後方キャスタ4と、車体2の車軸方向に沿って前後移動自在に支持された駆動輪ユニット5と、駆動輪ユニット5が前方キャスタ3又は後方キャスタ4のいずれか一方の方向に走行移動したときに他方のキャスタを車軸方向に回転するようにロックする(車輪13を進行方向に向けてそのキャスタの旋回をロックする)と共に一方のキャスタを縦軸回りに旋回自在に解除する(旋回をフリーにする)キャスタロック解除手段6とを備えて無人搬送車1を構成したため、前進時には駆動輪ユニット5を前方へ移動させられると共に、後方キャスタ4のみの旋回をロックして前方キャスタ3の旋回をフリーにでき、後退時には駆動輪ユニット5を後方へ移動させられると共に、前方キャスタ3のみの旋回をロックして後方キャスタ4の旋回をフリーにでき、前進、後退のいずれにおいても良好な操舵性を得ることができる。
【0035】
また、キャスタロック解除手段6を、駆動輪ユニット5に係合され駆動輪ユニット5が前進したときに後方キャスタ4に係合し、後退したときに後方キャスタ4から離脱する後方リンク機構34と、駆動輪ユニット5に係合され駆動輪ユニット5が後退したときに前方キャスタ3に係合し、前進したときに前方キャスタ3から離脱する前方リンク機構35とを備えて構成したため、キャスタ3,4のロック切換を特に専用の駆動源を必要とすることなく確実に行うことができる。
【0036】
そして、前方リンク機構35と後方リンク機構34は、車体2に回動自在に支持され駆動輪ユニット5の移動に伴って回動するレバー28と、レバー28に設けられレバー28が所定の位置に回動したときに前方キャスタ3又は後方キャスタ4に係合される係合部15とを備えたものとしたため、前方リンク機構35と後方リンク機構34とを簡易な構造にできる。
【0037】
また、比較的高価な駆動輪ユニット5を前後進兼用とし、駆動輪ユニット5の推進力を利用してロック切換を行うようにしたため、ロック切換のための駆動源を省くことができ、上述の無人搬送車40より低いコストで製作できる。
【0038】
なお、キャスタ3,4は前後2輪ずつの4輪に限るものではなく、少なくとも車体2の前方と後方にそれぞれ1輪以上あればよい。
【0039】
また、駆動輪ユニット5は、車体2の重心を前後に越えて走行できるように車体2に設けると、駆動輪ユニット5で車体2を牽引するような状態にでき、更に良好な操舵性を得ることができる。このとき、車体2に積荷を加味した重心位置をも前後に越えて走行できるように車体2に駆動輪ユニット5を設けると更によい。
【0040】
【発明の効果】
以上要するに本発明によれば、次のような優れた効果を奏する。
(1)前後進のいずれにおいても安定した操舵ができる。
【図面の簡単な説明】
【図1】本発明の好適実施の形態を示す無人搬送車をバッテリとキャスタロック解除手段との間で切断して見下ろした平面断面図である。
【図2】図1の背面図である。
【図3】図1の側面図である。
【図4】駆動輪ユニットが前後に反転走行を始めた無人搬送車をバッテリとキャスタロック解除手段との間で切断して見下ろした平面断面図である。
【図5】従来の無人搬送車の平面図である。
【符号の説明】
1 無人搬送車
2 車体
3 前方キャスタ
4 後方キャスタ
5 駆動輪ユニット
6 キャスタロック解除手段
15 係合部
20 駆動輪制御手段
26 駆動輪
27 ガイド線
28 レバー
34 後方リンク機構
35 前方リンク機構
【発明の属する技術分野】
本発明は、走行路上に設けられたガイド線に沿って自動走行する無人搬送車に関するものである。
【0002】
【従来の技術】
一般に無人搬送車は、車両を安定して操舵するために進行方向前側のキャスタ(前方キャスタ)を旋回自在とし、後側のキャスタ(後方キャスタ)を固定して走行するように構成されている。ここで、スペースの制約上、無人搬送車を方向転換せずにそのまま後退させる必要が生じる場合もある。このような場合、先行する後方キャスタが向きを固定され、追従する前方キャスタが旋回自在となるために、安定した操舵ができず、走行ラインから外れてしまうという問題があった。
【0003】
このような問題を解決する技術としては、特許文献1及び特許文献2に記載のものがある。
【0004】
図5に示すように、特許文献1に記載の無人搬送車40は、車体41の四隅に配置された縦軸回り旋回自在なキャスタ42,43と、これらキャスタ42,43の旋回を切換自在にロックするロック手段44とを備えている。そして、ロック手段44は、前進時に後方キャスタ43のみをロックし、後退時に前方キャスタ42のみをロックすることで操舵性を向上させるように機能する。
【0005】
【特許文献1】
特許第3222772号公報
【特許文献2】
特許第3222809号公報
【0006】
【発明が解決しようとする課題】
しかしながら、特許文献1に記載の無人搬送車40は、車体中央部に配置された駆動輪45を正反転させることで前後進するようになっているため、操舵の安定性が十分でなく、改良の余地が残されていた。すなわち、一般に駆動輪45を進行方向側に偏らせるほど良好な操舵性を得られるが、駆動輪45を車体中央に配置すると進行方向側に偏らせた場合ほど良好な操舵性を得られなかった。
【0007】
そこで、本発明の目的は、上記課題を解決し、前後進のいずれにおいても安定した操舵ができる無人搬送車を提供することにある。
【0008】
【課題を解決するための手段】
上記目的を達成するために本発明は、車体の走行方向前方と後方とにそれぞれ縦軸回りに旋回自在に支持された前方キャスタと後方キャスタと、上記車体の車軸方向に沿って前後に自在に支持され、駆動源により前後方向に走行自在に支持された駆動輪を有し、かつ、予め走行路上に設けられたガイド線の記録を読み取り上記駆動輪の走行方向の操舵を制御すると共に前後駆動制御する駆動輪制御手段を有する駆動輪ユニットと、該駆動輪ユニットが上記前方キャスタ又は後方キャスタのいずれか一方の方向に走行移動したときに他方のキャスタを車軸方向に回転するようにロックすると共に上記一方のキャスタを上記縦軸回りに旋回自在に解除するキャスタロック解除手段とを備えたものである。
【0009】
また、上記キャスタロック解除手段は、上記駆動輪ユニットに係合され駆動輪ユニットが前進したときに上記後方キャスタに係合し、後退したときに後方キャスタから離脱する後方リンク機構と、上記駆動輪ユニットに係合され駆動輪ユニットが後退したときに上記前方キャスタに係合し、前進したときに前方キャスタから離脱する前方リンク機構とを備えるとよい。
【0010】
そして、上記前方リンク機構と後方リンク機構は、上記車体に回動自在に支持され上記駆動輪ユニットの移動に伴って回動するレバーと、該レバーに設けられレバーが所定の位置に回動したときに上記前方キャスタ又は後方キャスタに係合される係合部とを備えるとよい。
【0011】
【発明の実施の形態】
本発明の好適実施の形態を添付図面に基づいて詳述する。
【0012】
図1、図2及び図3に示すように、無人搬送車1は、荷(図示せず)を積載可能な車体2と、車体2の走行方向前方と後方とにそれぞれ縦軸回りに旋回自在に支持されたキャスタ3,4と、車体2の車軸方向に沿って(車体の進行方向に沿って)車体2に前後移動可能に支持され車体2に推力を与えるための駆動輪ユニット5と、駆動輪ユニット5が前方のキャスタ(前方キャスタ)3又は後方のキャスタ(後方キャスタ)4のいずれか一方の方向に走行移動したときに他方のキャスタを車軸方向に回転するようにロックすると共に一方のキャスタを縦軸回りに旋回自在に解除するキャスタロック解除手段6とを備えて構成されている。
【0013】
車体2は、フレーム材を矩形枠状に組み付けて形成されており、底部に駆動輪ユニット5を前後にスライド自在に支持するための支持レール7を有する。支持レール7は、断面コ字状に形成された一対の鋼材製のフレーム部材からなり、それぞれのフレーム部材のコ字状に開く開口同士を所定の間隔を隔てつつ向かい合わせて形成されている。そして、それぞれのフレーム部材の内部に後述する駆動輪ユニット5のスライダ8の両側を収容することで駆動輪ユニット5を前後スライド可能に支持するようになっている。また、車体2には、駆動輪ユニット5に電力を供給するためのバッテリ9と、駆動輪ユニット5を手動操作あるいは遠隔操作するための制御盤10とが設けられている。
【0014】
キャスタ3,4は、車体2の前後左右の四隅にそれぞれ設けられている。キャスタ3,4は、車体2の底部に設けられたプレート2aに回転自在に支持され上下に延びる旋回軸11と、旋回軸11の下端に設けられ旋回軸11と一体に回転する車輪ホルダ12と、車輪ホルダ12に水平軸回り回転自在に設けられた車輪13とを備えて構成されている。
【0015】
旋回軸11は、車体2の底部を上下に貫通して支持レール7を越える高さまで延びている。旋回軸11の上端には、キャスタ3,4をロックするときにキャスタロック解除手段6に係合される被ロック部14が一体に設けられている。
【0016】
被ロック部14は、円盤の外周部を一部切り欠いた形状に形成されており、旋回軸11に径方向外方に延びるように取り付けられている。被ロック部14は縁部に、後述するキャスタロック解除手段6の係合部15に嵌合する嵌合部16と、係合部15を嵌合部16に案内するための案内部17と、係合部15が嵌合部16から離脱するときに係合部15に干渉して旋回軸11を微小角度回動させるためのリリース用受部18と、係合部15が被ロック部14に接近したときに係合部15に最初に干渉して旋回軸11を微小角度回動させるためのロック用受部19とを有する。
【0017】
車輪13は、旋回軸11の直下から水平方向にずれた位置で接地するように車輪ホルダ12に枢支されており(旋回軸11に対してねじれの位置にあり)、走行するときには常に旋回軸11に追従するようになっている。
【0018】
駆動輪ユニット5は、支持レール7に前後スライド自在に支持された矩形板状のスライダ8と、スライダ8の下部に一体に設けられ後述する駆動輪制御手段20を収納する制御ボックス部21と、制御ボックス部21の下部に縦軸回り回転自在に、かつ、下方に弾発付勢して設けられた自走部22と、スライダ8に支持フレーム23を介して設けられ後述するキャスタロック解除手段6に係合されるユニット係合部24とを備えて構成されている。
【0019】
自走部22は、駆動源たるモータ(サーボモータ(図示せず))と、モータにチェーン及びスプロケット等の動力伝達機構25を介して連結された回転自在な駆動輪26と、予め走行路上に設けられたガイド線27の記録を読み取るための読み取り部(図示せず)とを備える。駆動輪26は、左右に一輪ずつ並列に配置されており、それぞれの駆動輪26は別々のモータで回転駆動されるようになっている。そして、左右の駆動輪26に適宜回転差を与えることで操舵できるようになっている。読み取り部は、制御ボックス部21内の駆動輪制御手段20に電気的に接続されており、磁気テープなどからなるガイド線27から読み取った情報を駆動輪制御手段20に伝達するようになっている。
【0020】
駆動輪制御手段20は、具体的にはマイクロコンピュータからなり、制御盤10から送られる命令や、ガイド線27から得られた情報をもとにモータの起動、停止、回転速度の調節、回転方向の転換等の制御を行うことで、駆動輪26の走行方向の操舵を制御すると共に前後駆動制御するようになっている。
【0021】
ユニット係合部24は、上下に延びるピンからなり、駆動輪ユニット5が車体2に対して前後方向に移動するときに後述するキャスタロック解除手段6のレバー28に干渉してレバー28を回動させるようになっている。
【0022】
また、駆動輪ユニット5と車体2には、駆動輪ユニット5が急停止したときに車体2が惰性で先行してしまうのを防ぐためのストッパ装置29が設けられている。ストッパ装置29は、駆動輪ユニット5に振り子31を前後方向揺動自在に設けると共に、振り子31が振り上がったときに振り子31に係合される掛け部33を車体2に設けてなるものである。具体的には、ストッパ装置29は、支持フレーム23上に起立して設けられた支柱30と、支柱30の上部に前後方向揺動自在に吊り下げられた振り子31と、振り子31の前後両側に上方に突起して設けられた爪部32と、車体2に設けられ駆動輪ユニット5が急停車したときに振り子31と共に揺れ上がる爪部32に係合される掛け部33とからなる。
【0023】
キャスタロック解除手段6は、駆動輪ユニット5に係合され駆動輪ユニット5が前進したときに後方キャスタ4に係合し、後退したときに後方キャスタ4から離脱する後方リンク機構34と、駆動輪ユニット5に係合され駆動輪ユニット5が後退したときに前方キャスタ3に係合し、前進したときに前方キャスタ3から離脱する前方リンク機構35とを備えて構成されている。
【0024】
前方リンク機構35と後方リンク機構34は、それぞれのキャスタ3,4に対応して車体2に回動自在に支持され駆動輪ユニット5の移動に伴って回動するレバー28と、レバー28の回動先端に設けられレバー28が所定の位置に回動したときに対応するキャスタ3,4に係脱自在に係合される係合部15とを備えて構成されている。
【0025】
レバー28は、長手方向の中間を縦軸回り回動自在に枢支されており、一端側を駆動輪ユニット5のユニット係合部24に長手方向スライド可能に係合されると共に他端を自由端に形成されている。そして、レバー28の他端にはローラ状の係合部15が縦軸回り回転自在に設けられている。また、レバー28は、キャスタ3,4の被ロック部14に対して接線方向から近接離間するように軸36の位置を決定されており、被ロック部14に接近するときに係合部15でロック用受部19を周方向に押すと共に、被ロック部14から離間するときに係合部15でリリース用受部18を周方向に押すようになっている。
【0026】
また、前方リンク機構35を構成するレバー28同士又は後方リンク機構34を構成するレバー28同士は、ユニット係合部24の前方又は後方で交差するように高さをずらして配置されている。そして特に、上側に位置されるレバー28はキャスタ3,4の被ロック部14に対しても上側に位置され、下側に位置されるレバー28は被ロック部14に対しても下側に位置されており、それぞれキャスタ3,4の被ロック部14に干渉しないようになっている。
【0027】
また、車体2にはレバー28の自由端を被ロック部14から離す方向の回動範囲を規制するためのレバー止め37が設けられている。
【0028】
次に本実施の形態の作用を述べる。
【0029】
制御盤10を操作して無人搬送車1に前進命令を発すると、駆動輪制御手段20は各モータを回転駆動し、駆動輪ユニット5は前進を始める。図1に示すように、駆動輪ユニット5が車体2に対して移動可能な範囲で前端位置にある場合、駆動輪ユニット5の推進力は後方リンク機構34を介して車体2に伝わり、車体2は駆動輪ユニット5と一体に前進走行する。このとき、前方キャスタ3はロックを解除されて旋回軸11回り旋回自在であり、後方キャスタ4は車輪13を車軸方向に回転させるように向きをロックされており、駆動輪ユニット5は車体2の前側に移動されているため、無人搬送車1は駆動輪ユニット5の操舵に安定して従い、ガイド線27に沿って安定して走行することができる。また、車体2に積載された荷の重さはキャスタ3,4で受け、駆動輪26は常に一定の接地圧で走行するため、荷の重さの影響を受けることなく安定して操舵できる。駆動輪ユニット5の操舵は、左右の駆動輪26に適宜回転差を与えることでなされる。
【0030】
ガイド線27から停止する旨の情報を得ると、駆動輪制御手段20は各モータを停止させ、駆動輪ユニット5を停止させる。車体2は惰性によって更に前進しようとするが、駆動輪ユニット5の停止に伴ってストッパ装置29の振り子31が前方へ振れ上がり、爪部32が車体2と一体な掛け部33に掛かって車体2の前進を規制するため、駆動輪ユニット5と共に車体2を停止させることができる。
【0031】
そして、駆動輪制御手段20は、後退する旨の命令を受けると、それぞれのモータを逆転させ、駆動輪ユニット5を後退移動させる。図4に示すように、駆動輪ユニット5が後退を始めると、後方リンク機構34を構成するそれぞれのレバー28は自由端を車幅方向外側へ移動させるようにして回動し、被ロック部14から離脱される。このとき、嵌合部16に嵌合していた係合部15はリリース用受部18を接線方向に押して被ロック部14を微小回動させ、それぞれの車輪13を車幅方向内側へ移動させて車軸方向に対して傾かせる。また、前方リンク機構35を構成するそれぞれのレバー28は、自由端を前方キャスタ3に接近させるように回動し、係合部15をロック用受部19に当てる。このとき、係合部15はロック用受部19を接線方向に押すため、前方キャスタ3は車輪13を車軸に対して傾かせるように回動する。そして、レバー28は、係合部15を案内部17に当てて回動を止められる。
【0032】
駆動輪ユニット5がさらに後退すると、駆動輪ユニット5の推進力は前方リンク機構35を介して車体2に伝わり、車体2を後退させ始める。車体2が後退を始めると、キャスタ3,4はそれぞれの車輪13を旋回軸11の前方に移動させて後方へ向けるように回動(調心)される。このとき、前方キャスタ3は案内部17を係合部15に当接させながら回動し、嵌合部16と係合部15の位置が重なったときに嵌合部16に係合部15を嵌合させる。これにより、前方キャスタ3がロックされる。
【0033】
そして、駆動輪ユニット5は車体2に対する後端位置に至って推進力を車体2に伝え、後方キャスタ4はロックを解除されて旋回軸11回り旋回自在であり、前方キャスタ3は車輪13を車軸方向に回転させるように向きをロックされているため、無人搬送車1は前進時と同様に駆動輪ユニット5の操舵に安定して従い、ガイド線27に沿って安定して走行することができる。
【0034】
このように、車体2の走行方向前方と後方とにそれぞれ縦軸(旋回軸11)回りに旋回自在に支持された前方キャスタ3と後方キャスタ4と、車体2の車軸方向に沿って前後移動自在に支持された駆動輪ユニット5と、駆動輪ユニット5が前方キャスタ3又は後方キャスタ4のいずれか一方の方向に走行移動したときに他方のキャスタを車軸方向に回転するようにロックする(車輪13を進行方向に向けてそのキャスタの旋回をロックする)と共に一方のキャスタを縦軸回りに旋回自在に解除する(旋回をフリーにする)キャスタロック解除手段6とを備えて無人搬送車1を構成したため、前進時には駆動輪ユニット5を前方へ移動させられると共に、後方キャスタ4のみの旋回をロックして前方キャスタ3の旋回をフリーにでき、後退時には駆動輪ユニット5を後方へ移動させられると共に、前方キャスタ3のみの旋回をロックして後方キャスタ4の旋回をフリーにでき、前進、後退のいずれにおいても良好な操舵性を得ることができる。
【0035】
また、キャスタロック解除手段6を、駆動輪ユニット5に係合され駆動輪ユニット5が前進したときに後方キャスタ4に係合し、後退したときに後方キャスタ4から離脱する後方リンク機構34と、駆動輪ユニット5に係合され駆動輪ユニット5が後退したときに前方キャスタ3に係合し、前進したときに前方キャスタ3から離脱する前方リンク機構35とを備えて構成したため、キャスタ3,4のロック切換を特に専用の駆動源を必要とすることなく確実に行うことができる。
【0036】
そして、前方リンク機構35と後方リンク機構34は、車体2に回動自在に支持され駆動輪ユニット5の移動に伴って回動するレバー28と、レバー28に設けられレバー28が所定の位置に回動したときに前方キャスタ3又は後方キャスタ4に係合される係合部15とを備えたものとしたため、前方リンク機構35と後方リンク機構34とを簡易な構造にできる。
【0037】
また、比較的高価な駆動輪ユニット5を前後進兼用とし、駆動輪ユニット5の推進力を利用してロック切換を行うようにしたため、ロック切換のための駆動源を省くことができ、上述の無人搬送車40より低いコストで製作できる。
【0038】
なお、キャスタ3,4は前後2輪ずつの4輪に限るものではなく、少なくとも車体2の前方と後方にそれぞれ1輪以上あればよい。
【0039】
また、駆動輪ユニット5は、車体2の重心を前後に越えて走行できるように車体2に設けると、駆動輪ユニット5で車体2を牽引するような状態にでき、更に良好な操舵性を得ることができる。このとき、車体2に積荷を加味した重心位置をも前後に越えて走行できるように車体2に駆動輪ユニット5を設けると更によい。
【0040】
【発明の効果】
以上要するに本発明によれば、次のような優れた効果を奏する。
(1)前後進のいずれにおいても安定した操舵ができる。
【図面の簡単な説明】
【図1】本発明の好適実施の形態を示す無人搬送車をバッテリとキャスタロック解除手段との間で切断して見下ろした平面断面図である。
【図2】図1の背面図である。
【図3】図1の側面図である。
【図4】駆動輪ユニットが前後に反転走行を始めた無人搬送車をバッテリとキャスタロック解除手段との間で切断して見下ろした平面断面図である。
【図5】従来の無人搬送車の平面図である。
【符号の説明】
1 無人搬送車
2 車体
3 前方キャスタ
4 後方キャスタ
5 駆動輪ユニット
6 キャスタロック解除手段
15 係合部
20 駆動輪制御手段
26 駆動輪
27 ガイド線
28 レバー
34 後方リンク機構
35 前方リンク機構
Claims (3)
- 車体の走行方向前方と後方とにそれぞれ縦軸回りに旋回自在に支持された前方キャスタと後方キャスタと、上記車体の車軸方向に沿って前後に自在に支持され、駆動源により前後方向に走行自在に支持された駆動輪を有し、かつ、予め走行路上に設けられたガイド線の記録を読み取り上記駆動輪の走行方向の操舵を制御すると共に前後駆動制御する駆動輪制御手段を有する駆動輪ユニットと、該駆動輪ユニットが上記前方キャスタ又は後方キャスタのいずれか一方の方向に走行移動したときに他方のキャスタを車軸方向に回転するようにロックすると共に上記一方のキャスタを上記縦軸回りに旋回自在に解除するキャスタロック解除手段とを備えたことを特徴とする無人搬送車。
- 上記キャスタロック解除手段は、上記駆動輪ユニットに係合され駆動輪ユニットが前進したときに上記後方キャスタに係合し、後退したときに後方キャスタから離脱する後方リンク機構と、上記駆動輪ユニットに係合され駆動輪ユニットが後退したときに上記前方キャスタに係合し、前進したときに前方キャスタから離脱する前方リンク機構とを備えた請求項1記載の無人搬送車。
- 上記前方リンク機構と後方リンク機構は、上記車体に回動自在に支持され上記駆動輪ユニットの移動に伴って回動するレバーと、該レバーに設けられレバーが所定の位置に回動したときに上記前方キャスタ又は後方キャスタに係合される係合部とを備えた請求項2記載の無人搬送車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003044146A JP2004249896A (ja) | 2003-02-21 | 2003-02-21 | 無人搬送車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003044146A JP2004249896A (ja) | 2003-02-21 | 2003-02-21 | 無人搬送車 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004249896A true JP2004249896A (ja) | 2004-09-09 |
Family
ID=33026935
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003044146A Pending JP2004249896A (ja) | 2003-02-21 | 2003-02-21 | 無人搬送車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004249896A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009073235A (ja) * | 2007-09-19 | 2009-04-09 | Isuzu Motors Ltd | 無人搬送車 |
| CN104179943A (zh) * | 2014-08-13 | 2014-12-03 | 成都四威高科技产业园有限公司 | 一种agv自动提升机构自锁装置 |
| KR101561898B1 (ko) | 2013-07-11 | 2015-10-22 | (주)트라비스엘리베이터 | 컨테이너 대차 이송 장치 |
| EP4197940A4 (en) * | 2020-10-30 | 2024-02-21 | Beijing Jingdong Qianshi Technology Co., Ltd. | MATERIAL VEHICLE, TOWING DEVICE AND SYSTEM AND METHOD FOR CONTROLLING THE BIDIRECTIONAL TRAVEL OF A MATERIAL VEHICLE |
-
2003
- 2003-02-21 JP JP2003044146A patent/JP2004249896A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009073235A (ja) * | 2007-09-19 | 2009-04-09 | Isuzu Motors Ltd | 無人搬送車 |
| KR101561898B1 (ko) | 2013-07-11 | 2015-10-22 | (주)트라비스엘리베이터 | 컨테이너 대차 이송 장치 |
| CN104179943A (zh) * | 2014-08-13 | 2014-12-03 | 成都四威高科技产业园有限公司 | 一种agv自动提升机构自锁装置 |
| EP4197940A4 (en) * | 2020-10-30 | 2024-02-21 | Beijing Jingdong Qianshi Technology Co., Ltd. | MATERIAL VEHICLE, TOWING DEVICE AND SYSTEM AND METHOD FOR CONTROLLING THE BIDIRECTIONAL TRAVEL OF A MATERIAL VEHICLE |
| US12350966B2 (en) * | 2020-10-30 | 2025-07-08 | Beijing Jingdong Qianshi Technology Co., Ltd. | Material vehicle, traction apparatus and system, and method for controlling bidirectional traveling of material vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI753563B (zh) | 一種叉車式自動導引運輸車 | |
| US5019009A (en) | Toy car chassis intermittent tilt and steering structure | |
| JP4264824B2 (ja) | 台車牽引車 | |
| JP2009061908A (ja) | 自動搬送装置 | |
| KR102324778B1 (ko) | 자율주행 차량 및 자율주행 차량의 시트 회전방법 | |
| JP3511617B2 (ja) | 無人運搬車 | |
| JP2004249896A (ja) | 無人搬送車 | |
| JP4200785B2 (ja) | 無人搬送車 | |
| JPH0671056A (ja) | 車両玩具の駆動装置 | |
| JPS60248475A (ja) | 横行可能の無人車 | |
| KR102252698B1 (ko) | 주차차량의 휴대용 견인장치 | |
| JPH05270396A (ja) | 無軌条式無人搬送台車 | |
| JPH11240446A (ja) | 無人搬送車 | |
| JP3222772B2 (ja) | 自走式搬送車 | |
| JP4238810B2 (ja) | 搬送用自走車及び自在輪付き車両 | |
| CN113619537A (zh) | 无人驾驶汽车、无人驾驶汽车的作业方法和作业系统 | |
| KR20170109960A (ko) | 착탈 가능한 탑승체를 구비하는 전동 카트 | |
| JP2010000842A (ja) | キャスター | |
| JP7511228B2 (ja) | 走行台車 | |
| JP3000522B2 (ja) | 誘導式運搬車 | |
| JPH0429672Y2 (ja) | ||
| JP4211431B2 (ja) | 無人搬送車 | |
| JPH1011138A (ja) | 無人搬送台車 | |
| JPH08118904A (ja) | 自在車輪の向き変向装置 | |
| JPH0241683Y2 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080527 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080603 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20081028 |