JP2010142354A - 磁気共鳴イメージング装置 - Google Patents
磁気共鳴イメージング装置 Download PDFInfo
- Publication number
- JP2010142354A JP2010142354A JP2008321089A JP2008321089A JP2010142354A JP 2010142354 A JP2010142354 A JP 2010142354A JP 2008321089 A JP2008321089 A JP 2008321089A JP 2008321089 A JP2008321089 A JP 2008321089A JP 2010142354 A JP2010142354 A JP 2010142354A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- pulse
- gradient magnetic
- eddy
- eddy current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/565—Correction of image distortions, e.g. due to magnetic field inhomogeneities
- G01R33/56518—Correction of image distortions, e.g. due to magnetic field inhomogeneities due to eddy currents, e.g. caused by switching of the gradient magnetic field
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/24—Arrangements or instruments for measuring magnetic variables involving magnetic resonance for measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/243—Spatial mapping of the polarizing magnetic field
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/483—NMR imaging systems with selection of signals or spectra from particular regions of the volume, e.g. in vivo spectroscopy
- G01R33/4833—NMR imaging systems with selection of signals or spectra from particular regions of the volume, e.g. in vivo spectroscopy using spatially selective excitation of the volume of interest, e.g. selecting non-orthogonal or inclined slices
- G01R33/4835—NMR imaging systems with selection of signals or spectra from particular regions of the volume, e.g. in vivo spectroscopy using spatially selective excitation of the volume of interest, e.g. selecting non-orthogonal or inclined slices of multiple slices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/5607—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution by reducing the NMR signal of a particular spin species, e.g. of a chemical species for fat suppression, or of a moving spin species for black-blood imaging
Landscapes
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- High Energy & Nuclear Physics (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
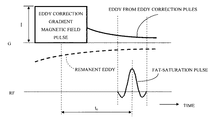
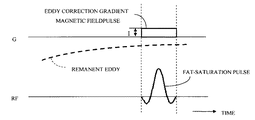
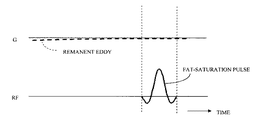
【解決手段】磁気共鳴イメージング装置は、イメージング手段および補償手段を備える。イメージング手段は、コントラストを制御するためのプレパルス(FAT-SATURATION PULSE)の印加を伴ってイメージングを行うことにより画像データを取得する。補償手段は、プレパルス(FAT-SATURATION PULSE)の印加タイミングにおいて、プレパルス(FAT-SATURATION PULSE)の印加以前に印加された傾斜磁場により発生した2次以上の空間分布を有する渦電流による残留磁場(REMANENT EDDY)を抑制する。
【選択図】 図3
Description
[数1]
rz=Sc(aZ2+bZ+c) (1)
式(1)において、a, b, cは各項の係数であり、Scはスケーリング値である。これらの係数a, b, cおよびスケーリング値Scは、装置の特性によって定まる。スケーリング値Scは、装置の特性により複数の値を有する場合もある。これはX軸方向、Y軸方向についても同様である。
[数2]
R(t)=rHexp(-t/T) (2)
ただし、式(2)においてT(Tx, Ty, Tz)は渦磁場の減衰の時定数である。時定数Tも装置の特性によってスケーリング値Scと一対のパラメータとして定まる。
[数3]
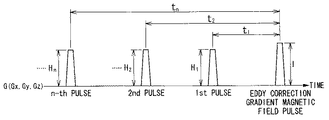
I=rH1exp(-t1/T)+rH2exp(-t2/T)+rH3exp(-t3/T)+…+rHnexp(-tn/T) (3)
ただし、式(3)において、Hiは、プレパルスの印加タイミングにより近い側から過去に遡る方向に数えてi番目の傾斜磁場パルスの強度を、tiはプレパルスとi番目の傾斜磁場パルスの印加時刻間の差(経過時間)を、それぞれ示す。
[数4]
rIexp(-tc/T)=rH1exp(-t1/T)+rH2exp(-t2/T)+rH3exp(-t3/T)+…+rHnexp(-tn/T) (4)
ただし、式(4)において、tcは、渦補正傾斜磁場パルスの印加タイミングからプレパルスの印加タイミングまでの経過時間である。
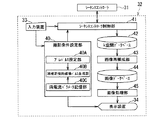
21 静磁場用磁石
22 シムコイル
23 傾斜磁場コイル
24 RFコイル
25 制御系
26 静磁場電源
27 傾斜磁場電源
28 シムコイル電源
29 送信器
30 受信器
31 シーケンスコントローラ
32 コンピュータ
33 入力装置
34 表示装置
35 演算装置
36 記憶装置
37 寝台
38 傾斜磁場電源制御コンピュータ
39 渦補償回路
39A 渦補償パラメータデータベース
40 撮像条件設定部
40A プレパルス設定部
40B 渦補正傾斜磁場パルス生成部
40C 渦電流パラメータ記憶部
41 シーケンスコントローラ制御部
42 k空間データベース
43 画像再構成部
44 画像データベース
45 画像処理部
P 被検体
Claims (12)
- コントラストを制御するためのプレパルスの印加を伴ってイメージングを行うことにより画像データを取得するイメージング手段と、
前記プレパルスの印加タイミングにおいて、前記プレパルスの印加以前に印加された傾斜磁場により発生した2次以上の空間分布を有する渦電流による残留磁場を抑制する補償手段と、
を備えることを特徴とする磁気共鳴イメージング装置。 - 前記補償手段は、前記残留磁場を打ち消すための傾斜磁場補正パルスを印加するように構成されることを特徴とする請求項1記載の磁気共鳴イメージング装置。
- 前記補償手段は、前記プレパルスの印加タイミングにおいて前記残留磁場と打ち消すための逆の極性を有する傾斜磁場補正パルスを印加するように構成されることを特徴とする請求項1記載の磁気共鳴イメージング装置。
- 前記補償手段は、前記プレパルスの印加前において傾斜磁場補正パルスを印加し、前記傾斜磁場補正パルスにより生じる渦電流による残留磁場によって前記傾斜磁場による残留磁場を打ち消すように構成されることを特徴とする請求項1記載の磁気共鳴イメージング装置。
- 前記補償手段は、前記イメージング用に印加される傾斜磁場波形を制御することによって前記残留磁場を抑制する補償回路を有することを特徴とする請求項1記載の磁気共鳴イメージング装置。
- 前記イメージング手段は、前記プレパルスとして脂肪を抑制するための脂肪抑制パルスを印加するように構成されることを特徴とする請求項1記載の磁気共鳴イメージング装置。
- 前記イメージング手段は、前記プレパルスとして、水を選択的に励起するための水選択励起パルス、所望の物質のスピンを飽和させて前記所望の物質からの信号を抑制するための、ディフェージンググラジエント傾斜磁場の印加前に印加されるサチュレーションパルス、撮像断面に流入する動体にタグ付けを行うためのスピンラベリングパルス、結合水のプロトンの磁化を飽和させ、実質臓器の信号を抑制するためのMTCパルス、スライス選択傾斜磁場とともに印加されるMTCパルスであるSORSのいずれかを印加するように構成されることを特徴とする請求項1記載の磁気共鳴イメージング装置。
- 前記補償手段は、撮影条件としてのパルスシーケンスにおいて前記残留磁場を打ち消すための傾斜磁場補正パルスの印加を設定するように構成されることを特徴とする請求項1記載の磁気共鳴イメージング装置。
- 前記補償手段は、前記イメージング中において傾斜磁場を印加するための傾斜磁場コイルに電流を供給する傾斜磁場電源を制御することによって前記残留磁場を打ち消すための傾斜磁場補正パルスを印加するように構成されることを特徴とする請求項1記載の磁気共鳴イメージング装置。
- 2次以上の空間分布を有する渦電流に関する情報を保存する渦電流パラメータ記憶手段をさらに備え、
前記補償手段は、前記渦電流に関する情報を用いて前記残留磁場を抑制するように構成されることを特徴とする請求項1記載の磁気共鳴イメージング装置。 - 前記補償手段は、2次以上の空間分布を有する渦電流に関する情報を取得するための渦測定シーケンスを実行することによって得られた前記渦電流に関する情報を用いて前記残留磁場を抑制するように構成されることを特徴とする請求項1記載の磁気共鳴イメージング装置。
- 前記補償手段は、前記イメージングにおいて励起される複数のスライス位置における渦電流による残留磁場を求めることにより前記2次以上の空間分布を有する渦電流による残留磁場を抑制するように構成されることを特徴とする請求項1記載の磁気共鳴イメージング装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008321089A JP5416960B2 (ja) | 2008-12-17 | 2008-12-17 | 磁気共鳴イメージング装置 |
| US12/634,925 US8487614B2 (en) | 2008-12-17 | 2009-12-10 | Magnetic resonance imaging apparatus/method counter-actively suppressing remnant eddy current magnetic fields generated from gradients applied before controlling contrast pre-pulses and MRI image data acquisition |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008321089A JP5416960B2 (ja) | 2008-12-17 | 2008-12-17 | 磁気共鳴イメージング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010142354A true JP2010142354A (ja) | 2010-07-01 |
| JP5416960B2 JP5416960B2 (ja) | 2014-02-12 |
Family
ID=42239726
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008321089A Expired - Fee Related JP5416960B2 (ja) | 2008-12-17 | 2008-12-17 | 磁気共鳴イメージング装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8487614B2 (ja) |
| JP (1) | JP5416960B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018523258A (ja) * | 2015-05-12 | 2018-08-16 | ティーエーイー テクノロジーズ, インコーポレイテッド | 不所望の渦電流を低減するシステムおよび方法 |
| JP2018186892A (ja) * | 2017-04-28 | 2018-11-29 | 株式会社日立製作所 | 磁気共鳴イメージング装置 |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3117768B1 (en) | 2006-05-19 | 2019-11-06 | The Queen's Medical Center | Motion tracking system and method for real time adaptive imaging and spectroscopy |
| JP5416960B2 (ja) * | 2008-12-17 | 2014-02-12 | 株式会社東芝 | 磁気共鳴イメージング装置 |
| WO2010074057A1 (ja) * | 2008-12-26 | 2010-07-01 | 株式会社 日立メディコ | 磁気共鳴イメージング装置及びパルスシーケンス調整方法 |
| JP5611661B2 (ja) * | 2009-06-04 | 2014-10-22 | 株式会社東芝 | 磁気共鳴イメージング装置 |
| JP2012040362A (ja) * | 2010-07-23 | 2012-03-01 | Toshiba Corp | 磁気共鳴イメージング方法、磁気共鳴イメージング装置およびその制御装置 |
| DE102010035539B4 (de) * | 2010-08-26 | 2012-04-05 | Siemens Aktiengesellschaft | Verfahren zur Kompensation von Wirbelstromfeldern in Magnetresonanzaufnahmen und Magnetresonanzeinrichtung |
| JP2012183233A (ja) * | 2011-03-07 | 2012-09-27 | Toshiba Corp | 磁気共鳴イメージング装置 |
| EP2747641A4 (en) | 2011-08-26 | 2015-04-01 | Kineticor Inc | METHOD, SYSTEMS AND DEVICES FOR SCAN INTERNAL MOTION CORRECTION |
| US10327708B2 (en) | 2013-01-24 | 2019-06-25 | Kineticor, Inc. | Systems, devices, and methods for tracking and compensating for patient motion during a medical imaging scan |
| US9717461B2 (en) | 2013-01-24 | 2017-08-01 | Kineticor, Inc. | Systems, devices, and methods for tracking and compensating for patient motion during a medical imaging scan |
| US9305365B2 (en) | 2013-01-24 | 2016-04-05 | Kineticor, Inc. | Systems, devices, and methods for tracking moving targets |
| WO2014120734A1 (en) | 2013-02-01 | 2014-08-07 | Kineticor, Inc. | Motion tracking system for real time adaptive motion compensation in biomedical imaging |
| US9675271B2 (en) * | 2013-03-13 | 2017-06-13 | Viewray Technologies, Inc. | Systems and methods for radiotherapy with magnetic resonance imaging |
| KR101560463B1 (ko) * | 2013-12-30 | 2015-10-16 | 가천대학교 산학협력단 | 오프 공명 라디오주파수 펄스를 사용하는 자기 공명 영상 시스템에서 인공물 및 원하지 않는 신호를 제거하는 자기 공명 영상 획득 방법 |
| WO2015148391A1 (en) | 2014-03-24 | 2015-10-01 | Thomas Michael Ernst | Systems, methods, and devices for removing prospective motion correction from medical imaging scans |
| DE102014206917B3 (de) * | 2014-04-10 | 2015-09-03 | Siemens Aktiengesellschaft | Reduzierung von Artefakten in MR-Bildern aufgrund von Suszeptibilitätssprüngen durch Ersetzen von Rohdaten aus Messungen mit einer zusätzlichen Dephasierung der Spins |
| US9734589B2 (en) | 2014-07-23 | 2017-08-15 | Kineticor, Inc. | Systems, devices, and methods for tracking and compensating for patient motion during a medical imaging scan |
| US9943247B2 (en) | 2015-07-28 | 2018-04-17 | The University Of Hawai'i | Systems, devices, and methods for detecting false movements for motion correction during a medical imaging scan |
| DE102015222114A1 (de) * | 2015-11-10 | 2017-05-11 | Siemens Healthcare Gmbh | Verfahren zum Ansteuern einer Shimeinheit, Steuereinheit und Magnetresonanzgerät |
| CN108697367A (zh) | 2015-11-23 | 2018-10-23 | 凯内蒂科尓股份有限公司 | 用于在医学成像扫描期间跟踪并补偿患者运动的系统、装置和方法 |
| US10132890B2 (en) * | 2016-03-18 | 2018-11-20 | Wisconsin Alumni Research Foundation | System and method for controlling undesired magnetic field effects in magnetic resonance imaging |
| CN107773233B (zh) * | 2016-08-31 | 2020-09-15 | 上海联影医疗科技有限公司 | 一种磁共振成像方法及装置 |
| KR101864992B1 (ko) * | 2017-03-09 | 2018-07-04 | 국립암센터 | Mri 노이즈 제거용 조성물 및 이를 이용한 패드 |
| CN107677976B (zh) * | 2017-09-26 | 2019-07-16 | 中国科学院武汉物理与数学研究所 | 一种自适应核磁共振梯度预加重波形产生装置及方法 |
| CN108209918B (zh) * | 2017-12-30 | 2021-09-07 | 上海联影医疗科技股份有限公司 | 磁共振成像方法及磁共振系统 |
| EP3617734B1 (de) * | 2018-08-28 | 2024-10-09 | Siemens Healthineers AG | Verfahren zur kompensierung von wirbelströmen während der ausgabe eines sättigungspulses bei der aufnahme von kernspinresonanzdaten |
| EP3640661B1 (en) * | 2018-10-16 | 2025-03-05 | Siemens Healthineers AG | Method and mri system for active compensation of eddy current induced magnetic fields in magnetic resonance imaging |
| AU2019417058A1 (en) | 2018-12-28 | 2021-07-22 | Hyperfine Operations, Inc. | Correcting for hysteresis in magnetic resonance imaging |
| US11698430B2 (en) * | 2019-08-15 | 2023-07-11 | Hyperfine Operations, Inc. | Eddy current mitigation systems and methods |
| EP4194878A1 (de) * | 2021-12-10 | 2023-06-14 | Siemens Healthcare GmbH | Verfahren zur automatischen kompensation von wirbelströmen in einer magnetresonanzvorrichtung |
| CN114609563A (zh) * | 2022-03-10 | 2022-06-10 | 鑫高益医疗设备股份有限公司 | 一种磁共振b0涡流补偿方法、系统、存储介质及谱仪设备 |
| CN114767086B (zh) * | 2022-05-19 | 2025-10-21 | 北京万东医疗科技股份有限公司 | 一种磁共振成像方法、装置、电子设备及存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06261877A (ja) * | 1992-10-26 | 1994-09-20 | Philips Electron Nv | 磁気共鳴画像化における渦電流補償 |
| JPH11244256A (ja) * | 1998-03-03 | 1999-09-14 | Toshiba Corp | 磁気共鳴診断装置 |
| WO2003037183A1 (fr) * | 2001-10-30 | 2003-05-08 | Hitachi Medical Corporation | Dispositif d'imagerie par resonance magnetique |
| JP2004261591A (ja) * | 2003-02-12 | 2004-09-24 | Hitachi Medical Corp | 磁気共鳴イメージング装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2107469B (en) * | 1981-09-21 | 1985-09-18 | Peter Mansfield | Nuclear magnetic resonance methods |
| US4647858A (en) * | 1985-07-29 | 1987-03-03 | General Electric Company | Methods for overcoming transient magnetic field inhomogeneity in nuclear magnetic resonance imaging |
| US4918386A (en) * | 1988-12-23 | 1990-04-17 | General Electric Company | Method for simultaneously obtaining three-dimensional NMR angiograms and stationary tissue NMR images |
| US6181134B1 (en) * | 1998-03-09 | 2001-01-30 | The Mclean Hospital Corporation | Magnetic resonance imaging of the distribution of a marker compound without obtaining spectral information |
| DE69938713D1 (de) * | 1998-11-25 | 2008-06-26 | Koninkl Philips Electronics Nv | Verfahren und gerät der magnetischen resonanz |
| DE19859501C1 (de) * | 1998-12-22 | 2000-06-15 | Siemens Ag | Verfahren zur Erfassung von Wirbelströmen, die durch geschaltete Magnetfeldgradienten eines Kernspinresonanzgerätes verursacht werden und die Kreuzterme enthalten |
| JP3453089B2 (ja) * | 1999-08-20 | 2003-10-06 | ジーイー横河メディカルシステム株式会社 | Mri装置 |
| US6853188B2 (en) * | 1999-12-31 | 2005-02-08 | Advanced Mri Technologies, Llc | Method and apparatus for removing specific stimulated echoes in simultaneous image refocusing |
| JP3858191B2 (ja) * | 2000-10-31 | 2006-12-13 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | Mri装置 |
| US6628116B1 (en) * | 2001-09-06 | 2003-09-30 | Ge Medical Systems Global Technology Co., Llc | Process and apparatus to remove stimulated echo artifacts caused by interactions of a preparation sequence with a gradient echo sequence in MR imaging |
| JP3968352B2 (ja) * | 2004-02-03 | 2007-08-29 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | Mri装置 |
| US7800368B2 (en) * | 2006-02-17 | 2010-09-21 | Regents Of The University Of Minnesota | High field magnetic resonance |
| JP5416960B2 (ja) * | 2008-12-17 | 2014-02-12 | 株式会社東芝 | 磁気共鳴イメージング装置 |
| EP2414861B1 (en) * | 2009-03-31 | 2015-01-28 | Max-Planck-Gesellschaft zur Förderung der Wissenschaften e.V. | Magnetic resonance imaging with improved imaging contrast |
| DE102009019596B4 (de) * | 2009-04-30 | 2023-08-17 | Siemens Healthcare Gmbh | Magnetresonanzangiographie mit flusskompensierter und flusssensitiver Bildgebung |
-
2008
- 2008-12-17 JP JP2008321089A patent/JP5416960B2/ja not_active Expired - Fee Related
-
2009
- 2009-12-10 US US12/634,925 patent/US8487614B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06261877A (ja) * | 1992-10-26 | 1994-09-20 | Philips Electron Nv | 磁気共鳴画像化における渦電流補償 |
| JPH11244256A (ja) * | 1998-03-03 | 1999-09-14 | Toshiba Corp | 磁気共鳴診断装置 |
| WO2003037183A1 (fr) * | 2001-10-30 | 2003-05-08 | Hitachi Medical Corporation | Dispositif d'imagerie par resonance magnetique |
| JP2004261591A (ja) * | 2003-02-12 | 2004-09-24 | Hitachi Medical Corp | 磁気共鳴イメージング装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018523258A (ja) * | 2015-05-12 | 2018-08-16 | ティーエーイー テクノロジーズ, インコーポレイテッド | 不所望の渦電流を低減するシステムおよび方法 |
| JP2018186892A (ja) * | 2017-04-28 | 2018-11-29 | 株式会社日立製作所 | 磁気共鳴イメージング装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5416960B2 (ja) | 2014-02-12 |
| US20100148774A1 (en) | 2010-06-17 |
| US8487614B2 (en) | 2013-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5416960B2 (ja) | 磁気共鳴イメージング装置 | |
| JP5449805B2 (ja) | 磁気共鳴イメージング装置 | |
| US6842000B2 (en) | Method and device for acquiring data for diffusion-weighted magnetic resonance imaging | |
| US8253415B2 (en) | Magnetic resonance imaging apparatus and magnetic resonance imaging method | |
| US7557575B2 (en) | Magnetic resonance imaging apparatus and magnetic resonance imaging method | |
| CN102028466B (zh) | 磁共振成像装置 | |
| US8093894B2 (en) | Magnetic resonance imaging apparatus and magnetic resonance imaging method for improving uniformity in sensitivity map | |
| US8008915B2 (en) | Magnetic resonance imaging apparatus and magnetic resonance imaging method | |
| US10247798B2 (en) | Simultaneous multi-slice MRI measurement | |
| WO2013054643A1 (ja) | 磁気共鳴イメージング装置及び磁気共鳴イメージング方法 | |
| US20100272337A1 (en) | Magnetic resonance imaging apparatus | |
| JP2010172383A (ja) | 磁気共鳴イメージング装置 | |
| JP5214209B2 (ja) | 磁気共鳴イメージング装置 | |
| US10557909B2 (en) | Method and magnetic resonance tomography apparatus for diffusion imaging | |
| JP5177379B2 (ja) | 磁気共鳴イメージング装置 | |
| JP5883207B2 (ja) | 磁気共鳴イメージング装置および磁気共鳴イメージング装置の制御プログラム | |
| JP5450871B2 (ja) | 磁気共鳴イメージング装置 | |
| JP3688795B2 (ja) | 磁気共鳴イメージング装置 | |
| JPH09285457A (ja) | 磁気共鳴イメージング装置 | |
| JPWO2003037183A1 (ja) | 磁気共鳴イメージング装置 | |
| EP4462147A1 (en) | Mr imaging using cest contrast enhancement | |
| JP6697520B2 (ja) | 磁気共鳴イメージング装置 | |
| JPH11225987A (ja) | 磁気共鳴イメージング装置 | |
| Jamil | Development of a high spatial resolution functional MRI sequence at ultra-high field | |
| JP2002177239A (ja) | 磁気共鳴装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100422 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111205 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20111206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130514 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130515 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130712 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131022 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131118 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5416960 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |