JP2017191103A - 正方向フォーカス走査型の導光エンコーダ - Google Patents
正方向フォーカス走査型の導光エンコーダ Download PDFInfo
- Publication number
- JP2017191103A JP2017191103A JP2017080529A JP2017080529A JP2017191103A JP 2017191103 A JP2017191103 A JP 2017191103A JP 2017080529 A JP2017080529 A JP 2017080529A JP 2017080529 A JP2017080529 A JP 2017080529A JP 2017191103 A JP2017191103 A JP 2017191103A
- Authority
- JP
- Japan
- Prior art keywords
- light
- light guide
- light beam
- guide wheel
- parallel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34707—Scales; Discs, e.g. fixation, fabrication, compensation
- G01D5/34715—Scale reading or illumination devices
- G01D5/34723—Scale reading or illumination devices involving light-guides
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/0304—Detection arrangements using opto-electronic means
- G06F3/0317—Detection arrangements using opto-electronic means in co-operation with a patterned surface, e.g. absolute position or relative movement detection for an optical mouse or pen positioned with respect to a coded surface
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/3473—Circular or rotary encoders
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/0304—Detection arrangements using opto-electronic means
- G06F3/0312—Detection arrangements using opto-electronic means for tracking the rotation of a spherical or circular member, e.g. optical rotary encoders used in mice or trackballs using a tracking ball or in mouse scroll wheels
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0354—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of two-dimensional [2D] relative movements between the device, or an operating part thereof, and a plane or surface, e.g. 2D mice, trackballs, pens or pucks
- G06F3/03543—Mice or pucks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0362—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of one-dimensional [1D] translations or rotations of an operating part of the device, e.g. scroll wheels, sliders, knobs, rollers or belts
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34707—Scales; Discs, e.g. fixation, fabrication, compensation
- G01D5/34715—Scale reading or illumination devices
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Optical Transform (AREA)
- Lenses (AREA)
Abstract
Description
[第1の具体的な実施例]
[第2の具体的な実施例]
[第3の具体的な実施例]
[第4の具体的な実施例]
[実施例の実施可能な効果]
101 導光本体
102 外歯車状構造
1020 非球面突出部
103 内歯車状構造
1030 非球面突出部
11 環状入光面
110 非球面
13 環状出光面
130 非球面
13a 屈折面
13b 出光面
2a、2 発光モジュール
3a、3 光検知モジュール
31’ 第1の検知素子
32’ 第2の検知素子
33’ 第3の検知素子
34’ 第4の検知素子
31、31a〜31d 第1の露出検知領域
32、32a、32b 第2の露出検知領域
33 第3の露出検知領域
34 第4の露出検知領域
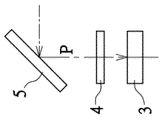
4 格子
41、41a〜41d 第1の開口孔
42、42a、42b 第2の開口孔
43 第3の開口孔
44 第4の開口孔
5 反射鏡
A 非球面構造
a1 第1の表面
a2 第2の表面
a3 第3の表面
a4 第4の表面
d 投影幅
E 導光エンコーダ
H1、H2、H3、H4 水平線
L 入射光ビーム
P 平行光ビーム
S 球面構造
S1、S2 感光チップ
W、W1、W2、W3、W4、D1、D2、D3、D4 幅
Claims (14)
- 導光型ホイールと、
前記導光型ホイールに囲まれる発光モジュールと、
前記導光型ホイールに隣接する、複数の検知素子を備える光検知モジュールと、
を備え、
各前記検知素子は露出検知エリアをそれぞれ有し、
前記複数の検知素子は、それぞれが互いに異なる平行線に沿って設けられており、前記複数の検知素子のそれぞれに含まれる前記露出検知エリアは、互いに前記平行線と平行な方向にずれて設けられている、正方向フォーカス走査型の導光エンコーダ。 - 前記導光型ホイールと前記光検知モジュールとの間に設けられ、複数の前記露出検知エリアをそれぞれ露出するための複数のスリットを備える格子を更に備える、請求項1に記載の正方向フォーカス走査型の導光エンコーダ。
- 前記導光型ホイールは、
内部周回表面が環状入光面である導光本体と、
前記導光本体の外部周回表面に設けられる外歯車状構造と、
を備え、
前記外歯車状構造は、順に接続され主軸を有する複数の球面又は複数の非球面から構成される環状出光面を有すると共に、複数の球面突出部又は複数の非球面突出部が順に一回りに接続されて構成され、
前記発光モジュールが生じた入射光ビームは前記環状入光面から前記導光型ホイールに入り、前記外歯車状構造の前記環状出光面を通過し、前記光検知モジュールに投射される平行光ビーム又は平行光に接近する近平行光ビームを形成する、請求項1に記載の正方向フォーカス走査型の導光エンコーダ。 - 前記導光型ホイールは、
外部周回表面が環状出光面である導光本体と、
前記導光本体の内部周回表面に設けられる内歯車状構造と、
を備え、
前記内歯車状構造は、順に接続され主軸を有する複数の球面又は複数の非球面から構成される環状入光面を有すると共に、複数の球面突出部又は複数の非球面突出部が順に一回りに接続されて構成され、
前記発光モジュールが生じた入射光ビームは前記内歯車状構造の前記環状入光面から前記導光型ホイールに入り前記環状出光面を通過し、前記光検知モジュールに投射される平行光ビーム又は平行光に接近する近平行光ビームを形成する、請求項1に記載の正方向フォーカス走査型の導光エンコーダ。 - 前記導光型ホイールは、
導光本体と、
前記導光本体の外部周回表面に設けられる外歯車状構造と、
前記導光本体の内部周回表面に設けられる内歯車状構造と、
を備え、
前記外歯車状構造は、順に接続され主軸を有する複数の球面又は複数の非球面から構成される環状出光面を有すると共に、複数の球面突出部又は複数の非球面突出部が順に一回りに接続されて構成され、
前記内歯車状構造は、順に接続され主軸を有する複数の球面又は複数の非球面から構成される環状入光面を有すると共に、複数の球面突出部又は複数の非球面突出部が順に一回りに接続されて構成され、
前記発光モジュールが生じた入射光ビームは前記内歯車状構造の前記環状入光面から前記導光型ホイールに入り、前記外歯車状構造の前記環状出光面を通過し、前記光検知モジュールに投射される平行光ビーム又は平行光に接近する近平行光ビームを形成する、請求項1に記載の正方向フォーカス走査型の導光エンコーダ。 - 前記導光型ホイールは非球面をそれぞれ有する複数の非球面突出部を有し、
前記発光モジュールが生じた入射光ビームは前記導光型ホイールの回転を介して、対応する前記非球面の一部を通過するか、又は対応する前記非球面の残りの部分によって屈折される、請求項1に記載の正方向フォーカス走査型の導光エンコーダ。 - 前記導光型ホイールの前記非球面は、二つの屈折面と二つの前記屈折面の間に接続される出光面とで構成される、請求項6に記載の正方向フォーカス走査型の導光エンコーダ。
- 前記入射光ビームの一部は前記導光型ホイールの回転を介して、対応する前記出光面を通過する、請求項7に記載の正方向フォーカス走査型の導光エンコーダ。
- 前記入射光ビームの一部が前記屈折面によって屈折される、請求項7に記載の正方向フォーカス走査型の導光エンコーダ。
- 前記平行光ビーム又は前記近平行光ビームの光ビーム幅は前記出光面の幅に等しい、請求項7に記載の正方向フォーカス走査型の導光エンコーダ。
- 各前記検知素子の前記露出検知エリアは複数の符号化領域に切り分けられ、
前記平行光ビーム又は前記近平行光ビームの光ビーム幅は前記符号化領域の幅よりも小さいか、又は前記符号化領域の幅に等しい、請求項6に記載の正方向フォーカス走査型の導光エンコーダ。 - 導光本体と、複数の非球面突出部を有する歯車状構造とを備える導光型ホイールと、
前記導光型ホイールに囲まれる発光モジュールと、
前記導光型ホイールに隣接する光検知モジュールと、
を備え、
前記発光モジュールが生じた入射光ビームは前記導光型ホイールを通過し、前記光検知モジュールに投射される平行光ビーム又は平行光に接近する近平行光ビームを形成し、
前記平行光ビーム又は前記近平行光ビームの光ビーム幅が前記非球面突出部の頂点の曲面の曲率で調整される、正方向フォーカス走査型の導光エンコーダ。 - 導光本体と、複数の突出部を有する歯車状構造とを備える導光型ホイールと、
前記導光型ホイールに囲まれる発光モジュールと、
前記導光型ホイールに隣接する光検知モジュールと、
を備え、
前記歯車状構造の各前記突出部の幅は前記光検知モジュールの幅に等しい、正方向フォーカス走査型の導光エンコーダ。 - 前記突出部は非球面突出部又は球面突出部である、請求項13に記載の正方向フォーカス走査型の導光エンコーダ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW105111838A TWI633282B (zh) | 2016-04-15 | 2016-04-15 | 正向對焦掃描式導光編碼器 |
| TW105111838 | 2016-04-15 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017191103A true JP2017191103A (ja) | 2017-10-19 |
| JP6449367B2 JP6449367B2 (ja) | 2019-01-09 |
Family
ID=59981118
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017080529A Active JP6449367B2 (ja) | 2016-04-15 | 2017-04-14 | 正方向フォーカス走査型の導光エンコーダ |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10345120B2 (ja) |
| JP (1) | JP6449367B2 (ja) |
| KR (1) | KR101939589B1 (ja) |
| CN (1) | CN107402644B (ja) |
| DE (1) | DE102017107833B4 (ja) |
| TW (1) | TWI633282B (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI585372B (zh) * | 2016-02-05 | 2017-06-01 | 曾信得 | 光學掃描式導光編碼器 |
| TWI633282B (zh) * | 2016-04-15 | 2018-08-21 | 曾信得 | 正向對焦掃描式導光編碼器 |
| CN106291507B (zh) * | 2016-07-21 | 2018-10-30 | 京东方科技集团股份有限公司 | 检测光测距装置及测距方法 |
| JP7066987B2 (ja) * | 2017-06-19 | 2022-05-16 | 船井電機株式会社 | 光走査装置及び光走査装置における反射部の角度検出方法 |
| TW201915671A (zh) * | 2017-09-28 | 2019-04-16 | 致伸科技股份有限公司 | 具慣性滾輪模組的滑鼠 |
| TWI659195B (zh) * | 2018-03-26 | 2019-05-11 | 慶揚國際有限公司 | 絕對位置編碼裝置 |
| TWI704330B (zh) * | 2019-03-08 | 2020-09-11 | 曾吉旺 | 光學式編碼器 |
| CN113641255B (zh) * | 2020-04-23 | 2023-09-12 | 重庆达方电子有限公司 | 鼠标滚轮装置及鼠标 |
| CN114334512B (zh) * | 2021-07-08 | 2024-03-15 | 光宝科技股份有限公司 | 按键结构 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS494551A (ja) * | 1972-03-15 | 1974-01-16 | ||
| JPS625130A (ja) * | 1985-07-01 | 1987-01-12 | Canon Inc | 光学式エンコ−ダ |
| JPH0416713A (ja) * | 1990-05-11 | 1992-01-21 | Toyota Autom Loom Works Ltd | 光学式リニアエンコーダ |
| JPH07167677A (ja) * | 1993-12-15 | 1995-07-04 | Nippon Hikyumen Lens Kk | エンコーダ |
| JPH10239108A (ja) * | 1997-02-21 | 1998-09-11 | Fanuc Ltd | 光学式エンコーダ |
| JPH11108694A (ja) * | 1997-10-06 | 1999-04-23 | Nikon Corp | 光学式エンコーダおよびレンズ鏡筒 |
| US6194708B1 (en) * | 1999-06-09 | 2001-02-27 | Ching Shun Wang | Focus-type encode device |
| JP2002257593A (ja) * | 2001-03-06 | 2002-09-11 | Koyo Seiko Co Ltd | 光学式エンコーダ |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3598493A (en) * | 1969-06-30 | 1971-08-10 | Ibm | Optical graduated rule of transparent material |
| GB2178529B (en) * | 1985-06-28 | 1989-12-28 | Canon Kk | Optical encoder |
| US4819051A (en) * | 1987-06-29 | 1989-04-04 | Honeywell Inc. | Compensated rotary position encoder |
| JPH01113616A (ja) * | 1987-10-27 | 1989-05-02 | Matsushita Electric Ind Co Ltd | 位置検出装置 |
| US5124548A (en) * | 1990-05-03 | 1992-06-23 | Canon Kabushiki Kaisha | Encoder for detecting relative displacement having first and second scales and a light receiving device |
| ES2054406T3 (es) | 1990-08-09 | 1994-08-01 | Hohner Elektrotechnik Kg | Dispositivo explorador optoelectronico. |
| US5168268A (en) * | 1991-06-05 | 1992-12-01 | Apple Computer, Inc. | Optically transmissive armature for cursor control device |
| JP3170902B2 (ja) * | 1992-09-30 | 2001-05-28 | キヤノン株式会社 | 信号処理方法及びそれを用いたエンコーダ |
| US5384460A (en) | 1993-11-03 | 1995-01-24 | Silitek Corporation | Encoder with a light emitting editing wheel |
| US5691534A (en) * | 1996-05-02 | 1997-11-25 | Tseng; Hsin-Te | Digital signal ouput device having a transparent gear wheel |
| CA2214193A1 (en) * | 1997-10-20 | 1999-04-20 | Pat Sin Hao | Optical encoder |
| US6127676A (en) * | 1998-02-20 | 2000-10-03 | Tseng; Hsin Te | Photo sensing device with means to eliminate light beam interference |
| US5969344A (en) * | 1998-02-20 | 1999-10-19 | Tseng; Hsin-Te | Photo detector for a data input device |
| US6100519A (en) | 1998-06-02 | 2000-08-08 | Ching Shun Wang | Photo-detector based calculating means having a grating wheel with integrated lenses |
| US6803560B1 (en) * | 1999-06-10 | 2004-10-12 | Canon Kabushiki Kaisha | Optical encoder |
| CN2535844Y (zh) * | 2001-12-10 | 2003-02-12 | 简千纯 | 具有二次聚光效果的编码器 |
| JP4315323B2 (ja) * | 2003-03-06 | 2009-08-19 | 株式会社ハーモニック・ドライブ・システムズ | 投影型ロータリエンコーダ |
| CN1601232A (zh) * | 2003-09-27 | 2005-03-30 | 光栅科技有限公司 | 光编码器光源 |
| CN1612156A (zh) * | 2003-10-30 | 2005-05-04 | 光栅科技有限公司 | 导光式编码器结构 |
| US6903661B1 (en) * | 2003-12-15 | 2005-06-07 | Optindex Co., Ltd. | Photoconductive encoder wheel |
| JP4880893B2 (ja) * | 2004-11-08 | 2012-02-22 | 株式会社ミツトヨ | 光電式エンコーダ |
| JP4724496B2 (ja) * | 2005-08-29 | 2011-07-13 | キヤノン株式会社 | 光学式エンコーダ |
| TW200900663A (en) * | 2007-06-22 | 2009-01-01 | Dyna Image Corp | Optical motion identification device utilizes partial total internal reflection light source and/or partial non-total internal reflection light source |
| US8035615B2 (en) * | 2007-11-13 | 2011-10-11 | Microsoft Corporation | User input device with ring-shaped scroll wheel |
| JP5974329B2 (ja) * | 2012-02-15 | 2016-08-23 | 株式会社ミツトヨ | 光電式エンコーダ |
| JP6359254B2 (ja) * | 2013-09-03 | 2018-07-18 | 株式会社ミツトヨ | 光電式エンコーダ |
| JP5832562B2 (ja) * | 2014-01-24 | 2015-12-16 | ファナック株式会社 | 樹脂製コード板を有する反射型光学式エンコーダ |
| TWI585372B (zh) * | 2016-02-05 | 2017-06-01 | 曾信得 | 光學掃描式導光編碼器 |
| TWI633282B (zh) * | 2016-04-15 | 2018-08-21 | 曾信得 | 正向對焦掃描式導光編碼器 |
-
2016
- 2016-04-15 TW TW105111838A patent/TWI633282B/zh active
-
2017
- 2017-03-08 CN CN201710135837.0A patent/CN107402644B/zh active Active
- 2017-04-11 DE DE102017107833.9A patent/DE102017107833B4/de not_active Expired - Fee Related
- 2017-04-12 KR KR1020170047557A patent/KR101939589B1/ko not_active Expired - Fee Related
- 2017-04-12 US US15/485,442 patent/US10345120B2/en active Active
- 2017-04-14 JP JP2017080529A patent/JP6449367B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS494551A (ja) * | 1972-03-15 | 1974-01-16 | ||
| JPS625130A (ja) * | 1985-07-01 | 1987-01-12 | Canon Inc | 光学式エンコ−ダ |
| JPH0416713A (ja) * | 1990-05-11 | 1992-01-21 | Toyota Autom Loom Works Ltd | 光学式リニアエンコーダ |
| JPH07167677A (ja) * | 1993-12-15 | 1995-07-04 | Nippon Hikyumen Lens Kk | エンコーダ |
| JPH10239108A (ja) * | 1997-02-21 | 1998-09-11 | Fanuc Ltd | 光学式エンコーダ |
| JPH11108694A (ja) * | 1997-10-06 | 1999-04-23 | Nikon Corp | 光学式エンコーダおよびレンズ鏡筒 |
| US6194708B1 (en) * | 1999-06-09 | 2001-02-27 | Ching Shun Wang | Focus-type encode device |
| JP2002257593A (ja) * | 2001-03-06 | 2002-09-11 | Koyo Seiko Co Ltd | 光学式エンコーダ |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI633282B (zh) | 2018-08-21 |
| TW201736804A (zh) | 2017-10-16 |
| US10345120B2 (en) | 2019-07-09 |
| KR20170118612A (ko) | 2017-10-25 |
| CN107402644A (zh) | 2017-11-28 |
| JP6449367B2 (ja) | 2019-01-09 |
| US20170299412A1 (en) | 2017-10-19 |
| CN107402644B (zh) | 2020-12-08 |
| DE102017107833A1 (de) | 2017-10-19 |
| KR101939589B1 (ko) | 2019-01-17 |
| DE102017107833B4 (de) | 2021-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6449367B2 (ja) | 正方向フォーカス走査型の導光エンコーダ | |
| TWI585372B (zh) | 光學掃描式導光編碼器 | |
| JP4252578B2 (ja) | 光学式エンコーダ | |
| EP2388512B1 (en) | Vehicle lightening unit | |
| JP6539112B2 (ja) | 車両用灯具ユニットおよび回転遮光部材 | |
| JP5951141B1 (ja) | 照明装置 | |
| CN110249175B (zh) | 具有拒绝中心透镜的介电准直器 | |
| JP6512639B2 (ja) | 光学走査式導光エンコーダ | |
| CN108571992B (zh) | 光学扫描式双层导光编码器 | |
| JP6740094B2 (ja) | 照明装置 | |
| TWI651938B (zh) | 光學掃描式雙層導光編碼器 | |
| JP2002257593A (ja) | 光学式エンコーダ | |
| TWI704330B (zh) | 光學式編碼器 | |
| JPWO2020080134A1 (ja) | 車両用灯具および回転リフレクタ | |
| JP6250289B2 (ja) | 光学面決定方法 | |
| JP6334099B2 (ja) | 光照射装置 | |
| JP4743142B2 (ja) | 車両用灯具 | |
| WO2019167444A1 (ja) | 光学部材および照明装置 | |
| KR20200005416A (ko) | 광학 소자 및 광학계 장치 | |
| JPWO2020022316A1 (ja) | 光放射装置及び物体情報検知装置 | |
| JP2017037139A (ja) | レンズシート及びその製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180516 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6449367 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |