JP2006247802A - 移動ロボット - Google Patents
移動ロボット Download PDFInfo
- Publication number
- JP2006247802A JP2006247802A JP2005070259A JP2005070259A JP2006247802A JP 2006247802 A JP2006247802 A JP 2006247802A JP 2005070259 A JP2005070259 A JP 2005070259A JP 2005070259 A JP2005070259 A JP 2005070259A JP 2006247802 A JP2006247802 A JP 2006247802A
- Authority
- JP
- Japan
- Prior art keywords
- mobile robot
- wheel
- support leg
- control
- main drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D57/00—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track
- B62D57/02—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members
- B62D57/028—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members having wheels and mechanical legs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D57/00—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track
- B62D57/02—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members
- B62D57/024—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members specially adapted for moving on inclined or vertical surfaces
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
フットプリントが狭く、平地での機敏な走行性能を持ち、かつ転倒防止機能を持ち、かつ段差などの歩行環境に対応した走行が可能な人間共生作業に好適な移動ロボットを構成する。
【解決手段】
倒立振子制御により制御される主駆動輪2,3の前方及び後方にその先端を昇降可能な支持脚4及び5を配置して、倒立二輪走行時には、走行面に対し支持脚4及び5の先端を所定の間隔をとって位置決めし、転倒が検出された場合、支持脚4及び5の位置を固定するか、転倒方向の支持脚を繰り出すことで、転倒を防止する。さらに、支持脚4,5の先端に設けた床面距離センサ4e、5e及び側面距離センサ4f、4g、5f、5gの検出情報に基づき段差や傾斜面の存在を感知して、段差や傾斜面に対し支持脚を回避させ、着地させたもう一方の支持脚と主駆動輪2,3により重心位置を安定に保持して、段差及び傾斜面を踏破する。
【選択図】図1
Description
本発明の目的は、走行時の転倒防止が可能で、かつ段差、斜面が存在する走行環境での安定な走行が可能で、フットプリントが狭く人間共生作業に好適な移動ロボットを提供することにある。
(2)本発明の目的は、(1)の構成において、前記副車輪を走行面に対して昇降可能な支持脚を前記移動機構の主駆動輪の推進方向の前方及び後方に配することにより達成される。
(3)本発明の目的は、(2)の構成において、前記副車輪を従動型車輪とすることにより達成される。
(4)本発明の目的は、(2)の構成において、前記副車輪を駆動型車輪とすることにより達成される。
(5)本発明の目的は、(4)の構成において、前記副車輪に操舵旋回駆動機構を備えたすることにより達成される。
(6)本発明の目的は、(1)の構成において、前記移動機構に対し、前記副車輪を推進方向に揺動可能な回転機構と、前記回転機構の回転中心から副車輪までの距離を制御可能な繰り出し機構とから支持脚を構成することにより達成される。
(7)本発明の目的は、(6)の構成において、前記副車輪を駆動型車輪として構成し、前記主駆動輪と同様に倒立振子制御により前方推進方向の推力を制御する手段を供えることにより達成される。
(8)本発明の目的は、(7)の構成において、前記副車輪に操舵旋回駆動機構を備えことにより達成される。
(9)本発明の目的は、(1)の構成において、前記支持脚の先端と走行面との間の相互距離を計測する手段を備え、所定の相互距離を維持するように前記支持脚を位置決め制御する手段を備えることで達成される。
(10)本発明の目的は、(1)の構成において、前記支持脚の内の少なくとも1つを走行面に接地させ、支持脚の接地点と前記主駆動輪との接地点を結んで形成される領域内に、重心投影位置を維持するように、接地させた支持脚の繰り出し位置を制御する手段を備えることで達成される。
(11)本発明の目的は、(9)の構成において、前記主駆動輪を前記倒立振子制御に基づき駆動している状態で、制御系に異常が生じた場合ないしは、電源が遮断された場合ないしは、移動ロボットの姿勢が許容値以上に傾斜した場合、支持脚の位置を固定することで達成される。
(12)本発明の目的は、(9)の構成において、前記主駆動輪を前記倒立振子制御に基づき駆動している状態で、制御系に異常が生じた場合ないしは、電源が遮断された場合ないしは、移動ロボットの姿勢が許容値以上に傾斜した場合、移動ロボットの転倒方向の支持脚を繰り出して、転倒した姿勢を回復させる制御手段を備えることで達成される。
(13)本発明の目的は、(12)の構成において、前記電源の他に予備の電源を備え、予備の電源により転倒防止のための支持脚の駆動制御を行うことで達成される。
(14)本発明の目的は、(10)の構成において、接地した前記支持脚の繰り出し量と移動ロボットの傾斜姿勢角から、走行面の傾斜角を推定し、走行面の傾斜角が所定の値より小さい場合、走行面が水平面と判定し、前記主駆動輪の前記倒立振子制御を起動することで達成される。
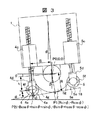
図1は本実施例の移動ロボットの機構構成を説明する正面図及び側面図である。図2は、本実施例の移動ロボットの制御系の構成図である。図1及び図2において、同じ構成要素に対しては同じ構成番号を記してある。
V1r=ΔVr/2+Vrun ………………(2)
V2r=ΔVr/2-Vrun ………………(3)
ここで、V1r、V2rは、走行速度制御装置11に対して出力する主駆動輪2、3の速度指令値。さらに、Vr及びΔVrは、走行統括制御部8から発生される、走行速度目標値及び速度差目標値である。さらに、V1及びV2は、エンコーダ2b、3bにより検出される主駆動輪2、3の走行速度である。さらに、θ及びωは姿勢センサ6により検出される、重力方向に対する推進方向の移動ロボット1の姿勢角度およびその角速度である。K1及びK2は、倒立二輪走行制御のためのフィードバックゲイン関数である。
昇降機構4c、5cに設けられた、昇降モータ4i、5iは、昇降位置制御装置13により制御され、エンコーダ4h、5hにより検出された位置をフィードバック制御に用いて、支持脚4、5を所定の高さに位置決めする。また、昇降機構4c、5cに設けられた、ブレーキ4j、5jは、駆動電源遮断時、もしくは転倒防止制御部14の指令に基づき、支持脚4、5の位置を機械的に固定する。
φ=tan-1(((R-r)sinφ+Bcosθ-hsinθ)/((r-R)cosφ+Bsinθ-hcosθ))…(4)
ここで、Rは主駆動輪2,3の半径、rは副車輪4aの半径、θは移動ロボット1の傾斜角度、hは主駆動輪2,3の中心を基準とした接地状態の支持脚4の副車輪4aの中心の繰り出し距離、Bは主駆動輪2,3の中心と副車輪4aの中心との間の水平方向の軸間距離である。hは、床面距離センサ4eにより検出される。平面検出処理部10により推定された走行面18の傾斜角φが所定の値以下の場合、走行統括制御部8は、倒立走行制御部9に対し、倒立二輪走行の実施を指示で、支持姿勢制御部12に対し、第1の制御機能の実施を指示する。側面距離センサ4f、4g、5f、5gにより、走行面18上に突起物を発見した場合、倒立走行制御部9に対し、まず第3の機能の実施を指示し、倒立二輪走行の解除を実施し、後述する走行環境に応じた走行シーケンスを発生する。システム異常監視部15は、制御装置7を構成する制御ハードの健全性を判断し、姿勢センサ6で検出される移動ロボット1の姿勢角θが許容限界値を越えたか否かを判断し、更に、電源部17の出力が正常化否かを判断する。これらの判断を総合し、移動ロボット1の転倒が予測された場合は、転倒防止制御部14に非常停止指令を与え、転倒防止制御部14は、走行速度制御装置11、非常停止指示を与える。さらに、転倒防止制御部14は、非常停止の要求が、姿勢角θの限界越えに起因する場合は、支持姿勢制御部12に対し、第3の制御機能の実施を指示し、転倒方向にある支持脚4もしくは5を繰り出して、転倒に向けて過度に傾斜した姿勢を回復させる運動を発生する。それ以外の要因による非常停止の要求は、制御システムの問題が生じたとして、支持脚4及び5の繰り出し位置を現在値に維持し、さらに、ブレーキ4j、5jの電源を遮断し、支持脚4、5の位置を機械的に固定し、転倒防止を実施する。非常電源部16は、電源部17より供給される電力を一時保存しており、電源部17の異常により制御装置7全体がダウンした場合、転倒防止制御部14に対、電力を供給し、非常停止処理を完遂させる。
図4は、b)に示す移動ロボット1による倒立二輪走行に対する走行状態の変更の状況を示している。移動ロボット1が停止して休止状態の場合は、a)に示すように、第3及び第4の制御機能を実施し、支持脚4、5を走行面18に接地し機械的に固定状態として、静的に安全な起立姿勢で停止している。c)はb)に示す、姿勢傾斜を伴う倒立二輪走行途中で、姿勢角度が限界値を越えた場合の処理として、支持脚4を繰り出して、進行方向への転倒を防止する様子を示す。d)はb)に示す倒立二輪走行途中に電源部17のトラブルで電源が遮断された場合、ブレーキ4j、5jにより支持脚4、5の電源遮断時の位置を保ち転倒を防止する状況を示す。
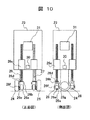
図10は本実施例の移動ロボットの機構構成を説明する正面図及び側面図である。移動ロボット23は、倒立振子制御により制御される主駆動輪24、25と、主駆動輪24、25の前後に配置された支持脚26,27,28,29(但し29は図示されていない)と、重力方向に対する移動ロボット1の姿勢を検出する姿勢センサ30と、姿勢センサ30等の情報に基づき、移動ロボット1の機構を制御する制御装置31とから構成される。
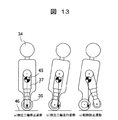
図12は本実施例の移動ロボットの機構構成を説明する正面図及び側面図である。移動ロボット34は、倒立振子制御により制御される主駆動輪35、36と、主駆動輪35、36で挟む形で配置された支持脚37及び多自由度の腕43及び44を備える。支持脚37は、先端に倒立振子制御により制御される副車輪41、42、副車輪41、42を旋回させる旋回機構40、支持脚37を前後に揺動位置決めする支持脚旋回機構38、支持脚37の先端を繰り出し引き込み動作させる伸縮機構39を備える。
4、5、26、27、28、29、37…支持脚、6、30…姿勢センサ、
7、31…制御装置、43、44…腕。
Claims (14)
- 倒立振子制御により前方推進方向の推力を制御する同軸二輪型の移動機構を備えた移動ロボットにおいて、少なくとも一つ以上の副車輪の前記移動機構の主駆動輪に対する相対位置を変更可能な支持脚を備えることを特徴とする移動ロボット。
- 前記副車輪を走行面に対して昇降可能な支持脚を前記移動機構の主駆動輪の推進方向の前方及び後方に配したことを特徴とする請求項1記載の移動ロボット。
- 前記副車輪を従動型車輪としたことを特徴とする請求項2記載の移動ロボット。
- 前記副車輪を駆動型車輪としたことを特徴とする請求項2記載の移動ロボット。
- 前記副車輪に操舵旋回駆動機構を備えたことを特徴とする請求項4記載の移動ロボット。
- 前記移動機構に対し、前記副車輪を推進方向に揺動可能な回転機構と、前記回転機構の回転中心から副車輪までの距離を制御可能な繰り出し機構とから支持脚を構成することを特徴とする請求項1記載の移動ロボット。
- 前記副車輪を駆動型車輪として構成し、前記主駆動輪と同様に倒立振子制御により前方推進方向の推力を制御する手段を供えたことを特徴とする請求項6記載の移動ロボット。
- 前記副車輪に操舵旋回駆動機構を備えたことを特徴とする請求項7記載の移動ロボット。
- 前記支持脚の先端と走行面との間の相互距離を計測する手段を備え、所定の相互距離を維持するように前記支持脚を位置決め制御する手段を備えたことを特徴とする請求項1記載の移動ロボット。
- 前記支持脚の内の少なくとも1つを走行面に接地させ、支持脚の接地点と前記主駆動輪との接地点を結んで形成される領域内に、重心投影位置を維持するように、接地させた支持脚の繰り出し位置を制御する手段を備えたことを特徴とする請求項1記載の移動ロボット。
- 前記主駆動輪を前記倒立振子制御に基づき駆動している状態で、制御系に異常が生じた場合ないしは、電源が遮断された場合ないしは、移動ロボットの姿勢が許容値以上に傾斜した場合、支持脚の位置を固定することを特徴とする請求項9記載の移動ロボット。
- 前記主駆動輪を前記倒立振子制御に基づき駆動している状態で、制御系に異常が生じた場合ないしは、電源が遮断された場合ないしは、移動ロボットの姿勢が許容値以上に傾斜した場合、移動ロボットの転倒方向の支持脚を繰り出して、転倒した姿勢を回復させる制御手段を備えたことを特徴とする請求項9記載の移動ロボット。
- 前記電源の他に予備の電源を備え、予備の電源により転倒防止のための支持脚の駆動制御を行うことを特徴とする請求項12記載の移動ロボット。
- 接地した前記支持脚の繰り出し量と移動ロボットの傾斜姿勢角から、走行面の傾斜角を推定し、走行面の傾斜角が所定の値より小さい場合、走行面が水平面と判定し、前記主駆動輪の前記倒立振子制御を起動することを特徴とする請求項10記載の移動ロボット。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005070259A JP4886201B2 (ja) | 2005-03-14 | 2005-03-14 | 移動ロボット |
| US11/349,920 US7677345B2 (en) | 2005-03-14 | 2006-02-09 | Moving robot |
| EP06002743A EP1703353B1 (en) | 2005-03-14 | 2006-02-10 | Moving robot |
| DE602006000962T DE602006000962T2 (de) | 2005-03-14 | 2006-02-10 | Beweglicher Roboter |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005070259A JP4886201B2 (ja) | 2005-03-14 | 2005-03-14 | 移動ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006247802A true JP2006247802A (ja) | 2006-09-21 |
| JP4886201B2 JP4886201B2 (ja) | 2012-02-29 |
Family
ID=36072129
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005070259A Expired - Fee Related JP4886201B2 (ja) | 2005-03-14 | 2005-03-14 | 移動ロボット |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7677345B2 (ja) |
| EP (1) | EP1703353B1 (ja) |
| JP (1) | JP4886201B2 (ja) |
| DE (1) | DE602006000962T2 (ja) |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007301654A (ja) * | 2006-05-09 | 2007-11-22 | Fujitsu Ltd | 複数の車軸を有する移動ロボット |
| JP2008265697A (ja) * | 2007-04-25 | 2008-11-06 | Toyota Motor Corp | 倒立車輪型移動体、及びその制御方法 |
| JP2009101788A (ja) * | 2007-10-22 | 2009-05-14 | Toyota Motor Corp | 倒立車輪型移動体及びその制御方法 |
| JP2009208509A (ja) * | 2008-02-29 | 2009-09-17 | Yanmar Co Ltd | 作業車両 |
| JP2009214857A (ja) * | 2008-03-13 | 2009-09-24 | Equos Research Co Ltd | 車両 |
| JP2009214670A (ja) * | 2008-03-10 | 2009-09-24 | Toyota Central R&D Labs Inc | 倒立振子型車輪移動体 |
| JP2010116035A (ja) * | 2008-11-12 | 2010-05-27 | Equos Research Co Ltd | 車両 |
| JP2010116037A (ja) * | 2008-11-12 | 2010-05-27 | Equos Research Co Ltd | 車両 |
| JP2010173604A (ja) * | 2009-02-02 | 2010-08-12 | Equos Research Co Ltd | 車両 |
| JP2010173406A (ja) * | 2009-01-28 | 2010-08-12 | Equos Research Co Ltd | 車両 |
| KR101013936B1 (ko) * | 2008-09-04 | 2011-02-14 | 한국과학기술원 | 가변형 보조바퀴를 통하여 자세와 위치를 독립적으로 제어할 수 있는 평행형 2륜 구동장치 및 그 제어방법 |
| KR101151273B1 (ko) | 2012-03-08 | 2012-06-14 | 오세진 | 밸런싱 기능을 구비한 로봇 |
| JP2013540057A (ja) * | 2010-08-27 | 2013-10-31 | アルデバラン ロボティクス エス、ア | 転倒管理能力を有するヒューマノイドロボットおよび転倒を管理する方法 |
| US8958976B2 (en) | 2009-05-28 | 2015-02-17 | Toyota Jidosha Kabushiki Kaisha | Traveling apparatus, control method therefor, and control program |
| JP2019119028A (ja) * | 2018-01-10 | 2019-07-22 | 株式会社日立製作所 | 移動体、動作制御システム、及び移動体システム |
| KR20210026314A (ko) * | 2019-08-29 | 2021-03-10 | 삼성전자주식회사 | 캐스터 장치, 이를 구비하는 로봇 및 로봇 구동 방법 |
| WO2022138230A1 (ja) * | 2020-12-25 | 2022-06-30 | ソニーグループ株式会社 | 移動体 |
| WO2022153634A1 (ja) * | 2021-01-18 | 2022-07-21 | 株式会社日立製作所 | 移動体および移動体の制御方法 |
| JP2022173637A (ja) * | 2021-05-10 | 2022-11-22 | 株式会社日立ビルシステム | ロボット制御装置、及びこれを使用した移動ロボット |
| US20230409051A1 (en) * | 2022-06-15 | 2023-12-21 | Hyundai Motor Company | Apparatus for Controlling Robot and Method Thereof |
| JP2024159792A (ja) * | 2019-07-10 | 2024-11-08 | デカ・プロダクツ・リミテッド・パートナーシップ | 自律的デバイスのリアルタイム制御のためのシステムおよび方法 |
| KR102946400B1 (ko) | 2020-11-17 | 2026-04-02 | 삼성전자주식회사 | 이동 로봇 장치 및 이의 제어 방법 |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006136962A (ja) * | 2004-11-11 | 2006-06-01 | Hitachi Ltd | 移動ロボット |
| US7481285B1 (en) * | 2005-04-01 | 2009-01-27 | Bobbie Savage | Lifting and steering assembly |
| US7798264B2 (en) * | 2006-11-02 | 2010-09-21 | Hutcheson Timothy L | Reconfigurable balancing robot and method for dynamically transitioning between statically stable mode and dynamically balanced mode |
| CN101541629A (zh) * | 2006-11-30 | 2009-09-23 | 爱考斯研究株式会社 | 行驶车辆 |
| JP4779982B2 (ja) * | 2007-02-02 | 2011-09-28 | トヨタ自動車株式会社 | 移動体及び移動体の制御方法 |
| JP4867823B2 (ja) * | 2007-07-09 | 2012-02-01 | トヨタ自動車株式会社 | 倒立車輪型移動体、及びその制御方法 |
| CN101784437B (zh) * | 2007-08-10 | 2012-04-18 | 爱考斯研究株式会社 | 车辆 |
| CN101821122A (zh) * | 2007-12-27 | 2010-09-01 | 爱考斯研究株式会社 | 车辆 |
| US8041456B1 (en) | 2008-10-22 | 2011-10-18 | Anybots, Inc. | Self-balancing robot including an ultracapacitor power source |
| US8160747B1 (en) | 2008-10-24 | 2012-04-17 | Anybots, Inc. | Remotely controlled self-balancing robot including kinematic image stabilization |
| US8442661B1 (en) * | 2008-11-25 | 2013-05-14 | Anybots 2.0, Inc. | Remotely controlled self-balancing robot including a stabilized laser pointer |
| US8369991B2 (en) * | 2008-12-19 | 2013-02-05 | Honda Motor Co., Ltd. | Humanoid fall direction change among multiple objects |
| US8332068B2 (en) * | 2008-12-19 | 2012-12-11 | Honda Motor Co., Ltd. | Intelligent stepping for humanoid fall direction change |
| CN101554726B (zh) * | 2009-05-15 | 2011-01-19 | 北京工业大学 | 一种柔性两轮自平衡机器人系统及其运动控制方法 |
| CN101590323B (zh) * | 2009-07-08 | 2012-10-31 | 北京工业大学 | 独轮机器人系统及其控制方法 |
| US9020639B2 (en) * | 2009-08-06 | 2015-04-28 | The Regents Of The University Of California | Multimodal dynamic robotic systems |
| KR101687630B1 (ko) * | 2010-01-11 | 2016-12-20 | 삼성전자주식회사 | 보행 로봇 및 그 균형 제어 방법 |
| US8910951B2 (en) * | 2010-03-21 | 2014-12-16 | Smarte Carte, Inc. | Caster wheel arrangements |
| US8100205B2 (en) | 2010-04-06 | 2012-01-24 | Robotex Inc. | Robotic system and method of use |
| US8562387B1 (en) * | 2010-04-09 | 2013-10-22 | Gary R. Henthorne | Driving mechanism for remote control toy vehicle |
| US8788096B1 (en) | 2010-05-17 | 2014-07-22 | Anybots 2.0, Inc. | Self-balancing robot having a shaft-mounted head |
| US9044863B2 (en) | 2013-02-06 | 2015-06-02 | Steelcase Inc. | Polarized enhanced confidentiality in mobile camera applications |
| JP5772865B2 (ja) * | 2013-04-17 | 2015-09-02 | トヨタ自動車株式会社 | 安全制御装置、安全制御方法、及び制御プログラム |
| DE102014113278B4 (de) * | 2014-09-15 | 2016-08-25 | Freee Mobility Gmbh | Stützsystem, elektronisch selbstbalancierter Rollstuhl, Verfahren zum Steuern eines Stützsystems und Umrüstsatz |
| US9475193B2 (en) * | 2015-02-09 | 2016-10-25 | Harris Corporation | Unmanned ground vehicle stability control |
| US9975258B2 (en) | 2015-07-09 | 2018-05-22 | Facebook, Inc. | Air flow cooling system and self balancing robot incorporating the same |
| US9759267B2 (en) | 2015-07-09 | 2017-09-12 | Facebook, Inc. | Torque limiting clutch for use with robot arm |
| US9908573B2 (en) * | 2015-07-09 | 2018-03-06 | Facebook, Inc. | Self-balancing robot |
| US10328836B2 (en) * | 2015-09-23 | 2019-06-25 | Amazon Technologies, Inc. | Actively balanced mobile drive unit |
| JPWO2017073055A1 (ja) * | 2015-10-27 | 2018-08-16 | パナソニックIpマネジメント株式会社 | 搬送装置 |
| US10583056B2 (en) | 2015-11-23 | 2020-03-10 | Quantum Robotic Systems Inc. | Stair traversing device |
| EP3311786A1 (en) * | 2016-10-21 | 2018-04-25 | Airbus Defence and Space Limited | Vehicle wheel assembly |
| US11407120B2 (en) * | 2017-04-28 | 2022-08-09 | Sony Corporation | Control device, and control method |
| US11221497B2 (en) | 2017-06-05 | 2022-01-11 | Steelcase Inc. | Multiple-polarization cloaking |
| RU2656926C1 (ru) * | 2017-06-08 | 2018-06-07 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Поволжский государственный технологический университет" | Амфибийная многоцелевая транспортно-технологическая платформа |
| US10471609B2 (en) * | 2017-06-10 | 2019-11-12 | Benjamin F. Dorfman | Secured computer system |
| CN107323554A (zh) * | 2017-08-11 | 2017-11-07 | 广东奥讯智能设备技术有限公司 | 机器人底盘及机器人 |
| CN108068658B (zh) * | 2017-12-25 | 2021-03-02 | 南京涵曦月自动化科技有限公司 | 底盘高适应型磁悬浮列车 |
| US10719085B2 (en) * | 2018-02-22 | 2020-07-21 | Boston Dynamics, Inc. | Mobile robot sitting and standing |
| US11106124B2 (en) | 2018-02-27 | 2021-08-31 | Steelcase Inc. | Multiple-polarization cloaking for projected and writing surface view screens |
| CN108748189A (zh) * | 2018-06-21 | 2018-11-06 | 芜湖易泽中小企业公共服务股份有限公司 | 一种不易倾倒的防爆机器人 |
| RU2703379C1 (ru) * | 2019-04-17 | 2019-10-16 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Поволжский государственный технологический университет" | Многоцелевая транспортно-технологическая платформа |
| CN111907613B (zh) * | 2019-12-20 | 2021-11-30 | 宁波大学 | 一种智能机器人 |
| CN111284582B (zh) * | 2020-03-26 | 2023-11-17 | 行星算力(深圳)科技有限公司 | 一种多功能全地形运输机器人 |
| US12054022B2 (en) * | 2020-09-14 | 2024-08-06 | Lg Electronics Inc. | Robot |
| CN112572634B (zh) * | 2020-11-16 | 2023-03-31 | 长春工业大学 | 一种轮足混合行走机器人结构及控制系统 |
| US11760127B2 (en) * | 2020-12-03 | 2023-09-19 | Saudi Arabian Oil Company | Two-wheel compact inspection crawler with automatic probe normalization |
| CN113022890B (zh) * | 2021-04-06 | 2022-07-12 | 哈尔滨工业大学 | 一种基于摆动悬架的轮腿复合行星探测车 |
| CN113184054B (zh) * | 2021-05-20 | 2023-09-15 | 上海擎朗智能科技有限公司 | 机器人底盘及机器人底盘控制方法 |
| CN113879424A (zh) * | 2021-10-27 | 2022-01-04 | 珠海一微半导体股份有限公司 | 一种多移动结构的智能机器人及其控制方法 |
| CN114435500A (zh) * | 2022-01-17 | 2022-05-06 | 重庆理工大学 | 复杂地形下平衡移动机器人及其控制方法 |
| CN114633821B (zh) * | 2022-04-27 | 2023-07-14 | 北京理工大学 | 一种火车运输装甲车辆的辅助轮腿机器人及其使用方法 |
| CN116476949B (zh) * | 2023-04-11 | 2026-03-06 | 中铁第一勘察设计院集团有限公司 | 一种过轨agv及控制方法 |
| CN117125170A (zh) * | 2023-05-17 | 2023-11-28 | 湖北文理学院 | 一种物流机器人 |
| CN118949192B (zh) * | 2024-10-16 | 2025-03-21 | 扬州大学附属医院(扬州市第一人民医院) | 一种多功能输液架 |
| CN121264890B (zh) * | 2025-12-09 | 2026-02-24 | 追觅创新科技(苏州)有限公司 | 清洁机器人的控制方法、装置、清洁机器人、设备及介质 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63237881A (ja) * | 1987-03-26 | 1988-10-04 | 工業技術院長 | ロボツトの制御方法及びその装置 |
| JPS6478987A (en) * | 1987-09-18 | 1989-03-24 | Mitsubishi Heavy Ind Ltd | Leg drive control method for moving robot with legs |
| JPH0224789A (ja) * | 1988-07-14 | 1990-01-26 | Fuji Electric Co Ltd | 自動販売機のデータ設定装置 |
| JPH02212906A (ja) * | 1989-02-14 | 1990-08-24 | Toshiba Corp | 多脚型移動装置 |
| JPH1148170A (ja) * | 1997-08-04 | 1999-02-23 | Honda Motor Co Ltd | 脚式移動ロボットの制御装置 |
| JP2003205480A (ja) * | 2002-01-11 | 2003-07-22 | Ishikawajima Harima Heavy Ind Co Ltd | 脚車輪型移動ロボット |
| JP2003334773A (ja) * | 2002-05-14 | 2003-11-25 | Sanyo Electric Co Ltd | 二足歩行ロボット |
| JP2004217170A (ja) * | 2003-01-17 | 2004-08-05 | Sony Corp | 2輪車および車体制動装置 |
| JP2004291799A (ja) * | 2003-03-26 | 2004-10-21 | Toyota Motor Corp | 移動台車 |
| JP2005288587A (ja) * | 2004-03-31 | 2005-10-20 | Advanced Telecommunication Research Institute International | 倒立振子ロボット |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2530652B2 (ja) | 1987-06-05 | 1996-09-04 | シ−ケ−ディ株式会社 | 同軸二輪車における姿勢制御方法 |
| US6553271B1 (en) * | 1999-05-28 | 2003-04-22 | Deka Products Limited Partnership | System and method for control scheduling |
| JP3555107B2 (ja) * | 1999-11-24 | 2004-08-18 | ソニー株式会社 | 脚式移動ロボット及び脚式移動ロボットの動作制御方法 |
| SE0004466D0 (sv) * | 2000-12-04 | 2000-12-04 | Abb Ab | Mobile Robot |
| JP4063560B2 (ja) | 2002-03-18 | 2008-03-19 | 株式会社国際電気通信基礎技術研究所 | コミュニケーションロボット |
| JP4411867B2 (ja) * | 2003-06-04 | 2010-02-10 | トヨタ自動車株式会社 | 重心移動により操舵可能な車両 |
| JP4417902B2 (ja) * | 2005-10-31 | 2010-02-17 | 株式会社東芝 | 車輪移動型ロボット |
| US7798264B2 (en) * | 2006-11-02 | 2010-09-21 | Hutcheson Timothy L | Reconfigurable balancing robot and method for dynamically transitioning between statically stable mode and dynamically balanced mode |
-
2005
- 2005-03-14 JP JP2005070259A patent/JP4886201B2/ja not_active Expired - Fee Related
-
2006
- 2006-02-09 US US11/349,920 patent/US7677345B2/en not_active Expired - Fee Related
- 2006-02-10 EP EP06002743A patent/EP1703353B1/en not_active Ceased
- 2006-02-10 DE DE602006000962T patent/DE602006000962T2/de not_active Expired - Lifetime
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63237881A (ja) * | 1987-03-26 | 1988-10-04 | 工業技術院長 | ロボツトの制御方法及びその装置 |
| JPS6478987A (en) * | 1987-09-18 | 1989-03-24 | Mitsubishi Heavy Ind Ltd | Leg drive control method for moving robot with legs |
| JPH0224789A (ja) * | 1988-07-14 | 1990-01-26 | Fuji Electric Co Ltd | 自動販売機のデータ設定装置 |
| JPH02212906A (ja) * | 1989-02-14 | 1990-08-24 | Toshiba Corp | 多脚型移動装置 |
| JPH1148170A (ja) * | 1997-08-04 | 1999-02-23 | Honda Motor Co Ltd | 脚式移動ロボットの制御装置 |
| JP2003205480A (ja) * | 2002-01-11 | 2003-07-22 | Ishikawajima Harima Heavy Ind Co Ltd | 脚車輪型移動ロボット |
| JP2003334773A (ja) * | 2002-05-14 | 2003-11-25 | Sanyo Electric Co Ltd | 二足歩行ロボット |
| JP2004217170A (ja) * | 2003-01-17 | 2004-08-05 | Sony Corp | 2輪車および車体制動装置 |
| JP2004291799A (ja) * | 2003-03-26 | 2004-10-21 | Toyota Motor Corp | 移動台車 |
| JP2005288587A (ja) * | 2004-03-31 | 2005-10-20 | Advanced Telecommunication Research Institute International | 倒立振子ロボット |
Cited By (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007301654A (ja) * | 2006-05-09 | 2007-11-22 | Fujitsu Ltd | 複数の車軸を有する移動ロボット |
| JP2008265697A (ja) * | 2007-04-25 | 2008-11-06 | Toyota Motor Corp | 倒立車輪型移動体、及びその制御方法 |
| WO2008133001A1 (ja) * | 2007-04-25 | 2008-11-06 | Toyota Jidosha Kabushiki Kaisha | 倒立車輪型移動体、及びその制御方法 |
| US8371410B2 (en) | 2007-04-25 | 2013-02-12 | Toyota Jidosha Kabushiki Kaisha | Inverted wheel type moving body and method of controlling the same |
| JP2009101788A (ja) * | 2007-10-22 | 2009-05-14 | Toyota Motor Corp | 倒立車輪型移動体及びその制御方法 |
| JP2009208509A (ja) * | 2008-02-29 | 2009-09-17 | Yanmar Co Ltd | 作業車両 |
| JP2009214670A (ja) * | 2008-03-10 | 2009-09-24 | Toyota Central R&D Labs Inc | 倒立振子型車輪移動体 |
| US8151912B2 (en) | 2008-03-10 | 2012-04-10 | Toyota Jidosha Kabushiki Kaisha | Wheeled inverted pendulum mobile unit |
| JP2009214857A (ja) * | 2008-03-13 | 2009-09-24 | Equos Research Co Ltd | 車両 |
| KR101013936B1 (ko) * | 2008-09-04 | 2011-02-14 | 한국과학기술원 | 가변형 보조바퀴를 통하여 자세와 위치를 독립적으로 제어할 수 있는 평행형 2륜 구동장치 및 그 제어방법 |
| JP2010116035A (ja) * | 2008-11-12 | 2010-05-27 | Equos Research Co Ltd | 車両 |
| JP2010116037A (ja) * | 2008-11-12 | 2010-05-27 | Equos Research Co Ltd | 車両 |
| JP2010173406A (ja) * | 2009-01-28 | 2010-08-12 | Equos Research Co Ltd | 車両 |
| JP2010173604A (ja) * | 2009-02-02 | 2010-08-12 | Equos Research Co Ltd | 車両 |
| US8958976B2 (en) | 2009-05-28 | 2015-02-17 | Toyota Jidosha Kabushiki Kaisha | Traveling apparatus, control method therefor, and control program |
| JP2013540057A (ja) * | 2010-08-27 | 2013-10-31 | アルデバラン ロボティクス エス、ア | 転倒管理能力を有するヒューマノイドロボットおよび転倒を管理する方法 |
| KR101151273B1 (ko) | 2012-03-08 | 2012-06-14 | 오세진 | 밸런싱 기능을 구비한 로봇 |
| JP7081926B2 (ja) | 2018-01-10 | 2022-06-07 | 株式会社日立製作所 | 移動体、動作制御システム、及び移動体システム |
| JP2019119028A (ja) * | 2018-01-10 | 2019-07-22 | 株式会社日立製作所 | 移動体、動作制御システム、及び移動体システム |
| JP2024159792A (ja) * | 2019-07-10 | 2024-11-08 | デカ・プロダクツ・リミテッド・パートナーシップ | 自律的デバイスのリアルタイム制御のためのシステムおよび方法 |
| JP7820455B2 (ja) | 2019-07-10 | 2026-02-25 | デカ・プロダクツ・リミテッド・パートナーシップ | 自律的デバイスのリアルタイム制御のためのシステムおよび方法 |
| KR20210026314A (ko) * | 2019-08-29 | 2021-03-10 | 삼성전자주식회사 | 캐스터 장치, 이를 구비하는 로봇 및 로봇 구동 방법 |
| KR102723223B1 (ko) * | 2019-08-29 | 2024-10-30 | 삼성전자주식회사 | 캐스터 장치, 이를 구비하는 로봇 및 로봇 구동 방법 |
| KR102946400B1 (ko) | 2020-11-17 | 2026-04-02 | 삼성전자주식회사 | 이동 로봇 장치 및 이의 제어 방법 |
| WO2022138230A1 (ja) * | 2020-12-25 | 2022-06-30 | ソニーグループ株式会社 | 移動体 |
| WO2022153634A1 (ja) * | 2021-01-18 | 2022-07-21 | 株式会社日立製作所 | 移動体および移動体の制御方法 |
| JP2022173637A (ja) * | 2021-05-10 | 2022-11-22 | 株式会社日立ビルシステム | ロボット制御装置、及びこれを使用した移動ロボット |
| JP7489353B2 (ja) | 2021-05-10 | 2024-05-23 | 株式会社日立ビルシステム | ロボット制御装置、及びこれを使用した移動ロボット |
| US20230409051A1 (en) * | 2022-06-15 | 2023-12-21 | Hyundai Motor Company | Apparatus for Controlling Robot and Method Thereof |
| US12287646B2 (en) * | 2022-06-15 | 2025-04-29 | Hyundai Motor Company | Apparatus for controlling robot and method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1703353A1 (en) | 2006-09-20 |
| DE602006000962D1 (de) | 2008-06-05 |
| EP1703353B1 (en) | 2008-04-23 |
| US7677345B2 (en) | 2010-03-16 |
| JP4886201B2 (ja) | 2012-02-29 |
| US20060243499A1 (en) | 2006-11-02 |
| DE602006000962T2 (de) | 2009-05-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4886201B2 (ja) | 移動ロボット | |
| CN101687529B (zh) | 车轮倒立摆型移动体及其控制方法 | |
| US10137042B2 (en) | Travelling apparatus | |
| JP4872276B2 (ja) | 走行体 | |
| JP4574016B2 (ja) | クラスタ−車輪乗物で階段を登るためのシステム及び方法 | |
| US20190231617A1 (en) | Mobility assistance vehicle designed to negotiate obstacles | |
| JP2003266337A (ja) | 2足歩行ロボット | |
| JP2024019261A (ja) | 移動装置 | |
| CN215663718U (zh) | 两轮摆锤式自适应越障机器人 | |
| JP4824492B2 (ja) | 移動型ロボット | |
| JP2009101898A (ja) | 倒立車輪型移動体、及びその制御方法 | |
| JP5360178B2 (ja) | 走行体 | |
| CN112158273B (zh) | 一种台阶自适应行走方法及装置 | |
| KR20160003497A (ko) | 플리퍼를 구비한 로봇의 이동 플랫폼 | |
| JP2012224250A (ja) | 車輪型移動体 | |
| KR102874236B1 (ko) | 계단 승월 모드가 구비되는 주행 로봇 | |
| US20220371869A1 (en) | Person lifting and fall protection vehicle | |
| JP5092683B2 (ja) | 倒立車輪型移動体及びその制御方法 | |
| Ghani et al. | A DWI-phase fuzzy control structure for an auto-mode stair climbing wheelchair | |
| KR101613451B1 (ko) | 자이로스코프를 이용한 차량 제어 장치 및 그 방법 | |
| JPS6033172A (ja) | 走行・歩行装置 | |
| JPH07246940A (ja) | 階段等用走行装置 | |
| JP2002284048A (ja) | 電動車 | |
| JP2007314078A (ja) | キャリー | |
| JP2006263104A (ja) | 電動車椅子 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080904 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080909 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091006 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100302 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100427 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20100427 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110418 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110524 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110822 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20110829 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111206 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111209 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141216 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4886201 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |