(第1実施形態)
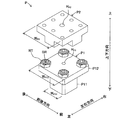
本発明の第1実施形態に係るパレット搬送装置1について説明する。パレット搬送装置1は、図1A及び図1Bに示すように、複数のパレットPを長方形の搬送路Rに沿って一定の方向(例えば、パレット搬送装置1の平面視において左回り)に循環させる。以下の説明において、鉛直方向を上下方向と呼ぶ。また、搬送路Rにおける長辺方向を左右方向と呼び、搬送路Rにおける短辺方向を前後方向と呼ぶ。
パレットPは、図2A及び図2Bに示すように、台座部P1及びヘッド部P2を有する。台座部P1は、基部P11とフランジ部P12とを有する。基部P11は、略立方体形状を呈する。基部P11における隣り合う2つの側面部同士の交差部(稜線部)が面取りされている。ただし、前記交差部の上端部は面取りされていない。すなわち、前記隣り合う2つの側面部の上端部は直交している。基部P11の上面における中央部にはネジ孔HP1が設けられている。
フランジ部P12は、基部P11の側面部における上端部から水平方向(上下方向に垂直な方向)に突出している。パレットPの平面視において、フランジ部P12の外周部は、略正方形を呈する。フランジ部P12の周端面は、基部P11の側面と平行である。フランジ部P12の周端面のうちの隣り合う2つの周端面同士の交差部(稜線部)は面取りされている。フランジ部P12の角部には、上下方向に貫通するネジ孔HP12がそれぞれ形成されている(図2B参照)。ネジ孔HP12にボールローラーBRが組み付けられている。ボールローラーBRは、円柱状に形成された本体部BR1を有する。本体部BR1の外周面には、ネジ孔HP12に対応したネジ部が設けられている。本体部BR1の下端面には、凹部が設けられており、この凹部にボールBR2が嵌め込まれている。ボールBR2は、本体部BR1の下端面から少し突出している。また、本体部BR1の上端面には、六角穴が設けられている。この六角穴に図示しない六角レンチが挿入され、この六角レンチを用いて、ネジ孔HP12にボールローラーBRが螺合される。ボールBR2がフランジ部P12の下面から少し下方へ突出する程度までボールローラーBRがネジ孔HP12内に進入した状態において、本体部BR1の上端部は、フランジ部P12の上面から上方へ少し突出している。本体部BR1の上端部にナットNTが締結されて、ボールローラーBRがフランジ部P12に固定される。
ヘッド部P2は、板状に形成されている。パレットPの平面視において、ヘッド部P2は、略正方形を呈する。ヘッド部P2の1辺の寸法WP2は、フランジ部P12の外周部の1辺の寸法WP12と略同一である。ヘッド部P2には、上下方向に貫通する複数の孔HP2が形成されている。ヘッド部P2の中央に設けられた孔HP2に、図示しないボルトが挿入され、そのボルトの先端が台座部P1(基部P11)のネジ孔HP1に螺合される。これにより、ヘッド部P2が台座部P1の上面に固定される。なお、ヘッド部P2の下面の角部と台座部P1のナットNTとが干渉しないように、ヘッド部P2の下面の角部に切り欠き(ナットNTが収容されるスペース)が設けられている。
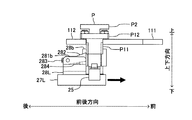
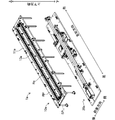
パレット搬送装置1は、パレットPの搬送路Rを構成するガイド部10と、パレットPを搬送する駆動装置20とからなる(図1A及び図1B参照)。ガイド部10は、図3に示すように、外側ガイド板11、支持部材12及び内側ガイド板13を備える。外側ガイド板11は、左右方向に延びる長方形の枠状部材である。外側ガイド板11は、左右方向に延びる前板部111及び後板部112、並びに前後方向に延びる左板部113及び右板部114からなる。前板部111、後板部112、左板部113及び右板部114の板厚方向が上下方向に一致している。後板部112は、前板部111の後方に配置されている。左板部113は、前板部111の後側の端面における左端部と、後板部112の前側の端面における左端部との間に配置されている。右板部114は、前板部111の後側の端面における右端部と、後板部112の前側の端面における右端部との間に配置されている。
外側ガイド板11の4つの角部が支柱SP11によってそれぞれ支持されている。支柱SP11は、上下方向に延設されている。支柱SP11の上端部が、外側ガイド板11の角部の下面に締結されている。支柱SP11の下端部は、後述する駆動装置20の基台BPに締結されている。
支持部材12は、支持部材12L及び支持部材12Rからなる。支持部材12L及び支持部材12Rは、後述する内側ガイド板13を支持する。支持部材12L及び支持部材12Rは、外側ガイド板11の下方に配置されている。支持部材12Lは、外側ガイド板11の左右方向における中央部と左端部との中間に位置する部分の下方に配置されている。支持部材12Rは、外側ガイド板11の左右方向における中央部と右端部との中間に位置する部分の下方に配置されている。支持部材12L及び支持部材12Rの構成は同一であるので、以下、支持部材12Lの構成について説明し、支持部材12Rの説明は省略する。
図3に示すように、支持部材12Lは、支持板121及び3本の支柱SP121F,SP121R,SP121Cを有する。支持板121は、前後方向に延設されている。支持板121の板厚方向が上下方向に一致している。
支柱SP121F,SP121R,SP121Cは、上下方向に延設されている。支柱SP121F,SP121R,SP121Cの構成は同一である。支柱SP121F,SP121R,SP121Cの上下方向の寸法は、パレットPの上下方向の寸法よりも少し大きい。支持板121の上面に支柱SP121F,SP121R,SP121Cの下端部がそれぞれ締結されている。支柱SP121F及び支柱SP121Rは、支持板121の前端部及び後端部にそれぞれ位置している。支柱SP121F及び支柱SP121Rの上端部が、外側ガイド板11の前板部111及び後板部112の下面にそれぞれ締結されている。また、支柱SP121Cは、支持板121の前後方向における中央部に位置している。支持部材12Lの支柱SP121Cと、支持部材12Rの支柱SP121Cによって、次に説明する内側ガイド板13が支持されている。
内側ガイド板13は、外側ガイド板11の内側に配置されている。内側ガイド板13は、左右方向に延びる長方形の板部材である。内側ガイド板13の板厚方向が上下方向に一致している。内側ガイド板13の上面の高さ(上下方向の位置)と外側ガイド板11の上面の高さが一致している。内側ガイド板13の外周面と、外側ガイド板11の内周面とが離間している。内側ガイド板13の外周面と外側ガイド板11の内周面との距離Δdは、パレットPの基部P11の1辺の寸法WP11(図2A参照))と同等である。ガイド部10の上方から、外側ガイド板11と内側ガイド板13との間に、パレットPの基部P11が挿入される。パレットPのフランジ部P12が外側ガイド板11及び内側ガイド板13の上面に当接して支持される。詳しくは後述するように、パレットPは、駆動装置20によって駆動され、外側ガイド板11及び内側ガイド板13にガイドされて移動する。つまり、外側ガイド板11と内側ガイド板13との間に形成された長方形の空間が、パレットPの搬送路Rである(図1B参照)。
なお、前板部111、後板部112、左板部113及び右板部114の長手方向における両端部の上面、及び内側ガイド板13の長手方向における両端部の上面には、浅い凹部RPが設けられている。搬送路の角部に移動したパレットPのボールローラーBRが凹部RPに嵌合することにより、パレットPの移動が一時的に規制される。言い換えれば、パレットPの位置ずれが防止される。
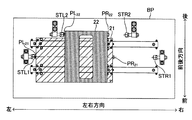
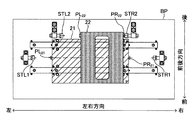
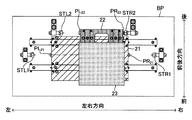
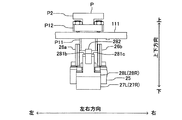
つぎに、駆動装置20の構成について説明する。駆動装置20は、図4に示すように、基台BP、第1テーブル21、第2テーブル22及び第3テーブル23を備える。駆動装置20の平面視において、基台BPは左右方向に延びる長方形を呈する。基台BPの上面には、前後一対のスライドレールユニットSL1,SL1が組み付けられている。スライドレールユニットSL1は、左右方向に延設されている。スライドレールユニットSL1は、レール部SL11と、ブロック部SL12,SL12とからなる。レール部SL11は、左右方向に延設されている。ブロック部SL12は、略直方体状に形成されている。ブロック部SL12の下面には、左右方向に延びる溝部が形成されており、この溝部にレール部SL11が嵌合している。ブロック部SL12は、レール部SL11に沿って左右方向にスライド可能である。
基台BPの前端部には、アクチュエータACが取り付けられている。アクチュエータACは、エアシリンダ装置である。すなわち、アクチュエータACは、左右方向に延びるシリンダAC1とロッドAC2とを備える。ロッドAC2の左端部がシリンダAC1内に挿入されている。シリンダAC1内に圧縮空気が導入され、ロッドAC2の左端部が前記圧縮空気によって押圧されて、ロッドAC2が左右方向に移動する。
ブロック部SL12の上面に第1テーブル21が締結される。第1テーブル21は、アクチュエータACのロッドAC2の先端に締結されており、アクチュエータACによって駆動されて、基台BPに対して左右方向にスライドする。第1テーブル21は、左右方向に延びる長方形の板部材である。第1テーブル21の板厚方向が上下方向に一致している。第1テーブル21の左右方向の寸法は、レール部SL11の左右方向の寸法よりも小さい。第1テーブル21の左右の端面には、凸部PL21,PR21がそれぞれ形成されている。基台BPの左端部には、第1テーブル21の凸部PL21に当接して、第1テーブル21の左方へのスライドを規制するストッパーSTL1が設けられている(図5A参照)。また、基台BPの右端部には、第1テーブル21の凸部PR21に当接して、第1テーブル21の右方へのスライドを規制するストッパーSTR1が設けられている(図5C参照)。
第1テーブル21の上面には、前後一対のスライドレールユニットSL2,SL2が組み付けられている。スライドレールユニットSL2の構成は、スライドレールユニットSL1の構成と略同一である。スライドレールユニットSL2は、レール部SL21と、ブロック部SL22,SL22とからなる。レール部SL21は、左右方向に延設されている。レール部SL21は、レール部SL11よりも短い。ブロック部SL22の構成は、ブロック部SL12と同一である。
ブロック部SL22の上面に第2テーブル22が締結される。第2テーブル22は、第1テーブル21に対して左右方向にスライド可能である。第2テーブル22は、略正方形の板部材である。第2テーブル22の板厚方向が上下方向に一致している。第2テーブル22の1辺の寸法は、レール部SL21の左右方向の寸法よりも小さい。第2テーブル22の後端面は、第1テーブル21の後端面よりも後方に位置している。第2テーブル22の中央部には、前後方向に延びる略長方形の貫通孔H22が形成されている。第2テーブル22の左右の端面における後端部には、凸部PL22,PR22がそれぞれ形成されている。基台BPには、第2テーブル22の凸部PL22に当接して、第2テーブル22の左方へのスライドを規制するストッパーSTL2が設けられている(図5A参照)。また、基台BPには、第2テーブル22の凸部PR22に当接して、第2テーブル22の右方へのスライドを規制するストッパーSTR2が設けられている(図5B参照)。ストッパーSTL2は、ストッパーSTL1の後方且つ右方に配置され、ストッパーSTR2は、ストッパーSTR1の後方且つ左方に配置されている。したがって、基台BPに対する第2テーブル22の可動範囲は、基台BPに対する第1テーブル21の可動範囲よりも狭い。なお、ストッパーSTL1とストッパーSTL2との左右方向の距離と、ストッパーSTR1とストッパーSTR2との左右方向の距離とが同一である。
図5Aに示すように、第2テーブル22がストッパーSTR2から離間した状態で、第1テーブル21が右方へスライドすると、第2テーブル22は第1テーブル21とともに右方へスライド可能である。すなわち、第1テーブル21と第2テーブル22とは、相対的にはスライドしない。そして、図5Bに示すように、第2テーブル22の右方へのスライドがストッパーSTR2によって規制されても、第1テーブル21は、さらに右方へスライド可能である。すなわち、第1テーブル21と第2テーブル22とが相対的にスライドする。そして、図5Cに示すように、第1テーブル21がストッパーSTR1に当接して停止する。つぎに、第1テーブル21が左方へスライドすると、第2テーブル22は第1テーブル21とともに左方へスライド可能である。すなわち、第1テーブル21と第2テーブル22とは、相対的にはスライドしない。そして、図5Dに示すように、第2テーブル22の左方へのスライドがストッパーSTL2によって規制されても、第1テーブル21は、さらに左方へスライド可能である。すなわち、第1テーブル21と第2テーブル22とが相対的にスライドする。そして、図5Aに示すように、第1テーブル21がストッパーSTL1に当接して停止する。
第2テーブル22の上面には、左右一対のスライドレールユニットSL3,SL3が組み付けられている。スライドレールユニットSL3の構成は、スライドレールユニットSL1の構成と略同一である。スライドレールユニットSL3は、レール部SL31と、ブロック部SL32とからなる。スライドレールユニットSL1は、2つのブロック部SL12を有しているが、スライドレールユニットSL3は、1つのブロック部SL32を有している。レール部SL31は、前後方向に延設されている。レール部SL31の長さは、第2テーブル22の1辺の寸法と略同一である。ブロック部SL32の構成は、ブロック部SL12と同一である。
ブロック部SL32,SL32の上面に第3テーブル23が締結される。第3テーブル23は、第2テーブル22に対して前後方向にスライド可能である。第3テーブル23は、略正方形の板部材である。第3テーブル23の板厚方向が上下方向に一致している。第3テーブル23の1辺の寸法は、レール部SL21の左右方向の寸法よりも小さい。
上記のように、第1テーブル21と第2テーブル22とは相対的に左右方向にスライド可能である。また、第2テーブル22と第3テーブル23とは相対的に前後方向にスライド可能である。第2テーブル22に対して第1テーブル21を相対的に左右方向へスライドさせる駆動力を、第2テーブル22に対して第3テーブル23を前後方向へスライドさせる駆動力に変換する駆動力伝達機構24が駆動装置20に設けられている。
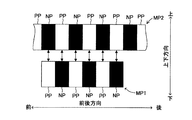
駆動力伝達機構24は、図6に示すように、上下一対のラック241,242を備える。下側のラック241は、ケースCA1を有する。ケースCA1は、左右方向に延設され、且つ上方へ開放された箱状に形成されている。このケースCA1に、磁気プレートMP1が収容されている。磁気プレートMP1は、長方形の板状に形成されている。磁気プレートMP1は、左右方向に延設されている。磁気プレートMP1は、その長手方向(左右方向)に沿って配列された複数の磁極部を有する。具体的には、正の磁極を有する正極部PPと、負の磁極を有する負極部NPとが、左右方向に交互に配列されている。図7に示すように、正極部PP及び負極部NPは、磁気プレートMP1の長手方向に対して傾斜した方向に延設されている。磁気プレートMP1の長手方向に対する正極部PP及び負極部NPの延設方向の角度は、45°である。なお、図7においては、ラック241のケースCA1を省略している。
上側のラック242の構成は、下側のラック241の構成と同様である。ただし、その向きがラック241とは異なる。すなわち、ラック241が左右方向に延設されているのに対し、ラック242は前後方向に延設されている(図6参照)。ラック242は、ラック241のケースCA1及び磁気プレートMP1と同様のケースCA2及び磁気プレートMP2を備えている。ケースCA2と磁気プレートMP2は、前後方向に延設されている。また、ケースCA2は、下方へ開放されている。このケースCA2に、磁気プレートMP2が収容されている。磁気プレートMP2は、長方形の板状に形成されている。磁気プレートMP2は、その長手方向(前後方向)に沿って配列された複数の磁極部を有する。具体的には、正の磁極を有する正極部PPと、負の磁極を有する負極部NPとが、前後方向に交互に配列されている。図7に示すように、正極部PP及び負極部NPは、磁気プレートMP2の長手方向に対して傾斜した方向に延設されている。磁気プレートMP2の長手方向に対する正極部PP及び負極部NPの延設方向の角度は、45°である。駆動力伝達機構24の平面視において、磁気プレートMP1の正極部PP及び負極部NPの延設方向と、磁気プレートMP1の正極部PP及び負極部NPの延設方向とが平行である。なお、図7においては、ラック242のケースCA2を省略している。
ここで、図7に示すように、ラック241の左右方向のスライドのみが許容され、且つラック242の前後方向のスライドのみが許容されている状態を想定する。磁気プレートMP1の正極部PP(負極部NP)と磁気プレートMP2の負極部NP(正極部PP)とが引き合うため、自然状態において、図8A及び図8Cに示すように、磁気プレートMP1の正極部PPの直上に磁気プレートMP2の負極部NPが位置し、磁気プレートMP1の負極部NPの直上に磁気プレートMP2の正極部PPが位置する。すなわち、磁気プレートMP1の正極部PP(負極部NP)と磁気プレートMP2の負極部NP(正極部PP)とが上下方向に正対している。なお、図8A乃至図8Dにおいて、正極部PPを白色で示し、負極部NPを黒色で示す。図8B及び図8Dに示すように、自然状態から磁気プレートMP1が少し右方(図8Cにおいては、紙面の表面側)へスライドすると、磁気プレートMP1の正極部PP及び負極部NPが、磁気プレートMP2の負極部NP及び正極部PPに対して少し後方へずれた状態になる。すると、磁気プレートMP2の負極部NP及び正極部PPが、磁気プレートMP1の正極部PP及び負極部NPに引き寄せられる。これにより、ラック242が少し後方へ移動し、磁気プレートMP1の正極部PP(負極部NP)と磁気プレートMP2の負極部NP(正極部PP)とが上下方向に正対する。
一方、図8A及び図8Cに示す状態から、磁気プレートMP1が少し左方(図8Dにおていは、紙面の裏面側)へスライドすると、磁気プレートMP1の正極部PP及び負極部NPが、磁気プレートMP2の負極部NP及び正極部PPに対して少し前方へずれた状態になる。すると、磁気プレートMP2の負極部NP及び正極部PPが、磁気プレートMP1の正極部PP及び負極部NPに引き寄せられる。これにより、ラック242が少し前方へ移動し、磁気プレートMP1の正極部PP(負極部NP)と磁気プレートMP2の負極部NP(正極部PP)とが上下方向に正対する。
上記のような原理に基づいてラック242に対してラック241aを左方へスライドさせる駆動力が、ラック241に対してラック242を前方にスライドさせる駆動力に変換される。ラック242に対してラック241を右方へスライドさせる駆動力が、ラック241に対してラック242を後方にスライドさせる駆動力に変換される。ラック241に対するラック242の前後方向の移動距離は、ラック242に対するラック241の左右方向の移動距離と同一である。
上記のように構成された駆動力伝達機構24のラック241が第1テーブル21の上面に取り付けられている(図4参照)。また、ラック242が第3テーブル23の下面に、上下方向に延びる支柱SP23を介して取り付けられている(図9参照)。支柱SP23は、第3テーブル23の下面から、第2テーブル22の貫通孔H22を通って、第2テーブル22の下面より少し下方まで延設されている。その支柱SP23の下端部にラック242が取り付けられている。このように、ラック242が第3テーブル23の下面から吊り下げられることにより、ラック241とラック242とが近接配置される。なお、つぎに説明するように、第3テーブル23は第2テーブル22に対して前後方向に移動するが、支柱SP23が第2テーブル22の貫通孔H22の内周面のうちの前側部分に当接して、第3テーブル23の前方への移動が規制される。また、支柱SP23が第2テーブル22の貫通孔H22の内周面のうちの後側部分に当接して、第3テーブル23の後方への移動が規制される。
つぎに、第1テーブル21、第2テーブル22及び第3テーブル23の移動について説明する。まず、図10Aに示すように、第1テーブル21が、その可動範囲の左端に位置し、第2テーブル22が、その可動範囲の左端に位置しており、且つ第3テーブル23が、その可動範囲の前端に位置している。この状態において、磁気プレートMP1の正極部PP(負極部NP)と磁気プレートMP2の負極部NP(正極部PP)とが互いに引き合い、上下方向に正対している。アクチュエータACによって第1テーブル21が右方へスライドさせられると、第2テーブル22は、第1テーブル21のスライドに伴って、右方へスライドする。すなわち、第2テーブル22は、基台BPに対して右方へスライドするが、第1テーブル21に対して、第2テーブル22は静止している。よって、ラック242に対してラック241は静止している。したがって、第3テーブル23は第2テーブル22に対して静止している。
図10Bに示すように、第2テーブル22の凸部PR22がストッパーSTR2に当接すると、基台BPに対する第2テーブル22の右方への移動が規制される。図10Aの状態から図10Bの状態に至るまでの各テーブルの右方への移動距離は、ヘッド部P2の1辺の寸法WP2(図2A参照)の1.5倍である。
第2テーブル22の右方へのスライドが規制されたとしても、第1テーブル21は、さらに右方へスライドする。第2テーブル22の右方へのスライドが規制されることにより、第3テーブル23の右方へのスライドが規制されている。したがって、第3テーブル23に対して、第1テーブル21が右方へスライドしている。すなわち、ラック242に対してラック241が右方へスライドしている。そのため、第3テーブル23に対する第1テーブル21の右方への移動距離と同じ距離だけ、第1テーブル21に対して第3テーブル23が後方へスライドする。
図10Cに示すように、第1テーブル21の凸部PR21がストッパーSTR1に当接すると、基台BPに対する第1テーブル21の右方へのスライドが規制される。図10Bの状態から図10Cの状態に至るまでの第1テーブル21の右方への移動距離及び第3テーブル23の後方への移動距離は、ヘッド部P2の1辺の寸法WP2の1.5倍である。なお、図10Cの状態において、第3テーブル23は、その可動範囲の後端に達している。
つぎに、図10Cに示す状態から、アクチュエータACによって第1テーブル21が左方へスライドさせられると、第2テーブル22は、第1テーブル21のスライドに伴って、左方へスライドする。すなわち、第2テーブル22は基台BPに対して左方へスライドするが、第1テーブル21に対して、第2テーブル22は静止している。よって、ラック242に対してラック241は静止している。したがって、第3テーブル23は第2テーブル22に対して静止している。
図10Dに示すように、第2テーブル22の凸部PL22がストッパーSTL2に当接すると、基台BPに対する第2テーブル22の左方へのスライドが規制される。図10Cの状態から図10Dの状態に至るまでの各テーブルの左方への移動距離は、ヘッド部P2の1辺の寸法WP2の1.5倍である。
第2テーブル22の左方へのスライドが規制されたとしても、第1テーブル21は、さらに左方へスライドする。第2テーブル22の左方へのスライドが規制されることにより、第3テーブル23の左方へのスライドが規制されている。したがって、第3テーブル23に対して、第1テーブル21が左方へスライドしている。すなわち、ラック242に対してラック241が左方へスライドしている。そのため、第3テーブル23に対する第1テーブル21の左方への移動距離と同じ距離だけ、第1テーブル21に対して第3テーブル23が前方へスライドする。
図10Aに示すように、第1テーブル21の凸部PL21がストッパーSTL1に当接すると、基台BPに対する第1テーブル21の左方へのスライドが規制される。図10Dの状態から図10Aの状態に至るまでの第1テーブル21の左方への移動距離及び第3テーブル23の前方への移動距離は、ヘッド部P2の1辺の寸法WP2の1.5倍である。
上記のように、第1テーブル21を左右方向に往復させると、第3テーブル23は矩形(本実施形態では正方形)の経路に沿って移動する。
図4及び図9に示すように、第3テーブル23の上面には、左右方向に延びるアーム25が取り付けられる。アーム25の左右の端部には、パレットPを保持する保持装置26L,26Rが取り付けられている。保持装置26L,26Rは、左右一対の保持板26a,26bをそれぞれ有する。保持板26a,26bの板厚方向が左右方向に一致している。左側の保持板26aと右側の保持板26bとの距離は、パレットPの基部P11の1辺の寸法WP1(図2A参照)より僅かに大きい。保持板26aの前端部及び後端部は左方へ少し曲げられており、保持板26bの前端部及び後端部は右方へ少し曲げられている。すなわち、保持装置26L,26Rの前端部においては、後方へ向かうに従って、保持板26aと保持板26bとの距離が徐々に小さくなっている。また、保持装置26L,26Rの後端部においては、前方へ向かうに従って、保持板26aと保持板26bとの距離が徐々に小さくなっている。詳しくは後述するように、保持板26aと保持板26bとの間に基部P11が挿入され、パレットPがアーム25の端部に保持される。
図10A乃至図10Dを用いて説明したように、第3テーブル23が矩形の経路に沿って移動すると、保持装置26L,26Rは、図11に示すように、ガイド部10の左右の端部の下方にて、矩形の経路(同図において矢印で示した経路)に沿ってそれぞれ移動する。
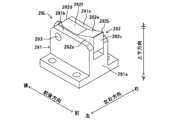
アーム25の左端部の下面には、後方へ延びる支持板27Lが取り付けられ、アーム25の右端部の下面には、前方へ延びる支持板27Rが取り付けられている(図4及び図9参照)。支持板27Lの上面及び支持板27Rの上面には、アンチバックユニット28L及びアンチバックユニット28Rがそれぞれ取り付けられている。アンチバックユニット28Lとアンチバックユニット28Rとの相違点は前後の向きが反対であるという点だけであり、その他の構成は同一である。そこで、以下、アンチバックユニット28Lの構成を説明し、アンチバックユニット28Rの説明は省略する。
アンチバックユニット28Lは、図12A及び図12Bに示すように、基部281及び爪282を備える。基部281は、前後方向に延びる直方体状の台座部281a、台座部281aの左右の端部から上方へ延びる左右一対のフランジ部281b,281cを有する。
爪282は、前後方向に延設されている。爪282は、フランジ部281bとフランジ部281bとの間に挿入されている。フランジ部281b,281cの後部に、左右方向に延びる軸部材283が組み付けられている。爪282の後部が、軸部材283のまわりに回動可能に支持されている。爪282の前端と基部281との間に隙間が形成されている。この隙間にバネ284が挿入されている。バネ284によって爪282の前端部が上方へ付勢され、爪282の後端部が台座部281aの上面に当接して、爪282の回動が規制されている。
この状態では、爪282の左右の側面282a,282bは、左右方向に垂直である。爪282の前面282c及び後面282dは、前後方向に垂直である。爪282の前部の上面282eは、その前端側が後端側よりも上方に位置するように傾斜している。爪282の後部の上面282fは、上下方向に垂直である。爪282の下面282gは、その前端側が後端側よりも上方に位置するように傾斜している。また、爪282の前端部がフランジ部281a,281bの上面から上方へ突出している。爪282の前端部に下方への外力が作用すると、バネ284の付勢力に抗して爪282が軸部材283の周りに回動する。そして、爪282の前端部がフランジ部281a,281bとの間に入り込む。
つぎに、図13A乃至図13Dを用いて、パレットPの搬送について説明する。なお、図13A乃至図13Dにおいて、保持装置26L,26Rに保持されているパレットP,Pに斜線を付している。まず、図13Aに示すように、内側ガイド板13の前側の辺に沿って、8個のパレットPが左右方向に並べられ、内側ガイド板13の後側の辺に沿って、8個のパレットPが左右方向に並べられる。左右方向に隣り合うパレットP同士が当接している。以下、ガイド部10の前側に並べられている8個のパレットPをパレット列PAFと呼び、ガイド部10の後側に並べられている8個のパレットPをパレット列PARと呼ぶ。パレット列PAFの左端及び右端のパレットP,P、並びにパレット列PARの左端及び右端のパレットP,PのボールローラーBRが、凹部RPに嵌合し、これらのパレットPの位置ずれが抑制されている。パレット列PAFのうち、左端及び右端のパレットP,Pを除く6個のパレットPのボールローラーBRが嵌合する凹部RPは設けられていないが、パレット列PAFの左端及び右端のパレットP,Pの位置ずれが抑制されることにより、前記6個のパレットPの位置ずれも抑制される。また、パレット列PARのうち、左端及び右端のパレットP,Pを除く6個のパレットPのボールローラーBRが嵌合する凹部RPは設けられていないが、パレット列PARの左端及び右端のパレットP,Pの位置ずれが抑制されることにより、前記6個のパレットPの位置ずれも抑制される。
さらに、搬送路Rの前側且つ左側の角部FLに1個のパレットPが載置される。上記のように、合計17個のパレットPがガイド部10に載置されている。
なお、内側ガイド板13の左端は、パレット列PAF,PARよりも左方に位置している。内側ガイド板13の左端とパレット列PAF,PARの左端のパレットP,Pの中心との左右方向の距離は、ヘッド部P2の1辺の寸法WP2と同一である。また、内側ガイド板13の右端は、パレット列PAF,PARよりも右方に位置している。内側ガイド板13の右端とパレット列PAF,PARの右端のパレットP,Pの中心との左右方向の距離は、ヘッド部P2の1辺の寸法WP2と同一である。パレット列PAFの前後方向の中心線CFとパレット列PARの前後方向の中心線CRとの距離は、ヘッド部P2の1辺の寸法WP2の1,5倍である。
まず、各テーブルの位置が図10Aのように設定される。すなわち、第1テーブル21が、その可動範囲の左端に位置し、第2テーブル22が、その可動範囲の左端に位置しており、且つ第3テーブル23が、その可動範囲の前端に位置している(図10A)。そして、図14に示すように、角部FLに配置されたパレットPの下端部(基部P11の下端部)が、保持装置26Lに保持され、パレット列PAFの右端のパレットPの下端部(基部P11の下端部)が、保持装置26Rに保持されている。なお、パレットPの下端面は、アンチバックユニット28L,28Rのフランジ部281b,281cの上面よりも少し上方に位置している。アンチバックユニット28Lは、角部FLに配置されたパレットPの基部P11の後方に位置している。また、アンチバックユニット28Rは、パレット列PAFの右端のパレットPの基部P11の前方に位置している。アンチバックユニット28Lの爪282が、角部FLに配置されたパレットPの基部P11の後面に当接している。また、アンチバックユニット28Rの爪282が、パレット列PAFの右端のパレットPの基部P11の前面に当接している。
つぎに、アクチュエータACによって第1テーブル21が駆動され、第1テーブル21、第2テーブル22及び第3テーブル23が右方へスライドする(図10A〜図10B)。これにより、保持装置26L,26Rに保持されたパレットP,Pが右方へスライドする。つまり、パレット列PAFの右端のパレットPが右方へスライドするとともに、角部FLに配置されたパレットPが右方へスライドする。
そして、第2テーブル22の凸部PR22がストッパーSTR2に当接する(図10B)。図10Aから図10Bへの各テーブルのスライドに伴い、図13Aにおいてパレット列PAFの右端に位置していたパレットPが、図13Bに示すように、搬送路Rの前側且つ右側の角部FRへスライドする。また、図13Aにおいて角部FLに位置していたパレットPが右方にスライドして、パレット列PAFのうちの右端のパレットPを除く7個のパレットPを右方へ押し進める。前記7個のパレットPの移動距離は、ヘッド部P2の1辺の寸法WP2と同一である。前記7個のパレットPと、角部FLからスライドした1つのパレットPとによって新たなパレット列PAFが構成される。
つぎに、第2テーブル22の右方へのスライドが規制された状態で第1テーブル21がさらに右方へスライドすることにより、第3テーブル23が後方へスライドする(図10B〜図10C)。これにより、保持装置26Rに保持されているパレットP(図13Bにおいて角部FRに位置するパレットP)が、アンチバックユニット28Rの爪282に押されて、後方へスライドする(図15参照)。一方、保持装置26Lに保持されているパレットP(図13Bにおけるパレット列PAFの左端のパレットP)はその位置に留まり、保持装置26Lが後方へ移動する(図16参照)。アンチバックユニット28Lの爪282の上面282eが、パレット列PARの左端のパレットPの下部に当接して、爪282の前端部が下方へ押される。これにより爪282が回動し、爪282の前端部がフランジ部281a,281bとの間に入り込む。そのため、アンチバックユニット28Lの後方への移動が規制されない。アンチバックユニット28Lがパレット列PARの左端のパレットPの基部P11よりも後方へ移動すると、爪282がバネ284の付勢力により元の位置(図12B)に戻り、爪282がパレット列PARの左端のパレットPの基部P11の後面に当接する。
そして、第1テーブル21の凸部PR21がストッパーSTR1に当接する(図10C)。図10Bから図10Cへの各テーブルのスライドに伴い、図13Bにおいて角部FRに位置していたパレットPが、図13Cに示すように、搬送路Rの後側且つ右側の角部RRへスライドする。また、パレット列PARの左端のパレットPが保持装置26Lに保持される。
つぎに、アクチュエータACによって第1テーブル21が駆動され、第1テーブル21、第2テーブル22及び第3テーブル23が左方へスライドする(図10C〜図10D)。これにより、パレット列PARの左端のパレットPが左方へスライドするとともに、角部RRのパレットPが左方へスライドする。
そして、第2テーブル22の凸部PL22がストッパーSTL2に当接する(図10D)。図10Cから図10Dへの各テーブルのスライドに伴い、図13Cにおいてパレット列PARの左端に位置していたパレットPが、搬送路Rの後側且つ左側の角部RLへスライドする。また、図13Cにおいて角部RRに位置していたパレットPが左方にスライドして、パレット列PARのうちの左端のパレットPを除く7個のパレットPを左方へ押し進める。前記7個のパレットPの移動距離は、ヘッド部P2の1辺の寸法WP2と同一である。前記7個のパレットPと、角部RRからスライドした1つのパレットPとによって新たなパレット列PARが構成される。
つぎに、第2テーブル22の左方へのスライドが規制された状態で第1テーブル21がさらに左方方へスライドすることにより、第3テーブル23が前方へスライドする(図10D〜図1A)。これにより、保持装置26Lに保持されているパレットP(図13Dにおいて角部RLに位置するパレットP)が、アンチバックユニット28Lの爪282に押されて、前方へスライドする(図17参照)。一方、保持装置26Rに保持されているパレットP(図13Dにおけるパレット列PARの右端のパレットP)はその位置に留まり、保持装置26Rが前方へ移動する(図18参照)。アンチバックユニット28Rの爪282の上面282eが、パレット列PAFの右端のパレットPの下部に当接して、爪282の前端部が下方へ押される。これにより爪282が回動し、爪282の前端部がフランジ部281a,281bとの間に入り込む。そのため、アンチバックユニット28Rの前方への移動が規制されない。アンチバックユニット28Rがパレット列PAFの右端のパレットPの基部P11よりも前方へ移動すると、爪282がバネ284の付勢力により元の位置に戻り、爪282がパレット列PAFの右端のパレットPの基部P11の前面に当接する。
そして、第1テーブル21の凸部PL21がストッパーSTR1に当接する(図10A)。図10Dから図10Aへの各テーブルのスライドに伴い、図13Dにおいて角部RLに位置していたパレットPが、角部FLへスライドする。また、パレット列PAFの右端のパレットPが保持装置26Rに保持される。すなわち、図13Aの状態に戻る。
上記のように、アクチュエータACのロッドAC2を1回往復させると、各パレットPは、それらの進行方向の前側に隣接するパレットPが載置されていた位置へスライドする。したがって、アクチュエータACのロッドを17回往復させると、各パレットPは、搬送路Rを1周して元の位置に戻る。
パレット搬送装置1によれば、1つのアクチュエータACのロッドAC2を往復させるだけで、矩形の搬送路Rに沿ってパレットPをスライドさせることができる。したがって、4個のアクチュエータを備えた上記従来のパレット搬送装置に比べて、部品コストを削減できる。よって、パレット搬送装置1を安価に提供できる。
また、駆動力伝達機構24は、ラック241(磁気プレートMP1)とラック242(磁気プレートMP2)との間に作用する磁力を用いて、ラック241を左右方向へスライドさせる駆動力を、ラック242を前後方向へスライドさせる駆動力に変換している。つまり、本実施形態では、非接触型の駆動力伝達機構24を採用している。ここで、ラックギアとピニオンギアとを用いた接触型の駆動力伝達機構を採用することも可能である。しかし、この場合、ラックギア及びピニオンギアに、定期的に潤滑油を塗布する必要がある。また、ラックギア又はピニオンギアが磨耗した場合には、それらを交換する必要がある。駆動力伝達機構24では、ラック241とラック242が接触しないので、上記のような接触型の駆動力伝達機構に必要とされるメンテナンス及び部品交換が不要である。
(第2実施形態)
つぎに、本発明の第2実施形態に係るパレット搬送装置1aについて説明する。以下、パレット搬送装置1aの構成部品のうち、第1実施形態のパレット搬送装置1の構成部品と同一である構成部品の詳細な説明を省略する。
パレット搬送装置1aは、第1実施形態と同様に、複数のパレットPaを長方形の搬送路Raに沿って一定の方向(例えば、パレット搬送装置1aの平面視において左回り)に循環させる(図19A及び図19B参照)。以下の説明において、鉛直方向を上下方向と呼ぶ。また、搬送路Raにおける長辺方向を左右方向と呼び、搬送路Raにおける短辺方向を前後方向と呼ぶ。
パレットPaは、第1実施形態のパレットPの各部の寸法を拡大(例えば2倍)した部材である。パレットPaの各部の寸法を除く他の構成は、パレットPと同一である。
パレット搬送装置1aは、パレットPaの搬送路Raを構成するガイド部10aと、パレットPaを搬送する駆動装置20aとからなる(図19B参照)。ガイド部10aは、第1実施形態のガイド部10と同様に、長方形の枠状の外側ガイド板11a、及び内側ガイド板13aを備える。外側ガイド板11aの左右方向及び前後方向の寸法が外側ガイド板11の左右方向及び前後方向の寸法より大きい。内側ガイド板13aの左右方向の寸法が内側ガイド板13の左右方向の寸法より大きい。第1実施形態と同様に、内側ガイド板13aが外側ガイド板11aの内側に配置されている。外側ガイド板11aと内側ガイド板13aとの間の空間が搬送路Raである。搬送路Raの左右方向及び前後方向の寸法は、第1実施形態の搬送路Rの左右方向及び前後方向の寸法より大きい。第2実施形態では、第1実施形態より多くのパレットPaが搬送路Raに配置され、これらが搬送路Raに沿って循環される。
外側ガイド板11aの4つの角部及長辺部の中間部が支柱SP11によってそれぞれ支持されている。支柱SP11の下端部は、後述する駆動装置20aの基台BPaに締結されている。
つぎに、駆動装置20aの構成について説明する。駆動装置20aは、図20A乃至図20Cに示すように、基台BPa、第1テーブル21a、第2テーブル22a及び第3テーブル23aを備える。駆動装置20aの平面視において、基台BPaは左右方向に延びる長方形を呈する。基台BPaの上面には、スライドレールユニットSL1が組み付けられている。スライドレールユニットSL1のレール部SL11が左右方向に延設されている。レール部SL11は、基台BPaの右半部に配置されている。レール部SL11は、基台BPaの前後方向における中央部に配置されている。
基台BPaの左半部には、アクチュエータACが取り付けられている。アクチュエータACは、基台BPaの前後方向における中央部に配置されている。つまり、駆動装置20aの平面視において、アクチュエータACとレール部SL11とが同一直線上に配置されている。
ブロック部SL12の上面に第1テーブル21a(図20B参照)が締結される。第1テーブル21aは、アクチュエータACのロッドAC2の先端に締結され、アクチュエータACによって駆動されて、基台BPaに対して左右方向にスライドする。第1テーブル21aは、左右方向に延びる長方形の板部材である。第1テーブル21aの板厚方向が上下方向に一致している。第1テーブル21aの左右方向の寸法は、レール部SL11の左右方向の寸法よりも小さい。第1テーブル21aの左右の端面には、後述する第2テーブル22aに当接して押圧する押圧子PPL21a,PPR21aが取り付けられている。また、第1テーブル21aの左右の端面には、凸部PL21a,PR21aが設けられている。基台BPaの上面であって、レール部SL11の左端の前方に位置する部分には、第1テーブル21aの凸部PL21aに当接して、第1テーブル21aの左方へのスライドを規制するストッパーSTL1が設けられている。また、基台BPaの上面であって、レール部SL11の右端の前方に位置する部分には、第1テーブル21aの凸部PR21aに当接して、第1テーブル21aの右方へのスライドを規制するストッパーSTR1が設けられている。つまり、ストッパーSTL及びストッパーSTRにより第1テーブル21aの可動範囲が規定される。
第1テーブル21aの上面には、前後一対のスライドレールユニットSL2,SL2が組み付けられている。各スライドレールユニットSL2のレール部SL21は、左右方向に延設されている。
スライドレールユニットSL2のブロック部SL22の上面に第2テーブル22aが締結される。第2テーブル22aは、第1テーブル21aに対して左右方向にスライド可能である。第2テーブル22aは、略正方形の板部材である。第2テーブル22aの板厚方向が上下方向に一致している。第2テーブル22aの1辺の寸法は、レール部SL21の左右方向の寸法よりも小さい。第2テーブル22aの中央部には、前後方向に延びる略長方形の貫通孔H22aが形成されている。また、第2テーブル22aの左右の端面には、凸部PL22a,PR22aが設けられている。第2テーブル22aの右端面における前端部及び後端部には、後述する第3テーブル23aの前後方向の可動範囲を規定するストッパーSTF22a,STR22aがそれぞれ組み付けられている。
第2テーブル22a及び基台BPaには、第2テーブル22aを基台BPaに対して一時的に固定するキャッチ機構CL及びキャッチ機構CRが組み付けられている。ここで、キャッチ機構CRの構造について説明しておく。なお、キャッチ機構CLの構造はキャッチ機構CRの構造と同一であるので、その説明を省略する。
キャッチ機構CRは、オス部材C1とメス部材C2とからなる。オス部材C1は、図21に示すように、基板部C11と、凸部C12とを有する。基板部C11は、略長方形の板状部である。凸部C12は、基板部C11の一側面における中央部から突出している。凸部C12の基端部は先端部に比べて少し細く形成されている。
メス部材C2は、略直方体状の基部C21を備える。基部C21の長手方向における中央部には、オス部材C1の凸部C12を受容する凹部C22が形成されている。凹部C22の内周部には、一対のボールC23,C23が組み付けられている。これらのボールC23,C23が、図示しないバネによって付勢され、凹部C21内に挿入された凸部C12に押し付けられる。そして、ボールC23,C23が凸部C12の基端部側の少し細く形成された部分に嵌合することにより、オス部材C1がメス部材C2に対して保持される。オス部材C1をメス部材C2から引き抜く方向へ、所定値以上の力が作用すると、ボールC23,C23を付勢しているバネが押し縮められ、ボールC23とボールC23との距離が広がり、オス部材C1がメス部材C2から離脱する。
第2テーブル22aの下面における左端部に、ブラケットBCLを介して、キャッチ機構CLのオス部材C1が組み付けられている(図20B参照)。ブラケットBCLは、第2テーブル22aの下面に組み付けられる第1壁部BCL1と、第1壁部BCL1の左端から下方へ延びる第2壁部BCL2を備える。第2壁部BCL2に、3つのオス部材C1が組み付けられている。これらの3つのオス部材C1が上下方向に並設されている。各オス部材C1の凸部C12が第2テーブル22aの左端面よりも左方へ突出している。
また、第2テーブル22aの下面における右端部に、ブラケットBCRを介して、キャッチ機構CRのオス部材C1が組み付けられている。ブラケットBCRは、第2テーブル22aの下面に組み付けられる第1壁部BCR1と、第1壁部BCR1の右端から下方へ延びる第2壁部BCR2を備える。第2壁部BCR2に、3つのオス部材C1が組み付けられている。これらの3つのオス部材C1が上下方向に並設されている。各オス部材C1の凸部C12が第2テーブル22aの右端面よりも右方へ突出している。
一方、基台BPaには、キャッチ機構CLの各オス部材C1に対応する3つのメス部材C2が組み付けられている(図20A参照)。これらのメス部材C2は、レール部SL11の延設方向における中央部と左端との中間部の前方に配置されている。これらのメス部材C2は上下方向に並設されている。これらのメス部材C2の凹部C21が右方へ向けられている。
また、基台BPaには、キャッチ機構CRの各オス部材C1に対応する3つのメス部材C2が組み付けられている。これらのメス部材C2は、レール部SL11の延設方向における中央部と右端との中間部の前方に配置されている。これらのメス部材C2は上下方向に並設されている。これらのメス部材C2の凹部C21が左方へ向けられている。
上記のように、ストッパーSTL1とストッパーSTR1の間にキャッチ機構CLのメス部材C2及びキャッチ機構CRのメス部材C2が配置されている。したがって、基台BPaにおける第2テーブル22aの可動範囲は、基台BPaにおける第1テーブル21aの可動範囲よりも狭い。なお、ストッパーSTL1とキャッチ機構CLのメス部材C2との左右方向の距離と、ストッパーSTR1とキャッチ機構CRのメス部材C2との左右方向の距離とが同一である。
つぎに、第1テーブル21aと第2テーブル22aの移動について説明する。図22Aに示すように、キャッチ機構CRのオス部材C1とメス部材C2とが嵌合し、且つ押圧子PPR21aが第2テーブル22aから離間している状態で、第1テーブル21aが、アクチュエータACによって左方へ引かれると、第1テーブル21aは、基台BPaに対して左方へスライドする。そのとき、第2テーブル22aは、キャッチ機構CRの作用により、基台BPaに対して停止している。図22Bに示すように、押圧子PPR21aが第2テーブル22aの凸部PR22aに当接し、第1テーブル21aがさらに左方へ引かれると、第2テーブル22aが押圧子PPR21aによって左方へ押され、キャッチ機構CRのオス部材C1がメス部材C2から離脱する。そして、アクチュエータACによって第1テーブル21aがさらに左方へ引かれると、第2テーブル22aが押圧子PPR21aによって左方へ押される。これにより、第1テーブル21aと第2テーブル22aとが一体的に左方へ移動する。すなわち、この過程では、第1テーブル21aと第2テーブル22aとは、相対的にはスライドしない。
図22Cに示すように、キャッチ機構CLのオス部材C1とメス部材C2とが嵌合すると、第2テーブル22aが基台BPaに対して停止する。また、その際、第1テーブル21aの凸部PL21aがストッパーSTL1に当接して、第1テーブル21aが基台BPaに対して停止する。
第1テーブル21aが、アクチュエータACによって右方へ押されると、第1テーブル21aは、基台BPaに対して右方へスライドする。そのとき、第2テーブル22aは、キャッチ機構CLの作用により、基台BPaに対して停止している。図22Dに示すように、押圧子PPL21aが第2テーブル22aの凸部PL22a面に当接し、第1テーブル21aがさらに右方へ押されると、キャッチ機構CLのオス部材C1がメス部材C2から離脱する。そして、アクチュエータACによって第1テーブル21aが右方へ押されるとともに、押圧子PPL21aによって第2テーブル22aが右方へ押される。これにより、第1テーブル21aと第2テーブル22aとが一体的に右方へ移動する。すなわち、この過程では、第1テーブル21aと第2テーブル22aとは、相対的にはスライドしない。
キャッチ機構CRのオス部材C1とメス部材C2とが嵌合すると、第2テーブル22aが基台BPaに対して停止する。また、その際、第1テーブル21aの凸部PR21aがストッパーSTR1に当接して、第1テーブル21aが基台BPaに対して停止し、第1テーブル21a及び第2テーブル22aが、図22Aの状態に戻る。
第2テーブル22aの上面には、左右一対のスライドレールユニットSL3,SL3が組み付けられている(図20B参照)。スライドレールユニットSL3,SL3のブロック部SL32,SL32の上面に第3テーブル23a(図20C参照)が締結される。第3テーブル23aは、第2テーブル22に対して前後方向にスライド可能である。第3テーブル23aは、左右方向に延びる長方形の板部材である。第3テーブル23aの板厚方向が上下方向に一致している。第3テーブル23aの右端面には、下方へ延びる係止ブロックEB23aが組み付けられている。係止ブロックEB23aがストッパーSTF22aに当接することにより、第2テーブル22aに対する第3テーブル23aの前方へのスライドが規制される。一方、係止ブロックEB23aがストッパーSTR22aに当接することにより、第2テーブル22aに対する第3テーブル23aの後方へのスライドが規制される。すなわち、ストッパーSTF22a及びストッパーSTR22aにより、第3テーブル23の可動範囲が規定される。
上記のように、第1テーブル21aと第2テーブル22aとは相対的に左右方向にスライド可能である。また、第2テーブル22aと第3テーブル23aとは相対的に前後方向にスライド可能である。第2テーブル22aに対して第1テーブル21aを相対的に左右方向へスライドさせる駆動力を、第2テーブル22aに対して第3テーブル23aを前後方向へスライドさせる駆動力に変換する駆動力伝達機構24aが駆動装置20aに設けられている。
駆動力伝達機構24aの構成は、第1実施形態の駆動力伝達機構24の構成と略同一である。すなわち、駆動力伝達機構24aは、ラック241a及びラック242aを備える。ラック241aの磁気プレートMP1aは、ラック241の磁気プレートMP1よりも大きい。具体的には、磁気プレートMP1aの前後方向の寸法が、磁気プレートMP1の前後方向の寸法の2倍である。なお、磁気プレートMP1aの左右方向の寸法は、磁気プレートMP1の左右方向の寸法と同一である。ラック242aの磁気プレートMP2aは、ラック242の磁気プレートMP2よりも大きい。具体的には、磁気プレートMP2aの左右方向の寸法が、磁気プレートMP2の左右方向の寸法の2倍である。なお、磁気プレートMP2aの前後方向の寸法は、磁気プレートMP2の前後方向の寸法と同一である。第1実施形態と同様に、ラック241aが第1テーブル21aに組み付けられ、ラック242aが第3テーブル23aに組み付けられている。なお、図23に示すように、駆動装置24aの平面視において、磁気プレートMP1a及び磁気プレートMP2aの各磁極の延設方向が磁気プレートMP1及び磁気プレートMP2の各磁極の延設方向に対して90°ずれている。これにより、ラック242aに対してラック241aを左方へスライドさせる駆動力が、ラック241aに対してラック242aを後方にスライドさせる駆動力に変換される。ラック242aに対してラック241aを右方へスライドさせる駆動力が、ラック241aに対してラック242aを前方にスライドさせる駆動力に変換される。ラック241aに対するラック242aの前後方向の移動距離は、ラック242aに対するラック241aの左右方向の移動距離と同一である。
つぎに、第1テーブル21a、第2テーブル22a及び第3テーブル23aのスライドについて説明する。まず、図24Aに示すように、第1テーブル21aが、その可動範囲の右端に位置し、第2テーブル22aが、その可動範囲の右端に位置しており、且つ第3テーブル23aが、その可動範囲の前端に位置している。この状態において、磁気プレートMP1aの正極部PP(負極部NP)と磁気プレートMP2aの負極部NP(正極部PP)とが互いに引き合い、上下方向に正対している。また、第2テーブル22aのキャッチ機構CRのオス部材C1とメス部材C2とが嵌合している。アクチュエータACによって第1テーブル21aが左方へ引かれて、第1テーブル21aが基台BPaに対して左方へスライドする。その際、図22Aを用いて説明したように、第2テーブル22aは、キャッチ機構CRの作用により、基台BPaに対して停止している。第2テーブル22aの左右方向のスライドがキャッチ機構CRによって規制されることにより、第3テーブル23aの左右方向のスライドも規制されている。したがって、第3テーブル23aに対して、第1テーブル21aが左方へスライドしている。すなわち、ラック242aに対してラック241aが左方へスライドしている。そのため、第3テーブル23aに対する第1テーブル21aの左方への移動距離と同じ距離だけ、第1テーブル21aに対して第3テーブル23aが後方へスライドする。
押圧子PPR21aが第2テーブル22aの凸部PR22aに当接したとき(図22B)、図24Bに示すように第3テーブル23aがその可動範囲の後端に至る。第1テーブル21aがさらに左方へ引かれると、第1テーブル21aと第2テーブル22aとが一体的に左方へスライドする。すなわち、この過程において第1テーブル21aと第2テーブル22aaとは、相対的にはスライドしない。つまり、ラック242aに対してラック241aは左右方向にスライドしない。したがって、第3テーブル23aは第2テーブル22aに対して静止している。すなわち、この過程において、第1テーブル21a、第2テーブル22a及び第3テーブル23aが一体的に左方へスライドする。
キャッチ機構CLのオス部材C1とメス部材C2とが嵌合したとき(図22C)、第2テーブル22aが基台BPaに対して停止する。また、その際、第1テーブル21aの凸部PL21aがストッパーSTL1に当接して、基台BPaに対して停止する。すなわち、第1テーブル21a、第2テーブル22a及び第3テーブル23aがそれらの可動範囲の左端に至る。
つぎに、第1テーブル21aが、アクチュエータACによって右方へ押されると、第1テーブル21aは、基台BPaに対して右方へスライドする。そのとき、第2テーブル22aは、キャッチ機構CLの作用により、基台BPaに対して停止している。第2テーブル22aの左右方向のスライドがキャッチ機構CLによって規制されることにより、第3テーブル23aの左右方向のスライドも規制されている。したがって、第3テーブル23aに対して、第1テーブル21aが右方へスライドしている。すなわち、ラック242aに対してラック241aが右方へスライドしている。そのため、第3テーブル23aに対する第1テーブル21aの右方への移動距離と同じ距離だけ、第1テーブル21aに対して第3テーブル23aが前方へスライドする。
押圧子PPL21aが第2テーブル22aの凸部PL22aに当接したとき(図22D)、図24Dに示すように、第3テーブル23aがその可動範囲の前端に至る。第1テーブル21aがさらに右方へ押されると、第1テーブル21aと第2テーブル22aとが一体的に右方へスライドする。すなわち、第1テーブル21aと第2テーブル22aとは、相対的にはスライドしない。つまり、ラック242aに対してラック241aは静止している。したがって、第3テーブル23aは第2テーブル22aに対して静止している。すなわち、この過程において、第1テーブル21a、第2テーブル22a及び第3テーブル23aが一体的に右方へスライドする。そして、キャッチ機構CRのオス部材C1とメス部材C2とが嵌合し、図24Aの状態に戻る
上記のように、第1テーブル21aを左右方向に往復させると、第3テーブル23aは矩形(本実施形態では正方形)の経路に沿って移動する。
図20Cに示すように、第3テーブル23aの上面には、左右方向に延びるアーム25aが取り付けられる。アーム25aの左右方向の寸法は、アーム25の左右方向の寸法より大きい。アーム25aの左右の端部には、第1実施形態と略同様に、パレットPaの下部を保持する保持装置26aL,26aRが取り付けられている。
アーム25aの左端部の下面には、後方へ延びる支持板27Lが取り付けられ、アーム25aの右端部の下面には、前方へ延びる支持板27Rが取り付けられている。支持板27Lの上面及び支持板27Rの上面には、アンチバックユニット28L及びアンチバックユニット28Rがそれぞれ取り付けられている。
ガイド部10aには、合計31個のパレットPaが載置される(図25A乃至図25D参照)。図24A乃至図24Dを用いて説明したように、第3テーブル23aが矩形の経路に沿って移動すると、保持装置26aL,26aRは、ガイド部10aの左右の端部の下方にて、矩形の経路に沿ってそれぞれ移動する。また、アンチバックユニット28L、28Rが第1実施形態と同様に機能する。これにより、図25A乃至図25Dに示すように、各パレットPaが搬送経路Raに沿って左回りに搬送される。
パレット搬送装置1aによれば、第1実施形態と同様に、1つのアクチュエータACのロッドAC2を往復駆動するだけで、搬送路Raに沿って各パレットPaを循環させることができる。また、駆動力伝達機構24aは、ラック241a(磁気プレートMP1a)とラック242a(磁気プレートMP2a)との間に作用する磁力を用いて、ラック241aを左右方向へスライドさせる駆動力を、ラック242aを前後方向へスライドさせる駆動力に変換している。駆動力伝達機構24aでは、ラック241aとラック242aが接触しないので、接触型の駆動力伝達機構に必要とされるメンテナンス及び部品交換が不要である。
ここで、第1実施形態では、図10A(図10C)に示す状態において第1テーブル21がアクチュエータACによって右方(左方)へ付勢されることにより、第2テーブル22及び第3テーブル23が第1テーブル21と一体的に右方(左方)へスライドして、図10B(図10D)に示す状態に至る。このとき、アクチュエータACの駆動力は第1テーブル21に作用している。そして、第1テーブル21のラック241と第3テーブル23のラック242の磁力(結合力)によって、第2テーブル22及び第3テーブル23が第1テーブル21に対して静止した状態が保持される。
パレット列PAF(PAR)がスライドし始める際、ボールローラーBRを凹部RPから離脱させる程度の力をパレットPaに作用させる必要がある。また、パレット列PAF(PAR)がスライドする際、各パレットPとガイド部10との間には摩擦力が生じる。この摩擦力は、パレットPの自重、パレットPに載置される部品(例えば加工される部品)の重量に依存する。また、駆動力伝達機構24の作用により、パレットPが内側ガイド板13に多少押し付けられる。このような負荷に対し、ラック241とラック242との結合力が比較的小さい場合、第1テーブル21をアクチュエータACによって付勢したとしても、第1テーブル21だけが右方(左方)へスライドし、第2テーブル22及び第3テーブル23が右方(左方)へスライドしない虞がある。このような事態を防止するため、ラック241とラック242との結合力を、負荷に応じて設定する必要がある。例えば、パレット列PAF(PAR)が第1実施形態よりも多くのパレットPaから構成される場合、磁気プレートMP1及び磁気プレートMP2の面積を第1実施形態よりも大きく設定するとよい。また、磁気プレートMP1及び磁気プレートMP2よりも強い磁力を有する磁気プレートを用いてもよい。ただし、これらの場合、磁気プレート同士が引き寄せあう力が比較的大きいため、駆動装置20の組み立て作業性が損なわれる虞がある。
これに対し、第2実施形態では、図24B(図24D)に示す状態において第1テーブル21aが左方(右方)へ付勢されることにより、第2テーブル22a及び第3テーブル23aが第1テーブル21aと一体的に左方(右方)へスライドして、図24C(図24A)に示す状態に至る。このとき、アクチュエータACの駆動力は第1テーブル21aに作用するとともに、押圧子PPR21a(押圧子PPL21a)を介して、第2テーブル22aに作用している。よって、ラック241aとラック242aとの結合力の大きさに関係なく、第2テーブル22a及び第3テーブル23aを第1テーブル21aと一体的に右方(左方)へ確実にスライドさせることができる。つまり、ラック241aとラック242aとの結合力が比較的小さくても問題がない。具体的には、図25A(図25C)において矢印を付した1つのパレットPaをスライドさせる程度の負荷に対応できるように前記結合力を設定すればよい。すなわち、磁気プレートMP1a及び磁気プレートMP2aの面積を比較的小さく設定できる。また、磁力の比較的小さい磁気プレートMP1a及び磁気プレートMP2aを用いることができる。よって、駆動装置20aの組み立て作業性が損なわれない。
さらに、本発明の実施にあたっては、上記実施形態に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。
上記実施形態において、アクチュエータACの往動作の途中で復動作に切り替えることはできない。また、アクチュエータACの復動作の途中で往動作に切り替えることはできない。このような動作をさせた場合、例えば、アンチバックユニット28Lによって、パレット列PARの左端部のパレットPが前方へ押される虞がある。また、例えば、アンチバックユニット28Rによって、パレット列PAFの右端部のパレットPが後方へ押される虞がある。これらの場合、パレットPは、それらが押された方向へは移動できないので、駆動装置20が破損する虞がある。したがって、アクチュエータACが往動作の途中で一時停止した場合、アクチュエータACの動作を再開させる際には、前記一時停止した状態から、アクチュエータACを往動作させる必要がある。また、アクチュエータACが復動作の途中で一時停止した場合、アクチュエータACの動作を再開させる際には、前記一時停止した状態から、アクチュエータACを必ず復動作させる必要がある。そこで、第1テーブル21、第2テーブル22及び第3テーブル23の現在位置、パレットPの現在位置などをそれぞれ検出する複数のセンサを設けておくとよい。そして、前記複数のセンサの出力に基づいて、アクチュエータACが一時停止する直前のアクチュエータACの動作方向(往動作又は復動作)を判別し、その判別結果に基づいて、アクチュエータACの動作を再開させる際の動作方向(往動作又は復動作)を決定すればよい。
また、上記実施形態では、平面視において、パレットP(パレットPa)を左回りに循環させているが、右回りに循環させる構成としてもよい。この場合、例えば、第1実施形態において、磁気プレートMP1及び磁気プレートMP2の各磁極の延設方向を90°ずらせばよい。つまり、第1実施形態において、第2実施形態と同様の磁気プレートMP1a,MP2aを用いることにより、パレットPを右回りに循環させることができる。また、第2実施形態において、磁気プレートMP1a及び磁気プレートMP2aの各磁極の延設方向を90°ずらせばよい。つまり、第2実施形態において、第1実施形態と同様の磁気プレートMP1,MP2を用いることにより、パレットPaを右回りに循環させることができる。。
また、例えば、上記実施形態の駆動力伝達機構24に代えて、図26に示す駆動力伝達機構24Aを用いてもよい。駆動力伝達機構24Aは、駆動力伝達機構24と同様に、上下一対のラック241及びラック242を有する。さらに、駆動力伝達機構24Aにおいては、ラック241とラック242との間に磁気筒MSが設けられている。磁気筒MSは、第2テーブル22に支持された図示しない軸部財であって、前後方向に延びる軸部材のまわりに回動可能に支持されている。磁気筒MSの側面には、正極部PPと負極部NPが2重螺旋状に配置されている。磁気プレートMP2に対して磁気プレートMP1が左右方向に移動すると、磁気プレートMP1と磁気筒MSとの間に作用する磁力により磁気筒MSが回転し、その磁気筒MSと磁気プレートMP2との間に作用する磁力により、磁気プレートMP2が前後方向に移動する。上記のように構成された駆動力伝達機構24Aを用いても、上記実施形態と同様の効果が得られる。
また、例えば、アンチバックユニット28L,28Rを省略してもよい。この場合、保持板28aと保持板28bとの距離を、基部P11の1辺の寸法WP11よりも少し小さく設定しておくとよい。この場合、保持板28aと保持板28bとの間に基部P11が進入したとき、保持板28aと保持板28bとが少し弾性変形し、その弾性力により、基部P11が保持板28aと保持板28bとの間に挟まれて把持される。
例えば、図13Bにおいて角部FRに位置するパレットPは、保持板28aと保持板28bとの間に挟まれて把持された状態で後方へスライドする。一方、図13Bにおけるパレット列PAFの左端のパレットPは、保持装置26Lが後方へ移動する際、保持装置26Lから滑りぬけるようにして元の位置に留まる。また、例えば、図13Dにおいて角部RLに位置するパレットPは、保持板28aと保持板28bとの間に挟まれて把持された状態で前方へスライドする。一方、図13Dにおけるパレット列PARの右端のパレットPは、保持装置26Rが前方へ移動する際、保持装置26Rから滑りぬけるようにして元の位置に留まる。これによれば、パレット搬送装置1の部品コストをさらに削減できる。よって、パレット搬送装置1をより安価に提供できる。
また、上記実施形態では、フランジ部P12にボールローラーBRが組み付けられている。そして、外側ガイド板11及び内側ガイド板13に、ボールローラーBRが嵌合する凹部RPが設けられている。これに代えて、外側ガイド板11及び内側ガイド板13にボールローラーBRが組み付けられ、フランジ部P12に凹部RPが設けられていてもよい。また、ボールローラーBRを用いない構成にしてもよい。
また、支持部材12L及び支持部材12Rは、外側ガイド板11の上方に配置されていてもよい。
なお、搬送路Rの長辺及び短辺の寸法は、上記実施形態に限られず、任意に設定可能である。また、パレットPの形状及び寸法は、上記実施形態に限られず、任意に設定可能である。例えば、アクチュエータACの1回の往動作及び復動作においてパレットPを左右方向へスライドさせる距離に基づいて、ストッパーSTL2とストッパーSTR2との左右方向の距離を設定するとよい。また、アクチュエータACの1回の往動作及び復動作においてパレットPを左右方向へスライドさせる距離に基づいて、ストッパーSTR1とストッパーSTR2との左右方向の距離、及びストッパーSTL1とストッパーSTL2との左右方向の距離をそれぞれ設定するとよい。