JP2005014105A - 産業用ロボット - Google Patents
産業用ロボット Download PDFInfo
- Publication number
- JP2005014105A JP2005014105A JP2003177905A JP2003177905A JP2005014105A JP 2005014105 A JP2005014105 A JP 2005014105A JP 2003177905 A JP2003177905 A JP 2003177905A JP 2003177905 A JP2003177905 A JP 2003177905A JP 2005014105 A JP2005014105 A JP 2005014105A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- arm
- shaft unit
- bracket
- industrial robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Manipulator (AREA)
Abstract
【課題】簡単な構造で、手首装置やアームの複雑な軸を自由に構成し得る産業用ロボットの提供。
【解決手段】産業用ロボットは、アーム(7)と、手首装置(6)とを有する。これらアームおよび手首装置の少なくとも1つの軸ユニット(1)の駆動装置は、減速機構を一体に組み込んだ減速機一体モータ(1a)で構成する。このモータで駆動するブラケット(2b)は、2つの減速機一体型モータ(2a,4a)を搭載可能に形成する。
【選択図】 図1
【解決手段】産業用ロボットは、アーム(7)と、手首装置(6)とを有する。これらアームおよび手首装置の少なくとも1つの軸ユニット(1)の駆動装置は、減速機構を一体に組み込んだ減速機一体モータ(1a)で構成する。このモータで駆動するブラケット(2b)は、2つの減速機一体型モータ(2a,4a)を搭載可能に形成する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、産業用ロボットの手首とアームの構造に関する。
【0002】
【従来の技術】
従来、産業用ロボットの手首装置として、2つの工具を搭載可能な構造がある(例えば、特許文献1参照)。この手首装置は、2つの手首先端を設け、駆動シャフトを4重に同軸上に配置して各手首先端の減速機を駆動している。このような構造は、駆動系に多数の複雑な部品を必要とし、また、軸構成に合わせて駆動系の部品形状が決まるため、軸構成を簡単に変更することができない。
【特許文献1】特開2002−36163号公報
【0003】
【発明が解決しようとする課題】
本発明は、手首装置やアームにおいて、複雑な構造を伴うことなく、軸を自由に構成し得る産業用ロボットの提供を目的とする。
【0004】
【課題を解決するための手段】
本発明による、アームと手首装置を有する産業用ロボットは、これらアームおよび手首装置の少なくとも1つの軸ユニットの駆動装置を、減速機構を一体に組み込んだ減速機一体モータで構成し、このモータで1つのブラケットを駆動し、このブラケットを、2つの減速機一体型モータを搭載可能に形成することを特徴とする。
この構成では、軸ユニットの駆動系は減速機一体型モータの独立したモジュールであり、別途に駆動機構の設置を要さず、軸ユニットの構造が簡単である。また、この駆動系が動かすブラケットには2つの別の駆動系を搭載して、多彩な軸構成を簡単に実現し得るので、ロボットアームならびに手首を自由に構成することができる。
【0005】
上述のモータは防滴構造であることが好ましい。こうすることによって、ロボットアームおよび手首には、防滴手段を別途設ける必要がなく、構造がさらに簡単になる。
【0006】
【発明の実施の形態】
本発明の実施の形態を、図1〜図4を参照して説明する。なお、これら図面においては、同様な構成部分に同じ参照符号を付して説明を省略する。
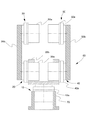
図1は本発明による産業用ロボットの要部を示し、この例では、手首装置6を本発明に従って構成して、2つのエンドエフェクタを搭載可能にしている。
【0007】
手首装置6は、アーム7の先端に取り付けられていて、第1の軸ユニット1と、第1軸ユニットにつながった第2の軸ユニット2と、第2軸ユニットにつながった第3の軸ユニット3とを有する。手首装置2にはさらに、第2軸ユニット2と並列に設置した第4の軸ユニット4と、第4軸ユニットにつながった第5の軸ユニットとを設けている。
これら第1〜第5の軸ユニットはそれぞれ、減速機構を一体に組み込んだ減速機一体型モータ1a,2a,3a,4a,5aを備え、これらモータをブラケット2b,3b,5bを用いて連結している。
【0008】
第1軸ユニットのモータ1aは、その固定側部分をアーム7の先端にボルト付けされている。ブラケット2bは断面がコ字形状であり、コ字の縦棒となる中央部分をモータ1aの減速機構出力軸にボルト付けしている。ブラケット2bの、コ字の上横棒となる一端部には、第2軸ユニットのモータ2aの固定側部分がボルト付けされている。さらに、このモータ2aの減速機構出力軸に、L字形状のブラケット3bの一端部をボルト付けし、ブラケット3bの他端部には、第3軸ユニットのモータ3aの固定側部分をボルト付けしている。
かくして、第1〜第3軸ユニットは、順次に互いに直交するように配置され、全体として、図1に示すようなオフセット手首を構成する。
【0009】
一方、第2軸ユニットのブラケット2bの、コ字の下横棒となる他端部にも、第4軸ユニットのモータ4aの固定側部分がボルト付けされている。さらに、このモータ4aの減速機構出力軸に、L字形状のブラケット5bの一端部をボルト付けし、ブラケット5bの他端部には、第5軸ユニットのモータ5aの固定側部分をボルト付けしている。
かくして、第1、第4および第5軸ユニットも、順次に互いに直交するように配置され、全体として、図1に見られるような第2のオフセット手首を構成している。
第3と第5軸ユニットの先端、すなわちモータ3aと5aの減速機構出力軸に、2つのエンドエフェクタをそれぞれ取り付けることができる。
【0010】
図2に示す実施態様も、本発明を手首装置8に適用している。手首装置8は、図1の例と同様な第1軸ユニット1、第2軸ユニット2、第4軸ユニット4、そして第5軸ユニット5を備えており、アーム7に回動可能に取り付けている点も図1の例と同じである。
図2の手首装置8は、第3の軸ユニット9の取付方向が図1の例とは違っている。第3軸ユニットの減速機一体型モータ9aは、このモータを第2軸ユニットのモータにつなぐL字形状のブラケット9bの向きが、図1の例とは逆で、内向きである。
このように、この実施形態は、第1〜第3軸ユニットがインライン手首を、第1軸ユニット、第4軸ユニット、第5軸ユニットがオフセット手首を成している。
【0011】
図3は、ロボットの垂直型アームを本発明に従って構成した例を示している。
図3のアーム60は、第1の軸ユニット10に旋回自在に支えられた2つのアーム部分をもつ形状を呈する。この例でも、各軸ユニットは駆動系となる減速機一体型モータと、これを支承するブラケットとから成るモジュール構成である。
旋回用の軸ユニット10はモータ10aを有し、該モータに、アーム全体の据え付け用の円筒状ベース70をボルト付けしている。
【0012】
この旋回モータ10aの減速機構出力軸に、図1と2の例と同様な、コ字形状のブラケット20bを固定している。このブラケットの両端部に、2つの減速機一体型モータ20a,20bが軸線を揃えて対向して取り付けられ、第2の軸ユニット20と、第4の軸ユニット40を成している。さらに、第2軸ユニットに、平板状のブラケット30bを介して、第3の軸ユニット30の減速機一体型モータ30aをつないで、一方のアーム部分を構成している。
他方のアーム部分も同様に、第4軸ユニット40に、平板形状のブラケット50bを用いて第5の軸ユニット50のモータ50aをつないで形成している。
【0013】
続いて、本発明のロボットに使用する減速機一体型モータの一例を、図5を参照して説明する。
図5に示す例は、モータ部101と、ハーモニックドライブ減速機構102と、鍔付き円筒状のケース109とを有する。
モータ部101は、従来のACモータと同様の構成であり、モータ部と同軸状の減速機構102と共に、モータの静止ないし固定側部分となるケース109内に配設している。
【0014】
減速機構102は、モータ部101の出力軸に連結したウェーブジェネレータ104と、それに隣接して軸受103で回転可能に支承した出力軸108と、ケース109の内周壁に形成したサーキュラスプライン105から成る。出力軸108は、ウェーブジェネレータ104とサーキュラスプライン105の間に入るフレクスプライン106を有し、これらの噛み合いを介して、モータ部101により駆動される。
【0015】
主軸受103はクロスローラ軸受であり、ラジアル荷重とスラスト荷重とモーメント荷重を同時に支持することができる。減速機一体型モータは、オイルシ−ル107などによって内部が密封され、防滴構造である。
なお、減速機一体型モータは、上述のハーモニックドライブ減速機のかわりに、例えば、RV減速機、サイクロ減速機、遊星歯車減速機など、その他の減速手段を用いても良い。主軸受は、クロスローラ軸受のかわりに、アンギュラ玉軸受、テーパコロ軸受など、その他の軸受を用いることができる。
【0016】
以上、本発明の実施態様を説明したが、本発明はこれら特定の形のみに限定されるものでなく、説明した形態を様々に変更し、或いは本発明を他の形態で実施することも可能である。
例えば、図1の手首装置を図3のアームと組み合わせてもよく、また、各モータにおける固定側部分と減速機機構出力軸との取付関係は、図示例とは逆であっても、同様な機能を得られる。
【0017】
【発明の効果】
本発明によると、簡単な構造で、アームや手首装置に複数の軸系統を自由に容易に設けることが出来る。よって、小型で汎用性に優れたアームと手首装置、ひいてはこれらを用いる産業用ロボットの安価な提供を可能にする効果がある。
【図面の簡単な説明】
【図1】本発明の実施態様である、2つのオフセット手首を呈する手首装置を備えたロボットの部分断面概略図である。
【図2】本発明の別の実施態様である、インラインとオフセットの2つの手首を成す手首装置を備えたロボットの部分断面概略図である。
【図3】本発明の別の実施態様である、2つのアーム部分をもつロボットアームの部分断面概略図である。
【図4】本発明のロボットに使用する減速機一体型モータの一例を示す部分断面図である。
【符号の説明】
1−5、9、10−50 軸ユニット
1a−5a、9a、10a−50a 減速機一体型モータ
2b、3b、5b、9b、20b、30b、50b ブラケット
6,8 手首装置
7 アーム
60 アーム
102 減速機構
108 出力軸
【発明の属する技術分野】
本発明は、産業用ロボットの手首とアームの構造に関する。
【0002】
【従来の技術】
従来、産業用ロボットの手首装置として、2つの工具を搭載可能な構造がある(例えば、特許文献1参照)。この手首装置は、2つの手首先端を設け、駆動シャフトを4重に同軸上に配置して各手首先端の減速機を駆動している。このような構造は、駆動系に多数の複雑な部品を必要とし、また、軸構成に合わせて駆動系の部品形状が決まるため、軸構成を簡単に変更することができない。
【特許文献1】特開2002−36163号公報
【0003】
【発明が解決しようとする課題】
本発明は、手首装置やアームにおいて、複雑な構造を伴うことなく、軸を自由に構成し得る産業用ロボットの提供を目的とする。
【0004】
【課題を解決するための手段】
本発明による、アームと手首装置を有する産業用ロボットは、これらアームおよび手首装置の少なくとも1つの軸ユニットの駆動装置を、減速機構を一体に組み込んだ減速機一体モータで構成し、このモータで1つのブラケットを駆動し、このブラケットを、2つの減速機一体型モータを搭載可能に形成することを特徴とする。
この構成では、軸ユニットの駆動系は減速機一体型モータの独立したモジュールであり、別途に駆動機構の設置を要さず、軸ユニットの構造が簡単である。また、この駆動系が動かすブラケットには2つの別の駆動系を搭載して、多彩な軸構成を簡単に実現し得るので、ロボットアームならびに手首を自由に構成することができる。
【0005】
上述のモータは防滴構造であることが好ましい。こうすることによって、ロボットアームおよび手首には、防滴手段を別途設ける必要がなく、構造がさらに簡単になる。
【0006】
【発明の実施の形態】
本発明の実施の形態を、図1〜図4を参照して説明する。なお、これら図面においては、同様な構成部分に同じ参照符号を付して説明を省略する。
図1は本発明による産業用ロボットの要部を示し、この例では、手首装置6を本発明に従って構成して、2つのエンドエフェクタを搭載可能にしている。
【0007】
手首装置6は、アーム7の先端に取り付けられていて、第1の軸ユニット1と、第1軸ユニットにつながった第2の軸ユニット2と、第2軸ユニットにつながった第3の軸ユニット3とを有する。手首装置2にはさらに、第2軸ユニット2と並列に設置した第4の軸ユニット4と、第4軸ユニットにつながった第5の軸ユニットとを設けている。
これら第1〜第5の軸ユニットはそれぞれ、減速機構を一体に組み込んだ減速機一体型モータ1a,2a,3a,4a,5aを備え、これらモータをブラケット2b,3b,5bを用いて連結している。
【0008】
第1軸ユニットのモータ1aは、その固定側部分をアーム7の先端にボルト付けされている。ブラケット2bは断面がコ字形状であり、コ字の縦棒となる中央部分をモータ1aの減速機構出力軸にボルト付けしている。ブラケット2bの、コ字の上横棒となる一端部には、第2軸ユニットのモータ2aの固定側部分がボルト付けされている。さらに、このモータ2aの減速機構出力軸に、L字形状のブラケット3bの一端部をボルト付けし、ブラケット3bの他端部には、第3軸ユニットのモータ3aの固定側部分をボルト付けしている。
かくして、第1〜第3軸ユニットは、順次に互いに直交するように配置され、全体として、図1に示すようなオフセット手首を構成する。
【0009】
一方、第2軸ユニットのブラケット2bの、コ字の下横棒となる他端部にも、第4軸ユニットのモータ4aの固定側部分がボルト付けされている。さらに、このモータ4aの減速機構出力軸に、L字形状のブラケット5bの一端部をボルト付けし、ブラケット5bの他端部には、第5軸ユニットのモータ5aの固定側部分をボルト付けしている。
かくして、第1、第4および第5軸ユニットも、順次に互いに直交するように配置され、全体として、図1に見られるような第2のオフセット手首を構成している。
第3と第5軸ユニットの先端、すなわちモータ3aと5aの減速機構出力軸に、2つのエンドエフェクタをそれぞれ取り付けることができる。
【0010】
図2に示す実施態様も、本発明を手首装置8に適用している。手首装置8は、図1の例と同様な第1軸ユニット1、第2軸ユニット2、第4軸ユニット4、そして第5軸ユニット5を備えており、アーム7に回動可能に取り付けている点も図1の例と同じである。
図2の手首装置8は、第3の軸ユニット9の取付方向が図1の例とは違っている。第3軸ユニットの減速機一体型モータ9aは、このモータを第2軸ユニットのモータにつなぐL字形状のブラケット9bの向きが、図1の例とは逆で、内向きである。
このように、この実施形態は、第1〜第3軸ユニットがインライン手首を、第1軸ユニット、第4軸ユニット、第5軸ユニットがオフセット手首を成している。
【0011】
図3は、ロボットの垂直型アームを本発明に従って構成した例を示している。
図3のアーム60は、第1の軸ユニット10に旋回自在に支えられた2つのアーム部分をもつ形状を呈する。この例でも、各軸ユニットは駆動系となる減速機一体型モータと、これを支承するブラケットとから成るモジュール構成である。
旋回用の軸ユニット10はモータ10aを有し、該モータに、アーム全体の据え付け用の円筒状ベース70をボルト付けしている。
【0012】
この旋回モータ10aの減速機構出力軸に、図1と2の例と同様な、コ字形状のブラケット20bを固定している。このブラケットの両端部に、2つの減速機一体型モータ20a,20bが軸線を揃えて対向して取り付けられ、第2の軸ユニット20と、第4の軸ユニット40を成している。さらに、第2軸ユニットに、平板状のブラケット30bを介して、第3の軸ユニット30の減速機一体型モータ30aをつないで、一方のアーム部分を構成している。
他方のアーム部分も同様に、第4軸ユニット40に、平板形状のブラケット50bを用いて第5の軸ユニット50のモータ50aをつないで形成している。
【0013】
続いて、本発明のロボットに使用する減速機一体型モータの一例を、図5を参照して説明する。
図5に示す例は、モータ部101と、ハーモニックドライブ減速機構102と、鍔付き円筒状のケース109とを有する。
モータ部101は、従来のACモータと同様の構成であり、モータ部と同軸状の減速機構102と共に、モータの静止ないし固定側部分となるケース109内に配設している。
【0014】
減速機構102は、モータ部101の出力軸に連結したウェーブジェネレータ104と、それに隣接して軸受103で回転可能に支承した出力軸108と、ケース109の内周壁に形成したサーキュラスプライン105から成る。出力軸108は、ウェーブジェネレータ104とサーキュラスプライン105の間に入るフレクスプライン106を有し、これらの噛み合いを介して、モータ部101により駆動される。
【0015】
主軸受103はクロスローラ軸受であり、ラジアル荷重とスラスト荷重とモーメント荷重を同時に支持することができる。減速機一体型モータは、オイルシ−ル107などによって内部が密封され、防滴構造である。
なお、減速機一体型モータは、上述のハーモニックドライブ減速機のかわりに、例えば、RV減速機、サイクロ減速機、遊星歯車減速機など、その他の減速手段を用いても良い。主軸受は、クロスローラ軸受のかわりに、アンギュラ玉軸受、テーパコロ軸受など、その他の軸受を用いることができる。
【0016】
以上、本発明の実施態様を説明したが、本発明はこれら特定の形のみに限定されるものでなく、説明した形態を様々に変更し、或いは本発明を他の形態で実施することも可能である。
例えば、図1の手首装置を図3のアームと組み合わせてもよく、また、各モータにおける固定側部分と減速機機構出力軸との取付関係は、図示例とは逆であっても、同様な機能を得られる。
【0017】
【発明の効果】
本発明によると、簡単な構造で、アームや手首装置に複数の軸系統を自由に容易に設けることが出来る。よって、小型で汎用性に優れたアームと手首装置、ひいてはこれらを用いる産業用ロボットの安価な提供を可能にする効果がある。
【図面の簡単な説明】
【図1】本発明の実施態様である、2つのオフセット手首を呈する手首装置を備えたロボットの部分断面概略図である。
【図2】本発明の別の実施態様である、インラインとオフセットの2つの手首を成す手首装置を備えたロボットの部分断面概略図である。
【図3】本発明の別の実施態様である、2つのアーム部分をもつロボットアームの部分断面概略図である。
【図4】本発明のロボットに使用する減速機一体型モータの一例を示す部分断面図である。
【符号の説明】
1−5、9、10−50 軸ユニット
1a−5a、9a、10a−50a 減速機一体型モータ
2b、3b、5b、9b、20b、30b、50b ブラケット
6,8 手首装置
7 アーム
60 アーム
102 減速機構
108 出力軸
Claims (2)
- アームと手首装置を有する産業用ロボットにおいて、これらアームおよび手首装置の少なくとも1つの軸ユニットの駆動装置を、減速機構を一体に組み込んだ減速機一体モータで構成し、このモータで1つのブラケットを駆動し、このブラケットを、2つの減速機一体型モータを搭載可能に形成することを特徴とする、産業用ロボット。
- 請求項1記載のロボットにおいて、前記モータは防滴構造である、産業用ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003177905A JP2005014105A (ja) | 2003-06-23 | 2003-06-23 | 産業用ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003177905A JP2005014105A (ja) | 2003-06-23 | 2003-06-23 | 産業用ロボット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005014105A true JP2005014105A (ja) | 2005-01-20 |
Family
ID=34179690
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003177905A Pending JP2005014105A (ja) | 2003-06-23 | 2003-06-23 | 産業用ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005014105A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017138634A1 (ja) * | 2016-02-10 | 2017-08-17 | 株式会社国際電気通信基礎技術研究所 | 外部駆動型の関節構造体 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS582800B2 (ja) * | 1979-02-28 | 1983-01-18 | 株式会社明電舎 | マニピユレ−タ等における作動力検出装置 |
| JPH0355182U (ja) * | 1989-10-02 | 1991-05-28 | ||
| JPH0475891A (ja) * | 1990-07-13 | 1992-03-10 | Yaskawa Electric Corp | 産業用ロボットの手首機構 |
| JPH0557659A (ja) * | 1991-09-02 | 1993-03-09 | Matsushita Electric Ind Co Ltd | 産業用ロボツトのアーム連結装置 |
| JPH06315879A (ja) * | 1993-02-24 | 1994-11-15 | Fanuc Robotics North America Inc | 電動回転継手およびそれを使用したモジュラーロボットの構成方法 |
| JPH0929671A (ja) * | 1995-07-20 | 1997-02-04 | Nec Corp | ロボット関節 |
| JPH11277467A (ja) * | 1998-03-25 | 1999-10-12 | Mecs Corp | 薄型基板搬送ロボット |
| JP2001277176A (ja) * | 2000-03-30 | 2001-10-09 | Shibaura Mechatronics Corp | 旋回装置 |
-
2003
- 2003-06-23 JP JP2003177905A patent/JP2005014105A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS582800B2 (ja) * | 1979-02-28 | 1983-01-18 | 株式会社明電舎 | マニピユレ−タ等における作動力検出装置 |
| JPH0355182U (ja) * | 1989-10-02 | 1991-05-28 | ||
| JPH0475891A (ja) * | 1990-07-13 | 1992-03-10 | Yaskawa Electric Corp | 産業用ロボットの手首機構 |
| JPH0557659A (ja) * | 1991-09-02 | 1993-03-09 | Matsushita Electric Ind Co Ltd | 産業用ロボツトのアーム連結装置 |
| JPH06315879A (ja) * | 1993-02-24 | 1994-11-15 | Fanuc Robotics North America Inc | 電動回転継手およびそれを使用したモジュラーロボットの構成方法 |
| JPH0929671A (ja) * | 1995-07-20 | 1997-02-04 | Nec Corp | ロボット関節 |
| JPH11277467A (ja) * | 1998-03-25 | 1999-10-12 | Mecs Corp | 薄型基板搬送ロボット |
| JP2001277176A (ja) * | 2000-03-30 | 2001-10-09 | Shibaura Mechatronics Corp | 旋回装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017138634A1 (ja) * | 2016-02-10 | 2017-08-17 | 株式会社国際電気通信基礎技術研究所 | 外部駆動型の関節構造体 |
| JP6220105B1 (ja) * | 2016-02-10 | 2017-10-25 | 株式会社国際電気通信基礎技術研究所 | 外部駆動型の関節構造体 |
| JP2018020437A (ja) * | 2016-02-10 | 2018-02-08 | 株式会社国際電気通信基礎技術研究所 | 外部駆動型の関節構造体 |
| US11325244B2 (en) | 2016-02-10 | 2022-05-10 | Advanced Telecommunications Research Institute International | Externally-driven joint structure |
| US11794336B2 (en) | 2016-02-10 | 2023-10-24 | Advanced Telecommunications Research Institute International | Externally-driven joint structure |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5327312B2 (ja) | ロボットの関節ユニット及びロボット | |
| EP2172671B1 (en) | Gear device and rotation section structure adapted for industrial robot and using the gear device | |
| KR0178812B1 (ko) | 조합된 가속기어유닛을 구비한 산업용 로보트 | |
| EP1163984A1 (en) | Joint structure for a robot comprising a speed reducer | |
| JP5270449B2 (ja) | ロボットの関節構造、及びそれを備えるロボット | |
| WO2004065074A1 (ja) | 産業用ロボットの減速装置 | |
| JPH0583353B2 (ja) | ||
| JPH09272094A (ja) | 産業用ロボットの手首機構 | |
| JP2007044839A (ja) | 産業用ロボット | |
| WO2018099392A1 (zh) | 少齿差行星减速器、车载显示屏装置及车辆 | |
| KR960700129A (ko) | 산업용 로보트의 관절부 구동구조 | |
| JPS597593A (ja) | ロボツトの関節装置 | |
| JP2001121981A (ja) | 車両の動力伝達装置 | |
| JPH04152090A (ja) | 産業用ロボット装置 | |
| JP2000343477A (ja) | ロボットの関節部構造 | |
| TW201124242A (en) | Robot | |
| KR20080090303A (ko) | 베벨기어를 이용한 동심 2축 기구 | |
| JP2827166B2 (ja) | 遊星歯車減速機 | |
| JP2005014105A (ja) | 産業用ロボット | |
| JP2588386B2 (ja) | 制御装置に使用される遊星歯車減速機の出力軸支持装置 | |
| JP4236999B2 (ja) | 産業用ロボット | |
| JP2005014104A (ja) | 産業用ロボットのエンドエフェクタ | |
| JP2006007355A (ja) | ロボットの手首装置 | |
| JP2714540B2 (ja) | 工業用ロボットの手首機構 | |
| JP2005014102A (ja) | 産業用ロボットの手首装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080304 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080801 |