JP2014201093A - 車両用操舵装置 - Google Patents
車両用操舵装置 Download PDFInfo
- Publication number
- JP2014201093A JP2014201093A JP2013076380A JP2013076380A JP2014201093A JP 2014201093 A JP2014201093 A JP 2014201093A JP 2013076380 A JP2013076380 A JP 2013076380A JP 2013076380 A JP2013076380 A JP 2013076380A JP 2014201093 A JP2014201093 A JP 2014201093A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- angle
- vehicle body
- steering wheel
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/04—Hand wheels
- B62D1/043—Hand wheels with a device allowing single-hand operation of the steering wheel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/001—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/07568—Steering arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
- B66F9/24—Electrical devices or systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20256—Steering and controls assemblies
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Structural Engineering (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Steering Controls (AREA)
- Power Steering Mechanism (AREA)
- Forklifts And Lifting Vehicles (AREA)
Abstract
Description
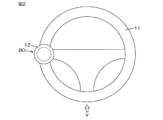
図10Aがステアリングホイール200の中立位置とする。たとえば、図10Bに示すように、ステアリングホイール200の回転角度位置が、運転手から見てノブ201がステアリングホイール200の中心の右横に位置するような回転角度位置である場合には、ノブ201によってステアリングホイール200を意図通りに操作させることが難しかった。したがって、このような場合には、フォーク部の向き(車体の向き)を微調整することが難しかった。
請求項3記載の発明は、前記操作部材が前記一方の方向に操作されたことが前記第1検出手段によって検出されたときに、車体を左方向に微操舵させる手段(51)と、前記操作部材が前記他方の方向に操作されたことが前記第2入力手段によって検出されたときに、車体を右方向に微操舵させる手段(51)とを含む、請求項2に記載の車両用操舵装置である。
図1は、この発明の一実施形態に係る車両用操舵装置が適用された荷役車両としてのフォークリフトの概略構成を模式的に示す側面図である。
フォークリフト1は、車体2と、車体2の前部に設けられた荷役装置3と、車体2を支持する駆動輪としての前輪4と、車体2を支持する転舵輪としての後輪5と、後輪5を転舵するための車両用操舵装置6とを含んでいる。
車両用操舵装置6は、操舵部材としてのステアリングホイール11と転舵輪としての後輪5の転舵角を変化させるための舵取り機構との間の機械的な連結が断たれた、いわゆるステア・バイ・ワイヤシステムである。ステアリングホイール11には、ステアリングホイール11を操作するためのレバー(操作部)12が設けられている。
ステアリングホイール11は、車体に回転可能に支持された回転シャフト21の上端部に連結されている。レバー12は、支持機構80によって、ステアリングホイール11の操作状態(回転角度位置)にかかわらず、ステアリングホイール11に対して車体を基準とした左方向および右方向に傾動可能(移動可能)に、ステアリングホイール11に支持されている。
支持機構80は、ステアリングホイール11に固定された支持部材81と、支持部材81上に配置され、支持部材81に回転自在に支持された台座82と、台座82をステアリングホイール11の回転に伴って回転させるための歯車機構83とを備えている。
歯車機構83は、第1歯車83a、第2歯車83b、第3歯車83c、第4歯車83dおよびギヤケース83eを備えている。
第1歯車83aは、ギャケース83e内において、台座82のシャフト82aの下端部に、シャフト82aと一体回転可能に固定されている。第2歯車83bおよび第3歯車83cは、回転軸83fと一体回転可能に回転軸83fに固定されている。第2歯車83bは、第1歯車83aと噛み合っている。第3歯車83cは、第2歯車83bの下側に配置されている。第3歯車83cにおける回転シャフト21に対向する部分は、ギヤケース83eから突出している。
この車両用操舵装置6では、ステアリングホイール11の回転操作およびレバー12の操作に応じて駆動される転舵用モータ14のロータの回転運動を転舵軸16の直線運動(車両左右方向の直線運動)に変換し、この転舵軸16の直線運動を後輪5の転舵運動に変換することにより、転舵が達成される。
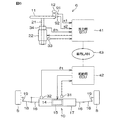
図7は、転舵用ECU42の電気的構成を示すブロック図である。
転舵用ECU42は、マイクロコンピュータ51と、マイクロコンピュータ51によって制御され、転舵用モータ14に電力を供給する駆動回路(インバータ回路)52と、転舵用モータ14に流れるモータ電流を検出する電流検出部53とを備えている。
目標転舵角設定部61は、操舵角センサ34によって検出される操舵角θhと、第1検出器91の出力信号s1と、第2検出器92の出力信号s2とに基づいて、目標転舵角θt*を設定する。目標転舵角設定部61の動作の詳細については、後述する。目標転舵角設定部61によって設定された目標転舵角θt*は、角度偏差演算部62に与えられる。
電流指令値生成部64は、PI制御部63の演算結果に基づいて、dq座標系の座標軸に流すべき電流値を電流指令値として生成する。具体的には、電流指令値生成部64は、d軸電流指令値Id *およびq軸電流指令値Iq *(以下、これらを総称するときには「二相電流指令値Idq *」という。)を生成する。さらに具体的には、電流指令値生成部64は、q軸電流指令値Iq *を有意値とする一方で、d軸電流指令値Id *を零とする。より具体的には、電流指令値生成部64は、PI制御部63の演算結果に基づいて、q軸電流指令値Iq *を生成する。電流指令値生成部64によって生成された二相電流指令値Idq *は、電流偏差演算部65に与えられる。
UVW/dq変換部69は、電流検出部53によって検出されるUVW座標系の三相検出電流IUVW(U相電流IU、V相電流IVおよびW相電流IW)を、dq座標系の二相検出電流IdおよびIq(以下総称するときには「二相検出電流Idq」という。)に変換する。これらが電流偏差演算部65に与えられるようになっている。UVW/dq変換部69における座標変換には、回転角演算部70によって演算されたロータ角θsが用いられる。
dq/UVW変換部67は、二相電圧指令値Vdq *を三相電圧指令値VUVW *に変換する。この座標変換には、回転角演算部70によって演算されたロータ角θsが用いられる。三相電圧指令値VUVW *は、U相電圧指令値VU *、V相電圧指令値VV *およびW相電圧指令値VW *からなる。この三相電圧指令値VUVW *は、PWM制御部68に与えられる。
駆動回路52は、U相、V相およびW相に対応した三相インバータ回路からなる。このインバータ回路を構成するパワー素子がPWM制御部68から与えられるPWM制御信号によって制御されることにより、三相電圧指令値VUVW *に相当する電圧が転舵用モータ14の各相のステータ巻線101,102、103に印加されることになる。
目標転舵角設定部61は、まず、操舵角センサ34によって検出される検出操舵角θhを取得する(ステップS1)。
次に、目標転舵角設定部61は、第1検出器91の出力信号s1に基づいてレバー12が左方向に操作(傾動)されたか否かを判別する(ステップS2)。レバー12が左方向に操作されていないと判別されたときには(ステップS2:NO)、目標転舵角設定部61は、第2検出器92の出力信号s2に基づいてレバー12が右方向に操作(傾動)されたか否かを判別する(ステップS3)。レバー12が右方向に操作されていないと判別されたときには(ステップS3:NO)、目標転舵角設定部61は、次式(1)に基づいて、制御用操舵角θh’を演算する(ステップS6)。
前記式(1)において、Aは、後述するステップS4またはS5で変更される変数であり、初期値は零である。
制御用操舵角θh’は、目標転舵角θt*を演算するために使用される操舵角である。制御用操舵角θh’は、Aが零である場合には操舵角センサ34によって検出される検出操舵角θhと一致するが、Aが零以外の値である場合には検出操舵角θhとは異なる値となる。制御用操舵角θh’が検出操舵角θhとは異なる値である場合に、制御用操舵角θh’に基づいて目標転舵角θt*が演算されたときには、後輪5の中立位置(θt=0)に対応する回転シャフト21(ステアリングホイール11)の回転角度位置は、回転シャフト21の基準位置とは異なる回転角度位置となる。
θt*=(α/360)×θh’ …(2)
前記式(2)において、α(>0)は予め設定された値である。αは、たとえば、35に設定される。制御用操舵角θh’が正の値のときの目標転舵角θt*は正の値に設定され、制御用操舵角θh’が負の値のときの目標転舵角θt*は負の値に設定される。そして、制御用操舵角θh’の絶対値が大きくなるにしたがって、その絶対値が線形に大きくなるように目標転舵角θt*が設定される。つまり、目標転舵角θt*は、制御用操舵角θh’に応じた値となる。
前記ステップS2において、レバー12が左方向に操作されたと判別されたときには(ステップS2:YES)、目標転舵角設定部61は、変数Aを所定値β(>0)だけ大きな値に変更する(ステップS4)。βは、たとえば、5度に設定される。そして、目標転舵角設定部61は、前記式(1)に基づいて、制御用操舵角θh’を演算する(ステップS6)。これにより、制御用操舵角θh’は、前回の制御用操舵角θh’に対してβだけ大きな値に変更される。この後、目標転舵角設定部61は、前記式(2)に基づいて、目標転舵角θt*を演算する(ステップS7)。これにより、目標転舵角θt*は、前回の目標転舵角θt*より所定値だけ大きな値に変更される。このため、後輪5は、左転舵方向に転舵される。これにより、車体2が左方向に微操舵される。そして、今演算周期での処理を終了する。
次の演算周期において、ステップS1で、検出操舵角θhが取得される。この間にステアリングホイール11が操作されていないとすると、検出操舵角θhは−180度のままとなる。レバー12が左方向に操作されたままであるとすると、ステップS2からステップ゜S4に進んで、変数Aがβだけ大きな値”10”に更新される。そして、ステップS6に進んで、制御用操舵角θh’が演算される。この場合、変数Aは10となっているため、制御用操舵角θh’は−170度となる。この後、ステップS9に進んで、目標転舵角θt*が演算される。この場合には、目標転舵角θt*は、θt*=(α/360)×(−170)となる。これにより、車体2が左方向に微操舵される。
Claims (3)
- 操向のために操作される操舵部材と、
前記操舵部材を操作するために前記操舵部材上に設けられた操作部と、
前記操舵部材の操作状態にかかわらず、前記操舵部材に対して車体を基準とした所定の2つの方向に移動可能に、前記操作部を支持する支持機構と、
前記操作部が前記2つの方向のうちの所定の一方の方向に操作されたことを検出するための第1検出手段と、
前記操作部が前記2つの方向のうちの他方の方向に操作されたことを検出するための第2検出手段とを含む、車両用操舵装置。 - 前記2つの方向が、車体を基準とした左方向と車体を基準とした右方向であり、前記所定の一方の方向が車体を基準とした左方向であり、前記他方の方向が車体を基準とした右方向である、請求項1記載の車両用操舵装置。
- 前記操作部材が前記一方の方向に操作されたことが前記第1検出手段によって検出されたときに、車体を左方向に微操舵させる手段と、
前記操作部材が前記他方の方向に操作されたことが前記第2入力手段によって検出されたときに、車体を右方向に微操舵させる手段とを含む、請求項2に記載の車両用操舵装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013076380A JP2014201093A (ja) | 2013-04-01 | 2013-04-01 | 車両用操舵装置 |
| US14/222,981 US9056625B2 (en) | 2013-04-01 | 2014-03-24 | Vehicle steering system |
| CN201410114068.2A CN104097680A (zh) | 2013-04-01 | 2014-03-25 | 车辆用操舵装置 |
| EP14161661.5A EP2786955A1 (en) | 2013-04-01 | 2014-03-26 | Vehicle steering system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013076380A JP2014201093A (ja) | 2013-04-01 | 2013-04-01 | 車両用操舵装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014201093A true JP2014201093A (ja) | 2014-10-27 |
Family
ID=50349508
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013076380A Pending JP2014201093A (ja) | 2013-04-01 | 2013-04-01 | 車両用操舵装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9056625B2 (ja) |
| EP (1) | EP2786955A1 (ja) |
| JP (1) | JP2014201093A (ja) |
| CN (1) | CN104097680A (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014201093A (ja) * | 2013-04-01 | 2014-10-27 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP7282664B2 (ja) * | 2019-12-19 | 2023-05-29 | 株式会社クボタ | 作業機 |
| US12037040B1 (en) * | 2023-03-14 | 2024-07-16 | Danny Wipf | Vehicle steering aid system and device |
| IT202300016845A1 (it) * | 2023-08-07 | 2025-02-07 | Marco Ceccarelli | Pomello sensorizzato per volante di veicoli |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06504014A (ja) * | 1990-10-19 | 1994-05-12 | サーブ オートモービル アクチボラグ | 自動車を駆動するサーボ装置の作動−制御器、集成装置および方法 |
| JP2003171094A (ja) * | 2001-12-05 | 2003-06-17 | Toyota Industries Corp | 産業車両用のハンドルノブ及び産業車両 |
| JP2006094870A (ja) * | 2005-12-27 | 2006-04-13 | Yanmar Agricult Equip Co Ltd | コンバインの操作装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4562957A (en) * | 1981-02-03 | 1986-01-07 | Nippon Soken, Inc. | Air conditioning/heating apparatus for automobiles |
| JPH04356272A (ja) * | 1991-01-16 | 1992-12-09 | Toyota Autom Loom Works Ltd | 産業車両の前後進切換装置 |
| JP2997965B2 (ja) | 1991-10-02 | 2000-01-11 | 日本輸送機株式会社 | リーチ型フォークリフトの走行操作方法 |
| JP4003283B2 (ja) | 1998-02-12 | 2007-11-07 | 三男 板垣 | 身体障害者用の自動車かじ取りハンドル操縦補助装置 |
| JP2003220955A (ja) | 2002-01-30 | 2003-08-05 | Nippon Yusoki Co Ltd | 車輌用ステアリング装置 |
| JP2004142615A (ja) | 2002-10-24 | 2004-05-20 | Denso Corp | 空調式ハンドル |
| US7142963B2 (en) * | 2003-01-17 | 2006-11-28 | General Motors Corporation | Driver control input device for drive-by-wire system |
| US7621365B2 (en) * | 2004-02-26 | 2009-11-24 | Egan Thomas F | Technique for controlling vehicle functions |
| JP2008213769A (ja) | 2007-03-07 | 2008-09-18 | Toyota Motor Corp | 車両の操作装置 |
| DE602007005617D1 (de) | 2007-05-11 | 2010-05-12 | Bt Products Ab | Verfahren und System für Lenkhilfen |
| JP5067261B2 (ja) | 2008-05-27 | 2012-11-07 | 株式会社豊田自動織機 | 操作装置 |
| JP5708976B2 (ja) | 2010-06-16 | 2015-04-30 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP2014201093A (ja) * | 2013-04-01 | 2014-10-27 | 株式会社ジェイテクト | 車両用操舵装置 |
| US9061756B2 (en) * | 2013-04-23 | 2015-06-23 | The Boeing Company | Aircraft performance monitoring system |
-
2013
- 2013-04-01 JP JP2013076380A patent/JP2014201093A/ja active Pending
-
2014
- 2014-03-24 US US14/222,981 patent/US9056625B2/en not_active Expired - Fee Related
- 2014-03-25 CN CN201410114068.2A patent/CN104097680A/zh active Pending
- 2014-03-26 EP EP14161661.5A patent/EP2786955A1/en not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06504014A (ja) * | 1990-10-19 | 1994-05-12 | サーブ オートモービル アクチボラグ | 自動車を駆動するサーボ装置の作動−制御器、集成装置および方法 |
| JP2003171094A (ja) * | 2001-12-05 | 2003-06-17 | Toyota Industries Corp | 産業車両用のハンドルノブ及び産業車両 |
| JP2006094870A (ja) * | 2005-12-27 | 2006-04-13 | Yanmar Agricult Equip Co Ltd | コンバインの操作装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2786955A1 (en) | 2014-10-08 |
| US20140290413A1 (en) | 2014-10-02 |
| US9056625B2 (en) | 2015-06-16 |
| CN104097680A (zh) | 2014-10-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6137534B2 (ja) | 車両用操舵装置 | |
| US8494715B2 (en) | Vehicle steering apparatus | |
| JP5971512B2 (ja) | 車両用操舵装置 | |
| US8855858B2 (en) | Motor control unit and vehicle steering system | |
| JP2017087772A (ja) | 車両用操舵装置 | |
| JP7087854B2 (ja) | ステアリング制御装置 | |
| JP6120074B2 (ja) | 車両用操舵装置 | |
| JP2014201093A (ja) | 車両用操舵装置 | |
| JP2013086586A (ja) | 電動パワーステアリング装置 | |
| JP2008105576A (ja) | ステアリング制御装置および方法 | |
| JP2015229385A (ja) | 電動パワーステアリング装置 | |
| CN112498468B (zh) | 转向控制装置 | |
| JP2020005388A (ja) | モータ制御方法およびモータ制御装置 | |
| JP6414678B2 (ja) | 車両用操舵装置 | |
| JP2016192882A (ja) | モータ制御装置 | |
| JP6222427B2 (ja) | 車両用操舵装置 | |
| JP2016084002A (ja) | 車両用操舵装置 | |
| JP2019156110A (ja) | 車両用操舵装置 | |
| JP6024976B2 (ja) | 操舵角センサの信頼性判定装置 | |
| JP2013244798A (ja) | 電動パワーステアリング装置 | |
| JP2013086587A (ja) | 電動パワーステアリング装置 | |
| JP2020147234A (ja) | 操舵制御装置 | |
| JP2018098841A (ja) | モータ制御装置 | |
| JP2015205623A (ja) | 車両用操舵装置 | |
| JP2017193301A (ja) | 車両用操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170216 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170316 |