JP2005347310A - 電子部品実装装置 - Google Patents
電子部品実装装置 Download PDFInfo
- Publication number
- JP2005347310A JP2005347310A JP2004161731A JP2004161731A JP2005347310A JP 2005347310 A JP2005347310 A JP 2005347310A JP 2004161731 A JP2004161731 A JP 2004161731A JP 2004161731 A JP2004161731 A JP 2004161731A JP 2005347310 A JP2005347310 A JP 2005347310A
- Authority
- JP
- Japan
- Prior art keywords
- stator
- tension
- axis
- linear motor
- stress
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Supply And Installment Of Electrical Components (AREA)
- Linear Motors (AREA)
Abstract
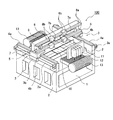
【解決手段】 電子部品を移載する移載ヘッド12と、移載ヘッド12を保持してX軸方向へ移動させるX軸リニアモータ7と、X軸リニアモータ7を支持しX軸方向へ延びるX軸ビーム部材6と、X軸ビーム部材6ごと移載ヘッド12をX軸リニアモータ7の移動方向と垂直なY軸方向へ移動させるY軸リニアモータ3と、を備えた電子部品実装装置1において、X軸リニアモータ7は、X軸方向へ延びX軸ビーム部材6に両端が支持されるシャフト状の固定子7aと、移載ヘッド12に設けられ固定子7aを包囲し固定子7aに沿って移動する可動子7bと、を有し、固定子7aに張力を付与する張力付与手段を具備した。
【選択図】図2
Description
ここで、固定子には張力付与手段により張力が付与され、固定子の固有振動数が増大している。すなわち、シャフト状の固定子は固有振動数が高いので振動時の変形量が小さくなっており、この結果、動的な剛性が向上している。これにより、ビーム移動装置の駆動時には、長尺な固定子に軸方向と垂直な方向の加速度が作用することとなるが、固定子の動的な剛性が向上していることから振動を抑制することができるし、振動しても変形量が小さなものとなる。
また、例えば経年劣化により固定子に付与される張力が所期の値から変化した場合にも、固定子に加わる応力が変化する。従って、経年劣化により応力変化に対応して、的確に固定子に張力を付与することもできる。
また、例えば、経年劣化により固定子に付与される張力が所期の値から変化した場合や、張力付与手段が正常に動作しない場合にも、固定子に加わる応力が変化する。従って、作業者は、経年劣化に対応して固定子に付与される張力を付与したり、装置の故障等を認識したりすることができる。
これにより、リニアモータ自体の整定性が向上するし、リニアモータの固定子と可動子が干渉しないビーム移動装置の駆動によるビーム部材の加速度の上限が高くなり、ひいてはビーム移動装置の整定性も向上する。従って、電子部品を搬送する際の移載ヘッドの移動時間が短縮され、且つ、移動後の整定時間も短縮されるとともに、移載ヘッドの停止精度が向上する。すなわち、電子基板に対する電子部品の搭載タクト及び搭載精度を向上させることができる。
また、曲げ方向の負荷が加わらないときにまで固定子に張力が付与されることはなく、固定子に加わる負荷を最小限に抑えることができ、固定子における永久歪みの発生を抑制することができる。
作業者は、固定子の応力に基づく情報を把握し、固定子に加わる応力が変化する場合にも、これに対応して固定子に付与される張力を調整することができる。
図3に示されるように、固定子7aは、永久磁石15・・・の同極同士が対向するように複数配置され、その周囲を非磁性体であるヨークで覆ったシャフトである。
また、可動子7bは、全体としてシャフト状の固定子7aの周囲を3相のコイルCが周回するように配置されているスライダである。
つまり、このX軸リニアモータ7は、シャフトモータと称される駆動モータである。
可動子7bには、コイルを固定子7aに巻き付ける方向に3相のコイルCが、シャフトの軸方向に1組から4組程度並べられている。各コイルの長さ(シャフトの軸方向の長さ)はシャフトの磁石のピッチと同じ、つまり60mmから120mmとする。そして、一つのコイルはN極、S極のどちらかから発生する磁束を横切ることになる。これに電流を流すと同期モータとして動作するシャフトモータとなる。このX軸リニアモータ7が動作することにより、可動子7bが固定子7aに沿ってX軸方向に摺動するように移動し、この結果、移載ヘッド12がX軸方向へ移動する。
まず、搬送路9を通じて電子基板10を装置外から搬入し、所定の搭載位置にて固定する。続いて、X軸リニアモータ7及びY軸リニアモータ3の駆動により、移載ヘッド12をパーツフィーダ13の上方まで移動し、予め記憶されている生産データに基づいて、各吸着ノズルにより電子部品を順次に吸着して保持する。
また、パイプ14を、引っ張り方向の負荷に比較的強く且つ比較的軽量なカーボンコンポジット材により構成したので、パイプ14の強度を維持しつつ装置の軽量化を図ることができる。
斯かる構成とすることにより、X軸ビーム部材6には、固定子7aからの曲げ方向の力と、補正ロッド29からの曲げ方向の力とが加わることとなる。ここで、補正ロッド29は固定子7aと軸中心について反対側に配されていることから、X軸ビーム部材6において固定子7aからの曲げ方向の力と、補正ロッド29から加わる曲げ方向の力とが相殺される。従って、X軸ビーム部材6の内部応力を低減して曲げ変形を抑制し、X軸ビーム部材6の剛性、強度、信頼耐久性を向上することができる。
また、例えば経年劣化により固定子7aに付与される張力が所期の値から変化した場合にも、固定子7aに加わる応力が変化する。従って、経年劣化により応力変化に対応して、的確に固定子7aに張力を付与することもできる。
また、Y軸リニアモータ3の駆動によりX軸ビーム部材6に生じる加速度に応じて、固定子7aの張力を変動させるようにすると好ましい。この場合は、X軸ビーム部材6に生じる加速度に応じて固定子7aに張力が付与されるので、固定子7aに要求される剛性に対応したきめ細やかな張力付与制御が実現される。
また、例えば、経年劣化により固定子7aに付与される張力が所期の値から変化した場合や、張力付与手段が正常に動作しない場合にも、固定子7aに加わる応力が変化する。従って、作業者は、経年劣化に対応して固定子7aに付与される張力を付与したり、装置の故障等を認識したりすることができる。
6 X軸ビーム部材
7 X軸リニアモータ
7a 固定子
7b 可動子
12 移載ヘッド
23 モータプルアングル
24 プルナット
27 プルボルト
28 調整ねじ
29 補正ロッド
30 電歪素子
31 圧電素子
40 張力制御部
100 電子部品実装装置
Claims (6)
- 電子部品を移載する移載ヘッドと、
前記移載ヘッドを保持して所定の軸方向へ移動させるリニアモータと、
前記リニアモータを支持し前記軸方向へ延びるビーム部材と、
前記ビーム部材ごと前記移載ヘッドを前記リニアモータの移動方向と垂直な軸方向へ移動させるビーム移動装置と、を備えた電子部品実装装置において、
前記リニアモータは、
前記軸方向へ延び前記ビーム部材に両端が支持されるシャフト状の固定子と、
前記移載ヘッドに設けられ、前記固定子を包囲し前記固定子に沿って移動する可動子と、を有し、
前記固定子に張力を付与する張力付与手段を具備したことを特徴とする電子部品実装装置。 - 前記張力付与手段は、前記ビーム移動装置の駆動により前記ビーム部材に加速度が生じるときに、前記固定子に張力を付与することを特徴とする請求項1に記載の電子部品実装装置。
- 前記張力付与手段は、前記ビーム移動装置の駆動により前記ビーム部材に生じる加速度に応じて、前記固定子の張力を変動させることを特徴とする請求項1または2に記載の電子部品実装装置。
- 前記固定子の応力を検出する応力検出手段を備え、
前記張力付与手段は、前記応力検出手段により検出された応力に対応して、前記固定子に張力を付与することを特徴とする請求項1から3のいずれか一項に記載の電子部品実装装置。 - 前記固定子の応力を検出する応力検出手段と、
前記応力検出手段により検出された応力に基づく情報を表示する応力情報表示手段と、を備えたことを特徴とする請求項1から3のいずれか一項に記載の電子部品実装装置。 - 前記ビーム部材における前記固定子と軸中心反対側に両端が支持される補正ロッドと、
前記張力付与手段により前記固定子に付与される張力に応じて、前記補正ロッドに張力を付与する張力補正手段を備えたことを特徴とする請求項1から5のいずれか一項に記載の電子部品実装装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004161731A JP4413083B2 (ja) | 2004-05-31 | 2004-05-31 | 電子部品実装装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004161731A JP4413083B2 (ja) | 2004-05-31 | 2004-05-31 | 電子部品実装装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005347310A true JP2005347310A (ja) | 2005-12-15 |
| JP4413083B2 JP4413083B2 (ja) | 2010-02-10 |
Family
ID=35499441
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004161731A Expired - Fee Related JP4413083B2 (ja) | 2004-05-31 | 2004-05-31 | 電子部品実装装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4413083B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007185054A (ja) * | 2006-01-10 | 2007-07-19 | Iai:Kk | アクチュエータ |
| JP2007195339A (ja) * | 2006-01-19 | 2007-08-02 | Fuji Mach Mfg Co Ltd | 円筒型リニアモータ |
| JP2009027903A (ja) * | 2007-07-18 | 2009-02-05 | Fuji Mach Mfg Co Ltd | リニアモータ |
| JP2009296762A (ja) * | 2008-06-04 | 2009-12-17 | Hitachi High-Tech Instruments Co Ltd | 駆動ステージ及びそれを用いたチップマウンタ |
| JP2010172071A (ja) * | 2009-01-20 | 2010-08-05 | Fuji Mach Mfg Co Ltd | 直線駆動装置および電子回路部品装着機 |
| JP4803252B2 (ja) * | 2006-07-26 | 2011-10-26 | 株式会社安川電機 | 円筒形リニアモータおよび搬送装置 |
| KR20160044319A (ko) * | 2014-10-15 | 2016-04-25 | 한화테크윈 주식회사 | 겐트리 모듈 |
| CN111782444A (zh) * | 2020-06-09 | 2020-10-16 | 北京小米移动软件有限公司 | 一种马达测试系统及方法、计算机存储介质 |
-
2004
- 2004-05-31 JP JP2004161731A patent/JP4413083B2/ja not_active Expired - Fee Related
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007185054A (ja) * | 2006-01-10 | 2007-07-19 | Iai:Kk | アクチュエータ |
| JP2007195339A (ja) * | 2006-01-19 | 2007-08-02 | Fuji Mach Mfg Co Ltd | 円筒型リニアモータ |
| JP4803252B2 (ja) * | 2006-07-26 | 2011-10-26 | 株式会社安川電機 | 円筒形リニアモータおよび搬送装置 |
| JP2009027903A (ja) * | 2007-07-18 | 2009-02-05 | Fuji Mach Mfg Co Ltd | リニアモータ |
| JP2009296762A (ja) * | 2008-06-04 | 2009-12-17 | Hitachi High-Tech Instruments Co Ltd | 駆動ステージ及びそれを用いたチップマウンタ |
| JP2010172071A (ja) * | 2009-01-20 | 2010-08-05 | Fuji Mach Mfg Co Ltd | 直線駆動装置および電子回路部品装着機 |
| KR20160044319A (ko) * | 2014-10-15 | 2016-04-25 | 한화테크윈 주식회사 | 겐트리 모듈 |
| KR102041340B1 (ko) * | 2014-10-15 | 2019-11-27 | 한화정밀기계 주식회사 | 겐트리 모듈 |
| CN111782444A (zh) * | 2020-06-09 | 2020-10-16 | 北京小米移动软件有限公司 | 一种马达测试系统及方法、计算机存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4413083B2 (ja) | 2010-02-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101483478B1 (ko) | 리니어 모터, 부품 실장 장치 및 부품 검사 장치 | |
| US9335312B2 (en) | Method for assembling gas sensor, and gas sensor assembly apparatus | |
| JP5443467B2 (ja) | 位置決めシステム | |
| JP4413083B2 (ja) | 電子部品実装装置 | |
| US9634546B2 (en) | Multi-shaft linear motor and component transfer apparatus | |
| TWI543282B (zh) | Drive mechanism and manufacturing device | |
| WO2009130953A1 (ja) | 動電型振動試験装置 | |
| KR20100098605A (ko) | 리니어 모터 및 부품 이송 장치 | |
| JP2009295709A (ja) | マーク認識システム、マーク認識方法および表面実装機 | |
| EP2804458B1 (en) | Component mounting device | |
| US11134596B2 (en) | Work machine | |
| US9949419B2 (en) | Linear motion device and electronic component mounting apparatus | |
| CN104081636A (zh) | 线性马达以及组件安装装置 | |
| US20200124394A1 (en) | Coordinate measuring machine | |
| JP4516663B2 (ja) | 直動装置、xy移動装置及び電子部品装着装置 | |
| JP2005252073A (ja) | 電子部品実装装置 | |
| JP2006005155A (ja) | 電子部品実装装置 | |
| JP5289775B2 (ja) | 部品認識装置、部品実装装置及び部品試験装置 | |
| JP5352089B2 (ja) | リニアモータ及び部品移載装置 | |
| WO2023162030A1 (ja) | スライド部材およびスライド部材の製造方法並びに部品実装機 | |
| JP2006281426A (ja) | 位置決め装置 | |
| WO2023095238A1 (ja) | リニアモータ固定子およびその組付方法並びに部品実装機、基板製造方法 | |
| JP2006341350A (ja) | エアスライドおよびその組立方法 | |
| JP2021019140A (ja) | 基板作業装置およびその製造方法 | |
| JP2004186399A (ja) | 部品保持装置及び部品搭載装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070530 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090813 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090818 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090929 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091020 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091117 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121127 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4413083 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121127 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131127 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |