JP2017196676A - ケーブルを備える関節機構 - Google Patents
ケーブルを備える関節機構 Download PDFInfo
- Publication number
- JP2017196676A JP2017196676A JP2016087478A JP2016087478A JP2017196676A JP 2017196676 A JP2017196676 A JP 2017196676A JP 2016087478 A JP2016087478 A JP 2016087478A JP 2016087478 A JP2016087478 A JP 2016087478A JP 2017196676 A JP2017196676 A JP 2017196676A
- Authority
- JP
- Japan
- Prior art keywords
- link
- optical fiber
- core wire
- joint
- cable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
- B25J19/0029—Means for supplying energy to the end effector arranged within the different robot elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/42—Coupling light guides with opto-electronic elements
- G02B6/4201—Packages, e.g. shape, construction, internal or external details
- G02B6/4256—Details of housings
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/27—Arm part
- Y10S901/28—Joint
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Light Guides In General And Applications Therefor (AREA)
- Mechanical Coupling Of Light Guides (AREA)
- Manipulator (AREA)
- Insertion, Bundling And Securing Of Wires For Electric Apparatuses (AREA)
Abstract
Description
図3に示されるように、脚部LRに備えられたリンクL1は、リンクL2と連結部KR1を介して連結している。図3においても、ロボットRの前後方向をX軸、左右方向をY軸、上下方向をZ軸として説明する。リンクL1には、連結部KR1に比べて上方(Z軸正の方向)かつリンクL1の右(Y軸負の方向)側面に固定された光送受信モジュールLO2が設けられている。リンクL2には、連結部KR1に比べて下方(Z軸負の方向)かつリンクL2の左側面に固定された光送受信モジュールLO2が設けられている。光送受信モジュールLO2と光送受信モジュールLO3との間に光ファイバケーブル11が接続されている。光ファイバケーブル11は、1本の光ファイバ芯線F1と、光ファイバ芯線F1の周りにチューブ状に形成され、光ファイバ芯線F1を内包し光ファイバ芯線F1のシースとなる被覆材C1とを備える。
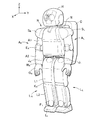
図5に示されるように、腕部ARに備えられたリンクA1は上下(Z軸方向)に延び、リンクA1の右側面(Y軸負の方向に向く面)には光送受信モジュールAO1が設けられている。リンクA1の下方には、上下に延びるリンクEが設けられており、リンクA1の下端及びリンクEの上端は連結部ER2を介してリンクEがリンクAに対して左右を軸とする回動可能であるように連結されている。連結部ER2においてリンクA1及びリンクEは連結時にリンクA1及びリンクEを共に回動軸に沿って左右に貫通する貫通孔をそれぞれ備え、連結支持管22がそれらの貫通孔を共に通過するように嵌合されている。連結支持管22の右端がリンクA1の貫通孔に固定され、連結支持管22の左端がリンクEの貫通孔に嵌合することによって連結され、リンクEは連結支持管22を備える連結部ER1を介してリンクEに左右(Y軸方向)を軸線とする回動可能に連結されている。リンクA2は連結部ER2においてリンクEに対して前後(X軸方向)を軸線とする回動可能に支持されている。連結部ER2にはリンクE及びリンクA2を前後に貫通する孔が設けられており、その貫通する孔に、前後に延びた管である連結支持管23が通されている。リンクEの前後に貫通する孔に連結支持管23の後端が固定され、リンクAの前後に貫通する孔に連結支持管23の前端が嵌合することによって、リンクA2はリンクEに対して前後を軸線とする回動可能に連結される。リンクA2は上下に延びた部材であって、連結部ER2の下方に光送受信モジュールAO2を備える。光送受信モジュールAO1とAO2とは光ファイバケーブル21によって接続され、光ファイバケーブル21がリンクA1及びリンクA2に敷設され、光ファイバケーブル21を備える関節機構201が腕部ARに構成されている。第1実施形態と同様に、光ファイバケーブル21は光ファイバ芯線F2及び光ファイバ芯線F2を管内に備えチューブ状に形成された被覆材C2とを備える。
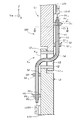
図6(A)に示されるように、リンクM1は上から下に管状に延び、その下端に設けられた開口部において径内方向に突出した第1係止爪M1−1を有する。リンクM1の管内でその内壁には、光送受信モジュールMO1が固定されている。リンクM1の下側からリンクM1の内孔に嵌合し円筒形に形成されたリンクM2が備えられている。リンクM2の管内でその内壁には、光送受信モジュールMO2が固定されている。リンクM1の内孔とリンクM2の内孔は連通しており、リンクM2の上側の開口端は、リンクM1の管内に収められている。リンクM2の開口端の外周には、リンクM1の内周に当接するまで径外方向へ突出した第2係止爪M2−1が備えられている。リンクM1の第1係止爪M1−1は、リンクM2の外周に当接している。リンクM1がリンクM2に対して下方向へ移動した時に第1係止爪M1−1と第2係止爪M2−1とが係合し、リンクM1がリンクM2から上方向へ離脱することを防止している。リンクM2の外周で、第2係止爪M2−1の下方には、径外方向へ突出した第2係止突起M2−2が備えられている。図6の(B)に示されるように、リンクM1がリンクM2に対して下方向へ移動した時に第1係止爪M1−1と第2係止突起M2−2が係合し、リンクM1の下方向への移動を規制している。リンクM2はリンクM1に対して上下にスライドし、リンクM2はリンクM1に対して上下に並進移動することが可能であるように連結されている。リンクM2はリンクM1に対して上下に並進移動することによって、互いに連結されたリンクM1及びリンクM2の全長が伸縮する伸縮関節部MRを備える関節機構301が形成されている。
図7に示されるように、リンクU1は上下に延びた下方に向けて開口する管状に形成され、リンクU1の下部の管内壁には径外方向に凹み周方向へ連なった凹部U1−1が設けられている。リンクU1には、リンクU1の下端の開口部からリンクU1と同軸になるように挿入された管状のリンクU2が連結されており、リンクU1とリンクU2とは連通している。リンクU2の外周面には、凹部U1−1と係合し、リンクU2のリンクU1に対する上下方向の変位を規制する凸部U2−1が設けられている。凹部U1−1と凸部U2−1とが係合することによって、リンクU2はリンクU1に対してリンクU1の軸線方向を中心とするねじれ変位可能に支持されている。リンクU1とリンクU2とによって、ねじれ変位可能な捩回関節部URを備える関節機構401が形成されている。
KR :膝関節部
KR1 :連結部
LO1、LO2 :光送受信モジュール
L1、L2 :リンク
11 :光ファイバケーブル
F1 :光ファイバ芯線
C1 :被覆材
P1、P2 :芯線保持部
Q1、Q2 :芯線係止部
P1−1 :芯線固定部
P1−2 :第1被覆材固定部
Q1−2 :第2被覆材固定部
12 :連結支持管
13 :連結支持管内孔
201 :第2の実施形態を示す関節機構
ER :肘関節部
ER1、ER2 :連結部
AO1、AO2 :光送受信モジュール
A1、A2 :リンク
E :リンク
21 :光ファイバケーブル
F2 :光ファイバ芯線
C2 :被覆材
P3、P4 :芯線保持部
Q3〜Q6 :芯線係止部
Q11〜Q14 :芯線係止部
22、23 :連結支持管
24、25 :連結支持管内孔
301 :第3の実施形態を示す関節機構
MR :伸縮関節部
MO1、MO2 :光送受信モジュール
M1、M2 :リンク
31 :光ファイバケーブル
F3 :光ファイバ芯線
C3 :被覆材
P5、P6 :芯線保持部
Q7、Q8 :芯線係止部
401 :第4の実施形態を示す関節機構
UR :伸縮関節部
UO1、UO2 :光送受信モジュール
U1、U2 :リンク
41 :光ファイバケーブル
F4 :光ファイバ芯線
C4 :被覆材
P7、P8 :芯線保持部
Q9、Q10 :芯線係止部
Claims (11)
- 関節を介して互いに変位可能に連結され、それぞれ信号送受信装置を備える第1リンク及び第2リンクと、
前記第1リンクの前記信号送受信装置と前記第2リンクの前記信号送受信装置とを繋ぐように敷設されるケーブル芯線を含むケーブルと、
前記第1リンク及び前記第2リンクのそれぞれに関節から離れた位置に設けられ、前記ケーブル芯線を対応するリンクに保持する芯線保持部と、
前記第1リンク及び前記第2リンクのそれぞれの前記芯線保持部よりも前記関節に近い位置に設けられ、前記ケーブル芯線を対応するリンクに所定の範囲で移動可能に係止する芯線係止部とを備えることを特徴とする関節機構。 - 前記芯線係止部が前記第1リンク及び前記第2リンクにそれぞれ複数設けられることを特徴とする請求項1に記載の関節機構。
- 前記ケーブル芯線が光ファイバ芯線であり、
前記信号送受信装置が光送受信装置であって、
前記ケーブルが前記光ファイバ芯線と前記光ファイバ芯線の軸線に直交する方向へ所定の範囲で移動可能に被覆する被覆材とを有する光ファイバケーブルであり、
前記芯線係止部が前記被覆材を前記リンクに固定する被覆材固定部を含むことを特徴とする請求項1又は請求項2に記載の関節機構。 - 前記芯線保持部が前記光ファイバ芯線を前記被覆材に固定する芯線固定部と前記被覆材を前記リンクに固定する被覆材固定部とを含むことを特徴とする請求項3に記載の関節機構。
- 前記光ファイバ芯線の許容曲げ半径が前記被覆材の許容曲げ半径よりも小さいことを特徴する請求項4に記載の関節機構。
- 前記関節が前記第2リンクを前記第1リンクに対して1つの回動軸を中心とする回動可能に前記第1リンクに連結する連結部によって構成され、
前記連結部が前記回動軸に沿って設けられた内孔を備える回動軸部材を有し、
前記光ファイバケーブルが前記内孔を通るように敷設されることを特徴とする請求項4又は請求項5に記載の関節機構。 - 前記第1リンクと前記第2リンクとの間に連結される少なくとも1つの中間リンクを備え、
前記第1リンクはリンクを互いに1つの回動軸を中心とする回動可能に連結する連結部を介して順番に前記第2リンクに連結され、
前記中間リンクのそれぞれに前記芯線係止部が少なくとも2つ設けられることを特徴とする請求項4又は請求項5に記載の関節機構。 - 全ての前記連結部が前記回動軸に沿って設けられた内孔を備える回動軸部材を有し、
前記光ファイバケーブルが全ての前記内孔を通るように敷設されることを特徴とする請求項7に記載の関節機構。 - 前記関節が前記第1リンクに対して前記第2リンクを並進変位させるように連結することを特徴とする請求項1から請求項5のいずれかに記載の関節機構。
- 前記関節が前記第1リンクに対して前記第2リンクをねじれ変位させるように連結することを特徴とする請求項1から請求項5のいずれかに記載の関節機構。
- 前記光ファイバケーブルが複数の前記光ファイバ芯線を備えることを特徴とする請求項3から請求項9のいずれかに記載の関節機構。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016087478A JP6675926B2 (ja) | 2016-04-25 | 2016-04-25 | ケーブルを備える関節機構 |
| US15/493,575 US9983369B2 (en) | 2016-04-25 | 2017-04-21 | Articulate joint mechanism having cable |
| DE102017206917.1A DE102017206917B4 (de) | 2016-04-25 | 2017-04-25 | Gelenkverbindungsmechanismus mit einem Kabel |
| CN201710276979.9A CN107303677B (zh) | 2016-04-25 | 2017-04-25 | 具有缆线的铰接关节机构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016087478A JP6675926B2 (ja) | 2016-04-25 | 2016-04-25 | ケーブルを備える関節機構 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017196676A true JP2017196676A (ja) | 2017-11-02 |
| JP6675926B2 JP6675926B2 (ja) | 2020-04-08 |
Family
ID=60021099
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016087478A Active JP6675926B2 (ja) | 2016-04-25 | 2016-04-25 | ケーブルを備える関節機構 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9983369B2 (ja) |
| JP (1) | JP6675926B2 (ja) |
| CN (1) | CN107303677B (ja) |
| DE (1) | DE102017206917B4 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10271921B2 (en) * | 2015-08-20 | 2019-04-30 | Sony Olympus Medical Solutions Inc. | Medical observation apparatus and medical observation system |
| JP6506195B2 (ja) * | 2016-03-09 | 2019-04-24 | ファナック株式会社 | 回転軸モジュールおよび多関節ロボット |
| JP6374471B2 (ja) * | 2016-11-28 | 2018-08-15 | ファナック株式会社 | 結合構造 |
| CN106584503B (zh) * | 2016-12-30 | 2023-09-08 | 深圳市优必选科技有限公司 | 机器人头肩转动复用结构 |
| DE112018005298A5 (de) * | 2017-09-19 | 2020-06-18 | Osram Gmbh | System zur Übertragung von Daten |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS612727U (ja) * | 1984-06-08 | 1986-01-09 | 株式会社明電舎 | 伸縮部の配線構造 |
| US5240092A (en) * | 1992-03-19 | 1993-08-31 | W. L. Gore & Associates, Inc. | Moving strain relief for spiralled flexible cable |
| JP2007038360A (ja) * | 2005-08-04 | 2007-02-15 | Hitachi High-Tech Control Systems Corp | 多関節搬送装置及びそれを用いた半導体製造装置 |
| JP2008048522A (ja) * | 2006-08-14 | 2008-02-28 | Yazaki Corp | リンクへのワイヤハーネスの配索構造 |
| JP2010214437A (ja) * | 2009-03-18 | 2010-09-30 | Matsumoto Kikai Kk | レーザ加工装置での光ファイバーケーブル保持機構 |
| JP2014030893A (ja) * | 2012-07-12 | 2014-02-20 | Canon Inc | ロボット |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2774146B1 (fr) * | 1998-01-26 | 2000-04-07 | Regis Julien | Faisceau plurifonctionnel, et robot industriel ainsi equipe |
| US9517106B2 (en) * | 1999-09-17 | 2016-12-13 | Intuitive Surgical Operations, Inc. | Systems and methods for commanded reconfiguration of a surgical manipulator using the null-space |
| ITTO20030139A1 (it) * | 2003-02-27 | 2004-08-28 | Comau Spa | Robot industriale |
| SE527313C2 (sv) * | 2003-06-13 | 2006-02-07 | Abb Ab | Armeringshölje som omsluter och fixerar internt kablage i radiell led vid en industrirobot |
| JP2015174208A (ja) | 2014-03-18 | 2015-10-05 | セイコーエプソン株式会社 | ロボット |
| DE202014010032U1 (de) * | 2014-12-18 | 2016-03-21 | Kuka Systems Gmbh | Kupplung mit kontaktloser Energie- und Datenübertragung |
-
2016
- 2016-04-25 JP JP2016087478A patent/JP6675926B2/ja active Active
-
2017
- 2017-04-21 US US15/493,575 patent/US9983369B2/en active Active
- 2017-04-25 DE DE102017206917.1A patent/DE102017206917B4/de not_active Expired - Fee Related
- 2017-04-25 CN CN201710276979.9A patent/CN107303677B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS612727U (ja) * | 1984-06-08 | 1986-01-09 | 株式会社明電舎 | 伸縮部の配線構造 |
| US5240092A (en) * | 1992-03-19 | 1993-08-31 | W. L. Gore & Associates, Inc. | Moving strain relief for spiralled flexible cable |
| JP2007038360A (ja) * | 2005-08-04 | 2007-02-15 | Hitachi High-Tech Control Systems Corp | 多関節搬送装置及びそれを用いた半導体製造装置 |
| JP2008048522A (ja) * | 2006-08-14 | 2008-02-28 | Yazaki Corp | リンクへのワイヤハーネスの配索構造 |
| JP2010214437A (ja) * | 2009-03-18 | 2010-09-30 | Matsumoto Kikai Kk | レーザ加工装置での光ファイバーケーブル保持機構 |
| JP2014030893A (ja) * | 2012-07-12 | 2014-02-20 | Canon Inc | ロボット |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102017206917A1 (de) | 2017-10-26 |
| CN107303677A (zh) | 2017-10-31 |
| JP6675926B2 (ja) | 2020-04-08 |
| DE102017206917B4 (de) | 2019-08-14 |
| US9983369B2 (en) | 2018-05-29 |
| US20170307836A1 (en) | 2017-10-26 |
| CN107303677B (zh) | 2020-09-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6675926B2 (ja) | ケーブルを備える関節機構 | |
| US11109925B2 (en) | Articulatable members having constrained motion and related devices and methods | |
| US9637357B2 (en) | Articulated operating arm with swivel joint mechanism | |
| US20170348176A1 (en) | High Performance Free Rolling Cable Transmission | |
| US10173317B2 (en) | Multi-articulated manipulator | |
| JP2020522339A (ja) | ロボット外科用器具 | |
| US20160213227A1 (en) | Bending portion of endoscope | |
| KR20160038757A (ko) | 로봇 | |
| JP2017196677A (ja) | ロボットの制御信号を伝送するための光ファイバ配線構造及び光ファイバネットワーク | |
| WO2019087448A1 (ja) | ケーブル保護装置 | |
| JP2016036726A (ja) | リンク組立体及びそれを用いた下肢支持装置 | |
| JP6423043B2 (ja) | 連結器具 | |
| US20160367327A1 (en) | Articulation | |
| JP4195295B2 (ja) | ケーブル中継器接続ジョイント | |
| JP2017522197A (ja) | 人間型特性のロボットの組立に対する改善 | |
| JP2018167386A (ja) | ロボット | |
| KR20210113504A (ko) | 착용식 근력 보조 장치에 적용되는 중력 보상 장치 | |
| US8864716B2 (en) | Device for monitoring and/or manipulating objects arranged in a cavity that can be accessed through a narrow opening | |
| KR101800282B1 (ko) | 다관절 장치 | |
| US11493720B2 (en) | Flexible fiber node connector | |
| JP2012223013A (ja) | 光ファイバケーブル支持具及びワイヤハーネス | |
| WO2019069747A1 (ja) | 内視鏡湾曲部及び内視鏡 | |
| JP2005246555A (ja) | ロボット用信号伝達装置 | |
| US20240246225A1 (en) | Robot for assisting limbs | |
| JPH04127992A (ja) | レーザー切断加工ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200310 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200311 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6675926 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |