JP2012194105A - センサ誤差較正システム - Google Patents
センサ誤差較正システム Download PDFInfo
- Publication number
- JP2012194105A JP2012194105A JP2011059257A JP2011059257A JP2012194105A JP 2012194105 A JP2012194105 A JP 2012194105A JP 2011059257 A JP2011059257 A JP 2011059257A JP 2011059257 A JP2011059257 A JP 2011059257A JP 2012194105 A JP2012194105 A JP 2012194105A
- Authority
- JP
- Japan
- Prior art keywords
- observation
- sensor
- information
- error
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
【解決手段】基準位置情報に基づいて観測空間の位置を算出し、センサ3を制御するセンサ制御手段8と、基準目標1の観測位置情報および基準位置情報に基づいて観測誤差・誤差補正値を算出する観測誤差算出手段10と、基準位置情報に基づく飛翔経路情報・観測環境情報を含む観測条件、観測空間の位置および誤差補正値を関連付けて蓄積する情報蓄積器12と、観測目標の飛翔経路情報・観測環境情報を含む観測条件および当該観測位置情報に基づく観測空間の位置に基づいて、情報蓄積器12から誤差補正値を抽出する観測誤差補正値最適化手段16と、抽出された誤差補正値を用いて、センサ3により観測された観測目標の位置を補正する観測誤差補正手段17とを備えた。
【選択図】図2
Description
実施の形態1.
図1はこの発明の実施の形態1に係るセンサ誤差較正システムが適用されたセンサネットワークシステムの構成を示す図である。
センサネットワークシステムは、図1に示すように、基準目標1、地上局2、センサ(♯1〜♯N)3および中央装置4から構成されている。
地上局2は、基準目標1から基準位置情報を受信し、中央装置4に送信するものである。
図2はこの発明の実施形態1による中央装置4を示す機能構成図である。
中央装置4は、図2に示すように、操作器5、基準位置入力手段6、観測計画作成手段(観測環境取得手段)7、センサ制御手段8、観測位置入力手段9、観測誤差算出手段10、情報管理手段11、情報蓄積器12、情報出力手段13、表示器14、情報解析評価手段15、観測誤差補正値最適化手段16、観測誤差補正手段17および観測位置出力手段18から構成されている。なおセンサ誤差較正システムは、中央装置4の操作器5および表示器14を除いた各機能部から構成されている。
情報蓄積器12は、情報管理手段11を介して取得した各種情報を蓄積するものである。
表示器14は、情報出力手段13から取得した情報を表示するものである。
情報解析評価手段15は、操作器5から取得した情報解析評価条件に基づいて、情報蓄積器12から該当する情報を抽出し、観測誤差の解析・評価を行うものである。
観測位置出力手段18は、観測誤差補正手段17から取得した観測位置情報を情報出力手段13に出力するものである。
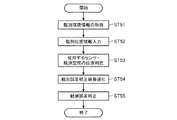
まず、観測誤差測定計画を作成する際の中央装置4による動作を図3のフローチャートを参照しながら説明する。
中央装置4による観測誤差測定計画作成動作では、図3に示すように、まず、観測計画作成手段7は、操作器5を介して、ユーザにより入力された計画条件を取得する(ステップST31)。すなわち、ユーザは、センサ3の観測誤差を測定する際に対象・対象外とするセンサ3および観測誤差測定対象のセンサ3が基準目標1を観測する期間等の情報を計画条件として入力し、観測計画作成手段7はこの計画条件を取得する。これにより、例えば「○月○日○時から△月△日△時の間にセンサ♯□もしくはセンサ♯■を使用して観測誤差を測定したい」等という計画条件を取得することができる。
次いで、観測計画作成手段7は、基準位置入力手段6を介して、地上局2から基準位置情報を受信する(ステップST33)。なお、基準目標1が移動する場合には、基準位置入力手段6で基準位置情報に基づいて基準目標1の予測軌道を算出し、観測計画作成手段7はこの予測軌道情報を取得するようにしてもよい。
中央装置4による観測誤差・誤差補正値算出動作では、図4に示すように、まず、基準位置入力手段6は、地上局2から基準位置情報を受信する(ステップST41)。
次いで、観測誤差算出手段10は、算出した観測誤差に基づいて、実際にセンサ3が観測目標を観測した際に使用する誤差補正値を算出する(ステップST45)。
これにより、各観測空間の位置・観測条件ごとのセンサ3の観測誤差および誤差補正値、この誤差補正値を算出する際に用いた基準目標1の基準位置情報(または予測軌道情報)および観測位置情報等の情報を蓄積させることができる。
次いで、情報出力手段13は、情報管理手段11により更新された情報を表示器14に表示させる(ステップST47)。
例えば、ユーザが解析項目として海水温と観測誤差を選択し、解析手段として2軸グラフを選択した場合には、情報蓄積器12に蓄積されている過去の観測誤差に基づいて、海水温と観測誤差を軸とするグラフを表示する。また、解析対象項目として、任意のセンサ3と観測誤差を選択し、解析手段として正規分布を選択した場合には、当該センサ3の観測誤差を正規分布として表示する。なお、表示するデータに対して、ユーザが設定する条件を基にフィルタリングすることも可能である。
なお、観測計画作成手段7は、操作器5を介して、ユーザにより入力された観測計画を予め取得する。すなわち、ユーザは、実際に観測目標を観測する際に対象とするセンサ3や、観測対象のセンサ3が観測目標を観測する期間等の情報である観測計画を入力し、観測計画作成手段7はこの観測計画を取得する。そして、センサ制御手段8は、観測計画作成手段7から取得した観測計画に基づいて、観測対象のセンサ3が観測目標を観測する際の、センサ3に対する観測空間の位置や制御タイミング等を含む制御計画を作成する。
なお、ユーザは、観測目標の飛翔経路を予測可能な場合には、この情報も操作器5を介して入力し、観測計画作成手段7はこの予測された観測目標の飛翔経路情報も取得する。
実施の形態1では、自己位置検出可能な基準目標1からの基準位置情報とセンサ3からの基準目標1の観測位置情報とに基づいて、センサ3の観測誤差を算出したが、既に同一の観測条件で観測誤差を測定したセンサ3が存在する場合には、基準目標1を用いることなく、この観測誤差測定済みのセンサ3と観測誤差測定対象のセンサ3とに、同一観測目標を同時に探知追尾させることで、観測誤差の測定を行うようにしてもよい。なお、基準位置情報の代替として使用する観測誤差測定済みのセンサ3からの観測位置情報は、誤差補正を施した位置情報とする。
次いで、観測誤差補正値最適化手段16は、観測位置入力手段9から取得した、観測誤差測定済みのセンサ3からの観測目標の観測位置情報に基づく観測空間の位置、および、観測条件(観測位置情報に基づく観測目標の飛翔経路情報または観測計画作成手段7から取得した予測された観測目標の飛翔経路情報、および、観測計画作成手段7から取得した、観測誤差測定済みのセンサ3が観測目標を観測した際の観測環境情報)に基づいて、誤差補正値を抽出する。
次いで、観測誤差補正手段17は、この誤差補正値を用いて、観測誤差測定済みのセンサ3により観測された観測目標の位置を補正する。
実施の形態1では、オンラインで入力される基準位置情報および観測位置情報を基に観測誤差の測定を行うものについて示したが、情報蓄積器12に蓄積されている基準位置情報および観測位置情報を用いて、オフラインで観測誤差の測定を行うようにしてもよい。
例えば、観測誤差測定に用いる観測位置情報を選別する際の距離閾値を変更した場合、観測誤差算出手段10は、情報蓄積器12に関連付けられて蓄積されている基準位置情報および、基準位置から、変更した距離閾値内の位置に該当する観測位置情報を基に、観測誤差および誤差補正値を再度算出する。
このように、情報蓄積器12に蓄積されている情報を用いることで、条件変更があった場合に容易に観測誤差および誤差補正値を再算出することができる。
Claims (6)
- センサにより観測された観測目標の位置を示す観測位置情報を受信する観測位置入力手段と、
前記センサの観測誤差を測定する際に当該センサが観測目標として観測する、基準目標の位置を示す基準位置情報を受信する基準位置入力手段と、
前記センサが観測している期間での観測環境情報を取得する観測環境取得手段と、
前記基準位置入力手段により受信された基準位置情報に基づいて、センサに対する観測空間の位置を算出し、当該センサの動作を制御するセンサ制御手段と、
前記観測位置入力手段により受信された、前記センサ制御手段による制御に従い動作した前記センサからの基準目標の観測位置情報、および、前記基準位置入力手段により受信された基準位置情報に基づいて、当該センサの観測誤差を算出し、誤差補正値を算出する観測誤差算出手段と、
前記基準位置入力手段により受信された基準位置情報に基づく飛翔経路情報および前記観測環境取得手段により取得された前記センサが基準目標を観測した際の観測環境情報を含む観測条件、前記センサ制御手段により算出された当該センサに対する観測空間の位置、および、前記観測誤差算出手段により算出された誤差補正値を関連付けて蓄積する情報蓄積器と、
前記観測位置入力手段により受信された観測目標の観測位置情報に基づく飛翔経路情報または予測された飛翔経路情報、および前記観測環境取得手段により取得された前記センサが観測目標を観測した際の観測環境情報を含む観測条件、および、当該観測位置情報に基づく当該センサに対する観測空間の位置に基づいて、前記情報蓄積器から誤差補正値を抽出する観測誤差補正値最適化手段と、
前記観測誤差補正値最適化手段により抽出された誤差補正値を用いて、当該センサにより観測された観測目標の位置を補正する観測誤差補正手段と
を備えたセンサ誤差較正システム。 - 前記観測誤差算出手段は、前記観測位置情報が示す基準目標の位置が、前記基準位置情報が示す基準目標の位置から予め設定した距離閾値以上離れている場合に、当該観測位置情報を観測誤差測定に用いない
ことを特徴とする請求項1記載のセンサ誤差較正システム。 - 前記観測誤差補正値最適化手段は、前記センサが観測目標を観測した際の観測条件および観測空間の位置と、前記情報蓄積器に蓄積されている誤差補正値に関連付けられた観測条件および観測空間の位置との相関評価値を算出し、当該相関評価値が最も高い誤差補正値を抽出する
ことを特徴とする請求項1または請求項2記載のセンサ誤差較正システム。 - 前記情報蓄積器は、前記観測誤差算出手段により算出された観測誤差を、対応する観測条件、観測空間の位置および誤差補正値と関連付けて蓄積し、
前記観測誤差の解析・評価を行う際に用いる解析対象および解析手段を含む情報解析評価条件を取得し、当該情報解析評価条件に基づいて、前記情報蓄積器から該当する情報を抽出し、前記観測誤差の解析・評価を行う情報解析評価手段を備えた
ことを特徴とする請求項1から請求項3のうちのいずれか1項記載のセンサ誤差較正システム。 - 前記センサ制御手段は、前記センサの観測誤差を測定する場合に同一の観測条件で観測誤差が測定されたセンサが既に存在する場合に、当該観測誤差測定済みのセンサと観測誤差測定対象のセンサに同一観測目標を観測させるように制御を行い、
前記観測誤差補正値最適化手段は、前記観測位置入力手段により受信された前記観測誤差測定済みのセンサからの観測目標の観測位置情報に基づく飛翔経路情報または予測された飛翔経路情報、および前記観測環境取得手段により取得された当該観測誤差測定済みのセンサが観測目標を観測した際の観測環境情報を含む観測条件、および、当該観測位置情報に基づく前記観測誤差測定済みのセンサに対する観測空間の位置に基づいて、前記情報蓄積器から誤差補正値を抽出し、
前記観測誤差補正手段は、前記観測誤差補正値最適化手段により抽出された誤差補正値を用いて、前記観測誤差測定済みのセンサにより観測された観測目標の位置を補正し、
前記観測誤差算出手段は、前記観測誤差補正手段により補正された観測目標の位置を示す観測位置情報、および、前記観測位置入力手段により受信された前記観測誤差測定対象のセンサからの観測目標の観測位置情報に基づいて、前記観測誤差測定対象のセンサの観測誤差を算出し、誤差補正値を算出する
ことを特徴とする請求項1から請求項4のうちのいずれか1項記載のセンサ誤差較正システム。 - 前記情報蓄積器は、前記基準位置入力手段により受信された基準位置情報および前記観測位置入力手段により受信された基準目標の観測位置情報を関連付けて蓄積し、
前記観測誤差算出手段は、前記情報蓄積器に関連付けられて蓄積されている基準位置情報および所定の観測位置情報に基づいて、観測誤差および誤差補正値を算出する
ことを特徴とする請求項1から請求項5のうちのいずれか1項記載のセンサ誤差較正システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011059257A JP5713739B2 (ja) | 2011-03-17 | 2011-03-17 | センサ誤差較正システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011059257A JP5713739B2 (ja) | 2011-03-17 | 2011-03-17 | センサ誤差較正システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012194105A true JP2012194105A (ja) | 2012-10-11 |
| JP5713739B2 JP5713739B2 (ja) | 2015-05-07 |
Family
ID=47086133
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011059257A Active JP5713739B2 (ja) | 2011-03-17 | 2011-03-17 | センサ誤差較正システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5713739B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180098094A (ko) * | 2017-02-24 | 2018-09-03 | 홍익대학교 산학협력단 | 장거리 탐지 레이다를 이용한 대기평가 시스템 및 방법 |
| CN112556722A (zh) * | 2020-11-12 | 2021-03-26 | 北京电子工程总体研究所 | 一种基于自动选取优选源的系统误差补偿方法 |
| CN112753213A (zh) * | 2020-04-26 | 2021-05-04 | 深圳市大疆创新科技有限公司 | 目标定位方法、可移动平台、存储介质 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS628078A (ja) * | 1985-07-04 | 1987-01-16 | Nec Corp | 測高レ−ダ−の高度誤差補正装置 |
| JPH02287178A (ja) * | 1989-04-27 | 1990-11-27 | Matsushita Electric Works Ltd | 車載用レーダシステム |
| JPH08271619A (ja) * | 1995-03-28 | 1996-10-18 | Oki Electric Ind Co Ltd | レーダ情報較正装置 |
| JPH1152054A (ja) * | 1997-08-01 | 1999-02-26 | Fujitsu Ten Ltd | 前方測距装置の異常検出方法 |
| JP2002286836A (ja) * | 2001-03-23 | 2002-10-03 | Mitsubishi Electric Corp | 目標観測システム |
| JP2008191071A (ja) * | 2007-02-07 | 2008-08-21 | Mitsubishi Electric Corp | レーダ装置 |
| JP2008534983A (ja) * | 2005-04-04 | 2008-08-28 | レイセオン・カンパニー | 複数のレーダをコヒーレントに組み合わせるシステム及び方法 |
| JP2010071889A (ja) * | 2008-09-19 | 2010-04-02 | Toshiba Corp | 移動体搭載レーダ装置及びキャリブレーション方法 |
-
2011
- 2011-03-17 JP JP2011059257A patent/JP5713739B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS628078A (ja) * | 1985-07-04 | 1987-01-16 | Nec Corp | 測高レ−ダ−の高度誤差補正装置 |
| JPH02287178A (ja) * | 1989-04-27 | 1990-11-27 | Matsushita Electric Works Ltd | 車載用レーダシステム |
| JPH08271619A (ja) * | 1995-03-28 | 1996-10-18 | Oki Electric Ind Co Ltd | レーダ情報較正装置 |
| JPH1152054A (ja) * | 1997-08-01 | 1999-02-26 | Fujitsu Ten Ltd | 前方測距装置の異常検出方法 |
| JP2002286836A (ja) * | 2001-03-23 | 2002-10-03 | Mitsubishi Electric Corp | 目標観測システム |
| JP2008534983A (ja) * | 2005-04-04 | 2008-08-28 | レイセオン・カンパニー | 複数のレーダをコヒーレントに組み合わせるシステム及び方法 |
| JP2008191071A (ja) * | 2007-02-07 | 2008-08-21 | Mitsubishi Electric Corp | レーダ装置 |
| JP2010071889A (ja) * | 2008-09-19 | 2010-04-02 | Toshiba Corp | 移動体搭載レーダ装置及びキャリブレーション方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180098094A (ko) * | 2017-02-24 | 2018-09-03 | 홍익대학교 산학협력단 | 장거리 탐지 레이다를 이용한 대기평가 시스템 및 방법 |
| KR101954283B1 (ko) | 2017-02-24 | 2019-03-05 | 홍익대학교 산학협력단 | 장거리 탐지 레이다를 이용한 대기평가 시스템 및 방법 |
| CN112753213A (zh) * | 2020-04-26 | 2021-05-04 | 深圳市大疆创新科技有限公司 | 目标定位方法、可移动平台、存储介质 |
| CN112556722A (zh) * | 2020-11-12 | 2021-03-26 | 北京电子工程总体研究所 | 一种基于自动选取优选源的系统误差补偿方法 |
| CN112556722B (zh) * | 2020-11-12 | 2023-07-28 | 北京电子工程总体研究所 | 一种基于自动选取优选源的系统误差补偿方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5713739B2 (ja) | 2015-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111386440B (zh) | 测距设备及其控制方法 | |
| US9574877B2 (en) | Barometric altimeter for indoor use | |
| JP5203104B2 (ja) | 降水予測システム、方法及びプログラム | |
| JP4479785B2 (ja) | 位置・時刻検出装置および時計 | |
| CN107066831B (zh) | 一种区域综合环境评价方法、装置及系统 | |
| GB2499112A (en) | Method and device for determining altitude | |
| JP5713739B2 (ja) | センサ誤差較正システム | |
| CN106595578B (zh) | 一种基于多传感器信息融合的无人机高度测量方法及系统 | |
| WO2014189495A1 (en) | Systems and methods for simultaneously and automatically creating databases of wifi signal information | |
| US20160348932A1 (en) | Thermal load estimating device and air conditioning control system | |
| EP2377110A1 (en) | Method and apparatus for calibrating a fall detector | |
| JP2019095323A (ja) | 気象予測装置 | |
| US10573196B2 (en) | Systems and methods for simulating wind noise models | |
| TW201915510A (zh) | 在電磁位置追蹤系統中校正場變形 | |
| CN117570980A (zh) | 一种基于uwb与gps融合定位算法的方法及系统 | |
| Zhang et al. | Influence of clock jump on the velocity and acceleration estimation with a single GPS receiver based on carrier-phase-derived Doppler | |
| US10502560B2 (en) | Optoelectronic measuring device having magnetic compass and compensation functionality | |
| CN108732648B (zh) | 一种面向山地暴雨预报的渐进决策方法 | |
| US20070257839A1 (en) | System and method to perform network node localization training using a mobile node | |
| KR101180825B1 (ko) | 센서 네트워크 기반의 이동체 위치 추적 장치 및 방법 | |
| CN121454580A (zh) | 一种基于rtk与惯性测量耦合的输电导线三维姿态估计方法、系统、设备及介质 | |
| KR102040190B1 (ko) | 클러스터 설계 시뮬레이션 시스템, 방법 및 컴퓨터 판독 가능한 기록매체 | |
| KR101214586B1 (ko) | 수치지도 제작을 위한 항공사진 수치도화시스템 | |
| KR101565485B1 (ko) | 위치 오차 보정 장치 및 그 방법 | |
| JP5496077B2 (ja) | 音線解析装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140724 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140812 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140930 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150310 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5713739 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |