以下、図面を参照して、本発明の実施の形態(以下、「本実施形態」と称する)につき詳細に説明する。なお、各図は、本発明を十分に理解できる程度に、概略的に示してあるに過ぎない。よって、本発明は、図示例のみに限定されるものではない。また、各図において、共通する構成要素や同様な構成要素については、同一の符号を付し、それらの重複する説明を省略する。
ここでは、「上」、「下」、「前」、「後」、「左」、及び、「右」の方向は、車両の向きを基準にしているものとする。なお、図面の中には、車両の下側方向から見た構成の図面がある。それらの図面では、「左」及び「右」の方向があたかも逆になっているかのように見える。しかしながら、「左」及び「右」の方向は、車両の下側方向から見た構成における方向であるため、図面に示す通りである。
≪第1実施形態≫
以下、本第1実施形態に係るアームストッパ機構160(図2参照)の構成について説明する。ここでは、本第1実施形態に係るアームストッパ機構160の特徴を分かり易く説明するために、以下の順序で、説明する。
1:鞍乗型車両及び電動パワーステアリング装置の概略構成
2:ステアリングアームと車輪(前輪)との間の概略構成
3:ステアリングアームにかかる荷重ベクトル
4−1:比較例に係るアームストッパ機構の構成
4−2:比較例に係るアームストッパ機構の主要部にかかる荷重ベクトル
5:入力荷重ベクトル及び突当荷重ベクトルと曲げ荷重ベクトルとの関係
6−1:第1実施形態に係るアームストッパ機構の構成
6−2:第1実施形態に係るアームストッパ機構の主要部にかかる荷重ベクトル
<1:鞍乗型車両及び電動パワーステアリング装置の概略構成>
まず、図1を参照して、鞍乗型車両100の概略構成を説明する。図1は、鞍乗型車両100の概略構成を示す模式図である。鞍乗型車両100は、本第1実施形態に係るアームストッパ機構160が設けられている電動パワーステアリング装置101を搭載する車両である。
図1に示すように、鞍乗型車両100は、バギー車やスノーモービル等のATV(All Terrain Vehicle;全地形対応車)として用いられる車両であり、操舵システム1001を有している。操舵システム1001は、バーハンドル2と、ハンドルステー3と、操舵軸4と、左右のタイロッド8と、左右の車輪(前輪)9と、電動パワーステアリング装置(ステアリング装置)101と、を備えている。
操舵システム1001においては、舵取用のハンドルであるバーハンドル2が設けられるハンドルステー3が、操舵軸4に固定されている。操舵軸4は、車体側の支持部材(不図示)に回転可能に支持されている。そして、操舵軸4と、左右の車輪(前輪)9に連結される左右のタイロッド8との間に、電動パワーステアリング装置101が介装されている。電動パワーステアリング装置101は、運転者がバーハンドル2に加える操舵力を電動モータ24の発生トルクによりアシストする装置である。
電動パワーステアリング装置101は、本第1実施形態に係るアームストッパ機構160(図2参照)を備えている。アームストッパ機構160は、ステアリングアーム161とストッパ162と、を備え、ストッパ162でステアリングアーム161の回動角度を規制する機構である。
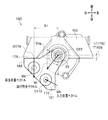
次に、図2及び図3を参照して、電動パワーステアリング装置101の概略構成を説明する。図2は、側面方向から見た、本第1実施形態に係るアームストッパ機構160が設けられた電動パワーステアリング装置101の概略構成図である。図3は、電動パワーステアリング装置101の内部の概略構成図である。
図2に示すように、電動パワーステアリング装置101は、入力軸21やトーションバー27(図3参照)、出力軸22、軸受31,32A,32B(図3参照)等の部材を内蔵している。入力軸21、トーションバー27及び出力軸22は、同一の中心軸CL(図3参照)上に配置されている。入力軸21は、ジョイント5を介してハンドル側の操舵軸4に連結されている。トーションバー27(図3参照)は、入力軸21と出力軸22とを連結している。入力軸21は、軸受31によって回動自在に支持されている。出力軸22は、軸受32A,32Bによって回動自在に支持されている。電動パワーステアリング装置101のハウジング113は、上から順に第1ハウジング113aと第2ハウジング113bと第3ハウジング113cとによって構成されている。軸受31は、第1ハウジング113aの中に嵌め込まれている。軸受32Aは、第2ハウジング113bの中に嵌め込まれている。軸受32Bは、第3ハウジング113cの中に嵌め込まれている。出力軸22の下端付近には、ステアリングアーム161が取り付けられている。
ステアリングアーム161は、車輪(前輪)9側の操舵部材である。ステアリングアーム161には、車輪9が連結されるタイロッド8が取り付けられている。タイロッド8は、車両の幅方向に延在して配置されており、その一端が車両の幅方向の中央付近でステアリングアーム161に連結され、他端が車輪(前輪)9に連結されている。ステアリングアーム161は、出力軸22にスプライン嵌合されており、出力軸22を中心にして回動する構成になっている。
電動パワーステアリング装置101は、運転者がバーハンドル2を右周り方向又は左周り方向の最大転舵角度以上に回動させようとした場合や、悪路走行時に、路面の突起物(凸部)等により、車輪(前輪)9を通して外力が入力されることによってバーハンドル2が最大転舵角度以上に回動しようとする場合に、車両が横転しないように、バーハンドル2の回動を規制する必要がある。電動パワーステアリング装置101は、そのための機構として、前記したアームストッパ機構160を備えている。
ストッパ162は、電動パワーステアリング装置101のハウジング113(第3ハウジング113c)の下面側から下方向に突出すると共に出力軸22の周囲に設けられている。アームストッパ機構160は、運転者がバーハンドル2を右周り方向又は左周り方向の最大転舵角度以上に回動させようとする場合や車輪(前輪)9を通して外力が入力されることによってバーハンドル2が最大転舵角度以上に回動しようとする場合に、ステアリングアーム161に設けられた突当面176(図8(a)参照)がストッパ162の当接面186a(図9(a)参照)に突き当たる。これにより、アームストッパ機構160は、ストッパ162でステアリングアーム161の回動角度を規制し、これに伴って、バーハンドル2の回動を規制する。
<2:ステアリングアームと車輪(前輪)との間の概略構成>
次に、図4を参照して、ステアリングアーム161と車輪(前輪)9との間の概略構成を説明する。図4は、上面方向から見た、第1実施形態に係るアームストッパ機構160のステアリングアーム161と車輪(前輪)9との間の概略構成図である。
図4に示すように、車輪(前輪)9は、前輪懸架装置501によって車体500に懸架されている。前輪懸架装置501は、車体フレーム500に上端が連結され下方へ延びるフロントクッション507と、フロントクッション507の下部から下方へ延びるナックル支持部材502と、車幅方向に延びナックル支持部材502の下部を車体フレーム500に連結するロアアーム503と、ナックル支持部材502にキングピン軸線504廻りに回転自在に取付けられ車輪(前輪)9を支えるナックル505と、車幅方向に延びナックル505をキングピン軸線504廻りに回転させるタイロッド8とからなる。ナックル505には、ドライブシャフト506を通す孔が設けられている。ドライブシャフト506は、車軸510廻りに車輪(前輪)9を回転駆動する。
次に、図5を参照して、ステアリングアーム161と車輪(前輪)9との動作関係を説明する。図5は、下面方向から見た、第1実施形態に係るアームストッパ機構160のステアリングアーム161と車輪(前輪)9との動作関係を模式的に示す説明図である。
図5(a)は、バーハンドル2を回動させていない場合(すなわち、バーハンドル2を中立状態に維持して、鞍乗型車両100を直進させている場合)の状態を示している。一方、図5(b)は、バーハンドル2を左周り方向に最大転舵角度分だけ回動させた場合(すなわち、鞍乗型車両100を最大左旋回させた場合)の状態を示している。
図5(a)と図5(b)との違いから明らかなように、バーハンドル2を左周り方向に最大転舵角度分だけ回動させた場合(図5(b)参照)に、ステアリングアーム161は、出力軸22を中心にして左周り方向に回動する。このとき、右側のタイロッド8が右側の車輪(前輪)9を左方向に押し、左側のタイロッド8が左側の車輪(前輪)9を左方向に引っ張る。その結果、2つの車輪(前輪)9が左方向に向く。また、このとき、ステアリングアーム161の右側の突当部176がストッパ162の右側の当接部186と衝突する(図7及び図11参照)。
なお、仮に、バーハンドル2を右周り方向に最大転舵角度分だけ回動させた場合に、ステアリングアーム161は、出力軸22を中心にして右周り方向に回動する。このとき、右側のタイロッド8が右側の車輪(前輪)9を右方向に押し、左側のタイロッド8が左側の車輪(前輪)9を右方向に引っ張る。その結果、2つの車輪(前輪)9が右方向に向く。また、このとき、ステアリングアーム161の左側の突当部176がストッパ162の左側の当接部186と衝突する。
<3:ステアリングアームにかかる荷重ベクトル>
鞍乗型車両100は、ステアリングアーム161の突当部176がストッパ162の当接部186と衝突している状態(図5(b)参照)で、入力荷重が外部からステアリングアーム161に入力されることがある(図6参照)。
仮に、鞍乗型車両100は、本第1実施形態に係るアームストッパ機構160が設けられた電動パワーステアリング装置101ではなく、例えば、後記する比較例に係るアームストッパ機構60が設けられた電動パワーステアリング装置1(図16及び図17参照)を搭載している場合に、比較例に係るアームストッパ機構60が出力軸22にかかる曲げ荷重ベクトルWtの値を抑制することを考慮した構成になっていない(後記する<5:入力荷重ベクトル及び突当荷重ベクトルと曲げ荷重ベクトルとの関係>の章参照)ため、比較的大きな曲げ荷重が出力軸22にかかることがある。その結果、この場合に、出力軸22を支持している軸受32A,32B(図3参照)や、トーションバー27を介して出力軸22に連結されている入力軸21を支持している軸受31(図3参照)、それらの周囲のハウジング113(図3参照)に過大な負荷がかかる可能性がある。
以下、図6を参照して、ステアリングアーム161にかかる荷重ベクトルについて説明する。図6は、ステアリングアーム161にかかる荷重ベクトルの説明図である。図6は、鞍乗型車両100の以下のような状態を示している。
すなわち、鞍乗型車両100は、悪路を走行することにより、激しく上下動する場合があり、場合によっては、車輪(前輪)9が路面から跳ね上がる(離れる)ときがある。そして、車輪(前輪)9が路面から跳ね上がる直前又は跳ね上がった直後のタイミングで、例えば、図6に示すように、運転者がバーハンドル2を左周り方向に最大転舵角度分だけ回動させると、左右の車輪(前輪)9は、側面方向から着地する。このとき、例えば、左側の車輪(前輪)9の側面の後方が岩等の硬い突起物511に衝突すると、左側の車輪(前輪)9が突起物511から強い反力を受ける。図6は、このときの鞍乗型車両100の状態を示している。
このとき、強い反力は、左側の車輪(前輪)9及び左側のタイロッド8を介して、入力荷重ベクトルWhとして、ステアリングアーム161の左側のタイロッド用孔172(図7及び図8(a)参照)に入力される。
また、このとき、ステアリングアーム161の右側の突当部176がストッパ162の右側の当接部186と衝突しているため、右側の当接部186に対して垂直な方向の突当荷重ベクトルWbが右側の当接部186から右側の突当部176に入力される。
なお、ステアリングアーム161の突当部176がストッパ162の当接部186と衝突していない状態において、車輪(前輪)9が突起物511と衝突することにより、ステアリングアーム161の突当部176がストッパ162の当接部186と衝突する場合も、ステアリングアーム161にかかる荷重ベクトルは、図6に示す状態と同様である。
また、車輪(前輪)9が路面から跳ね上がる直前又は跳ね上がった直後のタイミングで、運転者がバーハンドル2を右周り方向に最大転舵角度分だけ回動させたときは、入力荷重ベクトルWh及び突当荷重ベクトルWbが、図6に示す状態に対して、左右で逆の状態になる。すなわち、入力荷重ベクトルWhがステアリングアーム161の右側のタイロッド用孔172(図7及び図8(a)参照)に入力され、一方、突当荷重ベクトルWbが左側の当接部186から左側の突当部176に入力される。
<4−1:比較例に係るアームストッパ機構の構成>
次に、本第1実施形態に係るアームストッパ機構160の特徴を分かり易く説明するために、図16〜図19を参照して、比較例に係るアームストッパ機構60の構成を説明する。図16は、側面方向から見た、比較例に係るアームストッパ機構60が設けられた電動パワーステアリング装置1の概略構成図である。図17は、下面方向から見たアームストッパ機構60の概略構成図である。図18は、下面方向から見たアームストッパ機構60のステアリングアーム61の概略構成図である。図19は、下面方向から見たアームストッパ機構60のストッパ62の概略構成図である。
図16に示す比較例に係る電動パワーステアリング装置1は、本第1実施形態に係る電動パワーステアリング装置101と同様の装置であり、本第1実施形態に係るアームストッパ機構160の代わりに、比較例に係るアームストッパ機構60がハウジング13の下面側に設けられている。
図17は、下面方向から見た、アームストッパ機構60の構成を示している。図17に示すように、アームストッパ機構60は、出力軸22を中心にして回動するステアリングアーム61を備えている。
図17に示す例では、アームストッパ機構60は、ステアリングアーム61に設けられた突当面76a,76b(図18参照)同士のなす角度θarが、180°に設定されている。また、ストッパ62に設けられた当接面86a,86b(図19参照)同士のなす角度(2つの当接面86a,86bの間の角度であって、ストッパ62の内部に形成される角度)θstが、90°に設定されている。また、ステアリングアーム61の右周り方向の最大転舵角度及び左周り方向の最大転舵角度の合計角度θdrが、90°(すなわち、右周り方向の最大転舵角度が45°で、かつ、左周り方向の最大転舵角度が45°)に設定されている。
図18は、ステアリングアーム61の具体的な構成を示している。図18(a)は、ステアリングアーム61の各部位の構成を示しており、図18(b)は、ステアリングアーム61の各部位の配置位置を示している。
ステアリングアーム61のタイロッド8が取り付けられる部位(以下、「本体」と称する)は、図16に示すように、全体が板状に形成されている。
そして、図18に示すように、ステアリングアーム61は、1つの出力軸用孔71と2つのタイロッド用孔72a,72bとが設けられている。出力軸用孔71は、出力軸22が嵌め込まれる円形孔である。タイロッド用孔72a,72bは、タイロッド8が取り付けられる円形孔である。以下、タイロッド用孔72a,72bを総称する場合に「タイロッド用孔72」と称する。
出力軸用孔71は、その内部に出力軸22が嵌め込まれることによって、その中心点が出力軸22の中心点O22と一致した状態になる。以下、出力軸用孔71の中心点を「中心点O22」と称する場合がある。
タイロッド用孔72a,72bは、ステアリングアーム61の中心線L61の左右の均等な位置に配置されている。図18に示す例では、タイロッド用孔72a,72bは、それぞれの中心点O72が、出力軸用孔71の中心点O22から後方側に距離T72の位置で、かつ、ステアリングアーム61の中心線L61から左右に距離H72の位置に配置されている。
なお、ここでは、「ステアリングアーム61の中心線L61」が出力軸用孔71の中心点O22の上を通って前後方向に延伸する仮想上の直線であるものとして説明する。「ステアリングアーム61の中心線L61」は、バーハンドル2の転舵角度が中立状態の0°になっている場合に、後記する「ストッパ62の中心線L62(図19参照)」と一致した状態になる。その「ストッパ62の中心線L62」は、車両の幅方向の中心点を通って車両の前後方向に延伸する仮想上の直線(以下、「車両全体の中心線」と称する)でもある。
ステアリングアーム61は、ストッパ62に突き当たる部位(以下、「突当部」と称する)74a,74bを備えている。突当部74a,74bは、板状に形成されたステアリングアーム61の本体(タイロッド8が取り付けられる部位)の、出力軸用孔71の両横付近に設けられている。突当部74a,74bは、その端面がストッパ62に突き当てられる平坦面(以下、「突当面」と称する)76a,76bとして形成されている。以下、突当部74a,74bを総称する場合に「突当部74」と称する。また、突当面76a,76bを総称する場合に「突当面76」と称する。
ステアリングアーム61において、ステアリングアーム61の中心線L61と突当面76とのなす角度θ76が90°に設定されている。したがって、突当面76a及び突当面76bは、互いのなす角度(2つの突当面76a,76bの間の角度であって、ステアリングアーム61の内部に形成される角度)θarが180°に設定されている。
なお、図18中、線L76aは、突当面76aに沿って仮想的に配置した直線を示している。また、線L76bは、突当面76bに沿って仮想的に配置した直線を示している。線L76a及び線L76bは、出力軸用孔71の中心点O22で交差する。また、長さH76は、ステアリングアーム61の出力軸用孔71の中心点O22から突当面76の端部までの距離を示している。
ステアリングアーム61は、出力軸用孔71を円弧状に囲む円弧部78を備えている。円弧部78は、突当部74a,74bに連続するように形成されている。なお、図18中、長さH78は、ステアリングアーム61の出力軸用孔71の中心点O22から円弧部78の端部までの距離を示している。
図19は、ストッパ62の具体的な構成を示している。図19(a)は、ストッパ62の各部位の構成を示しており、図19(b)は、ストッパ62の各部位の配置位置を示している。
ストッパ62は、図16に示すように、電動パワーステアリング装置1のハウジング13の下面側から下方向に突出するように設けられている。そのストッパ62は、図19に示すように、下側から見た形状が、ストッパ62の中心線L62の左右で均等になるように、出力軸22の中心点O22を頂点とし、底辺の幅をH62とし、斜辺の幅を(H81+H86)とする二等辺三角形に対し、半径H81の扇形の切欠部81(図19(a)参照)がその二等辺三角形の頂点部分に形成された形状になっている。
なお、ここでは、「ストッパ62の中心線L62」が出力軸22の中心点O22の上を通って前後方向に延伸する仮想上の直線であるものとして説明する。「ストッパ62の中心線L62」は、車両全体の中心線でもある。
ストッパ62は、二等辺三角形の斜辺部分に位置する2つの平坦面86a,86bを備えており、その平坦面86a,86bがステアリングアーム61の突当面76a,76bと当接する当接面として機能する。以下、平坦面86aを「当接面86a」と称し、平坦面86bを「当接面86b」と称する。また、当接面86a,86bを総称する場合に「当接面86」と称する。
ストッパ62において、ストッパ62の中心線L62と当接面86とのなす角度θ86が45°に設定されている。したがって、当接面86a及び当接面86bは、互いのなす角度(2つの当接面86a,86bの間の角度であって、ストッパ62の内部に形成される角度)θstが90°に設定されている。
なお、図19中、線L86aは、当接面86aに沿って仮想的に配置した直線を示している。また、線L86bは、当接面86bに沿って仮想的に配置した直線を示している。線L86a及び線L86bは、出力軸22の中心点O22で交差する。
<4−2:比較例に係るアームストッパ機構の主要部にかかる荷重ベクトル>
次に、図20を参照して、比較例に係るアームストッパ機構60の主要部にかかる荷重ベクトルについて説明する。図20は、アームストッパ機構60の主要部にかかる荷重ベクトルの説明図である。
ここでは、タイロッド用孔72からステアリングアーム61に入力される車輪9(図16参照)側からの荷重ベクトルを「入力荷重ベクトルWh」とし、ストッパ62の当接面86からステアリングアーム61の突当面76にかかる荷重ベクトルを「突当荷重ベクトルWb」とし、出力軸用孔71(図18(a)参照)に嵌め込まれた出力軸22にかかる荷重ベクトルを「曲げ荷重ベクトルWt」として説明する。
また、ここでは、ステアリングアーム61の突当面76とストッパ62の当接面86とが当接する部位の中心位置を「突当中心位置O76」とし、突当荷重ベクトルWbがその突当中心位置O76にかかるものとして説明する。なお、図20に示す例では、突当中心位置O76は、出力軸22の中心点O22から距離Rの位置に設定されている。
また、ここでは、鞍乗型車両100の走行中に、鞍乗型車両100を最大左旋回させるために、バーハンドル2を左周り方向に最大転舵角度分だけ回動させた結果、図20に示すように、ステアリングアーム61の右側の突当面76がストッパ62の右側の当接面86に突き当たっている場合で、かつ、左側の車輪(前輪)9の側面の後方が突起物511(図6参照)に衝突するときを想定して説明する。この場合に、<3:ステアリングアームにかかる荷重ベクトル>の章で説明した原理によって、図20に示すように、アームストッパ機構60は、入力荷重ベクトルWhが左側のタイロッド用孔72の周囲にかかり、突当荷重ベクトルWbが突当中心位置O76にかかる。また、入力荷重ベクトルWhと突当荷重ベクトルWbとの合成ベクトルである曲げ荷重ベクトルWtが出力軸22にかかる。
曲げ荷重ベクトルWtの値が大きくなると、出力軸22を支持している軸受32A,32B(図3参照)や、トーションバー27を介して出力軸22に連結されている入力軸21を支持している軸受31(図3参照)、それらの周囲のハウジング113(図3参照)に過大な負荷がかかる可能性がある。また、出力軸22は、トーションバー27や入力軸21、操舵軸4を介してバーハンドル2に連結されている。そのため、曲げ荷重ベクトルWtの値が大きくなると、曲げ荷重が強い反力としてバーハンドル2に伝播し、その結果、操縦がし難くなる。
係る構成において、曲げ荷重ベクトルWtの値は、入力荷重ベクトルWhと突当荷重ベクトルWbとを合成した合成ベクトルの値となる。なお、入力荷重ベクトルWhの方向は、ステアリングアーム61の突当面76とストッパ62の当接面86とが当接している場合において、タイロッド用孔72に取り付けられたタイロッド8(図16参照)の取付方向によって定まる。また、突当荷重ベクトルWbの方向は、ステアリングアーム61の突当面76に対して垂直な方向となる。
<5:入力荷重ベクトル及び突当荷重ベクトルと曲げ荷重ベクトルとの関係>
次に、図20及び図21を参照して、入力荷重ベクトルWh及び突当荷重ベクトルWbと曲げ荷重ベクトルWtとの関係について説明する。図21は、入力荷重ベクトルWh及び突当荷重ベクトルWbと曲げ荷重ベクトルWtとの関係を示す模式図であって、図21(a)は図20の比較例の模式図であり、図21(b)及び図21(c)はその他の検討例の模式図である。ここでは、図20に示すように、ステアリングアーム61の右側の突当面76がストッパ62の右側の当接面86に突き当たっている場合を想定して説明する。
図21は、図20に示すように、ステアリングアーム61の右側の突当面76がストッパ62の右側の当接面86に突き当たっている場合で、かつ、仮に、ステアリングアーム61の突当面76及びストッパ62の当接面86の配置方向を変更したときに、曲げ荷重ベクトルWtの値がどのように変化するのかを示している。なお、図21(a)〜図21(c)は、タイロッド用孔72の中心点O72、突当中心位置O76、及び、出力軸22の中心点O22は、それぞれ図20に示す位置関係になっている。
図21(a)は、図20に示すステアリングアーム61の突当面76及びストッパ62の当接面86の配置方向を変更していないときの状態を示している。すなわち、図21(a)は、ステアリングアーム61の中心線L61とステアリングアーム61の突当面76とのなす角度θ76が90°に設定されている場合の例を示している。換言すれば、図21(a)は、ストッパ62の中心線L62とストッパ62の当接面86とのなす角度θ86が45°に設定されている場合の例を示している。
また、図21(b)は、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とが直交するように、図21(a)に示す状態からステアリングアーム61の突当面76の配置方向を角度θb1だけ中心線L61側に傾けたときの状態を示している。すなわち、図21(b)は、ステアリングアーム61の中心線L61とステアリングアーム61の突当面76とのなす角度θ76が90°よりも小さな(90−θb1)°に設定されている場合の例を示している。換言すれば、図21(b)は、ストッパ62の中心線L62とストッパ62の当接面86とのなす角度θ86が45°よりも大きな(45+θb1)°に設定されている場合の例を示している。
また、図21(c)は、図21(a)に示す状態からステアリングアーム61の突当面76の配置方向を角度θb2(ただし、角度θb2>角度θb1)だけ中心線L61側に傾けたときの状態を示している。すなわち、図21(c)は、ステアリングアーム61の中心線L61とステアリングアーム61の突当面76とのなす角度θ76が図21(b)に示す状態の角度(90−θb1)°よりもさらに小さな(90−θb2)°に設定されている場合の例を示している。換言すれば、図21(c)は、ストッパ62の中心線L62とストッパ62の当接面86とのなす角度θ86が(45+θb1)°よりもさらに大きな(45+θb2)°に設定されている場合の例を示している。
前記した通り、曲げ荷重ベクトルWtの値は、入力荷重ベクトルWhと突当荷重ベクトルWbとを合成した合成ベクトルの値となる。そのため、ステアリングアーム61がストッパ62に衝突した場合におけるステアリングアーム61に対するタイロッド8の取付方向が同一であると仮定したとき、つまり、タイロッド8の取付方向である入力荷重ベクトルWhの方向が同一であると仮定したとき、曲げ荷重ベクトルWtは、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とのなす角度θhbが小さくなる程に、値が増大し、逆に、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とのなす角度θhbが大きくなる程に、値が低下する傾向にある。
図21(a)に示す例では、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とのなす角度θhbが、鋭角(0〜90°未満)になっている。図21(b)に示す例では、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とのなす角度θhbが直角(90°)になっている。図21(c)に示す例では、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とのなす角度θhbが鈍角(90〜180°)になっている。
そのため、図21(a)に示す例では、曲げ荷重ベクトルWtが、入力荷重ベクトルWhと突当荷重ベクトルWbとを直交させたときの合成ベクトルの値(図21(b)に示す状態の曲げ荷重ベクトルWtの値)よりも大きな値になっている。一方、図21(c)に示す例では、曲げ荷重ベクトルWtが、入力荷重ベクトルWhと突当荷重ベクトルWbとを直交させたときの合成ベクトルの値(図21(b)に示す状態の曲げ荷重ベクトルWtの値)よりも小さな値になっている。
したがって、アームストッパ機構60は、図21(c)に示すように、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とのなす角度θhbを大きくして、入力荷重ベクトルWhの方向と突当荷重ベクトルWbとが互いを打ち消し合うように作用させることによって、出力軸22にかかる曲げ荷重ベクトルWtの値を抑制することができる。
ここで、前記した通り、図21(a)は、ステアリングアーム61の中心線L61とステアリングアーム61の突当面76とのなす角度θ76が90°に設定されている場合の例、すなわち、ストッパ62の中心線L62とストッパ62の当接面86とのなす角度θ86が45°に設定されている場合の例を示している。
また、図21(b)は、ステアリングアーム61の中心線L61とステアリングアーム61の突当面76とのなす角度θ76が90°よりも小さな(90−θb1)°に設定されている場合の例、すなわち、ストッパ62の中心線L62とストッパ62の当接面86とのなす角度θ86が45°よりも大きな(45+θb1)°に設定されている場合の例を示している。
また、図21(c)は、ステアリングアーム61の中心線L61とステアリングアーム61の突当面76とのなす角度θ76が(90−θb1)°よりもさらに小さな(90−θb2)°に設定されている場合の例、すなわち、中心線L61とストッパ62の当接面86とのなす角度θ86が(45+θb1)°よりもさらに大きな(45+θb2)°に設定されている場合の例を示している。
したがって、図21(a)〜図21(c)に示す関係からは、中心線L61と突当面76とのなす角度θ76が小さくなるに従って、また、これに相対して、中心線L61とストッパ62の当接面86とのなす角度θ86が大きくなるに従って、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とのなす角度θhbが大きくなることが分かる。
そのため、アームストッパ機構60は、ステアリングアーム61の中心線L61と突当面76とのなす角度θ76を小さくすることによって(すなわち、中心線L61とストッパ62の当接面86とのなす角度θ86を大きくすることによって)、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とのなす角度θhbを大きくすることができる。これにより、アームストッパ機構60は、入力荷重ベクトルWhの方向と突当荷重ベクトルWbとが互いを打ち消し合うように作用させることができ、その結果、出力軸22にかかる曲げ荷重ベクトルWtの値を抑制することができる。
ただし、比較例に係るアームストッパ機構60は、入力荷重ベクトルWhの方向と突当荷重ベクトルWbとが互いを打ち消し合うように作用させて、出力軸22にかかる曲げ荷重ベクトルWtの値を抑制することを考慮した構成になっていない。そのため、アームストッパ機構60は、比較的大きな曲げ荷重が出力軸22にかかる場合があり、この場合に、出力軸22を支持している軸受32A,32B(図3参照)や、トーションバー27を介して出力軸22に連結されている入力軸21を支持している軸受31(図3参照)、それらの周囲のハウジング113(図3参照)に過大な負荷がかかる可能性がある。また、この場合に、曲げ荷重が強い反力としてバーハンドル2に伝播し、その結果、操縦がし難くなる。
<6−1:第1実施形態に係るアームストッパ機構の構成>
本第1実施形態に係るアームストッパ機構160(図2及び図7参照)は、このような観点から、出力軸22にかかる曲げ荷重ベクトルWtの値を抑制するために、図21(c)に示す検討例に係るアームストッパ機構のように、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とのなす角度θhb(図11参照)が、比較例に係るアームストッパ機構60の角度θhb(図21(a)参照)よりも大きくなるように(好ましくは、鈍角になるように)構成したものである。
すなわち、本第1実施形態に係るアームストッパ機構160は、例えば、図6に示すように、乗鞍型車両100の走行中に、乗鞍型車両100を最大旋回させるために、ステアリングアーム161がストッパ162に当接して、ステアリングアーム161に突当荷重ベクトルWbが入力されている場合において、旋回内側の車輪(前輪)9に突起物(岩等)511が衝突し、タイロッド8を介して入力荷重ベクトルWhがステアリングアーム161に入力されたとき、ステアリングアーム161から出力軸22に作用し出力軸22を曲げようとする曲げ荷重ベクトルWt(図11参照)を小さくするように構成したものである。
具体的には、本第1実施形態に係るアームストッパ機構160は、図8に示すように、ステアリングアーム161の中心線L161と突当面176とのなす角度θ176が、比較例に係るアームストッパ機構60の角度θ76(図21(a)参照)よりも小さくなるように、また、これに相対して、ストッパ162の中心線L162と当接面186とのなす角度θ186が、比較例に係るアームストッパ機構60の角度θ86(図21(a)参照)よりも大きくなるように、構成されたものである。
以下、図7〜図10を参照して、本第1実施形態に係るアームストッパ機構160の構成について説明する。図7は、下面方向から見たアームストッパ機構160の概略構成図である。図8は、下面方向から見たアームストッパ機構160のステアリングアーム161の概略構成図である。図8(a)は、ステアリングアーム161の各部位の構成を示しており、図8(b)は、ステアリングアーム161の各部位の配置位置を示している。図9は、下面方向から見たアームストッパ機構160のストッパ162の概略構成図である。図9(a)は、ストッパ162の各部位の構成を示しており、図9(b)は、ストッパ162の各部位の配置位置を示している。図10は、アームストッパ機構160の各部材の理想的な配置関係を示す模式図である。
アームストッパ機構160は、図7に示すように、比較例に係るアームストッパ機構60と比較すると、ステアリングアーム161及びストッパ162の形状が異なる点で相違している。
図7は、下面方向から見た、アームストッパ機構160の構成を示している。図7に示すように、アームストッパ機構160は、出力軸22を中心にして回動するステアリングアーム161と、ストッパ162と、を備えている。
なお、ステアリングアーム161は、出力軸22とスプライン結合しており、出力軸22と一体で、出力軸22の中心点O22(中心軸線)を中心にして回動するようになっている。
そのステアリングアーム161の本体(タイロッド8が取り付けられる部位)は、図2に示すように、全体が板状に形成されている。そして、ステアリングアーム161は、図7及び図8に示すように、下側から見た形状が、中心角が鋭角な角度で展開された扇形に対し、扇形の両翼を中途部分で周方向外側に屈折させた形状となっている。
すなわち、ステアリングアーム161は、基端部側から先端部側に向かうに従って漸次拡幅されている。ステアリングアーム161は、中心線L161を境にして左右対称の形状である。ステアリングアーム161の両側面は、径方向の略中間部において、基端部側より先端部側が周方向外側に向けて屈曲している。
さらに、ステアリングアーム161は、図8に示すように、出力軸用孔171が扇形の要(中心軸)の位置に配置されており、2つのタイロッド用孔172a,172bが扇形の自由端付近(外周縁)の任意の位置に配置された形状になっている。以下、タイロッド用孔172a,172bを総称する場合に「タイロッド用孔172」と称する。
すなわち、ステアリングアーム161の基端部には、円形断面の出力軸用孔171が貫通形成され、先端部には、タイロッド用孔172a,172bが貫通形成されている。
出力軸用孔171は、その内部に出力軸22が嵌め込まれることによって、その中心点が出力軸22の中心点O22と一致した状態になる。以下、出力軸用孔171の中心点を「中心点O22」と称する。
タイロッド用孔172a,172bは、ステアリングアーム161の中心線L161の左右の均等な位置に配置されている。中心線L161は、出力軸用孔171の中心点O22を通り径方向に延びると共に、略扇形のステアリングアーム161を周方向において二等分する仮想線である。すなわち、中心線L161は、周方向におけるステアリングアーム161の対称中心線である。図8に示す例では、タイロッド用孔172a,172bは、それぞれの中心点O172が、出力軸用孔171の中心点O22から後方側に距離T172の位置で、かつ、ステアリングアーム161の中心線L161から左右に距離H172の位置に配置されている。
なお、ここでは、「ステアリングアーム161の中心線L161」が出力軸用孔171の中心点O22の上を通って前後方向に延伸する仮想上の直線であるものとして説明する。「ステアリングアーム161の中心線L161」は、バーハンドル2の転舵角度が中立状態の0°になっている場合に、後記する「ストッパ162の中心線L162(図9参照)」と一致した状態になる。その「ストッパ162の中心線L162」は、車両全体の中心線(車両の幅方向の中心点を通って車両の前後方向に延伸する仮想上の直線)でもある。
ステアリングアーム161は、出力軸用孔171を円弧状に囲む、半径H178の円弧部178を備えている。また、ステアリングアーム161は、扇形の両翼の中途部分から周方向外側に屈折している部位(外側に張り出している部位)174a,174bを備えており、その部位174a,174bがストッパ162に突き当たる突当部として機能する。以下、部位174aを「突当部174a」と称し、部位174bを「突当部174b」と称する。また、突当部174a,174bを総称する場合に「突当部174」と称する。
突当部174a,174bは、板状に形成されたステアリングアーム161の本体(タイロッド8が取り付けられる部位)の側面部分が平坦面176a,176bとして形成されており、その平坦面176a,176bがストッパ162に突き当てられる突当面として機能する。
すなわち、ステアリングアーム161の両側面において、径方向の中間部よりも先端部側の部位に突当面176a,176bが形成されている。
以下、平坦面176aを「突当面176a」と称し、平坦面176bを「突当面176b」と称する。また、突当面176a,176bを総称する場合に「突当面176」と称する。
なお、図8中、線L176aは、突当面176aに沿って仮想的に配置した直線を示している。また、線L176bは、突当面176bに沿って仮想的に配置した直線を示している。また、長さH176は、ステアリングアーム161の線L176aと線L176bとが交差する点O162から突当面176の端部までの距離を示している。
一方、ストッパ162は、図2に示すように、電動パワーステアリング装置101のハウジング113の下面側から下方向に突出するように設けられている。ストッパ162は、図9に示すように、下側から見た形状が略台形状の台形部162aと略長方形状の長方形部162bとを台形部162aの下底と長方形部162bの長辺とで接合させた(組み合わせた)形状となっている。
台形部162a及び長方形部162bは、ストッパ162の中心線L162と垂直に交差するように配置され、左右方向に延びている。なお、ここでは、「ストッパ162の中心線L162」が出力軸22の中心点O22の上を通って前後方向に延伸する仮想上の直線であるものとして説明する。「ストッパ162の中心線L162」は、車両全体の中心線でもある。
台形部162a及び長方形部162bは、台形部162aの下底の中央点と長方形部162bの長辺の中央点とが出力軸22の中心点O22と一致するように配置されている。そして、ストッパ162には、前側に凹む1/2円形の切欠部181(図9(a)参照)が、出力軸22の中心点O22を中心にして、出力軸22の前半分を囲むように形成されている。
すなわち、切欠部181は、ストッパ162の後縁部の左右方向中央部に形成され、後方が開放した半円状の凹部である。切欠部181は、出力軸22が挿通される部位であり、出力軸22の中心点O22が切欠部181内に配置されている。
また、ストッパ162は、ハウジング113の下面側からの突出量が台形部162aの前端側から長方形部162bの後端側に向かうにつれて大きくなるように、構成されている。また、長方形部162bの後端面において、切欠部181の左右両側には、当接面186a,186bが形成されている。ストッパ162では、当接面186のみがステアリングアーム161と当接するように構成されている。
図9に示す例では、台形部162aは、上底の幅をH162aとし、下底の幅をH162bとし、高さをT162aとする形状に形成されている。また、長方形部162bは、長辺の幅をH162bとし、短辺の幅をT162bとする形状に形成されている。
長方形部162bの短辺は、ステアリングアーム161に設定された離間距離T176(図8(b)参照)と同じ値の幅T162bに構成されている。離間距離T176は、ステアリングアーム161の出力軸用孔171の中心点O22上を通る突当面176に平行な平行面と突当面176との間の距離である。長方形部162bは、台形部162aと接合されていない側の長辺に位置する平坦面186a,186bがステアリングアーム161の突当面176(図8(a)参照)と当接する当接面として機能する。以下、平坦面186aを「当接面186a」と称し、平坦面186bを「当接面186b」と称する。また、当接面186a,186bを総称する場合に「当接面186」と称する。
ストッパ162において、ストッパ162の中心線L162と当接面186とのなす角度θ186が90°に設定されている。したがって、当接面186a及び当接面186bは、互いのなす角度(2つの当接面186a,186bの間の角度であって、ストッパ162の内部に形成される角度)θst1が180°に設定されている。すなわち、長方形部162bの後縁部の左右方向の中間位置(点O186)を中心として、当接面186a,186bは、180°の角度で開いている。
なお、図9中、線L186aは、当接面186aに沿って仮想的に配置した直線を示している。また、線L186bは、当接面186bに沿って仮想的に配置した直線を示している。また、点O186は、ストッパ162の線L186aと線L186bとが交差する点を示している。図9に示す例では、線L186a及び線L186bは、角度θst1が180°に設定されているため、重なった状態になっている。
このようなアームストッパ機構160は、ステアリングアーム161の各部位が図10に示す構成になっているとよい。図10は、アームストッパ機構160の各部材の理想的な構成を示す模式図である。図10(a)は、ステアリングアーム161の各部位の配置位置を示しており、図10(b)は、ステアリングアーム161の突当面176a,176bの配置方向の角度を示している。
ここでは、ステアリングアーム161の突当面176(図8(a)参照)の配置位置を重点的に説明する。そのステアリングアーム161の突当面176が突き当てられるストッパ162(図2及び図7参照)は、各部位がステアリングアーム161に対応した構成になっている。
図10中、線L161は、ステアリングアーム161の中心線を示している。また、点O22は、ステアリングアーム161の出力軸用孔171(図8(a)参照)の中心点及び出力軸22の中心点を示している。また、点O172は、ステアリングアーム161のタイロッド用孔172(図8(a)参照)の中心点を示している。また、点O176は、ステアリングアーム161の突当中心位置(すなわち、本第1実施形態に係るステアリングアーム161の突当面176とストッパ162の当接面186(図9(a)参照)とが当接する部位の中心位置)を示している。また、長さH172は、ステアリングアーム161の中心線L161からタイロッド用孔172の中心点O172までの距離を示している。
アームストッパ機構160は、図21(a)に示す比較例に係るアームストッパ機構60並びに図21(b)及び図21(c)に示す第1及び第2検討例に係るアームストッパ機構の特性から分かるように、ステアリングアーム161の中心線L161と突当面176とのなす角度θ176を小さくすることによって、また、これに相対して、ストッパ162の中心線L162と当接面186とのなす角度θ186を大きくすることによって、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とのなす角度θhbを大きくすることができる。これにより、アームストッパ機構160は、入力荷重ベクトルWhの方向と突当荷重ベクトルWbとが互いを打ち消し合うように作用させることができ、その結果、出力軸22にかかる曲げ荷重ベクトルWtの値を抑制することができる。
そこで、アームストッパ機構160のステアリングアーム161は、ステアリングアーム161の中心線L161と突当面176とのなす角度θ176が、比較例に係るアームストッパ機構60のステアリングアーム61の角度θ76(図21(a)参照)よりも小さくなるように設定される。つまり、アームストッパ機構160のストッパ162は、ストッパ162の中心線L162と当接面186とのなす角度θ186が、比較例に係るアームストッパ機構60のストッパ62の角度θ86(図21(a)参照)よりも大きくなるように設定される。
ただし、アームストッパ機構160は、車両が横転しないように、バーハンドル2を最大転舵角度以上に回動させないようにする必要がある。そのため、アームストッパ機構160のステアリングアーム161は、バーハンドル2の最大転舵角度を規定するために、例えば、角度θ176の理想的な最適配置角度を45°とし、角度θ176に対して、設計上許容される角度(以下、「許容傾き角度」と称する)としてθα(例えば、10°)の角度が設定される。
アームストッパ機構160は、これらの条件を満たすように、ステアリングアーム161の突当面176a,176bが、ステアリングアーム161の中心線L161上の任意の点O162を中心にして、中心線L161に対して互いに逆向きに(45±θα)°の角度で傾いて配置された構成になっている。つまり、ステアリングアーム161の突当面176a,176bは、互いのなす角度(2つの突当面176a,176bの間の角度であって、ステアリングアーム161の内部に形成される角度)θar1が(90±2×θα)°の角度に設定されている。
このように、突当面176a,176bは、中心線L186上の点O162を中心として、(90±2×θα)°の角度で開いている。
例えば、図7は、許容傾き角度θαを0°とした場合のアームストッパ機構160の構成を示している。図7に示す例では、ステアリングアーム161に設けられた突当面176a,176b(図8参照)同士のなす角度θar1が、90°に設定されている。また、ストッパ162に設けられた当接面186a,186b(図9参照)同士のなす角度θst1が、180°に設定されている。また、ステアリングアーム161の右周り方向の最大転舵角度及び左周り方向の最大転舵角度の合計角度θdr1が、90°(すなわち、右周り方向の最大転舵角度が45°で、かつ、左周り方向の最大転舵角度が45°)に設定されている。
<6−2:第1実施形態に係るアームストッパ機構の主要部にかかる荷重ベクトル>
次に、図11を参照して、本第1実施形態に係るアームストッパ機構160の主要部にかかる荷重ベクトルについて説明する。図11は、アームストッパ機構160の主要部にかかる荷重ベクトルの説明図である。
ここでは、タイロッド用孔172からステアリングアーム161に入力される車輪9(図2参照)側からの荷重ベクトルを「入力荷重ベクトルWh」とし、ストッパ162の当接面186からステアリングアーム161の突当面176にかかる荷重ベクトルを「突当荷重ベクトルWb」とし、出力軸用孔171(図8(a)参照)に嵌め込まれた出力軸22にかかる荷重ベクトルを「曲げ荷重ベクトルWt」として説明する。
また、ここでは、ステアリングアーム161の突当面176とストッパ162の当接面186とが当接する部位の中心位置を「突当中心位置O176」とし、突当荷重ベクトルWbがその突当中心位置O176にかかるものとして説明する。なお、図11に示す例では、突当中心位置O176は、出力軸22の中心点O22から、右側に距離R1の位置で、かつ、後方側に距離T162b(すなわち、距離T176(図8(b)参照))の位置に設定されている。
また、ここでは、鞍乗型車両100の走行中に、鞍乗型車両100を最大左旋回させるために、バーハンドル2を左周り方向に最大転舵角度分だけ回動させた結果、図11に示すように、ステアリングアーム161の右側の突当面176がストッパ162の右側の当接面186に突き当たっている場合で、かつ、左側の車輪(前輪)9の側面の後方が突起物511(図6参照)に衝突するときを想定して説明する。この場合に、<3:ステアリングアームにかかる荷重ベクトル>の章で説明した原理によって、図11に示すように、アームストッパ機構160は、入力荷重ベクトルWhが左側のタイロッド用孔172の周囲にかかり、突当荷重ベクトルWbが突当中心位置O176にかかる。また、入力荷重ベクトルWhと突当荷重ベクトルWbとの合成ベクトルである曲げ荷重ベクトルWtが出力軸22にかかる。
係る構成において、曲げ荷重ベクトルWtの値は、入力荷重ベクトルWhと突当荷重ベクトルWbとを合成した合成ベクトルの値となる。なお、入力荷重ベクトルWhの方向は、ステアリングアーム161の突当面176とストッパ162の当接面186とが当接している場合において、タイロッド用孔172に取り付けられたタイロッド8(図2参照)の取付方向によって定まる。また、突当荷重ベクトルWbの方向は、ステアリングアーム161の突当面176に対して垂直な方向となる。
アームストッパ機構160は、ステアリングアーム161及びストッパ162が上記した構成になっているため、入力荷重ベクトルWhと突当荷重ベクトルWbとが互いを打ち消し合うように作用する。そのため、アームストッパ機構160は、比較例に係るアームストッパ機構60よりも、出力軸22にかかる曲げ荷重ベクトルWtの値を低下させることができる。そのため、アームストッパ機構160は、出力軸22にかかる曲げ荷重を抑制することができる。
特に、アームストッパ機構160は、出力軸22にかかる曲げ荷重ベクトルWtの値が、入力荷重ベクトルWhと突当荷重ベクトルWbとを仮に直交させたときの合成ベクトルの値以下になるように構成するとよい。これにより、アームストッパ機構160は、出力軸22にかかる曲げ荷重ベクトルWtの値を大幅に低下させることができ、その結果、効率よく、出力軸22にかかる曲げ荷重を抑制することができる。
このようなアームストッパ機構160は、ストッパ162の2つの当接面186同士のなす角度θst1が、ステアリングアーム161の2つの突当面176同士のなす角度θar1よりも大きく、かつ、90°以上に設定されることにより、入力荷重ベクトルWhの方向と突当荷重ベクトルWbとが互いを打ち消し合うように作用させることができる。その結果、アームストッパ機構160は、出力軸22にかかる曲げ荷重ベクトルWtの値を抑制することができ、もって、出力軸22にかかる曲げ荷重を抑制することができる。これにより、アームストッパ機構160は、出力軸22を支持している軸受32A,32Bや、トーションバー27を介して出力軸22に連結されている入力軸21を支持している軸受31(図3参照)、それらの周囲のハウジング113(図3参照)にかかる負荷を低減することができる。また、出力軸22にかかる曲げ荷重が抑制されるため、曲げ荷重が強い反力としてバーハンドル2に伝播することがなくなり、操縦性を向上させることができる。
しかも、アームストッパ機構160は、ストッパ162の2つの当接面186同士のなす角度θst1が、ステアリングアーム161の2つの突当面176同士のなす角度θar1よりも大きく、かつ、90°以上に設定されることにより、これに相対して、ステアリングアーム161の角度θar1を小さくすることができるため、ステアリングアーム161を小型に構成することができる。
この点について、以下に、説明する。
アームストッパ機構160は、出力軸22を中心にして、ストッパ162の存在しない範囲内でステアリングアーム161を回動させる。したがって、図7に示すように、アームストッパ機構161は、出力軸22を中心にして、全周方向の角度360°を、ストッパ162の2つの当接面186同士のなす角度θst1と、ステアリングアーム161の2つの突当面176同士のなす角度θar1と、ステアリングアーム161の右周り方向の最大転舵角度及び左周り方向の最大転舵角度の合計角度θdr1とに割り当てた構成になっている。
そのため、アームストッパ機構160は、左右の最大転舵角度を維持したまま、ストッパ162の2つの当接面186同士のなす角度θst1を大きくすると、これに相対して、ステアリングアーム161の2つの突当面176同士のなす角度θar1を小さくする構成となる。その結果、ステアリングアーム161が周方向において幅狭になり、ステアリングアーム161を小型に構成することができる。
特に、アームストッパ機構160は、ストッパ162の2つの当接面186同士のなす角度θst1が180°以上に設定されている場合に、ステアリングアーム161の2つの突当面176同士のなす角度θar1を一層小さくした構成となる。その結果、この場合に、アームストッパ機構160は、ステアリングアーム161を一層小型に構成することができる。
また、この場合に、アームストッパ機構160は、ステアリングアーム161が一層小型化されるため、突当荷重ベクトルWbがかかる突当中心位置O176を入力荷重ベクトルWhがかかるタイロッド用孔72の周囲に近づけることができる。そのため、この場合に、アームストッパ機構160は、効率よく、振動を抑制することができる。
また、アームストッパ機構160は、ステアリングアーム161の右周り方向の最大転舵角度及び左周り方向の最大転舵角度の合計角度θdr1として90°以上の角度を確保することが好ましい。そのため、アームストッパ機構160は、ストッパ162の2つの当接面186同士のなす角度θst1とステアリングアーム161の2つの突当面176同士のなす角度θar1との合計値が270°以下であることが好ましい。アームストッパ機構160は、この条件を満たす場合に、ステアリングアーム161の右周り方向の最大転舵角度及び左周り方向の最大転舵角度の合計角度θdr1として90°以上の角度を確保することができる。
以上の通り、第1実施形態に係るアームストッパ機構160によれば、出力軸22にかかる曲げ荷重ベクトルWtの値を抑制することができる。これにより、出力軸22を支持している軸受32A,32Bや、トーションバー27を介して出力軸22に連結されている入力軸21を支持している軸受31(図3参照)、それらの周囲のハウジング113(図3参照)にかかる負荷を低減することができる。また、出力軸22にかかる曲げ荷重が抑制されるため、曲げ荷重が強い反力としてバーハンドル2に伝播することがなくなり、操縦性を向上させることができる。また、ステアリングアーム161を小型に構成することができる。
また、電動パワーステアリング装置101は、アームストッパ機構160を搭載することによって、操縦性を向上させることができる。
≪第2実施形態≫
第1実施形態に係るアームストッパ機構160は、突当面176がステアリングアーム161の本体(タイロッド8が取り付けられる部位)の側面部分に設けられた構成になっている。そのステアリングアーム161は、バーハンドル2の最大転舵角度を規定するために、突当面176が形成されている突当部174を外側(回動方向)に張り出させた構成になっている。
これに対し、第2実施形態では、突当部を外側に張り出させないように構成されたアームストッパ機構260を提供する。
<第2実施形態に係るアームストッパ機構の構成>
以下、図12〜図14を参照して、本第2実施形態に係るアームストッパ機構260の構成について説明する。図12は、下面方向から見たアームストッパ機構260の概略構成図である。図13は、下面方向から見たアームストッパ機構260のステアリングアーム261の概略構成図である。図13(a)は、ステアリングアーム261の各部位の構成を示しており、図13(b)は、側面方向から見たステアリングアーム261の構成を示しており、図13(c)は、ステアリングアーム261の各部位の配置位置を示している。図14は、下面方向から見たアームストッパ機構260のストッパ262の概略構成図である。図14は、ストッパ262の各部位の構成を示している。
図12は、下面方向から見た、アームストッパ機構260の構成を示している。図12に示すように、アームストッパ機構260は、出力軸22を中心にして回動するステアリングアーム261と、ストッパ262と、を備えている。
そのステアリングアーム261の本体(タイロッド8が取り付けられる部位)は、図13(b)に示すように、全体が板状に形成されている。そして、ステアリングアーム261は、図12及び図13(a)に示すように、下側から見て中心角が鋭角な角度で展開された扇形となっている。さらに、ステアリングアーム261は、図13に示すように、出力軸用孔271が扇形の要(中心軸)の位置に配置されており、2つのタイロッド用孔272a,272bが扇形の自由端付近(外周縁)の両翼の近傍に配置された形状になっている。以下、タイロッド用孔272a,272bを総称する場合に「タイロッド用孔272」と称する。
出力軸用孔271は、その内部に出力軸22が嵌め込まれることによって、その中心点が出力軸22の中心点O22と一致した状態になる。以下、出力軸用孔271の中心点を「中心点O22」と称する。
タイロッド用孔272a,272bは、中立状態において、ステアリングアーム261の中心線L261の左右の均等な位置に配置されている。図13(c)に示す例では、タイロッド用孔272a,272bは、それぞれの中心点O272が、出力軸用孔271の中心点O22よりも後方の位置で、かつ、ステアリングアーム261の中心線L261から左右に距離H272の位置に配置されている。
なお、ここでは、「ステアリングアーム261の中心線L261」が出力軸用孔271の中心点O22の上を通って前後方向に延伸する仮想上の直線であるものとして説明する。「ステアリングアーム261の中心線L261」は、バーハンドル2の転舵角度が0°になっている場合(中立状態の場合)に、後記する「ストッパ262の中心線L262(図14参照)」と一致した状態になる。その「ストッパ262の中心線L262」は、車両全体の中心線(車両の幅方向の中心点を通って車両の前後方向に延伸する仮想上の直線)でもある。
ステアリングアーム261は、出力軸用孔271を円弧状(円状)に囲む、円弧部278を備えている。また、ステアリングアーム261は、ステアリングアーム261の本体(タイロッド8が取り付けられる部位)の上面の中央付近で上方に突出する突出部274を備えており(図13(a)及び図13(b)参照)、その突出部274がストッパ262に突き当たる突当部として機能する。以下、突出部274を「突当部274」と称する。
突当部274は、その側面部分が平坦面276a,276bとして形成されており、その平坦面276a,276bがストッパ262に突き当てられる突当面として機能する。以下、平坦面276aを「突当面276a」と称し、平坦面276bを「突当面276b」と称する。また、突当面276a,276bを総称する場合に「突当面276」と称する。
なお、図13(c)中、線L276aは、突当面276aに沿って仮想的に配置した直線を示している。また、線L276bは、突当面276bに沿って仮想的に配置した直線を示している。
一方、ストッパ262は、電動パワーステアリング装置201のハウジング213の下面側から下方向に突出するように設けられている。ストッパ262は、図14に示すように、下側から見た形状が、出力軸22の中心点O22とする1/3円弧状の切欠部281で切り欠けられた略円形状の形状となっている。ストッパ262は、切欠部281で切り欠けられた周方向外側の端面286a,286bが当接面として機能する。以下、端面286aを「当接面286a」と称し、端面286bを「当接面286b」と称する。また、当接面286a,286bを総称する場合に「当接面286」と称する。
なお、ここでは、「ストッパ262の中心線L262」が出力軸22の中心点O22の上を通って前後方向に延伸する仮想上の直線であるものとして説明する。「ストッパ262の中心線L262」は、車両全体の中心線でもある。
アームストッパ機構260は、図21(a)に示す比較例に係るアームストッパ機構60並びに図21(b)及び図21(c)に示す第1及び第2検討例に係るアームストッパ機構の特性から分かるように、ステアリングアーム261の中心線L261と突当面276とのなす角度θ276(図13(c)参照)を小さくすることによって、また、これに相対して、ストッパ262の中心線L262と当接面286とのなす角度θ286(図14参照)を大きくすることによって、入力荷重ベクトルWhの方向と突当荷重ベクトルWbの方向とのなす角度θhb(図15参照)を大きくすることができる。これにより、アームストッパ機構260は、入力荷重ベクトルWhの方向と突当荷重ベクトルWbとが互いを打ち消し合うように作用させることができ、その結果、出力軸22にかかる曲げ荷重ベクトルWtの値を抑制することができる。
そこで、アームストッパ機構260のステアリングアーム261は、ステアリングアーム261の中心線L261と突当面276とのなす角度θ276(図13(c)参照)が、比較例に係るアームストッパ機構60のステアリングアーム61の角度θ76(図21(c)参照)よりも小さくなるように設定される。つまり、アームストッパ機構260のストッパ262は、ストッパ262の中心線L262と当接面286とのなす角度θ286(図14参照)が、比較例に係るアームストッパ機構60のストッパ62の角度θ86(図21(a)参照)よりも小さくなるように設定される。
ただし、アームストッパ機構260は、車両が横転しないように、バーハンドル2を最大転舵角度以上に回動させないようにする必要がある。そのため、アームストッパ機構260のステアリングアーム261は、バーハンドル2の最大転舵角度を規定するために、例えば、中心線L261に対する突当面276の最適配置角度を、中心線L261に対するタイロッド用孔272の中心点O272と出力軸用孔271の中心点O22とを結ぶ仮想上の直線L276a,L276bの傾き角度θ276とし、角度θ276に対して、設計上許容される許容傾き角度としてθβ(例えば、5°)の角度が設定される。
アームストッパ機構260は、これらの条件を満たすように、ステアリングアーム261の突当面276a,276bが、出力軸用孔271の中心点O22を中心にして、中心線L261に対して互いに逆向きに(θ276±θβ)°の角度で傾いて配置された構成になっている(図13(c)参照)。つまり、ステアリングアーム261の突当面276a,276bは、互いのなす角度(2つの突当面276a,276bの間の角度であって、ステアリングアーム261の内部に形成される角度)θar2が(2×(θ276±θβ))°の角度に設定されている。
例えば、図12は、直線L276a,L276bの傾き角度θ276を15°(すなわち、ステアリングアーム261に設けられた突当面276a,276b(図13参照)同士のなす角度θar2を30°)とし、許容傾き角度θβを0°とした場合のアームストッパ機構260の構成を示している。図12に示す例では、アームストッパ機構260は、ステアリングアーム261に設けられた突当面276a,276b(図13参照)同士のなす角度θar2が、30°に設定されている。また、ストッパ262に設けられた当接面286a,286b(図14参照)同士のなす角度(2つの当接面286a,286bの間の角度であって、ストッパ262の内部に形成される角度)θst2が、230°に設定されている。また、ステアリングアーム261の右周り方向の最大転舵角度及び左周り方向の最大転舵角度の合計角度θdr2が、100°に設定されている。
<第2実施形態に係るアームストッパ機構の主要部にかかる荷重ベクトル>
以下、図15を参照して、アームストッパ機構260の主要部にかかる荷重ベクトルについて説明する。図15は、アームストッパ機構260の主要部にかかる荷重ベクトルの説明図である。
ここでは、タイロッド用孔272からステアリングアーム261に入力される車輪9(図2参照)側からの荷重ベクトルを「入力荷重ベクトルWh」とし、ストッパ262の当接面286からステアリングアーム261の突当面276にかかる荷重ベクトルを「突当荷重ベクトルWb」とし、出力軸用孔271(図13(a)参照)に嵌め込まれた出力軸22にかかる荷重ベクトルを「曲げ荷重ベクトルWt」として説明する。
また、ここでは、ステアリングアーム261の突当面276とストッパ262の当接面286とが当接する部位の中心位置を「突当中心位置O276」とし、突当荷重ベクトルWbがその突当中心位置O276にかかるものとして説明する。なお、図15に示す例では、突当中心位置O276は、出力軸22の中心点O22とタイロッド用孔272の中心点O272との間の位置で、かつ、出力軸22の中心点O22から距離R2の位置に設定されている。
また、ここでは、鞍乗型車両100の走行中に、鞍乗型車両100を最大左旋回させるために、バーハンドル2を左周り方向に最大転舵角度分だけ回動させた結果、図15に示すように、ステアリングアーム261の右側の突当面276がストッパ262の右側の当接面286に突き当たっている場合で、かつ、左側の車輪(前輪)9の側面の後方が突起物511(図6参照)に衝突するときを想定して説明する。この場合に、図15に示すように、アームストッパ機構260は、入力荷重ベクトルWhが左側のタイロッド用孔272の周囲にかかり、突当荷重ベクトルWbが突当中心位置O276にかかる。また、入力荷重ベクトルWhと突当荷重ベクトルWbとの合成ベクトルである曲げ荷重ベクトルWtが出力軸22にかかる。
曲げ荷重ベクトルWtの値は、入力荷重ベクトルWhと突当荷重ベクトルWbとを合成した合成ベクトルの値となる。なお、入力荷重ベクトルWhの方向は、ステアリングアーム261の突当面276とストッパ262の当接面286とが当接している場合において、タイロッド用孔272に取り付けられたタイロッド8(図2参照)の取付方向によって定まる。また、突当荷重ベクトルWbの方向は、ステアリングアーム261の突当面276に対して垂直な方向となる。
アームストッパ機構260は、ステアリングアーム261及びストッパ262が上記した構成になっているため、入力荷重ベクトルWhと突当荷重ベクトルWbとが互いを打ち消し合うように作用する。そのため、アームストッパ機構260は、比較例に係るアームストッパ機構60よりも、出力軸22にかかる曲げ荷重ベクトルWtの値を低下させることができる。そのため、アームストッパ機構260は、出力軸22にかかる曲げ荷重を抑制することができる。
このようなアームストッパ機構260は、特に、出力軸22にかかる曲げ荷重ベクトルWtの値が、入力荷重ベクトルWhと突当荷重ベクトルWbとを仮に直交させたときの合成ベクトルの値以下になるように構成するとよい。これにより、アームストッパ機構260は、出力軸22にかかる曲げ荷重ベクトルWtの値を大幅に低下させることができ、その結果、効率よく、出力軸22にかかる曲げ荷重を抑制することができる。
以上の通り、第2実施形態に係るアームストッパ機構260によれば、第1実施形態に係るアームストッパ機構160と同様に、出力軸22にかかる曲げ荷重ベクトルWtの値を抑制することができる。これにより、出力軸22を支持している軸受32A,32Bや、トーションバー27を介して出力軸22に連結されている入力軸21を支持している軸受31(図3参照)、それらの周囲のハウジング113(図3参照)にかかる負荷を低減することができる。また、出力軸22にかかる曲げ荷重が抑制されるため、曲げ荷重が強い反力としてバーハンドル2に伝播することがなくなり、操縦性を向上させることができる。
しかも、アームストッパ機構260によれば、ステアリングアーム261の突当部274が外側(回動方向)に張り出さない構成になっているため、第1実施形態に係るアームストッパ機構160よりも小型に構成することができる。
また、電動パワーステアリング装置201は、アームストッパ機構260を搭載することによって、操縦性を向上させることができる。
本発明は、前記した実施形態に限定されることなく、本発明の要旨を逸脱しない範囲で種々の変更や変形を行うことができる。
例えば、本発明は、動力をアシストしない構成(すなわち、電動モータ24を持たない構成)のステアリング装置にも適用することができる。
≪付記≫
本発明に係るアームストッパ機構は、好ましくは、ステアリング装置の出力軸を中心にして回動し、かつ、車輪が連結される2つのタイロッドが取り付けられるステアリングアームと、前記出力軸の周囲に設けられ、前記ステアリングアームの回動角度を規制するストッパと、を有し、前記ステアリングアームは、前記出力軸が嵌め込まれる出力軸用孔と、前記タイロッドがそれぞれ取り付けられる2つのタイロッド用孔と、前記ストッパに突き当てられる2つの突当面と、を備え、前記ストッパは、前記ステアリングアームの前記2つの突当面にそれぞれ当接する2つの当接面を備え、前記ステアリングアームの前記2つの突当面は、それぞれ、いずれか一方の前記突当面が前記ストッパの前記当接面に突き当たる場合に、遠い側の前記タイロッド用孔から入力される入力荷重ベクトルと当該突当面にかかる突当荷重ベクトルとが互いを打ち消し合うように作用する構成にするとよい。そして、前記2つの突当面は、前記出力軸用孔に嵌め込まれた前記出力軸にかかる曲げ荷重ベクトルが、前記入力荷重ベクトルと前記突当荷重ベクトルとを直交させたときの、前記入力荷重ベクトルと前記突当荷重ベクトルとの合成ベクトルの値以下になるように、配置されているとよい。なお、入力荷重ベクトルの方向は、タイロッド用孔に取り付けられたタイロッドの取付方向によって定まる。また、突当荷重ベクトルの方向は、ステアリングアームの突当面に対して垂直な方向となる。