JP2010214101A - ミシンの自動糸切り装置 - Google Patents
ミシンの自動糸切り装置 Download PDFInfo
- Publication number
- JP2010214101A JP2010214101A JP2010045391A JP2010045391A JP2010214101A JP 2010214101 A JP2010214101 A JP 2010214101A JP 2010045391 A JP2010045391 A JP 2010045391A JP 2010045391 A JP2010045391 A JP 2010045391A JP 2010214101 A JP2010214101 A JP 2010214101A
- Authority
- JP
- Japan
- Prior art keywords
- cam
- driver
- sewing machine
- core shaft
- pivot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000009958 sewing Methods 0.000 title claims abstract description 34
- 230000005540 biological transmission Effects 0.000 claims abstract description 27
- 238000009966 trimming Methods 0.000 claims description 35
- 229910000831 Steel Inorganic materials 0.000 claims description 8
- 239000010959 steel Substances 0.000 claims description 8
- 238000005520 cutting process Methods 0.000 abstract description 4
- 238000010586 diagram Methods 0.000 description 4
- 240000004050 Pentaglottis sempervirens Species 0.000 description 3
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 3
- 230000001141 propulsive effect Effects 0.000 description 2
- 230000000087 stabilizing effect Effects 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images









Classifications
-
- D—TEXTILES; PAPER
- D05—SEWING; EMBROIDERING; TUFTING
- D05B—SEWING
- D05B65/00—Devices for severing the needle or lower thread
- D05B65/02—Devices for severing the needle or lower thread controlled by the sewing mechanisms
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Sewing Machines And Sewing (AREA)
Abstract
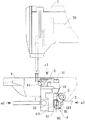
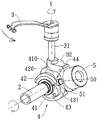
【解決手段】ミシンの自動糸切り装置は、回転シャトル台1中の伝動軸2上に、それと同期回転するカムユニット4を設置し、可動メス3はピボット31により回転シャトル台1上に可動設置され、ピボット31下方にはスイングアーム32を備える。駆動器5はスイングアーム32上に直接設置し、駆動器5の芯軸50はカムユニット4へと径方向に可動伸縮し、駆動器5の芯軸50先端とカムユニット4は接触し、カムユニット4の曲面変化を利用し芯軸50を押し、伝動軸2の軸方向において移動、偏向させる。これによりスイングアーム32とピボット31は回転し、同時に可動メス3を連動し回転させ、糸掛け、糸切り動作を行なわせる。
【選択図】図3
Description
さらに、偏向回転機構などの連棒機構により、糸切りメスの回転を連動するため、その作動を司る電磁石は、偏向圧力バネの阻害力を克服しなければならず、そうしなければ、糸切りメスが初期位置から極限位置まで回転した後に、戻って来るよう確保することはできない。糸切りメスが初期位置から極限位置まで回転した後に、戻って来るよう確保できなければ、下糸と上糸は、糸切りメスの糸調子槽中にスムーズに入れず、こうして糸切りメスは初期位置に戻った時に糸を切ることになるため、糸切り効率が悪い。
ミシンの自動糸切り装置は、回転シャトル台、伝動軸、カムユニット、可動メスを備え、
回転シャトル台上には、固定メスを固定し、
該伝動軸は、回転シャトル台中に設置し、
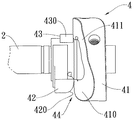
該カムユニットは、伝動軸上に設置し、該伝動軸と同期回転し、該カムユニットは、軸方向カム、位置制限カム、復位カムを備え、該軸方向カムと該位置制限カムの隣接する面には、偏向回転曲面をそれぞれ形成し、しかも2個の偏向回転曲面の間には、導引槽を形成し、該軸方向カムは、該偏向回転曲面に隣接する回転曲面を備え、該復位カムは、径方向に復位曲面を形成し、
該可動メスは、ピボットを経て、該回転シャトル台上に可動設置し、ピボット下方には、スイングアームを備え、スイングアーム上には、駆動器を設置し、該駆動器は、該カムユニットへと径方向に可動伸縮する芯軸を備え、
該可動メスが、該固定メスと相互に接続する初期位置から、糸掛かり位置まで回転すると、該駆動器は、該芯軸を、該カムユニット方向へと伸び出させ、該芯軸は該導引槽に進入し、該導引槽は、該芯軸を押し、該伝動軸の軸方向に沿って移動させ偏向させ、これにより該スイングアーム及び該ピボットは回転し、該可動メスを駆動し、初期位置から、糸掛かり位置まで回転させ、
続いて、該軸方向カムの回転曲面は、芯軸先端を、初期位置まで押し戻すため、該スイングアーム及び該ピボットは反対方向へと回転し、該可動メスを連動し、反対方向へと回転させ復位させ、該固定メスと相互に接続し糸切り操作を完成し、
該芯軸の端面は、該復位カムの復位曲面により押され、収縮し、復位し、こうして糸切りのサイクルを完成する。
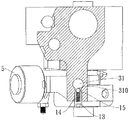
次に、図8に示すように、伝動軸2の矢印方向に沿った回転に従い、芯軸50先端のローラーは、復位カム43の譲位曲面431に沿って、導引槽44まで前進する。導引槽44は、伝動軸2の回転に従い、ローラー51に対して、伝動軸2の軸方向に沿った推進力を形成し、スイングアーム32とピボット31を押し、軸線Yを巡り回転させる。同時に、可動メス3を連動し、軸線Yを巡り回転させ、固定メス12と相互に接続する初期位置から、矢印方向に沿って、糸掛かり位置まで回転し、糸掛け準備動作を完成する(図9参照)。
続いて、伝動軸2の継続回転に従い、ローラー51が位置制限カム42を離れると、軸方向カム41の回転曲面411は反対方 向の軸方向の推進力を生じるため、芯軸50は初期位置まで押し戻される。同時に、スイングアーム32とピボット31は、軸線Yを巡り反対方向に回転し、可動メス3を連動し、反対に回転させ、糸掛けを行い、復位し、固定メス12と糸切り動作を完成する。さらに、芯軸50は、復位カム43の復位曲面430に押し動かされ、徐々に収縮し復位する(図7参照)。
Claims (7)
- 回転シャトル台、伝動軸、カムユニット、可動メスを備え、
回転シャトル台上には、固定メスを固定し、
前記伝動軸は、回転シャトル台中に設置し、
前記カムユニットは、伝動軸上に設置し、前記伝動軸と同期回転し、前記カムユニットは、軸方向カム、位 置制限カム、復位カムを備え、前記軸方向カムと前記位置制限カムの隣接する面には、偏向回転曲面をそれぞれ形成し、しかも2個の偏向回転曲面の間には、導引槽を形成し、前記軸方向カムは、前記偏向回転曲面に隣接する回転曲面を備え、前記復位カムは、径方向に復位曲面を形成し、
前記可動メスは、ピボットを経て、前記回転シャトル台上に可動設置し、ピボット下方には、スイングアームを備え、スイングアーム上には、駆動器を設置し、前記駆動器は、前記カムユニットへと径方向に可動伸縮する芯軸を備え、
前記可動メスが、前記固定メスと相互に接続する初期位置から、糸掛かり位置まで回転すると、前記駆動器は、前記芯軸を、前記カムユニット方向へと伸び出させ、前記芯軸は前記導引槽に進入し、前記導引槽は、前記芯軸を押し、前記伝動軸の軸方向に沿って移動させ偏向させ、これにより前記スイングアーム及び前記ピボットは回転し、前記可動メスを駆動し、初期位置から、糸掛かり位置まで回転させ、
前記軸方向カムの回転曲面は、芯軸先端を、初期位置まで押し戻すため、前記スイングアーム及び前記ピボットは反対方向へと回転し、前記可動メスを連動し、反対方向へと回転させ復位させ、前記固定メスと相互に接続し糸切り操作を完成し、
前記芯軸は、前記復位カムの復位曲面により押され、収縮し、復位することを特徴とするミシンの自動糸切り装置。 - 請求項1記載のミシンの自動糸切り装置において、前記復位カムは、前記導引槽と相互に連接する譲位曲面を備えることを特徴とするミシンの自動糸切り装置。
- 請求項1記載のミシンの自動糸切り装置において、前記位置制限カムは、扇型を呈することを特徴とするミシンの自動糸切り装置。
- 請求項1記載のミシンの自動糸切り装置において、前記駆動器は、電磁石であることを特徴とするミシンの自動糸切り装置。
- 請求項1記載のミシンの自動糸切り装置において、駆動器芯軸の先端には、ローラーを設置することを特徴とするミシンの自動糸切り装置。
- 請求項1記載のミシンの自動糸切り装置において、ピボット上には、開口槽を設置し、前記回転シャトル台は、前記ピボットの径方向上に開孔を設置し、開孔中には、定位ネジを螺合し、定位ネジ内には、バネを設置し、バネ先端には、スチールボールを設置し、前記スチールボールは、前記開口槽に接触して固定することを特徴とするミシンの自動糸切り装置。
- 請求項1記載のミシンの自動糸切り装置において、駆動器芯軸上には、環状の弧状槽を設置し、前記スイングアームは、駆動器芯軸の径方向に開孔を設置し、開孔内には、前記弧状槽に接触するスチールボールとバネを設置し、前記バネの外側は、定位ネジにより固定されることを特徴とするミシンの自動糸切り装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW098203848U TWM365364U (en) | 2009-03-12 | 2009-03-12 | Automatic thread-cutting device of sewing machine |
| TW098203848 | 2009-03-12 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009002982U Continuation JP3152547U (ja) | 2009-03-12 | 2009-05-08 | ミシンの自動糸切り装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010214101A true JP2010214101A (ja) | 2010-09-30 |
| JP4808277B2 JP4808277B2 (ja) | 2011-11-02 |
Family
ID=40911757
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009002982U Ceased JP3152547U (ja) | 2009-03-12 | 2009-05-08 | ミシンの自動糸切り装置 |
| JP2010045391A Expired - Fee Related JP4808277B2 (ja) | 2009-03-12 | 2010-03-02 | ミシンの自動糸切り装置 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009002982U Ceased JP3152547U (ja) | 2009-03-12 | 2009-05-08 | ミシンの自動糸切り装置 |
Country Status (6)
| Country | Link |
|---|---|
| JP (2) | JP3152547U (ja) |
| KR (1) | KR200470527Y1 (ja) |
| CZ (1) | CZ21253U1 (ja) |
| DE (1) | DE202009006737U1 (ja) |
| IT (1) | ITVE20090008U1 (ja) |
| TW (1) | TWM365364U (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114687082A (zh) * | 2020-12-31 | 2022-07-01 | 杰克科技股份有限公司 | 一种缝纫机及缝纫机剪线方法 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102009004218A1 (de) * | 2009-01-09 | 2010-07-15 | Dürkopp Adler AG | Fadenschneidvorrichtung für eine Nähmaschine |
| CN106283426B (zh) * | 2016-08-30 | 2019-04-12 | 杰克缝纫机股份有限公司 | 一种缝纫机传动机构及剪线装置 |
| CN107419448B (zh) * | 2017-06-24 | 2023-07-11 | 浙江中捷缝纫科技有限公司 | 一种缝纫机的剪线机构 |
| CN109868571B (zh) * | 2017-12-04 | 2021-03-26 | 杰克缝纫机股份有限公司 | 一种缝门襟机的裁剪装置 |
| CN108457015B (zh) * | 2018-06-28 | 2024-01-30 | 本佳安凯(湖南)缝制机械有限公司 | 一种自动缝纫机剪线机构及缝纫机 |
| CN109137288B (zh) * | 2018-10-25 | 2023-05-09 | 麻晓敏 | 一种缝纫机的剪线装置 |
| CN109267252A (zh) * | 2018-12-13 | 2019-01-25 | 杰克缝纫机股份有限公司 | 一种缝纫机上用于连续缝制的剪线装置及方法 |
| CN114000267B (zh) * | 2021-12-03 | 2025-12-30 | 琦星智能科技股份有限公司 | 包缝机中剪线和抬压脚的驱动机构 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6171082U (ja) * | 1984-10-16 | 1986-05-15 | ||
| JPH09299662A (ja) * | 1996-05-14 | 1997-11-25 | Aisin Seiki Co Ltd | ミシンの糸切断装置 |
| JP2000317178A (ja) * | 1999-05-07 | 2000-11-21 | Juki Corp | 糸切り駆動装置 |
| JP2007289692A (ja) * | 2006-04-21 | 2007-11-08 | Duerkopp Adler Ag | ミシンのための糸引出ブレード |
| JP2007289691A (ja) * | 2006-04-21 | 2007-11-08 | Duerkopp Adler Ag | ロックステッチミシン |
| JP2008068004A (ja) * | 2006-09-15 | 2008-03-27 | Juki Corp | ミシン |
| JP2008068005A (ja) * | 2006-09-15 | 2008-03-27 | Juki Corp | ミシン |
| JP2008068001A (ja) * | 2006-09-15 | 2008-03-27 | Juki Corp | ミシン |
| JP2009011547A (ja) * | 2007-07-04 | 2009-01-22 | Juki Corp | ミシン |
-
2009
- 2009-03-12 TW TW098203848U patent/TWM365364U/zh not_active IP Right Cessation
- 2009-05-08 JP JP2009002982U patent/JP3152547U/ja not_active Ceased
- 2009-05-09 DE DE202009006737U patent/DE202009006737U1/de not_active Expired - Lifetime
- 2009-05-29 KR KR2020090006569U patent/KR200470527Y1/ko not_active Expired - Fee Related
- 2009-06-18 IT IT000008U patent/ITVE20090008U1/it unknown
- 2009-07-20 CZ CZ200921467U patent/CZ21253U1/cs not_active IP Right Cessation
-
2010
- 2010-03-02 JP JP2010045391A patent/JP4808277B2/ja not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6171082U (ja) * | 1984-10-16 | 1986-05-15 | ||
| JPH09299662A (ja) * | 1996-05-14 | 1997-11-25 | Aisin Seiki Co Ltd | ミシンの糸切断装置 |
| JP2000317178A (ja) * | 1999-05-07 | 2000-11-21 | Juki Corp | 糸切り駆動装置 |
| JP2007289692A (ja) * | 2006-04-21 | 2007-11-08 | Duerkopp Adler Ag | ミシンのための糸引出ブレード |
| JP2007289691A (ja) * | 2006-04-21 | 2007-11-08 | Duerkopp Adler Ag | ロックステッチミシン |
| JP2008068004A (ja) * | 2006-09-15 | 2008-03-27 | Juki Corp | ミシン |
| JP2008068005A (ja) * | 2006-09-15 | 2008-03-27 | Juki Corp | ミシン |
| JP2008068001A (ja) * | 2006-09-15 | 2008-03-27 | Juki Corp | ミシン |
| JP2009011547A (ja) * | 2007-07-04 | 2009-01-22 | Juki Corp | ミシン |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114687082A (zh) * | 2020-12-31 | 2022-07-01 | 杰克科技股份有限公司 | 一种缝纫机及缝纫机剪线方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4808277B2 (ja) | 2011-11-02 |
| JP3152547U (ja) | 2009-08-06 |
| DE202009006737U1 (de) | 2009-07-30 |
| ITVE20090008U1 (it) | 2010-09-13 |
| CZ21253U1 (cs) | 2010-09-13 |
| KR20100009334U (ko) | 2010-09-27 |
| KR200470527Y1 (ko) | 2013-12-20 |
| TWM365364U (en) | 2009-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4808277B2 (ja) | ミシンの自動糸切り装置 | |
| JP4723634B2 (ja) | 回転式絶縁剥離装置及び回転式絶縁剥離ヘッド | |
| TW201127513A (en) | Material feeding apparatus with gripper driving member and linkage | |
| US9108257B2 (en) | Gear shaping machine | |
| CN101845722B (zh) | 一种缝纫机的自动切线装置 | |
| CN102226465A (zh) | 卷扬装置及其双螺纹驱动机构 | |
| CN206127623U (zh) | 一种缝纫机剪线装置 | |
| ATE457381T1 (de) | Fadenziehmesser für eine nähmaschine | |
| CN103978672B (zh) | 夹持装置及环向卷绕装置 | |
| KR20030064632A (ko) | 재봉기 | |
| KR100856093B1 (ko) | 커넥터 고속 스티칭머신의 구동장치 및 이를 이용한 커넥터제작방법 | |
| JP2010111515A (ja) | テープカッター | |
| CN101591839A (zh) | 亮片供应单元的移送装置 | |
| CN205741536U (zh) | 缝纫机自动切线装置 | |
| CN105420947A (zh) | 一种缝纫机的切线机构 | |
| ATE526444T1 (de) | Doppelsteppstichnähmaschine | |
| JP2012239667A (ja) | ミシンの糸巻き装置 | |
| KR20100103355A (ko) | 재봉틀의 자동 실 절단장치 | |
| JP2018075642A (ja) | 管体内下地処理装置 | |
| TWI586865B (zh) | 縫紉機自動切線裝置 | |
| CN208183272U (zh) | 剪线装置及缝纫机 | |
| CN203939888U (zh) | 加工机械的控制握把离合机构 | |
| JP3165151U (ja) | ミシン用針保護片の駆動機構 | |
| JP2011148012A (ja) | ドリル・タップ加工装置 | |
| JP2006262737A (ja) | 自動魚釣り器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110217 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110509 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110712 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110714 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110722 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110816 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140826 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |