JP2009222012A - 吸気制御装置 - Google Patents
吸気制御装置 Download PDFInfo
- Publication number
- JP2009222012A JP2009222012A JP2008069778A JP2008069778A JP2009222012A JP 2009222012 A JP2009222012 A JP 2009222012A JP 2008069778 A JP2008069778 A JP 2008069778A JP 2008069778 A JP2008069778 A JP 2008069778A JP 2009222012 A JP2009222012 A JP 2009222012A
- Authority
- JP
- Japan
- Prior art keywords
- valve
- region
- target position
- rotation angle
- internal combustion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Control Of Throttle Valves Provided In The Intake System Or In The Exhaust System (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
【課題】回転運動する制御対象を、メカ機構を備えることなく、任意の目標位置に高速、且つ正確に移動させることが可能な吸気制御装置を提供する。
【解決手段】内燃機関の始動時に当該内燃機関への吸入空気量を調整する吸気制御装置1は、3相モータ50により回転駆動し、吸気通路の開口面積を調節するバルブ4と、当該バルブ4の回転角を検出する回転角検出部17と、内燃機関の始動時のバルブ4の位置である目標位置を設定する目標位置設定部16と、バルブ4の現在位置から目標位置までの角度に応じてバルブ4の回転経路を一定領域及び残余領域のいずれか一方に決定する回転角決定部13と、内燃機関の始動前に3相各相のモータ電流をPWM制御によって制御して、バルブ4を一定領域毎又は残余領域毎に回転させて目標位置にするインバータ制御部10とを備える。
【選択図】図3
【解決手段】内燃機関の始動時に当該内燃機関への吸入空気量を調整する吸気制御装置1は、3相モータ50により回転駆動し、吸気通路の開口面積を調節するバルブ4と、当該バルブ4の回転角を検出する回転角検出部17と、内燃機関の始動時のバルブ4の位置である目標位置を設定する目標位置設定部16と、バルブ4の現在位置から目標位置までの角度に応じてバルブ4の回転経路を一定領域及び残余領域のいずれか一方に決定する回転角決定部13と、内燃機関の始動前に3相各相のモータ電流をPWM制御によって制御して、バルブ4を一定領域毎又は残余領域毎に回転させて目標位置にするインバータ制御部10とを備える。
【選択図】図3
Description
本発明は、内燃機関の始動時に当該内燃機関への吸入空気量を調整する吸気制御装置に関する。
内燃機関の負荷状態や吸気弁の開閉状態に応じてタイミング良く吸入空気量を調整すると、特に低中速域の吸気脈動を強化することで、体積効率アップによるエンジン出力向上、吸入流速アップによる燃焼改善、スモーク低減等につながり、燃費の改善等が見込まれる。従来、吸入空気量を調整するための技術として、吸気通路の吸気弁よりも上流側にバルブを設け、適宜このバルブを開閉させる方法が用いられてきた(例えば、特許文献1、及び2)。
特許文献1に記載のスロットルバルブ制御装置が有するスロットルバルブは、回転自在に支持されるスロットルシャフトに固定され、モータにより回転駆動される。当該スロットルバルブの位置は、スロットルポジションセンサにより検出される。スロットルバルブを制御するスロットルバルブコントロールユニットは、スロットルポジションセンサから出力されるスロットル実開度信号を取り込み、当該スロットル実開度信号と、スロットルバルブの目標開度から演算されたスロットル目標開度信号とが一致するように制御する。
特許文献2に記載の内燃機関の吸入空気量制御装置が有するスロットルバルブの近傍には、スロットル開度を検出するためのスロットルセンサが設けられており、当該スロットルセンサはスロットル開度に応じた検出信号を出力する。当該出力に基づき、吸気制御弁等を制御する電子制御装置はエンジンの運転状態を判定し、当該吸気制御弁の開弁時期及び閉弁時期を決定するパラメータを設定する。
ここで、内燃機関の始動時にあっては、バルブが全閉状態であると、エンジン内の吸入空気量が不足するため始動が困難となったり、或いは、一旦始動したエンジンがエンストを起こしたりする場合がある。したがって、内燃機関の始動時には、吸入吸気量を多くするために、バルブを全開状態とすることが望ましい。
特許文献1に記載のスロットルバルブ制御装置では、内燃機関の始動時に、リターンスプリングによりスロットルバルブと吸気通路との間に隙間が形成される。したがって、内燃機関の始動時には、この隙間を介して空気の吸入を行うことが可能である。しかしながら、前記隙間により形成されるスロットルバルブの開弁状態は、全開状態よりも全閉状態の方に近いため、吸入空気量が不足してしまう可能性がある。また、メカ機構(リターンスプリング)を備える必要があるため、コストアップとなってしまう。また、メカ機構によれば、その構成によっては、一部制御に制限がかかり自由度が低下してしまう可能性がある。更には、当該スロットルバルブ制御装置の構成によれば、内燃機関の始動後、アイドリング状態に移行する際に、スロットルバルブが一旦、全閉状態となってしまい、吸入空気量が不足してしまう可能性がある。
特許文献2に記載の内燃機関の吸入空気量制御装置は、目標値まで制御対象を移動させるために高電圧を印加する必要があり、急加速した場合には目標値を通り越してしまう可能性がある。
本発明は、上記の課題に鑑みてなされたものであり、その目的は、回転運動する制御対象を、メカ機構を備えることなく、任意の目標位置に高速、且つ正確に移動させることが可能な吸気制御装置を提供することにある。
上記目的を達成するための本発明に係る吸気制御装置の特徴構成は、内燃機関の始動時に前記内燃機関への吸入空気量を調整するために、3相モータにより回転駆動し、吸気通路の開口面積を調節するバルブと、当該バルブの回転角を検出する回転角検出部と、前記始動時の前記バルブの位置である目標位置を設定する目標位置設定部と、前記バルブの現在位置から前記目標位置までの角度に応じて、前記バルブの回転経路を予め設定された所定の角度からなる一定領域及び前記所定の角度よりも小さい角度からなる残余領域のいずれか一方に決定する回転角決定部と、前記内燃機関の始動前に、3相各相のモータ電流をPWM制御によって制御して、前記バルブを前記一定領域毎又は前記残余領域毎に回転させて前記目標位置にするインバータ制御部と、を備える点にある。
このような特徴構成であれば、バルブの現在位置から目標位置までの回転経路に応じて区分けした一定領域毎及び残余領域毎に制御を行うため、任意の目標位置に高速、且つ正確に移動させることが可能となる。また、一定領域と残余領域との設定は、回転角検出部により検出されたバルブの現在位置と目標位置とに応じて設定されるため、夫々の領域に対する制御は別途メカ機構を備えることなく実現することができる。したがって、コストアップすることなくバルブを目標位置に移動させることが可能となる。
また、前記一定領域及び前記残余領域の夫々に対して、前記バルブを加速させる加速領域と前記バルブを減速させる減速領域とを設定する加減速領域設定部を備えると好適である。
このような構成とすれば、一定領域に対して加速領域と減速領域とを設け、残余領域に対して加速領域と減速領域とを設けて制御するため、バルブの回転を精度良く制御することが可能となる。
また、前記回転角検出部は、前記残余領域における減速領域でのサンプリング周期を変更すると好適である。
このような構成とすれば、目標位置の直前に残余領域を設けることにより、バルブが目標位置に近づいた場合に、バルブの位置を精度良く特定することが可能となる。したがって、インバータ制御部が行うPWM制御の指示値のみを変更するだけで、バルブを精度良く目標位置に移動させることが可能となる。
また、前記目標位置は、前記バルブを全開状態とする位置であると好適である。
このような構成とすれば、内燃機関の始動前に、当該内燃機関の始動に適した位置にバルブを制御することが可能となる。
以下、本発明の実施形態について図面に基づいて説明する。図1は、本発明に係る吸気制御装置1を備えた内燃機関100を模式的に示した図である。吸気制御装置1は、例えば自動車のエンジン等の内燃機関100に備えられる。この吸気制御装置1は、内燃機関100の負荷状態及び当該内燃機関100の吸気弁102の開閉状態に応じて、内燃機関100が有する吸気通路101の開口面積を調節することにより燃焼室に導入される吸入空気量を調節する。
図1中に白抜き矢印で示されるように、吸入空気は、内燃機関100のピストン105の下降に伴い、インジェクタ106から噴射される燃料と共に、吸気弁102を介して燃焼室に導入される。燃焼後の排ガスは、内燃機関100のピストン105の上昇に伴い、排気弁103を介して排気通路104を通り、必要に応じて再循環され、最終的には内燃機関100から外部に排出される。
燃焼室へと導かれる吸入空気の最適流量は、エンジンの回転数及び負荷によって異なる。本吸気制御装置1は、吸気弁102の開閉タイミングに同期して、バルブ4を開閉制御することにより、吸気通路101を通り燃焼室へと導かれる吸入空気の流量を調節することができる。この吸入空気の流量の調節により、エンジンが低中速域で高負荷の場合の体積効率及び出力を向上させることができる。また、特にエンジンが低速領域で低負荷の場合は、バルブ4を絞り、吸入空気の流速を上げることによって燃焼改善が期待できる。
この吸気制御装置1は、主として、ボデー2、ボア3、バルブ4、シャフト5及びボルト7から構成される。即ち、ボデー2の内部にボア3が設けられ、ボデー2及びボア3により吸気通路101の一部が構成され、ボア3の内部にバルブ4が設けられる。ここで、バルブ4はボア3を貫通してボデー2に設けられたシャフト5にボルト7で固定される。したがって、バルブ4はシャフト5により回動自在に支持され、吸気通路101の開口面積を調節することが可能となる。また、シャフト5は、その一端が3相モータ50と接続される(詳細は後述する)。ボア3は、その内周面が吸気通路101となり、バルブ4を収納する筒状の部材からなる。また、ボデー2は、ボア3をその外周面及び軸芯方向の両端面から保持してボア3と連通し、吸気通路101を形成する。
図2は、ボア3の拡大断面図であり、特にバルブ4の全開状態及び全閉状態に関して示した図である。図2(a)は、バルブ4が全開状態にされた場合のボア3の断面図を示したものである。図2(a)に示されるようにバルブ4は、吸気通路101を貫通するシャフト5によって回動自在に支持されて、吸気通路101の開口面積を調節する。シャフト5は、その延伸方向でユニバーサルジョイント(図示せず)等によって3相モータ50と接続される。3相モータ50は、エンジンの負荷や吸気弁102の制御状態等に基づいて制御される。
ボア3は内周面が吸気通路101となり、バルブ4による吸気通路101の全閉状態を図2(b)及び図2(c)に示されるようなバルブ4の回動方向に沿った所定角度θ1に亘って維持するための凹形状6を有し、バルブ4を収納する筒状の部材からなる。また、ボデー2は、ボア3を一方の端面側及び外周面側から包持し、ボア3と連通して吸気通路101を形成する部材からなる。
ボア3は、その外周面において、ボデー2とOリング(弾性シール部材)8を介して保持される。Oリング8は、吸気通路101における気密を確保すると共に、ボデー2とボア3との間に生じる、がたつきを吸収する。ボデー2とボア3とはシャフト5に対して同軸に配置され、バルブ4はボルト7によって、バルブ4の中心を貫通するシャフト5に締結される。
上述のようにボア3の内面には、凹形状6が形成される。円板形状のバルブ4が回動し、当該円板形状における端部が凹形状6内に位置すると、吸気通路101は、バルブ4により全閉状態とされる。例えば、バルブ4が、吸気通路101に沿う方向に対して垂直の回動位置、即ち中央位置にある時にも、バルブ4の端部が凹形状6内に位置しているため、吸気通路101は全閉状態となる。凹形状6は、この中央位置に対して回動方向の前後θ1/2(±θ1/2)を全閉状態とするように形成される。この凹形状6は、回動するバルブ4の端部の軌跡に合わせてボア3の内面がシャフト5に沿う方向視において円弧状となるように削られて形成される。従って、ボア3の内面とバルブ4の端部とは、バルブ4が上記垂直の回動位置(中央位置)にあるときの前後θ1/2(±θ1/2)において、常に同じクリアランスとなり、吸気通路101の全閉状態が維持される。本発明に係る吸気制御装置1の場合、所定角度θ1は、例えば20〜40度(±10〜20度)であると好適である。なお、ボア3とバルブ4とは、特に閉弁時におけるクリアランスを可能な限り小さくして、吸入空気のリーク量を少なくすると好適である。また、このようにリーク量を少なくした場合における吸気通路101の閉弁状態が回転イナーシャによって受ける影響を可能な限り抑制すると好適である。
バルブ4は、吸気通路101の直交断面とほぼ同じ形状である。上述のようにボア3には凹形状6が形成されるため、例えば図2に示される上下方向で、少し肉厚を増して形成される。このため、ボデー2からボア3の方向へ流れる吸入空気が、ボア3の端面に衝突して抵抗となる可能性がある。したがって、ボア3の端部には、この抵抗を低減するために、面取り部9が設けられると好適である。
上述のように、図2(a)は、バルブ4が全開状態にされた場合のボア3の断面図を示したものである。全開状態では、吸気通路101において、吸入空気がボア3を連通する開口面積が最大となるように円盤形状のバルブ4が、吸気通路101に沿う方向に対して平行の回動位置となるように、3相モータ50により回転制御される。
図3は、本発明に係る吸気制御装置1の機能構成を模式的に示した図である。吸気制御装置1は、上述のバルブ4及び3相モータ50の他に、インバータ制御部10、インバータ11、加減速領域設定部12、回転角決定部13、回転角設定部14、残余角演算部15、目標位置設定部16、回転角検出部17の各機能部を備える(詳細は、後述する)。
図4は、特に、インバータ制御部10、インバータ11、及び3相モータ50の構成を示した図である。3相モータ50は、図示はしないが、永久磁石を備えるロータと、当該ロータに回転力を与えるための磁界を発生させるステータとを備える。このステータは、U相、V相、W相からなる3相のステータコイル50u、50v、50wを備える。各ステータコイルの一端は、電気的に中性な中性点で共通に接続され、Y結線される。各ステータコイルの他端は、インバータ11に接続される。
インバータ11は、図4に示されるように、電源20の正電極側にコレクタ端子が接続されたハイサイドのトランジスタTr1、Tr2、Tr3と、電源20の負電極側にエミッタ端子が接続されたローサイドのトランジスタTr4、Tr5、Tr6と、の合計6つのトランジスタTr1〜Tr6で構成される。例えば、トランジスタTr1及びトランジスタTr5のみを同時にオンさせると、電源20から第1電源ライン21、トランジスタTr1、ステータコイル50w、ステータコイル50v、トランジスタTr5を介して第2電源ライン22に電流が流れる。一方、トランジスタTr2及びトランジスタTr4のみを同時にオンさせると、電源20から第1電源ライン21、トランジスタTr2、ステータコイル50v、ステータコイル50w、トランジスタTr4を介して第2電源ライン22に電流が流れる。
このようにトランジスタTr1及びトランジスタTr5のみをオンさせた場合と、トランジスタTr2及びトランジスタTr4のみをオンさせた場合とでは、ステータコイル50v及びステータコイル50wに流れる電流の方向が異なる。そのため、各ステータコイルには電流の流れる方向に応じた電磁力が働き、当該電磁力とロータが備える永久磁石との間で引力及び斥力が発生することとなる。したがって、トランジスタTr1〜Tr6の中から選択されたハイサイドのトランジスタとローサイドのトランジスタとで形成される上下対トランジスタを順次オンさせることにより、ロータが回転力を得ることができる、即ち3相モータ50を回転駆動させることができる。
トランジスタTr1〜Tr6には、コレクタ端子にカソード端子が、またエミッタ端子にアノード端子が接続されるように夫々ダイオードD1〜D6が配設されている。ここで、各ステータコイルには、通電中にエネルギーが蓄えられるが、これらのダイオードD1〜D6は各ステータコイルの通電を停止した際に該エネルギーに起因して発生する逆起電力によって周辺部品に悪影響を及ぼさないようにするために配設されるものである。
上述のトランジスタTr1〜Tr6に対する一連の制御は、インバータ制御部10により行われる。インバータ制御部10は、PWM制御部10aとドライバ10bとから構成される。PWM制御部10aは、トランジスタTr1〜Tr6をPWM(Pulse Width Modulation)制御により動作させる。PWM制御に関しては、公知であるため説明は省略する。3相モータ50の近傍には、ロータの回転角、即ち3相モータ50の回転角を検出する回転角検出部17が備えられる。ここで、バルブ4のシャフト5は、上述のようにユニバーサルジョイント(図示せず)等によって3相モータ50の回転軸と接続されるため、ロータの回転角はバルブ4の回転角と同等となる。したがって、当該回転角検出部17によれば、3相モータ50により回転駆動し、吸気通路101の開口面積を調節するバルブ4の回転角を検出することが可能となる。したがって、以降の説明では、特に断りがない限り、回転角検出部17はバルブ4の回転角を検出するとして説明する。回転角検出部17は、ロータの回転角を電気角θに変換し、電気角θに応じた信号を出力する。尚、回転角検出部17として、例えばレゾルバを用いると好適である。勿論、他の機器により回転角検出部17を構成することも当然に可能である。エンジンの通常動作時には、回転角検出部17により検出された検出結果は、PWM制御部10aに伝達される。
PWM制御部10aは、通常動作時には、回転角検出部13から出力される検出信号と、インバータ11及び各ステータコイルの間の電流とを監視している。ここで、PWM制御部10aの駆動方式によっては、電流をモニタするのではなく、電圧をモニタする構成であっても良い。
PWM制御部10aは、例えば、2.5Vや3.3V等の低電圧で動作するマイクロコンピュータによって構成される。そのため、トランジスタTr1〜Tr6に流れる電流やトランジスタTr1〜Tr6の電気的特性によっては、トランジスタTr1〜Tr6をオンさせるためのドライブ能力が不足する虞がある。したがって、PWM制御部10aとインバータ11との間には、PWM制御部10aから出力されるPWM信号のドライブ能力を上げるドライバ10bが配設されている。このドライバ10bは、ドライバICで構成しても良いし、トランジスタで構成されたプッシュプル回路で構成しても良い。
図3に戻り、インバータ制御部10は、図示しない目標トルク算出部により算出された3相モータ50を回転するために必要な総トルクを示すバルブ制御信号が入力される。インバータ制御部10は、当該バルブ制御信号と回転角検出部17により検出された回転角とに基づいて目標トルクを算出し、当該目標トルクに基づいて3相各相のモータ電流をPWM制御により制御する。本吸気制御装置1は、このようにして内燃機関100の始動後における吸入空気量を調整する。
ここで、本吸気制御装置1には、内燃機関100の始動時に当該内燃機関100の吸入空気量を調整するために、内燃機関100の始動前にバルブ4を予め設定された目標位置(後述する)に位置するように制御する機能を備えている。そして、バルブ4を目標位置にする際、現在位置から目標位置までの回転経路を所定の角度毎に区分してバルブ4を回転制御する(詳細は後述する)。内燃機関100の始動とは、内燃機関100の燃焼室で燃料の燃焼を開始する、即ち内燃機関100が仕事を開始することを示す。また、内燃機関100の始動前とは、前記燃焼室で燃料の燃焼が開始される前である、即ち内燃機関100が仕事を行う前であることを示す。
回転角検出部17は、内燃機関100の始動に先立ち、始動信号が入力される。この始動信号は、内燃機関100を始動させるために行われるイグニション操作(例えばイグニションキーの操作や内燃機関100を始動させる始動ボタンの押下など)に応じて出力される。したがって、回転角検出部17は、始動信号により内燃機関100が始動されようとしていることを特定することが可能である。回転角検出部17は、この始動信号が入力されると、バルブ4の回転角の検出結果を後述の残余角演算部15に出力する。
目標位置設定部16は、内燃機関100の始動時におけるバルブ4の位置である目標位置の設定を行う。ここで、内燃機関100の始動時には、当該内燃機関100が吸入する吸入空気量は多い方が良い。このため、目標位置はバルブ4を開弁状態とする位置であり、特に全開状態であると好適である。したがって、目標位置設定部16は、バルブ4が全開となる位置を目標位置として設定する。
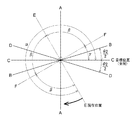
ここで、目標位置に関して図を用いて説明する。図5は、バルブ4の回転位置を概略的に示した図である。上述のようにバルブ4は3相モータ50に接続されたシャフト5を軸心として回転するが、図5においては中心点Mが当該軸心に相当する。なお、回転方向は時計回りとして説明する。また、図5中の水平方向(C−C線)に沿って吸気通路101が備えられ、A−A線を中心に±θ1/2の領域(図示せず)が凹形状6(即ち、閉弁状態とする位置)に相当する。したがって、本実施形態においては、上述の目標位置は、このC−C線に対応する位置に相当する。また、図示に示されるように、C−C線を中心とする±θ2/2の領域(B−B線及びD−D線の間の領域)は、バルブ4が全開状態となる位置に近いことから、目標位置に対する許容範囲と定めることも可能である。
図3に戻り、残余角演算部15は、回転角検出部17から伝達される検出結果と、目標位置設定部16により設定された目標位置とに基づいて、残余角を算出する。残余角とは、バルブ4の現在の位置から目標位置まで回転させるのに必要な回転角に対応する。残余角演算部15により算出された残余角は、後述の回転角決定部13に伝達される。
図5において、回転角検出部17により検出されたバルブ4の現在位置が、例えばE−E線に対応する位置にあるとすると、残余角演算部15は、E−E線に対応する位置からC−C線に対応する位置までの角度αを残余角として算出する。
ここで、本吸気制御装置1は、内燃機関100の始動前にバルブ4を目標位置に回転させる際、バルブ4の現在の位置から、目標位置までの回転経路を所定の角度毎に区分して制御する。回転角設定部14は、この所定の角度の設定を行う。本実施形態においては、この所定の角度を90度として説明する。回転角設定部14により設定された角度は、回転角決定部13に伝達される。
回転角決定部13は、バルブ4の現在位置から目標位置までの角度に応じて、バルブ4の回転経路を予め設定された所定の角度からなる一定領域及び所定の角度よりも小さい角度からなる残余領域のいずれか一方に決定する。回転経路とは、現在位置から目標位置に達するまでに回転する経路である。図5においては、E−E線の位置から時計回りに回転してC−C線の位置まで達するまでの経路、即ち角度αに対応する経路となる。また、本実施形態においては、所定の角度は、上述の回転角設定部14により設定された90度である。このため、一定領域とは、当該90度だけバルブ4が回転する際の回転経路に相当する。また、残余領域とは、当該90度に満たない回転経路に相当する。したがって、回転角決定部13は、バルブ4の現在位置から目標位置までの角度に応じて、バルブ4の回転経路を90度の角度からなる一定領域及び90度よりも小さい角度からなる残余領域のいずれか一方に決定する。この決定された領域に対応する位置が、回転制御を行うための指令位置となる。
図5においては、E−E線から90度だけ時計方向に回転してF−F線(指令位置)に移行する際の回転経路βが、一定領域に相当する。そして、F−F線からC−C線(指令位置)に移行する際の回転経路γが、残余領域に相当する。回転角決定部13により決定された一定領域及び残余領域に関する情報は、後述の加減速領域設定部12に伝達される。
加減速領域設定部12は、一定領域及び残余領域の夫々に対して、バルブ4を加速させる加速領域と当該バルブ4を減速させる減速領域とを設定する。上述のように、一定領域及び残余領域は、回転角決定部13により決定され、当該加減速領域設定部12に伝達される。加速領域とは、バルブ4を所定の位置に回転させるために加速させる領域である。また、減速領域とは、加速領域で加速されたバルブ4を所定に位置に停止させるために減速させる領域である。加減速領域設定部12は、回転角決定部13により決定された一定領域に対して加速領域と減速領域とを設定する。同様に、加減速領域設定部12は、残余領域に対しても加速領域と減速領域とを設定する。したがって、バルブ4は、一定領域から残余領域に移行する際には、一定領域の減速領域で一旦停止され、その後、残余領域の加速領域で再度加速されることとなる。なお、この一旦停止する時間は、ほんのわずかの時間であり、例えば数千分の1秒から数百分の1秒程度の時間である。
ここで、上述のようにバルブ4は、一定領域と残余領域の夫々に対して、加速及び減速を繰り返すことから、加速領域と減速領域とが、1対1の割合になるように設定されると好適である。図5における例では、E−E線からF−F線に移行する際の前半の領域β1が加速領域に設定され、後半の領域β2が減速領域に設定される。同様に、F−F線からC−C線に移行する際の前半の領域γ1が加速領域に設定され、後半の領域γ2が減速領域に設定される。加減速領域設定部12により設定された加速領域及び減速領域に関する情報は、インバータ制御部10に伝達される。
なお、この一定領域の加速領域及び減速領域の設定と、残余領域の加速領域及び減速領域の設定とは、同時に行われるわけではない。まず、バルブ4の現在位置の検出後、当該現在位置から90度回転させるために必要な加速領域と減速領域とが設定される。即ち、まず、一定領域の加速領域及び減速領域のみが設定される。そして、この一定領域の加速領域でバルブ4が加速され、減速領域に達して減速された後、停止される。ここで、回転角検出部17は回転角を常に検出している。したがって、回転角検出部17により検出された検出結果に基づいて、一定領域の減速領域において停止したバルブ4の位置が新たな現在位置として特定される。この新たな現在位置から、目標位置まで回転させるために必要な残余領域の加速領域と減速領域とを設定する。このように一定領域の加速領域及び減速領域の設定と、残余領域の加速領域及び減速領域の設定とは、別に行われる。
したがって、90度として予め設定された一定領域に対して、バルブ4が実際に回転した回転経路が90度に過不足している場合であっても、回転角検出部17により検出された検出結果に基づいて特定された新たな現在位置から残余領域における加速領域と減速領域とを設定されるため、適切にバルブ4を回転させることが可能となる。
更に、バルブ4を確実に全開状態とするために、回転角検出部17は、残余領域における減速領域でのサンプリング周期を変更すると好適である。回転角検出部17は、所定のサンプリング周期で3相モータの回転角を検出している。ここで、サンプリング周期を短くすると高精度に回転角を検出することが可能であるが、当該回転角を電気角に変換する際の演算処理が多くなる。一方、サンプリング周期を長くすると回転角を電気角に変換する際の演算処理が少なくなるが、検出する回転角の精度が低下する。したがって、回転角検出部17は、精度と演算処理とのバランスを考慮して、サンプリング周期を変更して回転角の検出を行う。即ち、本実施形態においては、目標位置に精度よくバルブ4を停止させるために、残余領域における減速領域(図5における領域γ2)ではサンプリング周期を短くする。一方、それ以外の領域(図5における領域β1、β2、γ1等)においては、演算処理を少なくするために、サンプリング周期を長くする。
また、上述のように、バルブ4が全開状態となるには、図5のC−C線を中心とする±θ2/2の領域(B−B線及びD−D線の間の領域)であれば良く、この領域は目標位置に対する許容範囲とされる。したがって、加減速領域設定部12から伝達された加速領域及び減速領域に関する情報に基づいて、この許容範囲内にバルブ4が停止するようにインバータ制御部10は、3相モータ50を加速させたり減速させたりして制御する。このようにして、本吸気制御装置1は、内燃機関100の始動前に、バルブ4が全開位置となるように高速、且つ正確に移動させることが可能となる。
次に、フローチャートを用いて説明する。図6は本吸気制御装置1が内燃機関100の始動前にバルブ4を全開状態とするためのフローチャートである。回転角検出部17は、内燃機関100を始動させるために行われるイグニション操作に応じて出力される始動信号が入力されるまで待機する(ステップ#01:No)。
回転角検出部17は、始動信号を受信すると(ステップ#01:Yes)、回転角の検出を開始する(ステップ#02)。この際の回転角検出部17が回転角を検出するサンプリング周期は、予め設定されたデフォルトのサンプリング周期となる。一方、目標位置設定部16は、バルブ4を内燃機関100の始動に適した全開状態とするために目標位置として全開位置を設定する(ステップ#03)。
残余角演算部15は、回転角検出部17から伝達されるバルブ4の現在位置を示す検出結果と、目標位置設定部16により設定された目標位置とに基づいて、残余角を算出する。バルブ4の現在位置が、目標位置の許容範囲内であれば(ステップ#04:No)、処理を終了する。一方、バルブ4が目標位置の許容範囲内でなければ(ステップ#04:Yes)、処理を継続する。
残余角が90度以上、即ちバルブ4の現在位置から目標位置までの角度が90度以上であれば(ステップ#05:Yes)、回転角決定部13は当該現在位置から時計方向に90度回転させる際のバルブ4の回転経路を一定領域として決定し、当該90度回転させた位置を以降の処理に用いる指令位置として設定する(ステップ#06)。
加減速領域設定部12は、一定領域に対して加速領域と減速領域とを設定する(ステップ#07)。本実施形態では、加速領域と減速領域との割合は1対1となるように設定されるものとする。
これらの加速領域及び減速領域に関する情報は、インバータ制御部10に伝達される。インバータ制御部10は、加速領域でバルブ4が加速するようにインバータ11に対してPWM制御信号を出力し、PWM制御を実行する(ステップ#08)。そして、回転角検出部17の検出結果に基づいて、バルブ4が減速領域に達したことを検出した場合には、減速領域でバルブ4が減速するようにインバータ11に対してPWM制御信号を出力し、PWM制御を実行する(ステップ#09)。バルブ4が減速領域を経て指令位置に達すると、インバータ制御部10はPWM制御を停止させ(ステップ#10)、ステップ#04から処理を継続する。
ステップ#05において、残余角が90度以上でない、即ちバルブ4の現在位置から目標位置までの角度が90度以上でなければ(ステップ#05:Yes)、回転角決定部13は当該現在位置から時計方向に90度回転させる際のバルブ4の回転経路を残余領域として決定する(ステップ#11)。そして、加減速領域設定部12は、残余領域に対して加速領域と減速領域とを設定する(ステップ#12)。
インバータ制御部10は、加速領域でバルブ4が加速するようにインバータ11に対してPWM制御信号を出力し、PWM制御を実行する(ステップ#13)。そして、回転角検出部17の検出結果に基づいて、バルブ4が減速領域に達したことを検出した場合には、バルブ4を目標位置で精度良く停止させるために、回転角検出部17が回転角をサンプリングするサンプリング周期を短く設定する(ステップ#14)。
そして、インバータ制御部10は、減速領域でバルブ4が減速するようにインバータ11に対してPWM制御信号を出力し、PWM制御を実行する(ステップ#15)。バルブ4が減速領域を経て指令位置(目標位置)に達すると、インバータ制御部10はPWM制御を停止させ(ステップ#16)、ステップ#04から処理を継続する。
このようなフローに基づいて、本吸気制御装置1は、内燃機関100の始動前に、メカ機構を備えることなく、バルブ4を目標位置(全開位置)に高速、且つ正確に移動させることが可能となる。
〔その他の実施形態〕
上記実施形態において、目標位置設定部16が設定する目標位置は、バルブ4が全開状態となる位置であるとして説明した。しかしながら、本発明の適用範囲は、これに限定されるものではない。例えば、目標位置を所定の開度となるような開弁状態とすることも可能である。また、本吸気制御装置1を備える内燃機関100に応じて、閉弁状態とするように設定することも当然に可能である。
上記実施形態において、目標位置設定部16が設定する目標位置は、バルブ4が全開状態となる位置であるとして説明した。しかしながら、本発明の適用範囲は、これに限定されるものではない。例えば、目標位置を所定の開度となるような開弁状態とすることも可能である。また、本吸気制御装置1を備える内燃機関100に応じて、閉弁状態とするように設定することも当然に可能である。
上記実施形態において、回転角設定部14が設定する所定の角度を90度として説明した。しかしながら、本発明の適用範囲は、これに限定されるものではない。例えば、この所定の角度は、45度とすることも可能であるし、120度とすることも可能である。或いは別の任意の角度に変更することも当然に可能である。
上記実施形態において、加減速領域設定部12は、一定領域及び残余領域の夫々に対して、加速領域と減速領域とを1対1で設定するとして説明した。しかしながら、本発明の適用範囲は、これに限定されるものではない。この1対1は単なる例示であり、他の割合に変更することは、当然に可能である。
上記実施形態において、回転角検出部17は、残余領域における減速領域でのサンプリング周期を短く変更するとして説明した。しかしながら、本発明の適用範囲は、これに限定されるものではない。サンプリング周期をデフォルトのまま残余領域における減速領域での検出を行っても、バルブ4を目標位置に停止させることは当然に可能である。
上記実施形態において、バルブ4の目標位置は回転軸に対して180度毎に生じるように図示して説明した(特に図5)。しかしながら、本発明の適用範囲は、これに限定されるものではない。例えば、バルブ4の形状に応じて、120度毎に設定することも当然に可能であるし、90度毎に設定することも当然に可能である。或いは、360度毎に設定することも可能である。
このような構成であれば、一定領域に対する処理を数回行った後、最後に残余領域に対する処理を行うことにより、バルブ4を目標位置に停止させることが可能である。即ち、図7に示されるように、現在位置から目標位置までの角度がαである場合には、回転角設定部14により設定される角度(例えば90度)に対応する3つの回転経路βに一定領域に対する処理(E−E線の現在位置からF−F線まで90度回転し、その後、その位置からE−E線の位置まで90度回転し、更に、その位置からF−F線の位置まで90度回転させる処理)を行い、1つの回転経路γに残余領域に対する処理を行うことにより、バルブ4を目標位置に精度良く回転させることが可能となる。
上記実施形態において、バルブ4は、一定領域から残余領域に移行する際には、一定領域の減速領域で一旦停止され、その後、残余領域の加速領域で再度加速されるとして説明した。そして、この一旦停止する時間は、例えば数千分の1秒から数百分の1秒程度の時間であるとして説明した。しかしながら、本発明の適用範囲は、これに限定されるものではない。これは、単なる例示であり、一旦停止する時間を上記以上の時間とすることも可能であるし、上記以下の時間とすることも可能である。
上記実施形態において、バルブ4の回転方向は例えば時計方向として説明した。しかしながら、本発明の適用範囲は、これに限定されるものではない。例えば、反時計方向として制御することも可能である。或いは、時計方向と反時計方向とを組み合わせて制御することも可能である。このような構成とすれば、例えばバルブ4が目標位置を通り過ぎてしまった場合には、インバータ制御部10が3相モータ50を逆回転させ、バルブ4を目標位置に戻すように制御することも可能である。
上記実施形態において、目標位置に対する許容範囲を、図5のC−C線を中心とする±θ2/2の領域(B−B線及びD−D線の間の領域)であれば良いとして説明した。しかしながら、本発明の適用範囲は、これに限定されるものではない。許容範囲は全開状態に限定されるものではなく、例えば、略全開状態に近い状態とすることも当然に可能である。
1:吸気制御装置
4:バルブ
10:インバータ制御部
11:インバータ
12:加減速領域設定部
13:回転角決定部
14:回転角設定部
15:残余角演算部
16:目標位置設定部
17:回転角検出部
50:3相モータ
4:バルブ
10:インバータ制御部
11:インバータ
12:加減速領域設定部
13:回転角決定部
14:回転角設定部
15:残余角演算部
16:目標位置設定部
17:回転角検出部
50:3相モータ
Claims (4)
- 内燃機関の始動時に前記内燃機関への吸入空気量を調整する吸気制御装置であって、
3相モータにより回転駆動し、吸気通路の開口面積を調節するバルブと、
当該バルブの回転角を検出する回転角検出部と、
前記始動時の前記バルブの位置である目標位置を設定する目標位置設定部と、
前記バルブの現在位置から前記目標位置までの角度に応じて、前記バルブの回転経路を予め設定された所定の角度からなる一定領域及び前記所定の角度よりも小さい角度からなる残余領域のいずれか一方に決定する回転角決定部と、
前記内燃機関の始動前に、3相各相のモータ電流をPWM制御によって制御して、前記バルブを前記一定領域毎又は前記残余領域毎に回転させて前記目標位置にするインバータ制御部と、
を備える吸気制御装置。 - 前記一定領域及び前記残余領域の夫々に対して、前記バルブを加速させる加速領域と前記バルブを減速させる減速領域とを設定する加減速領域設定部を備える請求項1に記載の吸気制御装置。
- 前記回転角検出部は、前記残余領域における減速領域でのサンプリング周期を変更する請求項2に記載の吸気制御装置。
- 前記目標位置は、前記バルブを全開状態とする位置である請求項1から3のいずれか一項に記載の吸気制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008069778A JP2009222012A (ja) | 2008-03-18 | 2008-03-18 | 吸気制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008069778A JP2009222012A (ja) | 2008-03-18 | 2008-03-18 | 吸気制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009222012A true JP2009222012A (ja) | 2009-10-01 |
Family
ID=41239038
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008069778A Pending JP2009222012A (ja) | 2008-03-18 | 2008-03-18 | 吸気制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009222012A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013044309A (ja) * | 2011-08-26 | 2013-03-04 | Denso Corp | 内燃機関の制御装置 |
| US11248610B2 (en) | 2016-05-03 | 2022-02-15 | General Electric Company | Liquid injection apparatus and compressor assembly having the same |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6011639A (ja) * | 1983-06-30 | 1985-01-21 | Isuzu Motors Ltd | 内燃機関の始動装置 |
| JPH02280696A (ja) * | 1989-04-20 | 1990-11-16 | Toyota Autom Loom Works Ltd | ステップモータの駆動制御方法 |
| JPH04308499A (ja) * | 1991-04-05 | 1992-10-30 | Matsushita Electric Ind Co Ltd | 3相ステッピングモータの駆動方法 |
| JPH05207794A (ja) * | 1992-01-23 | 1993-08-13 | Aisan Ind Co Ltd | ステッピングモータの駆動方法とその装置 |
| JPH09140191A (ja) * | 1995-11-10 | 1997-05-27 | Hitachi Ltd | 同期式モータの制御方法及びその制御方法を含んだエンジンの燃料制御装置 |
-
2008
- 2008-03-18 JP JP2008069778A patent/JP2009222012A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6011639A (ja) * | 1983-06-30 | 1985-01-21 | Isuzu Motors Ltd | 内燃機関の始動装置 |
| JPH02280696A (ja) * | 1989-04-20 | 1990-11-16 | Toyota Autom Loom Works Ltd | ステップモータの駆動制御方法 |
| JPH04308499A (ja) * | 1991-04-05 | 1992-10-30 | Matsushita Electric Ind Co Ltd | 3相ステッピングモータの駆動方法 |
| JPH05207794A (ja) * | 1992-01-23 | 1993-08-13 | Aisan Ind Co Ltd | ステッピングモータの駆動方法とその装置 |
| JPH09140191A (ja) * | 1995-11-10 | 1997-05-27 | Hitachi Ltd | 同期式モータの制御方法及びその制御方法を含んだエンジンの燃料制御装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013044309A (ja) * | 2011-08-26 | 2013-03-04 | Denso Corp | 内燃機関の制御装置 |
| CN102953852A (zh) * | 2011-08-26 | 2013-03-06 | 株式会社电装 | 用于内燃机的控制装置 |
| US11248610B2 (en) | 2016-05-03 | 2022-02-15 | General Electric Company | Liquid injection apparatus and compressor assembly having the same |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101454965B (zh) | 无刷电动机装置 | |
| KR960001454A (ko) | 유량 밸브 제어기 및 유량 밸브 제조 방법 | |
| WO2015093574A1 (ja) | エンジンユニット、及び車両 | |
| JP3665710B2 (ja) | 直流トルクモータ、およびこれを用いた駆動制御装置、スロットル弁制御装置 | |
| WO2015093575A1 (ja) | エンジンユニット、及び車両 | |
| US6622695B2 (en) | Intake control system of internal combustion engine | |
| US10422274B2 (en) | Control device for actuator, actuator, valve driving device and control method for actuator | |
| JP6115510B2 (ja) | 全閉位置学習装置 | |
| JP2009222012A (ja) | 吸気制御装置 | |
| JP5035624B2 (ja) | 吸気制御装置 | |
| JPH05240070A (ja) | 内燃機関のスロットルアクチュエータ及び内燃機関の吸入空気量制御装置 | |
| JP2010168909A (ja) | 制御弁開閉制御装置 | |
| JP3241661B2 (ja) | ディーゼル機関の吸気絞り弁制御方法及び制御装置 | |
| JPH112147A (ja) | エンジンの吸入空気量調整装置 | |
| JPH03275935A (ja) | 内燃機関の吸気制御装置 | |
| JP4962789B2 (ja) | 吸気制御装置 | |
| JPH0216328A (ja) | 内燃機関の吸気制御装置 | |
| JP7635639B2 (ja) | エンジン始動装置 | |
| JPH0694151A (ja) | ブラシレスモータ駆動バルブ開閉制御装置 | |
| JP6597283B2 (ja) | 流量アシスト装置 | |
| WO2018038062A1 (ja) | 停止制御システム | |
| WO2024135310A1 (ja) | モータ制御装置及びモータ制御方法 | |
| JPH0658192A (ja) | 内燃機関の吸気制御装置 | |
| JP4045787B2 (ja) | 内燃機関の吸気制御装置 | |
| JP4864686B2 (ja) | モータの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110224 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120329 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20120510 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A02 | Decision of refusal |
Effective date: 20120920 Free format text: JAPANESE INTERMEDIATE CODE: A02 |