JP2010200416A - モータの発熱防止制御装置 - Google Patents
モータの発熱防止制御装置 Download PDFInfo
- Publication number
- JP2010200416A JP2010200416A JP2009039901A JP2009039901A JP2010200416A JP 2010200416 A JP2010200416 A JP 2010200416A JP 2009039901 A JP2009039901 A JP 2009039901A JP 2009039901 A JP2009039901 A JP 2009039901A JP 2010200416 A JP2010200416 A JP 2010200416A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- control
- magnetic field
- rotation
- heat generation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Control Of Electric Motors In General (AREA)
Abstract
【解決手段】外力によって強制的に回転させられることによって磁界が変化するとともにその磁界の変化によって発熱するモータの発熱防止制御装置において、前記モータが他の回転部材の回転に連れて回転する連れ回りの際に、前記モータに前記発熱を低下させる磁界を発生させるように通電するモータ低損失制御手段を備えている。したがって、連れ回りが生じてもロータとステータとの間の磁界が変化したり、それに伴って温度が上昇したりしないので、モータの過熱を防止できる。
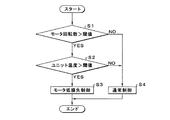
【選択図】図1
Description
Claims (1)
- 外力によって強制的に回転させられることによって磁界が変化するとともにその磁界の変化によって発熱するモータの発熱防止制御装置において、
前記モータが他の回転部材の回転に連れて回転する連れ回りの際に、前記モータに前記発熱を低下させる磁界を発生させるように通電するモータ低損失制御手段を備えていることを特徴とするモータの発熱防止制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009039901A JP5493384B2 (ja) | 2009-02-23 | 2009-02-23 | モータの発熱防止制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009039901A JP5493384B2 (ja) | 2009-02-23 | 2009-02-23 | モータの発熱防止制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010200416A true JP2010200416A (ja) | 2010-09-09 |
| JP5493384B2 JP5493384B2 (ja) | 2014-05-14 |
Family
ID=42824544
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009039901A Expired - Fee Related JP5493384B2 (ja) | 2009-02-23 | 2009-02-23 | モータの発熱防止制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5493384B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105391360A (zh) * | 2015-10-29 | 2016-03-09 | 湖南大学 | 电热约束下电动汽车的最优效率控制方法、控制器及系统 |
| JP2023077871A (ja) * | 2021-11-25 | 2023-06-06 | トヨタ自動車株式会社 | 制御装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0226340U (ja) * | 1988-08-04 | 1990-02-21 | ||
| JPH03150083A (ja) * | 1989-11-06 | 1991-06-26 | Yaskawa Electric Mfg Co Ltd | インバータの回生処理回路 |
| JPH1051904A (ja) * | 1996-07-29 | 1998-02-20 | Meidensha Corp | トランスミッション付電気自動車における電力変換器 |
| JP2000116184A (ja) * | 1998-10-01 | 2000-04-21 | Aichi Mach Ind Co Ltd | 直流モータ駆動回路 |
| JP2000188897A (ja) * | 1998-12-22 | 2000-07-04 | Sanyo Denki Co Ltd | モータ制御装置 |
| JP2005198441A (ja) * | 2004-01-08 | 2005-07-21 | Tamagawa Seiki Co Ltd | ブラシレスモータの制御方法 |
| JP2005328648A (ja) * | 2004-05-14 | 2005-11-24 | Nissan Motor Co Ltd | モーター四輪駆動車のフリクション制御装置 |
-
2009
- 2009-02-23 JP JP2009039901A patent/JP5493384B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0226340U (ja) * | 1988-08-04 | 1990-02-21 | ||
| JPH03150083A (ja) * | 1989-11-06 | 1991-06-26 | Yaskawa Electric Mfg Co Ltd | インバータの回生処理回路 |
| JPH1051904A (ja) * | 1996-07-29 | 1998-02-20 | Meidensha Corp | トランスミッション付電気自動車における電力変換器 |
| JP2000116184A (ja) * | 1998-10-01 | 2000-04-21 | Aichi Mach Ind Co Ltd | 直流モータ駆動回路 |
| JP2000188897A (ja) * | 1998-12-22 | 2000-07-04 | Sanyo Denki Co Ltd | モータ制御装置 |
| JP2005198441A (ja) * | 2004-01-08 | 2005-07-21 | Tamagawa Seiki Co Ltd | ブラシレスモータの制御方法 |
| JP2005328648A (ja) * | 2004-05-14 | 2005-11-24 | Nissan Motor Co Ltd | モーター四輪駆動車のフリクション制御装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105391360A (zh) * | 2015-10-29 | 2016-03-09 | 湖南大学 | 电热约束下电动汽车的最优效率控制方法、控制器及系统 |
| CN105391360B (zh) * | 2015-10-29 | 2017-12-08 | 湖南大学 | 电热约束下电动汽车的最优效率控制方法、控制器及系统 |
| JP2023077871A (ja) * | 2021-11-25 | 2023-06-06 | トヨタ自動車株式会社 | 制御装置 |
| JP7782224B2 (ja) | 2021-11-25 | 2025-12-09 | トヨタ自動車株式会社 | 制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5493384B2 (ja) | 2014-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3447937B2 (ja) | ハイブリッド車両 | |
| KR100877854B1 (ko) | 하이브리드 차량의 전력변환장치 비상구동방법 | |
| US20140117909A1 (en) | Driving motor for electric vehicles and control method of the same | |
| JP2009512418A (ja) | 磁石に誘因されたトルク損失を排除するために軸ロータデカプリングを備えたブラシレス永久磁石モーター/発電機 | |
| JP2017189051A (ja) | モータの制御装置 | |
| JP2008259361A (ja) | 電動車両用駆動装置 | |
| US20100122673A1 (en) | Drive unit for a fan and arrangement with a drive unit | |
| JP2006162047A (ja) | マグネット式ファンクラッチの制御方法 | |
| US20190193578A1 (en) | Electric vehicle | |
| JP4920337B2 (ja) | ハイブリッド車両のラジエータファン制御装置 | |
| JP5493384B2 (ja) | モータの発熱防止制御装置 | |
| JP2013219942A (ja) | 電気自動車 | |
| JP6597441B2 (ja) | モータの制御装置 | |
| JP5206131B2 (ja) | 冷却装置 | |
| JP6104225B2 (ja) | 回転電機の制御装置、及びその制御装置で制御される回転電機を搭載したエンジン制御システム | |
| JPH1127806A (ja) | ハイブリッド自動車の制御装置 | |
| JP5030006B2 (ja) | モータ装置 | |
| WO2020123346A2 (en) | Multi-function damper | |
| JP5604214B2 (ja) | 摩擦クラッチが組込まれた電気モータパワーユニット | |
| JP6008128B2 (ja) | インホイールモータの制御装置及びこれを備えたインホイールモータ | |
| JP2019115146A (ja) | 車両の制御装置及び車両の制御方法 | |
| JP4345593B2 (ja) | 電動機を搭載した車両の制御装置 | |
| EP3638916B1 (en) | Hybrid apparatus for controlling the rotation of a fan for cooling the cooling fluid of a vehicle | |
| JP5968699B2 (ja) | ウォータポンプ | |
| JP5164415B2 (ja) | モータ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130625 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130730 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140217 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5493384 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |