JP2004306033A - 基板洗浄装置 - Google Patents
基板洗浄装置 Download PDFInfo
- Publication number
- JP2004306033A JP2004306033A JP2004201712A JP2004201712A JP2004306033A JP 2004306033 A JP2004306033 A JP 2004306033A JP 2004201712 A JP2004201712 A JP 2004201712A JP 2004201712 A JP2004201712 A JP 2004201712A JP 2004306033 A JP2004306033 A JP 2004306033A
- Authority
- JP
- Japan
- Prior art keywords
- cleaning
- substrate
- cassette
- brush
- scan
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Cleaning In General (AREA)
- Cleaning By Liquid Or Steam (AREA)
Abstract
【課題】ダウンタイムの発生が少なく、効果的な洗浄処理を行うことができる基板洗浄装置を提供する。
【解決手段】装置の立ち上げ時に作業者がブラシスキャンの開始位置および終了位置等のティーチング処理を行った(ステップS1)後、作業者が各カセットをカセットステージ11に投入し(ステップS2)、その後、作業者が対象とするカセットに応じてブラシ回転速度、洗浄スキャン速度、洗浄スキャン幅等が異なった洗浄処理レシピを設定する(ステップS3)。その後、順次、カセットごとにそれに対応した洗浄処理レシピに従ってそれらのカセットに収納された基板に対して洗浄処理が自動的に行われていく。そのため、カセット毎に洗浄スキャン速度の設定が必要ないため、ダウンタイムの発生が少なく、効果的な洗浄処理を行うことができる。
【選択図】図7
【解決手段】装置の立ち上げ時に作業者がブラシスキャンの開始位置および終了位置等のティーチング処理を行った(ステップS1)後、作業者が各カセットをカセットステージ11に投入し(ステップS2)、その後、作業者が対象とするカセットに応じてブラシ回転速度、洗浄スキャン速度、洗浄スキャン幅等が異なった洗浄処理レシピを設定する(ステップS3)。その後、順次、カセットごとにそれに対応した洗浄処理レシピに従ってそれらのカセットに収納された基板に対して洗浄処理が自動的に行われていく。そのため、カセット毎に洗浄スキャン速度の設定が必要ないため、ダウンタイムの発生が少なく、効果的な洗浄処理を行うことができる。
【選択図】図7
Description
この発明は、回転する半導体ウエハ、フォトマスク用ガラス基板、液晶表示用ガラス基板、光ディスク用基板等の基板(以下「基板」という。)表面に対し洗浄ヘッドを支持する支持アームを相対的に移動させて基板の洗浄スキャンを行う基板洗浄装置に関する。
従来から、基板洗浄装置とりわけスピンスクラバにおいては基板を回転しながらブラシを押圧して回転しつつ、ブラシがその先端に取り付けられた支持アームを回動することにより洗浄スキャン動作を行い基板の洗浄を行っている。
このような装置においては基板の膜種や膜厚等の特性に応じてカセット単位でブラシの洗浄スキャン速度を設定して洗浄処理を行っている。
ところで、上記のような洗浄スキャン速度の設定作業においては、例えばカセット毎に基板種類が異なる場合に1つのカセットにおける基板の洗浄処理の終了ごとに装置を停止させて、洗浄スキャン速度の設定をダイヤル設定を手動操作して変更しているため、ダウンタイムが頻繁に発生し、また人為的な設定ミスにより基板の特性に応じた効果的な洗浄を行うことができなかった。
この発明は、従来技術における上述の問題の克服を意図しており、ダウンタイムの発生が少なく、効果的な基板洗浄を行うことができる基板洗浄装置を提供することを目的とする。
上記課題を解決するため、請求項1の発明は、洗浄ヘッドを支持する支持アームを回転する基板表面に対して相対的に移動させて基板の洗浄スキャンを行い基板を洗浄する基板洗浄装置において、前記洗浄ヘッドについての複数の洗浄スキャン幅を記憶する記憶手段と、予め前記記憶手段に記憶された前記複数の洗浄スキャン幅のうちから任意のものを選択して指定する指定手段と、前記指定手段から指定された洗浄スキャン幅に基づいて洗浄スキャンの開始位置および終了位置を制御する制御手段と、を備える。
また、請求項2の発明は、請求項1の発明に係る基板洗浄装置において、前記洗浄ヘッドをブラシとしている。
また、請求項3の発明は、請求項1の発明に係る基板洗浄装置において、前記洗浄ヘッドを高圧の洗浄液を吐出するジェット洗浄ヘッドとしている。
また、請求項4の発明は、請求項1の発明に係る基板洗浄装置において、前記洗浄ヘッドを超音波洗浄ヘッドとしている。
本発明によれば、予め記憶手段に記憶された複数の洗浄スキャン幅のうちから任意のものを選択して指定手段から指定し、それに基づいて制御手段が洗浄スキャンの開始位置および終了位置を制御するので、洗浄スキャン幅を容易に変更でき、それにより、ダウンタイムの発生を抑えることができる。また、基板の特性に応じた洗浄スキャン幅を選択することができるので、効果的な基板洗浄を行うことができる。
<1.実施の形態における機構的構成と装置配列>
図1(a)は第1の実施の形態の基板洗浄装置1の平面図であり、図1(b)はその正面図である。以下、図1を用いてこの基板洗浄装置1について説明していく。
図1(a)は第1の実施の形態の基板洗浄装置1の平面図であり、図1(b)はその正面図である。以下、図1を用いてこの基板洗浄装置1について説明していく。
図1に示すようにこの装置は、主にインデクサ10、基板搬送部20、スピンスクラバ30、メインコンピュータ40、メインパネル50、ティーチングパネル60、レシピ設定パネル70を備えている。
インデクサ10はカセットCSをその投入時に載置するカセットステージ11およびそれらのカセットCSと基板搬送部20の間で基板の搬送を行う搬送ユニット12を備えている。基板搬送部20は図示しない基板搬送ロボットを備えており、インデクサ10とスピンスクラバ30との間の基板の搬送を行う。スピンスクラバ30は後に詳述するようにカップ内に基板を保持して回転しながら洗浄する。メインコンピュータ40はその内部にメモリを備え、上記各部の制御を行う。
さらに、この装置は後に詳述する3種のコンソールパネルであるメインパネル50、ティーチングパネル60、レシピ設定パネル70を備えている。
そして、以上のような装置構成により、インデクサ10に投入される各カセットCSの基板Wを搬送ユニット12により取り出し、基板搬送部20に受け渡し、基板搬送部20は基板搬送ロボットによりその基板をスピンスクラバ30に搬送し、そこでその基板を洗浄し、洗浄が終了すると逆の手順でその基板をもとのカセットCSに戻すといった動作を各基板に対して順次繰り返して、インデクサ10に投入された各カセットCSの基板Wを順次洗浄する。
つぎに、この実施の形態のスピンスクラバ30を図面を用いて説明する。図2はスピンスクラバ30の要部の概略縦断面図であり、図3は平面図である。
スピンチャック31は電動モータ311がその駆動軸周りに設けられた軸受け312を介して鉛直方向の軸芯周りで回転する回転軸313に連結されており、さらに、その回転軸上端には基板Wを吸着保持する回転台314を備えるとともに、回転軸313の内部には軸方向に沿って図示しない真空経路が設けられており、その一端は回転台314上面に設けられた図示しない吸引口に連結されているとともに、他端は軸受け312を通じて外部の真空配管315に連結され、真空配管315は1つのポートが大気解放された三方弁316を介して外部の真空ラインに連結されている。
そして、回転台314上面に基板Wを載置した状態で、吸引口から真空経路等を通じて真空源に連通させることによって基板Wを吸着保持した状態で電動モータ311の駆動により鉛直方向の軸芯周りで回転する。
カップ32はスピンチャック31およびそれによって保持された基板W等の周囲を覆うように設けられ、図示しない昇降駆動機構によって昇降可能となっており、洗浄処理中に上昇して基板Wから飛散する洗浄液の飛沫の外部への飛散を防止し、基板Wの搬出入時には降下、退避する。
バックリンスノズル33はカップ32の内部に設けられており、スピンチャック31に保持された基板Wの裏面に純水等の洗浄液を噴射する。
リンスノズル34はカップ32の側方に設けられており、基板Wの回転中心側に向けて純水などの洗浄液を噴射供給する。
ブラシ部35はカップ32側方に設けられている。図4はブラシ部35の機構的構成を示す図である。図4に示すように、アングル形状の支持アーム351の回転支軸352が前述のスピンチャック31、カップ32、バックリンスノズル33、リンスノズル34が設けられた基台36に固設された支持体353に昇降および鉛直方向の第1の軸芯P1周りで回動可能に設けられるとともに、その回転筒354に昇降のみ可能に設けられ、その支持アーム351の先端部分の下部に、鉛直方向の第2の軸芯P2周りで回転可能に、基板W表面を洗浄する洗浄ブラシ355が設けられている。
さらに、回転支軸352の下方には、出力ロッド356aを回転支軸352の下端に押し当てて進退させることにより支持アーム351を昇降させる昇降用エアシリンダ356が設けられている。また、回転筒354にタイミングベルト357を介してアーム回動モータ358が連動連結されている。図中、エンコーダ359は、洗浄ブラシ355が基板Wの中心位置CP(図3参照)付近の洗浄スキャン開始位置、基板Wの外周縁位置EP(図3参照)付近の洗浄スキャン終了位置、および、基板Wの上方から外れた非洗浄時の待機位置WPのいずれにあるかを検出する。
このエンコーダの検出結果を監視しつつ、アーム回動モータ358の駆動を制御することにより後述する設定された洗浄処理レシピの「洗浄スキャン周期」や「洗浄スキャン幅」の項目に応じて、洗浄ブラシ355による洗浄スキャン周期や洗浄スキャン幅を変更することができる。
そして、バックリンスノズル33やリンスノズル34から洗浄液を回転している基板W上に噴出しつつ、基板W上方に洗浄ブラシ355が位置するように支持アーム351が移動し(図3参照)、支持アーム351が降下して基板W上面に当接又は近接した(図2参照)後、洗浄ブラシ355が回転することによって基板Wの洗浄を行う。
なお、基板Wの洗浄中、洗浄ブラシ355を回転しつつ、支持アーム351が図3の矢符A1のように基板中心付近から基板外周付近へ回動動作を行うことによって基板W上面の全面を洗浄する。この際の支持アーム351の矢符A1方向の回動を以下、洗浄スキャンと呼ぶ。
図5は支持アーム351の断面図である。支持アーム351の先端部にはブラシ回転押圧機構37が設けられている。ブラシ回転押圧機構37において、洗浄ブラシ355は角軸として形成された回転軸371下端に設けられ、ベアリング372は回転軸371の4つの側面にそれぞれ2個ずつローラ372aの外周面が当接したベアリングとなっており、回転軸371は上下方向に移動可能であるとともに、ベアリング372に取り付けられた回転体373の回転とともに回転軸371は回転可能となっている。
回転体373の外周に取り付けられたプーリ374と支持アーム351のブラシ回転モータ381に取り付けられたプーリ382との間にはタイミングベルト375が掛けられており、回転スピード可変可能なブラシ回転モータ381と連動して回転体373が回転し、その回転の駆動力がベアリング372を介して回転軸371を回転させ、それによって洗浄ブラシ355が鉛直方向を軸として回転する。ブラシ回転モータ381の回転スピードを制御することにより後述する設定された洗浄処理レシピの「ブラシ回転速度」の項目に応じて、洗浄ブラシ355の回転速度を変更することができる。
さらに、回転体373上部にはバネ376が設けられ、その上部には押圧板377が設けられている。そしてエアシリンダ378には圧力計391、電空レギュレータ392、開閉弁393を介して給排気管39が連結され、その給排気管39はエア供給源394(図6参照)に連結している。そして、圧力計391による圧力信号をもとにCPU300(図6参照)が電空レギュレータ392を制御し、エア流量を調節してエアシリンダ378に供給するエアの圧力を制御する。そして、エアシリンダ378の押圧力に応じて押圧板377が押下されることによって回転軸371が押下され、それにより洗浄ブラシ355が基板W上に押圧される圧力が制御される。
つぎに、主要部についてさらに詳細に説明していく。
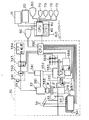
図6は第1の実施の形態の基板洗浄装置1における全体構成図である。CPU41およびメモリ42を備えたメインコンピュータ40にはメインパネル50、4機のレシピ設定パネル70、基板搬送部20の制御機構、インデクサ10の制御機構およびスピンスクラバ30のCPU300が接続されており、さらにそのCPU300には主に洗浄液供給源331,341、電動モータ311、三方弁316、昇降用エアシリンダ356、アーム回動モータ358、エンコーダ359、ブラシ回転モータ381、電空レギュレータ392、開閉弁393およびティーチングパネル60が接続されている。
以上各部のうち、メインパネル50は作業者が自動モード、手動モードの切換えや、後述する各種洗浄処理のパラメータをまとめたデータである洗浄処理レシピを新たに作成したり、洗浄処理レシピの各項目の部分的変更等を行うためのコンソールパネルである。
また、4機のレシピ設定パネル70は、それぞれカセットステージ11上の各カセット載置位置に対応しており、各カセットの基板Wの洗浄処理条件を指定するデータである洗浄処理レシピ(「洗浄処理パラメータ群」に相当)を選択指定するためのコンソールパネルである。
さらに、ティーチングパネル60はその取り付けられたスピンスクラバ30の初期設定としてスキャン開始位置および終了位置を設定する作業であるティーチングを作業者が行う際に支持アーム351の位置の移動量等を入力するためのコンソールパネルである。
そして、この装置では作業者は初期設定として予めティーチングを行っておく。より詳細にはティーチングは、図3のようにブラシアームがスキャン開始位置の初期設定としてチャック上に保持された基板Wの中心位置CPと、スキャン終了位置の初期設定として洗浄ブラシ355が基板Wの周縁に接する外周縁位置EPをティーチングしてメモリ42に記憶させる。なお、中心位置CPおよび外周縁位置EPが「基準位置」に相当する。
さらに、この装置ではティーチング以外に、洗浄処理対象の基板Wの膜種、膜厚、ブラシ種類、前工程の種類等の特性に応じて洗浄処理の各種洗浄処理のパラメータをまとめたデータである洗浄処理レシピを多数、メインコンピュータ40内のメモリ42に予め記憶している。そして、作業者はレシピ設定パネル70によって洗浄処理にあたり各カセット毎にそれに収納された基板Wの上記特性に応じた洗浄処理レシピを選択する。さらに、その洗浄処理レシピをそのまま利用することもできるが、基板Wの種類によってはさらに微妙な洗浄処理の条件を指定したい場合などには、作業者はメインパネル50により洗浄処理レシピの各項目のデータ(「洗浄処理パラメータ」に相当)を部分的に変更して設定することも可能となっている。なお、メインパネル50を洗浄処理レシピを選択指定するパネルとして使用することもできる。
具体的には、洗浄処理レシピの例としては表1〜表3のようなものが挙げられる。

これらの表に示すように、洗浄処理レシピには洗浄処理における各ステップ毎に各ステップの「時間」、「基板回転速度」、「ブラシ回転速度」、「洗浄スキャン周期」、「洗浄スキャン幅」、「薬液等」、「ブラシ荷重」といった項目が設けられている。
このうち、「ブラシ回転速度」は洗浄ブラシ355の回転速度を表わしている。なお、表3では洗浄処理中にもブラシ回転速度を0rpmに保っている。すなわち洗浄処理ブラシを回転しないとするものである。このようにこの実施の形態の装置では洗浄処理ブラシを回転しないで洗浄スキャンした方が洗浄効率がいい場合等にもレシピ変更だけで対応することができる。
また、「洗浄スキャン周期」の項目は洗浄ブラシ355の1回のスキャンに要する時間を秒単位であらわし、洗浄スキャン速度に相当するものである。この実施の形態では1回の洗浄処理に対して1回または複数回の洗浄スキャンを行うものである。例えば表1のステップ3では1回の洗浄スキャンを8秒とし、ステップ3は24秒行うものと設定されているため、洗浄スキャンは表1の場合には24/8回すなわち、3回の洗浄スキャンを行うものである。
また、「洗浄スキャン幅」の項目は洗浄対象の基板Wに対して洗浄スキャンの開始位置および終了位置がそれぞれティーチングされた基板Wの中心位置CPおよび外周縁位置EPとの相対的な位置として設定される。なお、表1〜表3において「洗浄スキャン幅」の項目における正負の符号は図3中、反時計回り方向を正としている。表1のステップ3ではティーチング開始位置である中心位置CPより10mm負側、すなわち洗浄ブラシ355外周が基板W中心にスキャンの手前側から接する位置からスキャンを開始し、ティーチング終了位置である外周縁位置EPより10mm正側、すなわち洗浄ブラシ355外周が基板W周縁に外側で接する位置で終了することを表わしている。そしてこれらの値(正負も含めて)は洗浄処理レシピごとに異なる値をとることが可能となっている。
また、「薬液等」の項目は洗浄時に基板Wの表面および裏面に洗浄液を供給する際に純水リンス、バックリンスの洗浄液の供給を指定するものである。
さらに、「ブラシ荷重」の項目は洗浄時に基板Wに当接される洗浄ブラシの押圧における荷重を表わし、実際には、前述のブラシ回転押圧機構37に対するCPUによるエア供給圧の制御値を指定するものである。表1、表2では20gであるが表3では10gと異なっており、これらは前述のブラシ回転押圧機構37のCPU300による制御により実現される。
また、このような洗浄処理レシピの選択に際して、メインパネル50には上記の表1〜表3のような洗浄処理レシピを表示させることができるとともに、その洗浄処理レシピによる基板Wの回転速度の時間変化を表わすグラフを同時に表示させることもできる。このような表示により作業者は洗浄処理レシピの特徴を捉えて、その選択を容易に行うことができる。
そして、この装置はこのような洗浄処理レシピの指定に従って動作する。このようにこの装置では容易にそれらの設定を変更することができ、その変更の度に装置を停止してティーチングを行う必要がない。
<2.実施の形態における処理手順>
図7はこの実施の形態の基板洗浄装置の洗浄処理手順を示すフローチャートである。以下、図7に従って基板洗浄処理の手順について説明していく。
図7はこの実施の形態の基板洗浄装置の洗浄処理手順を示すフローチャートである。以下、図7に従って基板洗浄処理の手順について説明していく。
まず、装置の立ち上げ時に作業者が洗浄スキャンの開始位置および終了位置を前述のように基板W中央および外周縁に設定する等のティーチング処理を行う(ステップS1)。
つぎに、作業者が各カセットをカセットステージ11に投入する(ステップS2)。
つぎに、作業者が対象とするカセットに応じて洗浄処理レシピを設定する(ステップS3)。なお、この設定は前述のように予めメモリ42に記憶された複数の洗浄処理レシピの中から選択してそのまま利用することもできるし、それに部分的な変更を加えて設定することもできる。
つぎに、自動的に洗浄対象のカセットが設定される(ステップS4)。すなわち、カセットステージ11のカセット載置順に洗浄対象のカセットが順次設定される。
つぎに、装置が自動的に基板洗浄の対象となるカセットが終了したかどうかを判断し、終了していれば洗浄処理自体を終了し、終了していなければステップS6に進む(ステップS5)。
つぎに、選択されたカセットにおいてスピンスクラバ30により、各基板Wの洗浄を行い(ステップS6)、ステップS4に戻る。
そして、ステップS4〜ステップS6の処理を繰返して各カセットの各基板Wの洗浄を行い、洗浄の対象となるカセットに対して全て洗浄したことを装置が確認するとステップS5において終了に進み洗浄処理を終了する。
以上のようにこの実施の形態の基板洗浄装置では、予めメモリ42に記憶された複数の洗浄処理レシピのうちから任意のものを選択して指定し、それに基づいてブラシ回転速度、洗浄スキャン速度および洗浄スキャン幅等を制御して基板洗浄を行うので、ブラシ回転速度、洗浄スキャン速度および洗浄スキャン幅等を容易に変更できる。
また、異なる種類の基板Wを収容したカセット毎にそれに対応した洗浄処理レシピを設定しておくことにより、洗浄処理対象のカセットが変わる度にティーチングをしたり、ブラシ回転速度や洗浄スキャン周期等の設定を変更したりする必要がないので、ダウンタイムの発生を抑えることができ、手動操作の機会が少ないので人為的ミスの発生も抑えることができる。
さらに、カセットごとの基板Wの特性に応じたブラシ回転速度、洗浄スキャン速度および洗浄スキャン幅等の洗浄処理パラメータを含んだ洗浄処理レシピを選択することができるので、基板の種類に応じた効果的な基板洗浄を行うことができる。
<3.変形例>
この実施の形態ではスピンスクラバ30においてブラシ部35による洗浄スキャンを基板Wの半径に相当する分だけ行うものとしたが、この発明はこれに限られず、基板Wの直径に相当する分を行う等その他の範囲を行うものとしてもよい。
この実施の形態ではスピンスクラバ30においてブラシ部35による洗浄スキャンを基板Wの半径に相当する分だけ行うものとしたが、この発明はこれに限られず、基板Wの直径に相当する分を行う等その他の範囲を行うものとしてもよい。
また、この実施の形態ではスピンスクラバ30においてブラシ部35による洗浄スキャンを支持アーム351を回動させて円弧状に行うものとしたが、この発明はこれに限られず、支持アームに沿ってブラシが並進移動するものとして直線状に洗浄スキャンを行う等のものとしてもよい。
また、この実施の形態では洗浄処理レシピにおいて各ステップではブラシ回転速度および洗浄スキャン速度は一定のものとして指定しているが、この発明はこれに限られず、ステップ内での初期速度と終了速度を指定して変化するものとしてもよい。
また、この実施の形態ではカセットごとに洗浄処理レシピを異なるものとしたが、この発明はこれに限られず、同一カセット内において異なる特性の基板Wを収納している場合に基板Wごとに洗浄処理レシピを異なるものを指定する等としてもよい。
また、この実施の形態では洗浄処理レシピを選択した後に各処理毎に微少な設定の変更を行えるものとしたが、この発明はこれに限られず、洗浄処理レシピは選択するのみで変更できないものとしてもよい。
また、この実施の形態では洗浄処理レシピにおいて洗浄スキャン周期の指定を含んでいるが、この発明はこれに限られず、洗浄スキャン周期の代わりにその速度を指定するものとしてもよい。
また、この実施の形態では洗浄ヘッドとして洗浄ブラシ355を備えるものとしたが、この発明はこれに限られず、高圧の洗浄液を吐出するジェット洗浄ヘッドや超音波洗浄ヘッド等のその他のものでもよい。
さらに、この実施の形態においては、回転台314を吸着式のものとしてスピンチャック31を構成しているが、この発明はこれに限られるものではなく、例えぱ、回転台に基板Wの外縁を支持する基板支持部材を複数設けるとともに、この基板支持部材の上端に基板Wの水平方向位置を規制する位置決めピンを設けて基板保持手段を成し、基板Wを回転台の上面から離隔した状態で回転可能に保持させるようにしてもよい。
1 基板洗浄装置
42 メモリ
60 ティーチングパネル
70 レシピ設定パネル
300 CPU
351 支持アーム
355 洗浄ブラシ
CP 中心位置
EP 外周縁位置
W 基板
42 メモリ
60 ティーチングパネル
70 レシピ設定パネル
300 CPU
351 支持アーム
355 洗浄ブラシ
CP 中心位置
EP 外周縁位置
W 基板
Claims (4)
- 洗浄ヘッドを支持する支持アームを回転する基板表面に対して相対的に移動させて基板の洗浄スキャンを行い基板を洗浄する基板洗浄装置であって、
前記洗浄ヘッドについての複数の洗浄スキャン幅を記憶する記憶手段と、
予め前記記憶手段に記憶された前記複数の洗浄スキャン幅のうちから任意のものを選択して指定する指定手段と、
前記指定手段から指定された洗浄スキャン幅に基づいて洗浄スキャンの開始位置および終了位置を制御する制御手段と、
を備えることを特徴とする基板洗浄装置。 - 請求項1記載の基板洗浄装置において、
前記洗浄ヘッドはブラシであることを特徴とする基板洗浄装置。 - 請求項1記載の基板洗浄装置において、
前記洗浄ヘッドは高圧の洗浄液を吐出するジェット洗浄ヘッドであることを特徴とする基板洗浄装置。 - 請求項1記載の基板洗浄装置において、
前記洗浄ヘッドは超音波洗浄ヘッドであることを特徴とする基板洗浄装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004201712A JP2004306033A (ja) | 2004-07-08 | 2004-07-08 | 基板洗浄装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004201712A JP2004306033A (ja) | 2004-07-08 | 2004-07-08 | 基板洗浄装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP11279497A Division JP3756284B2 (ja) | 1997-04-30 | 1997-04-30 | 基板洗浄装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004306033A true JP2004306033A (ja) | 2004-11-04 |
Family
ID=33475785
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004201712A Pending JP2004306033A (ja) | 2004-07-08 | 2004-07-08 | 基板洗浄装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004306033A (ja) |
-
2004
- 2004-07-08 JP JP2004201712A patent/JP2004306033A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4425913B2 (ja) | 基板洗浄方法およびコンピュータ読取可能な記憶媒体 | |
| JP6740066B2 (ja) | 基板洗浄装置、基板処理装置および基板洗浄方法 | |
| US20090199869A1 (en) | Apparatus for and method of cleaning substrate | |
| CN110651356B (zh) | 清洗装置、基板处理装置、清洗装置的维护方法、以及计算机可读取记录介质 | |
| KR20110137728A (ko) | 기판 처리 방법, 이 기판 처리 방법을 실행하기 위한 컴퓨터 프로그램이 기록된 기록 매체 및 기판 처리 장치 | |
| TWI850692B (zh) | 基板洗淨裝置 | |
| JP4744425B2 (ja) | 基板処理装置 | |
| JP6143589B2 (ja) | 基板処理装置 | |
| KR101078590B1 (ko) | 기판 세정 장치 및 그의 제어 방법 | |
| KR102553073B1 (ko) | 기판 세정 장치 및 기판 세정 방법 | |
| JP3756284B2 (ja) | 基板洗浄装置 | |
| JP3578193B2 (ja) | 基板洗浄装置 | |
| JPH10303156A (ja) | 基板洗浄装置 | |
| JP2019102571A (ja) | 基板搬送システム、基板処理装置、ハンド位置調整方法 | |
| JP2004306033A (ja) | 基板洗浄装置 | |
| JP2005072429A (ja) | 両面洗浄処理方法及び装置 | |
| JPH10303158A (ja) | 基板洗浄装置 | |
| JP2013069776A (ja) | 基板洗浄装置、基板洗浄方法および基板洗浄方法を実行するためのコンピュータプログラムが記録された記録媒体 | |
| JP2000311878A (ja) | 基板洗浄装置 | |
| JPH11297654A (ja) | 半導体ウエハの洗浄装置及びその洗浄方法 | |
| JP2021136418A (ja) | 基板処理装置および基板処理方法 | |
| JP3292367B2 (ja) | 洗浄装置及び洗浄方法 | |
| JP2010016157A (ja) | 基板洗浄装置 | |
| JP3963383B2 (ja) | 基板洗浄システムおよび基板洗浄装置 | |
| JP2000353654A (ja) | 基板処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070529 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070720 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20070720 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20071023 |