JP2017207193A - トラクション減速機および電動機付き減速機 - Google Patents
トラクション減速機および電動機付き減速機 Download PDFInfo
- Publication number
- JP2017207193A JP2017207193A JP2016149242A JP2016149242A JP2017207193A JP 2017207193 A JP2017207193 A JP 2017207193A JP 2016149242 A JP2016149242 A JP 2016149242A JP 2016149242 A JP2016149242 A JP 2016149242A JP 2017207193 A JP2017207193 A JP 2017207193A
- Authority
- JP
- Japan
- Prior art keywords
- carrier
- traction
- axial direction
- internal ring
- sun roller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 239000003638 chemical reducing agent Substances 0.000 title claims abstract description 72
- 230000002093 peripheral effect Effects 0.000 claims abstract description 42
- 239000004519 grease Substances 0.000 claims description 11
- 210000000078 claw Anatomy 0.000 claims description 8
- 239000000969 carrier Substances 0.000 claims description 2
- 230000033001 locomotion Effects 0.000 description 12
- 239000000314 lubricant Substances 0.000 description 5
- 239000000463 material Substances 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
Images




Landscapes
- Friction Gearing (AREA)
Abstract
Description
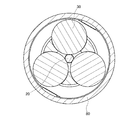
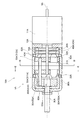
図1は、本実施形態に係るトラクション減速機1を含む電動機付き減速機10の斜視図である。図2は、本実施形態に係るトラクション減速機1を含む電動機付き減速機10の縦断面図である。この電動機付き減速機10は、モータ11から得られる第1回転数の回転運動を、第1回転数よりも低い第2回転数の回転運動に変換して、出力軸90を回転させる減速機である。本発明のトラクション減速機1および電動機付き減速機10は、例えば、電化製品の精密部品等に使用される。
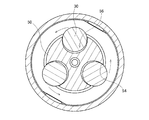
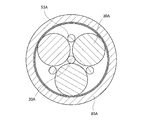
次に、第2実施形態に係る電動機付き減速機10Aおよびトラクション減速機1Aについて説明する。図6は、第2実施形態に係るトラクション減速機1Aを含む電動機付き減速機の縦断面図である。図7は、第2実施形態に係るトラクション減速機1Aの、図6のD−D断面図である。図8は、第2実施形態に係るトラクション減速機1Aの、図6のE−E断面図である。
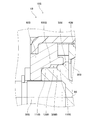
次に、第3実施形態に係る電動機付き減速機10Bおよびトラクション減速機1Bについて説明する。図9は、第3実施形態に係るトラクション減速機1Bを含む電動機付き減速機10Bの部分縦断面図である。なお、以下では、第1実施形態との相違点を中心に説明し、第1実施形態と同等の部分については、重複説明を省略する。
が形成される。空間120Bは、後述するグリースを溜める役割を果たし、これにより、出力軸90B側からのグリースの漏れが抑制される。また、互いに軸方向に離れた第1ラジアル軸受面110Bと第2ラジアル軸受面111Bとでキャリア50Bを支持するので、キャリア50Bが、傾いた状態で回転することを防止できる。
以上、本発明の例示的な実施形態について説明したが、本発明は上記の実施形態には限定されない。
9,9A,9B 回転軸
10,10A,10B 電動機付き減速機
11,11A モータ
12,12A 取付板
20,20A 太陽ローラ
30,30A,30B 遊星ローラ
31,31A 円板部
32,32A 軸部
33,33A 傾斜面
40,40A,40B インタナルリング
41,41A 固定インタナルリング
42,42A 可動インタナルリング
43,43A 第1回り止め部
50,50A,50B キャリア
511A,512A 第1キャリア部材
52A 第2キャリア部材
53A キャリアポール
54,54A 接触面
55 凹部
55A 貫通孔
56 収容部
60,60A,60B キャリア軸受
70,70A 弾性部材
80,80A ハウジング
81 爪部
82,82A 第2回り止め部
90,90A,90B 出力軸
110B 第1ラジアル軸受面
111B 第2ラジアル軸受面
120B 空間
500B キャリア段差面
600B 軸受段差面
Claims (18)
- トラクション減速機であって、
回転軸を中心として回転する太陽ローラと、
前記太陽ローラの周囲に配置された複数の遊星ローラと、
前記複数の遊星ローラに接触する一対の円環状のインタナルリングと、
前記遊星ローラを保持しつつ前記回転軸を中心として回転するキャリアと、
を有し、
前記複数の遊星ローラは、それぞれ、前記太陽ローラおよび前記インタナルリングの双方に接触しつつ、前記太陽ローラから動力を受けることによって、自転しながら前記回転軸を中心として公転し、
前記キャリアは、前記遊星ローラの外周面に対向する接触面を有し、
前記遊星ローラの外周面と、前記接触面とが、前記回転軸を中心とする周方向に接触する、トラクション減速機。 - 請求項1に記載のトラクション減速機であって、
前記遊星ローラは、
前記太陽ローラに接触する円板部と、
前記円板部の中央から軸方向の両側に延びる軸部と、
を有し、
前記キャリアの前記接触面は、前記軸部の外周面と周方向に接触する、トラクション減速機。 - 請求項2に記載のトラクション減速機であって、
前記軸部は、軸方向の前記円板部とは反対側の端部に、軸方向に対して傾斜した円環状の傾斜面を有し、
前記インタナルリングは、前記傾斜面に接触する、トラクション減速機。 - 請求項2または請求項3に記載のトラクション減速機であって、
前記キャリアは、前記回転軸を中心とする周方向に配列され、各々が径方向外側へ向けて開いた複数の収容部を有し、
前記収容部に、前記軸部が収容される、トラクション減速機。 - 請求項2に記載のトラクション減速機であって、
軸方向に伸縮する弾性部材をさらに有し、
前記軸部は、軸方向に対して傾斜した円環状の傾斜面を有し、
前記一対のインタナルリングは、
前記円板部よりも軸方向一方側に位置し、軸方向の位置が固定された固定インタナルリングと、
前記円板部よりも軸方向他方側に位置し、軸方向に移動可能な可動インタナルリングと、
を有し、
前記弾性部材は、前記可動インタナルリングを軸方向一方側に押圧し、
前記一対のインタナルリングが、前記遊星ローラを径方向内側へ加圧する、トラクション減速機。 - 請求項5に記載のトラクション減速機であって、
前記弾性部材は、前記キャリアの径方向外側に位置する、トラクション減速機。 - 請求項1から請求項6までのいずれか1項に記載のトラクション減速機であって、
前記太陽ローラは、軸方向の入力側から動力を受け、
前記キャリアに固定され、前記回転軸に沿って軸方向の前記入力側とは反対の出力側に延びる出力軸
をさらに有する、トラクション減速機。 - 請求項1から請求項7までのいずれか1項に記載のトラクション減速機であって、
前記キャリアを回転可能に支持するキャリア軸受をさらに有し、
前記キャリア軸受は、前記キャリアの外周面および軸方向の端面に接触する、トラクション減速機。 - 請求項8に記載のトラクション減速機であって、
前記キャリア軸受は、
互いに軸方向に離れた、各々が円環状の複数のラジアル軸受面
を有し、
前記キャリア軸受は、前記複数のラジアル軸受面において前記キャリアの外周面に接触する、トラクション減速機。 - 請求項9に記載のトラクション減速機であって、
前記キャリア軸受は、軸方向に対して垂直または斜めに拡がる環状の軸受段差面
を有し、
前記キャリアは、軸方向に対して垂直または斜めに拡がる環状のキャリア段差面
を有し、
前記軸受段差面と前記キャリア段差面とは、少なくとも一部において軸方向に対向し、
前記複数のラジアル軸受面は、少なくとも、前記軸受段差面と前記キャリア段差面よりも軸方向一方側、および前記軸受段差面と前記キャリア段差面よりも軸方向他方側に位置する、トラクション減速機。 - 請求項9または請求項10に記載のトラクション減速機であって、
前記複数の遊星ローラと、前記太陽ローラおよび前記インタナルリングの少なくとも1つとの間に、第1のグリースを有し、
前記複数のラジアル軸受面の少なくとも2つの間に形成される空間に、第2のグリースを有し、
前記第2のグリースの粘度は、前記第1のグリースの粘度よりも高い、トラクション減速機。 - 請求項8に記載のトラクション減速機であって、
前記インタナルリングを取り囲む円筒状の内周面をもつハウジングをさらに有し、
前記ハウジングは、径方向内側へ向けて延びる爪部を有し、
前記爪部は、前記キャリア軸受と軸方向に接触する、トラクション減速機。 - 請求項12に記載のトラクション減速機であって、
前記爪部と前記キャリア軸受とが、前記回転軸を中心とする周方向に接触する、トラクション減速機。 - 請求項1から請求項8までのいずれか1項に記載のトラクション減速機であって、
前記インタナルリングを取り囲む円筒状の内周面をもつハウジングをさらに有し、
前記インタナルリングは、外周面の一部分に非真円の第1回り止め部を有し、
前記ハウジングは、前記内周面の一部分に非真円の第2回り止め部を有し、
前記第1回り止め部と前記第2回り止め部とが接触する、トラクション減速機。 - 請求項14に記載のトラクション減速機であって、
前記インタナルリングは、前記回転軸を中心とする周方向に等間隔に配置された複数の前記第1回り止め部を有し、
前記ハウジングは、前記回転軸を中心とする周方向に等間隔に配置された複数の前記第2回り止め部を有する、トラクション減速機。 - 請求項1から請求項15までのいずれか1項に記載のトラクション減速機であって、
前記キャリアは、単一の部材である、トラクション減速機。 - 請求項1から請求項15までのいずれか1項に記載のトラクション減速機であって、
前記キャリアは、
前記接触面を有する円板状の第1キャリア部材と、
前記第1キャリア部材とは異なる軸方向位置に配置された第2キャリア部材と、
軸方向に延びるキャリアポールと、
を有し、
前記キャリアポールの軸方向の一端は、前記第1キャリア部材に固定され、
前記キャリアポールの軸方向の他端は、前記第2キャリア部材に固定される、トラクション減速機。 - 請求項1から請求項17までのいずれか1項に記載のトラクション減速機と、
前記回転軸を中心として前記太陽ローラを回転させる電動機と、
を有する、電動機付き減速機。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/018327 WO2017199941A1 (ja) | 2016-05-16 | 2017-05-16 | トラクション減速機および電動機付き減速機 |
| CN201780029857.8A CN109154367A (zh) | 2016-05-16 | 2017-05-16 | 牵引减速机及带有电动机的减速机 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016097991 | 2016-05-16 | ||
| JP2016097991 | 2016-05-16 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017207193A true JP2017207193A (ja) | 2017-11-24 |
Family
ID=60415413
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016149242A Withdrawn JP2017207193A (ja) | 2016-05-16 | 2016-07-29 | トラクション減速機および電動機付き減速機 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2017207193A (ja) |
| CN (1) | CN109154367A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111355331A (zh) * | 2018-12-21 | 2020-06-30 | 日本电产株式会社 | 致动器 |
| JP2020133719A (ja) * | 2019-02-15 | 2020-08-31 | 日本電産シンポ株式会社 | トラクション変速機およびアクチュエータ |
| JP2020159535A (ja) * | 2019-03-28 | 2020-10-01 | 日本電産シンポ株式会社 | トラクション減速機 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54140153U (ja) * | 1978-03-24 | 1979-09-28 | ||
| JPS6237561A (ja) * | 1985-08-09 | 1987-02-18 | Matsushita Electric Works Ltd | 減速機 |
| JPH09291994A (ja) * | 1996-02-28 | 1997-11-11 | Ntn Corp | 遊星ローラ式動力伝達装置 |
| JP2000065165A (ja) * | 1998-08-20 | 2000-03-03 | Namiki Precision Jewel Co Ltd | 遊星歯車減速機及びその組立方法 |
| JP2000130529A (ja) * | 1998-10-28 | 2000-05-12 | Ntn Corp | 摩擦式多段ローラ変速機 |
| JP2002171721A (ja) * | 2000-12-01 | 2002-06-14 | Nidec-Shimpo Corp | 回転駆動装置 |
| JP2006009936A (ja) * | 2004-06-25 | 2006-01-12 | Mitsubishi Heavy Ind Ltd | 遊星ローラ式動力伝達装置 |
| JP2007327567A (ja) * | 2006-06-08 | 2007-12-20 | Nachi Fujikoshi Corp | 不思議遊星ローラ式減速機 |
| JP2014238138A (ja) * | 2013-06-07 | 2014-12-18 | 株式会社不二越 | 遊星ローラ式摩擦伝動装置 |
| JP2016034223A (ja) * | 2014-07-31 | 2016-03-10 | 日本電産シンポ株式会社 | トラクション動力伝達減速装置および減速機付きモータ |
| JP2016070285A (ja) * | 2014-09-26 | 2016-05-09 | 日本電産シンポ株式会社 | 減速装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1988006688A1 (fr) * | 1987-02-27 | 1988-09-07 | Sumitomo Heavy Industries, Ltd. | Reducteur epicycloidal |
| JP6233805B2 (ja) * | 2013-11-01 | 2017-11-22 | 日本電産シンポ株式会社 | トラクション動力伝達装置 |
| CN103730976B (zh) * | 2013-11-30 | 2016-02-17 | 南阳防爆集团股份有限公司 | 煤矿主通风机用电机的稀油润滑轴承装置 |
| CN206320250U (zh) * | 2015-08-25 | 2017-07-11 | 日本电产新宝株式会社 | 行星辊式动力传递装置 |
-
2016
- 2016-07-29 JP JP2016149242A patent/JP2017207193A/ja not_active Withdrawn
-
2017
- 2017-05-16 CN CN201780029857.8A patent/CN109154367A/zh active Pending
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54140153U (ja) * | 1978-03-24 | 1979-09-28 | ||
| JPS6237561A (ja) * | 1985-08-09 | 1987-02-18 | Matsushita Electric Works Ltd | 減速機 |
| JPH09291994A (ja) * | 1996-02-28 | 1997-11-11 | Ntn Corp | 遊星ローラ式動力伝達装置 |
| JP2000065165A (ja) * | 1998-08-20 | 2000-03-03 | Namiki Precision Jewel Co Ltd | 遊星歯車減速機及びその組立方法 |
| JP2000130529A (ja) * | 1998-10-28 | 2000-05-12 | Ntn Corp | 摩擦式多段ローラ変速機 |
| JP2002171721A (ja) * | 2000-12-01 | 2002-06-14 | Nidec-Shimpo Corp | 回転駆動装置 |
| JP2006009936A (ja) * | 2004-06-25 | 2006-01-12 | Mitsubishi Heavy Ind Ltd | 遊星ローラ式動力伝達装置 |
| JP2007327567A (ja) * | 2006-06-08 | 2007-12-20 | Nachi Fujikoshi Corp | 不思議遊星ローラ式減速機 |
| JP2014238138A (ja) * | 2013-06-07 | 2014-12-18 | 株式会社不二越 | 遊星ローラ式摩擦伝動装置 |
| JP2016034223A (ja) * | 2014-07-31 | 2016-03-10 | 日本電産シンポ株式会社 | トラクション動力伝達減速装置および減速機付きモータ |
| JP2016070285A (ja) * | 2014-09-26 | 2016-05-09 | 日本電産シンポ株式会社 | 減速装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111355331A (zh) * | 2018-12-21 | 2020-06-30 | 日本电产株式会社 | 致动器 |
| CN111355331B (zh) * | 2018-12-21 | 2022-10-21 | 日本电产株式会社 | 致动器 |
| JP2020133719A (ja) * | 2019-02-15 | 2020-08-31 | 日本電産シンポ株式会社 | トラクション変速機およびアクチュエータ |
| JP2020159535A (ja) * | 2019-03-28 | 2020-10-01 | 日本電産シンポ株式会社 | トラクション減速機 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109154367A (zh) | 2019-01-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101622914B1 (ko) | 중공형 파동기어 유닛 | |
| KR101690036B1 (ko) | 베어링 홀더, 베어링 기구 및 파동기어장치 | |
| KR101646904B1 (ko) | 파동기어장치 | |
| JP2019158088A (ja) | サイクロイド減速機 | |
| JP6727034B2 (ja) | 歯車減速機 | |
| CN111585386A (zh) | 带制动器的马达、驱动装置以及车轮驱动装置 | |
| JP2017207193A (ja) | トラクション減速機および電動機付き減速機 | |
| JP2020076476A (ja) | サイクロイド減速機 | |
| KR101838924B1 (ko) | 회전 엑추에이터 | |
| JP2019044936A (ja) | 変速機 | |
| JP2016017625A (ja) | ホイールイン減速装置およびホイールユニット | |
| CN111577856A (zh) | 牵引变速器以及致动器 | |
| WO2017199941A1 (ja) | トラクション減速機および電動機付き減速機 | |
| JP6033733B2 (ja) | 遊星歯車機構の組み立て方法 | |
| JP5797929B2 (ja) | 電動式直動アクチュエータおよび電動式ディスクブレーキ装置 | |
| JP2009275853A (ja) | 減速機の出力部構造 | |
| JP2016080064A (ja) | トラクション動力伝達装置 | |
| JP6265061B2 (ja) | 遊星ローラ式トラクションドライブ装置 | |
| JP7235217B2 (ja) | 摩擦伝動式減速機 | |
| JP7380979B2 (ja) | 電動機付き変速機および台車駆動ユニット | |
| CN111162631B (zh) | 具有动力源的减速装置 | |
| JP2021014868A (ja) | ローラ式差動減速装置 | |
| JP2022092919A (ja) | トラクション変速機および電動機付きトラクション変速機 | |
| WO2018084096A1 (ja) | 複合変速モジュール | |
| JP7285723B2 (ja) | ギヤ装置およびギヤドモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20190620 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190703 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200706 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20200706 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201020 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20201225 |