JP2018193152A - クレーンの振れ止め制御に用いる振り子長の設定装置 - Google Patents
クレーンの振れ止め制御に用いる振り子長の設定装置 Download PDFInfo
- Publication number
- JP2018193152A JP2018193152A JP2017096320A JP2017096320A JP2018193152A JP 2018193152 A JP2018193152 A JP 2018193152A JP 2017096320 A JP2017096320 A JP 2017096320A JP 2017096320 A JP2017096320 A JP 2017096320A JP 2018193152 A JP2018193152 A JP 2018193152A
- Authority
- JP
- Japan
- Prior art keywords
- distance
- pendulum length
- rope
- crane
- pendulum
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Control And Safety Of Cranes (AREA)
Abstract
【解決手段】振り子の支点位置となる巻上装置3のロープ4の巻き出し位置G0から吊下具5の重心位置Gfまでの第1の距離Lfを特定するロープ長検出手段と、吊下具5の重心位置Gfから玉掛けロープ6を介して吊り下げられた吊荷7の重心位置Gwまでの第2の距離Lwを入力するための入力手段と、第1の距離Lf及び第2の距離Lwを合算して算出される振り子長Lsを可視的に表示する表示手段とを備える。
【選択図】図1
Description
T=2π×(Ls/g)1/2
ここで、T:荷振れ周期、Ls:振り子長、g:重力加速度である。
また、巻き上げ及び巻き下げ操作により、振り子長Lsのうち巻上装置3のロープの巻き出し位置G0から吊下具5の重心位置Gfまでの第1の距離Lfは、ロープの巻上下時のすべり等の影響を受けて動的に変わることとなる。
このクレーンは、走行レールに沿って走行するガーダー1と、ガーダー1に沿って横行するトロリ2と、トロリ2に搭載された巻上装置3と、巻上装置3にロープ4を介して取り付けられた吊下具(フック)5とを有するように構成されている。
ここで、第1の距離Lf及び第2の距離Lwを合算して算出された振り子長Lsは、従来から汎用されているクレーンの振れ止め制御装置に入力され、この振り子長Lsに基づいて決定した搬送速度パターンによって、クレーンを運転することで、確実に荷振れを抑制することができる。
そして、このロープ長検出手段は、巻き上げ及び巻き下げ操作により、ロープのすべり等の影響を受けて動的に変わることとなる第1の距離Lfを、リアルタイムで測定できるようにしている。
なお、これらの表示器を設けない場合は、操作パネルに、例えば、振り子長Lsの実長を表示するようにすることができる。
吊下具5の重心位置Gfから玉掛けロープ6を介して吊り下げられた吊荷7の重心位置Gwまでの第2の距離Lwを入力するための入力手段8は、図2に示すような、携帯操作器(無線操作器)の2個の押釦A、Bを用い、振れ止め制御のON−OFFの設定と、第2の距離Lw(玉掛け長さ)の設定を行うことができるようにしている。
具体的には、2個の押釦A、Bを同時に、例えば、5秒以上長押しすることによって、振れ止め制御のON−OFFの設定(切替)を行うことができるようにしている。
また、押釦Aを、例えば、2秒以上長押しすることによって、1秒毎に0.1m短くなるように、また、押釦Bを、例えば、2秒以上長押しすることによって、1秒毎に0.1m長くなるように、第2の距離Lwの設定を行うことができるようにしている。
1.振れ止め制御ありに切替
2個の押釦A、Bを同時に、例えば、5秒以上長押しすることによって、振れ止め制御のON−OFFの設定を行い、振れ止め制御ありにする。
振れ止め制御ありに切り替わると、例えば、クレーンの運転室階段下に取り付けた表示灯が点灯又は点滅する。
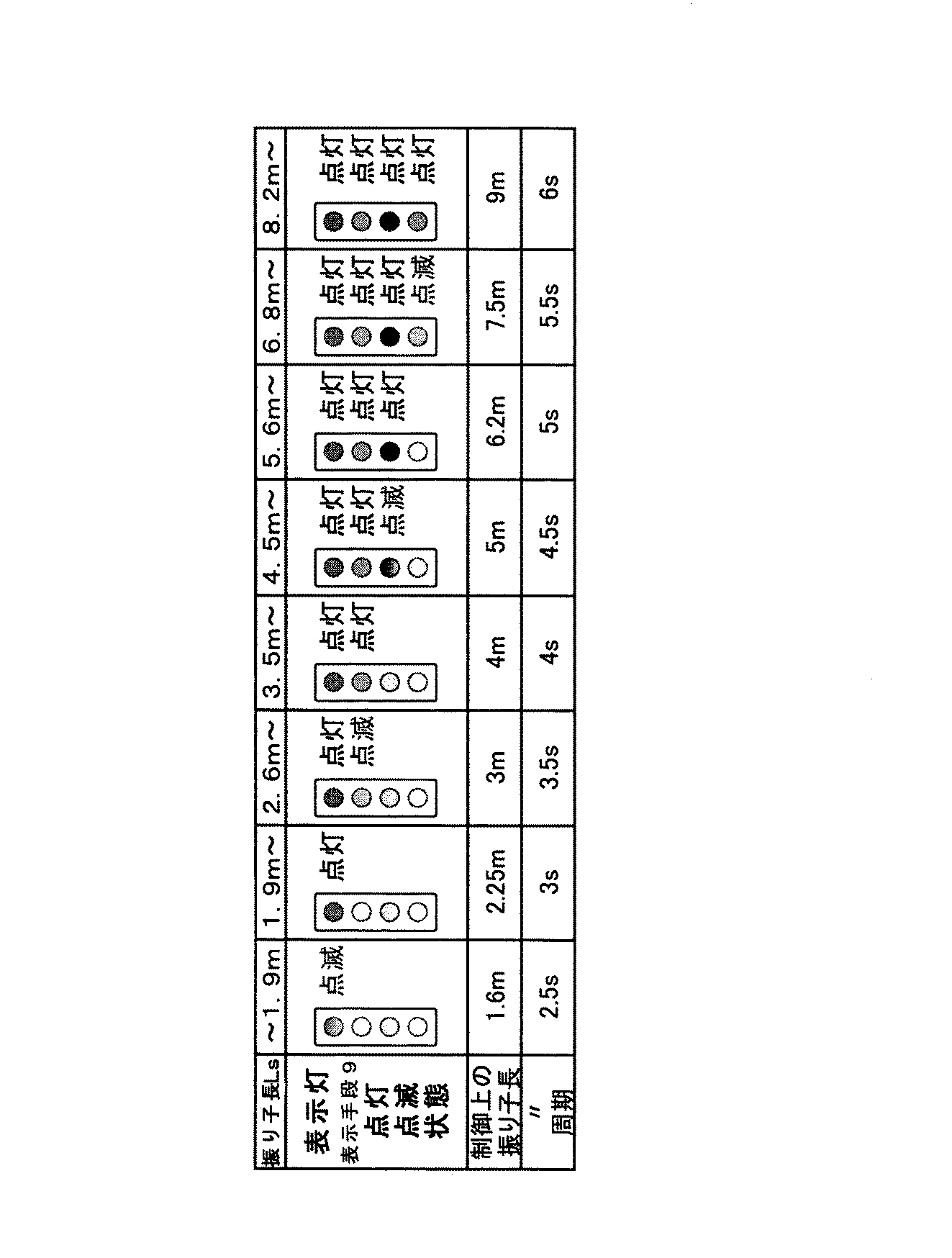
このとき、図3に示すように、制御用ロープ長である振り子長Lsに応じて、表示灯の点灯、消灯及び点滅状態が組み合わせて表示されるようにしている。
2.吊下具5を上限まで巻き上げ
吊下具5を上限まで巻き上げ、振り子の支点位置となる巻上装置3のロープ4の巻き出し位置G0から吊下具5の重心位置Gfまでの第1の距離Lfを所定値、図1の例では実測値1.5mにプリセットする。
既に上限にあり、それ以上巻き上げることができない場合は、一旦巻き下げてから巻き上げるようにする。
3.第2の距離Lw(玉掛け長さ)の設定
吊下具5に玉掛けロープ6を介して吊り下げられる吊荷7が搬送毎に変わる場合、荷姿や玉掛け条件により、振り子長Lsのうち吊下具5の重心位置Gfから玉掛けロープ6を介して吊り下げられた吊荷7の重心位置Gwまでの第2の距離Lw(玉掛け長さ)を、吊荷7の搬送毎に設定(補正)する。
押釦A又は押釦Bを2秒以上長押しすると、1秒毎に0.1m増減する。
これにより、設定(補正)された制御用ロープ長である振り子長Lsは、図3に示すように、表示灯の点灯、消灯及び点滅状態が組み合わせて表示される。
例(1):吊下具5のみの場合は、上限まで巻き上げた後に、押釦Aを長押しする。第1の表示灯のみが点滅するので、3秒間待って押釦Aの操作を解除する。
例(2):吊荷7がある場合は、振り子の支点位置となる巻上装置3のロープ4の巻き出し位置G0から床までの距離Ls(図1の例では実測値9.7m)から、床からの吊荷7の重心位置Gwまでの距離hを引くと、正確な振り子長Lsが求められるので、表示灯の点灯状態を確認し、必要に応じて、押釦A又は押釦Bを長押しして、振り子長Lsを合わせることができる。
図1の例では、表示灯の上から3つが点灯の場合は、振り子長Lsの設定値が、5.6〜6.8mであり、実際の床からの吊荷7の重心位置Gwまでの距離hが2.0mとすると、正確な振り子長Lsは、9.7−2.0=7.7mであるので、押釦Bを長押しし、一番下の表示灯が点滅してから9秒間待って押釦Aの操作を解除することで、振り子長Lsの設定値を増加させるようにする。
ここで、吊下具5の重心位置Gfから玉掛けロープ6を介して吊り下げられた吊荷7の重心位置Gwまでの第2の距離Lw(玉掛け長さ)について、設定ミスの防止等を目的として、想定される最小値及び最大値並びに初期値(最頻値)を予め設定しておくことができるようにしている。図1の例では、最小値を0m、最大値を5m、初期値を2mとしており、これにより、作業員による補正操作の手間を軽減するとともに、設定ミスを未然に防止できるようにしている。
4.作業員によりクレーンの運転操作、すなわち、横行、走行、巻き上下を操作しながら、振れ止め制御ありでの運転操作
第1の距離Lf及び第2の距離Lwを合算して算出された振り子長Lsは、クレーンの振れ止め制御装置に入力され、この振り子長Lsに基づいて決定した搬送速度パターンによって、クレーンを運転することで、確実に荷振れを抑制することができる。
巻き上下を繰り返すと、ロープのすべり等の影響を受け、振り子の支点位置となる巻上装置3のロープ4の巻き出し位置G0から吊下具5の重心位置Gfまでの第1の距離Lfの誤差が大きくなり、荷振れが大きくなってくるので、この場合は、吊下具5を上限まで巻き上げ、振り子の支点位置となる巻上装置3のロープ4の巻き出し位置G0から吊下具5の重心位置Gfまでの第1の距離Lfを所定値、前述のように、1.5mにリセットする。
5.振れ止め制御なしに切替
2個の押釦A、Bを同時に、例えば、5秒以上長押しすることによって、振れ止め制御のON−OFFの設定を行い、振れ止め制御なしにする。
振れ止め制御なしに切り替わると、例えば、クレーンの運転室階段下に取り付けた表示灯がすべて消灯する。
2 トロリ
3 巻上装置
4 ロープ
5 吊下具(フック)
6 玉掛けロープ
7 吊荷
8 入力手段(携帯操作器)
9 表示手段(表示器)
G0 ロープの巻き出し位置(振り子の支点位置)
Gf 吊下具の重心位置
Gw 吊荷の重心位置
Ls 振り子長
Lf 第1の距離
Lw 第2の距離
Claims (3)
- 走行レールに沿って走行するガーダーと、該ガーダーに沿って横行するトロリと、該トロリに搭載された巻上装置と、該巻上装置にロープを介して取り付けられた吊下具とを有するクレーンの振れ止め制御に用いる振り子長の設定装置において、
前記巻上装置のロープの巻き出し位置から吊下具の重心位置までの第1の距離を特定するロープ長検出手段と、
前記吊下具の重心位置から玉掛けロープを介して吊り下げられた吊荷の重心位置までの第2の距離を入力するための入力手段と、
前記第1の距離及び第2の距離を合算して算出される振り子長を可視的に表示する表示手段とを備えてなることを特徴とするクレーンの振れ止め制御に用いる振り子長の設定装置。 - 前記入力手段が、携帯操作器に設けられる押釦を用いてなることを特徴とする請求項1に記載のクレーンの振れ止め制御に用いる振り子長の設定装置。
- 前記表示手段が、振り子長に応じて、表示灯の点灯、消灯及び点滅状態を組み合わせて表示するものからなることを特徴とする請求項1に記載のクレーンの振れ止め制御に用いる振り子長の設定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017096320A JP6791806B2 (ja) | 2017-05-15 | 2017-05-15 | クレーンの振れ止め制御に用いる振り子長の設定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017096320A JP6791806B2 (ja) | 2017-05-15 | 2017-05-15 | クレーンの振れ止め制御に用いる振り子長の設定装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020168897A Division JP6810297B2 (ja) | 2020-10-06 | 2020-10-06 | クレーンの振れ止め制御に用いる振り子長の設定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018193152A true JP2018193152A (ja) | 2018-12-06 |
| JP6791806B2 JP6791806B2 (ja) | 2020-11-25 |
Family
ID=64569794
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017096320A Active JP6791806B2 (ja) | 2017-05-15 | 2017-05-15 | クレーンの振れ止め制御に用いる振り子長の設定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6791806B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023119137A (ja) * | 2022-02-16 | 2023-08-28 | 富士電機株式会社 | 制御装置、及び制御方法 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6077089A (ja) * | 1983-09-30 | 1985-05-01 | 住友金属工業株式会社 | クレ−ンの吊荷揺れ止め制御方法 |
| JPH0391488U (ja) * | 1989-12-28 | 1991-09-18 | ||
| JPH0577186U (ja) * | 1992-03-30 | 1993-10-19 | 前田建設工業株式会社 | 無線操縦式門型クレーン装置 |
| JPH0740675U (ja) * | 1993-12-27 | 1995-07-21 | 石川島運搬機械株式会社 | 巻きドラム用操作装置 |
| JPH07206385A (ja) * | 1994-01-25 | 1995-08-08 | Komatsu Mec Corp | ロープ巻取り、繰出し検出装置 |
| JPH08157181A (ja) * | 1994-12-02 | 1996-06-18 | Meidensha Corp | クレーンの振れ止め制御方法 |
| US5960969A (en) * | 1996-01-26 | 1999-10-05 | Habisohn; Chris Xavier | Method for damping load oscillations on a crane |
| JP2000506479A (ja) * | 1995-10-12 | 2000-05-30 | ジオテック・クレイン・コントロールズ・インコーポレーテッド | コンテナクレーン及びその他の同様のクレーンの制御及び作動方法並びにその装置 |
| JP2016166054A (ja) * | 2015-03-09 | 2016-09-15 | 株式会社北川鉄工所 | クライミングクレーンの可変制御方法 |
| JP2017026702A (ja) * | 2015-07-17 | 2017-02-02 | ヤマハ株式会社 | 表示装置 |
-
2017
- 2017-05-15 JP JP2017096320A patent/JP6791806B2/ja active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6077089A (ja) * | 1983-09-30 | 1985-05-01 | 住友金属工業株式会社 | クレ−ンの吊荷揺れ止め制御方法 |
| JPH0391488U (ja) * | 1989-12-28 | 1991-09-18 | ||
| JPH0577186U (ja) * | 1992-03-30 | 1993-10-19 | 前田建設工業株式会社 | 無線操縦式門型クレーン装置 |
| JPH0740675U (ja) * | 1993-12-27 | 1995-07-21 | 石川島運搬機械株式会社 | 巻きドラム用操作装置 |
| JPH07206385A (ja) * | 1994-01-25 | 1995-08-08 | Komatsu Mec Corp | ロープ巻取り、繰出し検出装置 |
| JPH08157181A (ja) * | 1994-12-02 | 1996-06-18 | Meidensha Corp | クレーンの振れ止め制御方法 |
| JP2000506479A (ja) * | 1995-10-12 | 2000-05-30 | ジオテック・クレイン・コントロールズ・インコーポレーテッド | コンテナクレーン及びその他の同様のクレーンの制御及び作動方法並びにその装置 |
| US5960969A (en) * | 1996-01-26 | 1999-10-05 | Habisohn; Chris Xavier | Method for damping load oscillations on a crane |
| JP2016166054A (ja) * | 2015-03-09 | 2016-09-15 | 株式会社北川鉄工所 | クライミングクレーンの可変制御方法 |
| JP2017026702A (ja) * | 2015-07-17 | 2017-02-02 | ヤマハ株式会社 | 表示装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023119137A (ja) * | 2022-02-16 | 2023-08-28 | 富士電機株式会社 | 制御装置、及び制御方法 |
| JP7823423B2 (ja) | 2022-02-16 | 2026-03-04 | 富士電機株式会社 | 制御装置、及び制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6791806B2 (ja) | 2020-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6810297B2 (ja) | クレーンの振れ止め制御に用いる振り子長の設定装置 | |
| CN102774757B (zh) | 工程机械 | |
| FI126578B (fi) | Menetelmä nostolaitteen ohjaamiseksi, nostolaitteen ohjausjärjestelmä, nostolaitejärjestelmä, tietokoneohjelma ja nostolaitteen päivitysyksikkö | |
| CN101830388B (zh) | 一种电梯对重架的安装方法 | |
| JP6791806B2 (ja) | クレーンの振れ止め制御に用いる振り子長の設定装置 | |
| JP6113342B1 (ja) | 天井クレーンにおける吊り上げ位置調整装置 | |
| JP2021001081A5 (ja) | ||
| JP2004244151A (ja) | クレーンの吊下げ長さ測定方法及び装置 | |
| JPH107380A (ja) | 玉掛バランスチェック装置 | |
| KR101908634B1 (ko) | 레이저 포인트를 이용한 오버헤드 크레인의 작업위치 조정방법 | |
| JP2000351548A (ja) | エレベータの乗客救出運転装置及び乗客救出運転方法 | |
| JP5694095B2 (ja) | 天井クレーン | |
| CN116408441B (zh) | 一种铁水包自动倾翻装置及其定量倾翻控制系统 | |
| JP2001341972A (ja) | リフティングマグネット吊具とその水平制御方法 | |
| JP7405651B2 (ja) | 電動巻上機における吊荷の着床制御方法 | |
| JP2004155538A (ja) | 吊り治具 | |
| JP3593861B2 (ja) | 天井クレーンのフック位置表示装置 | |
| TWI572548B (zh) | 防止擺盪的天車控制裝置及方法 | |
| JP5121023B2 (ja) | クレーン装置 | |
| JPH0754492A (ja) | 外装カーテンウォールの取付け昇降架台の計測制御装置 | |
| JP2005145599A (ja) | クレーン玉掛けバランス表示による安全装置 | |
| KR20210096786A (ko) | 수평 조절이 가능한 호이스트 크레인 시스템. | |
| CN107253667A (zh) | 一种具有称重功能的起重机用小车 | |
| CN112476388B (zh) | 一种龙门钩组合存放装置及使用方法 | |
| CN213771100U (zh) | 一种使用便捷的安全性高的塔式起重机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200916 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200918 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201006 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201104 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201105 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6791806 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |