JP2018199560A - フォークリフト制御装置 - Google Patents
フォークリフト制御装置 Download PDFInfo
- Publication number
- JP2018199560A JP2018199560A JP2017105464A JP2017105464A JP2018199560A JP 2018199560 A JP2018199560 A JP 2018199560A JP 2017105464 A JP2017105464 A JP 2017105464A JP 2017105464 A JP2017105464 A JP 2017105464A JP 2018199560 A JP2018199560 A JP 2018199560A
- Authority
- JP
- Japan
- Prior art keywords
- fork
- axis direction
- pallet
- forklift
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






















Landscapes
- De-Stacking Of Articles (AREA)
- Forklifts And Lifting Vehicles (AREA)
Abstract
Description
フォークの差し込み方向が固定されておりフォークの差し込み方向が変更できない場合、フォークの角度を調整できないため、フォークをポケットに適切に差し込んでパレットを持ち上げることが困難である。
(1) パレットに設けられたポケットに、X軸方向の両側から一対のフォークを差し込んで、前記パレットの上昇または下降を行うフォークリフトを制御する、フォークリフト制御装置であって、
前記パレットのX軸方向の両側面におけるそれぞれの中心位置を検出するセンサと、
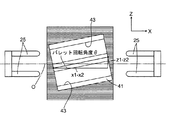
前記センサの検出値に基づいて、(i)前記パレットのX軸方向の両側面におけるそれぞれの中心位置のZ軸方向における平均を算出し、該平均と、一対の前記フォークのZ軸方向における中心である設備中心とが一致するように、前記パレットを移動させるとともに、(ii)前記パレットの回転角を算出する、パレット移動・回転角算出部と、
前記ポケットの幅と前記回転角とに基づいて、前記ポケットのZ軸方向長さであるフォーク差し込み範囲を算出するとともに、前記設備中心から前記ポケットの外側端までのZ軸方向の距離を算出する、フォーク差し込み範囲・距離算出部と、
前記フォークのZ軸方向の幅と、前記設備中心から前記フォークまでのZ軸方向の距離と、前記フォーク差し込み範囲と、前記設備中心から前記ポケットの外側端までのZ軸方向の距離と、の全部または一部に基づいて、前記フォークの前記ポケットへの差し込み可能量を算出する、差し込み可能量算出部と、
を有しており、
前記フォーク差し込み範囲が前記フォークのZ軸方向の幅より大きく、かつ、前記設備中心から前記ポケットの外側端までのZ軸方向の距離が前記設備中心から前記フォークの外側端までのZ軸方向の距離より大きく、かつ、前記フォークの前記ポケットへの差し込み可能量が閾値より大きい場合に、前記ポケットへの前記フォークの差し込みを許容する、
フォークリフト制御装置。
まず、本発明実施例の制御装置100によって制御されるフォークリフト20について説明する。
フォークリフト20の作動を説明する。
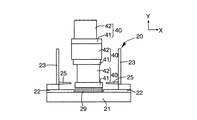
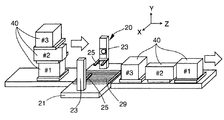
(i) フォークリフト20の原位置は、図3に示すように、リフター23が開き端にあり、フォーク25が下降端にある位置である。この状態から、図4に示すように、コンベア用モータ30にてコンベア29をZ軸方向に駆動させて、前工程から段積みされたスキッド40をフォークリフト20内に運び込む。
(A1)フォーク25のY軸方向の可動範囲は、上限は、各スキッド40の最大高さ+100mm+パレット41の最大厚みとし、下限は、コンベア29にパレット41(41a)を降ろすまでとする。上限は、下から2段目のパレット41(41a)のポケット43にフォーク25を進入させることができるようにするためであり、下限は、下から2段目にあったスキッド40を最下段のスキッドをばらした後にコンベア29に降ろすことを可能にするためである。
(A2)リフター23のX軸方向の可動範囲は、開きの寸法は、スキッド40のX軸方向の最大幅+フォーク25のX軸方向のサイズ+余裕(100mm程度)であり、閉じの寸法は、スキッド40のX軸方向の最小幅+余裕(100mm程度)とする。開きの寸法は、スキッド40をZ軸方向に移動させる際にフォーク25が邪魔になることを防止するためであり、閉じの寸法は、スキッド40のX軸方向の幅によらずフォーク25をポケット43に差し込むことができるようにするためである。
(A3)フォーク25のX軸方向のサイズは、フォーク25の掛かり(300mm程度)+余裕(100mm程度)とする。フォーク25のサイズは、スキッド40のX軸方向の幅によらずフォーク25をポケット43に差し込むことができるようにするためである。
これらの算出、判断(制御)は、本発明実施例の制御装置100を用いて行われる。
制御装置100は、図15に示すように、センサ100aと、パレット移動・回転角算出部100bと、フォーク差し込み範囲・距離算出部100cと、差し込み可能量算出部100dと、を有する。
図20に示すように、設備中心Oが2つのポケット43間にあるパレット外側面41aにかかる場合、Wa>wとなる。
このとき、図21を参照して、ポケット43の内側端43bからフォーク25のZ軸方向の中心までの長さLは、D,d,w,Waの全部を用いて、
L=D/2+d−|Wa−w|
となり、
フォーク25のZ軸方向の中心とポケット43の開口(入口)との交点43cと、ポケット43の内側端43bとの距離fは、図22を参照して、
f=L/cosθ
となる。
図21に示すように、交点43cを通り設備中心Oに平行な線を斜辺とし、交点43cとポケット43の内側端43bとの繋ぐ線(距離fに相当する線)を角度θの対向辺とする直角三角形の、斜辺の長さを、たとえば余裕代として20mmを加えてフォーク差し込み可能量eとすると、
e=f/sinθ+20mm
となる。
図23に示すように、設備中心Oが2つのポケット43間にあるパレット外側面41aにかからない場合、Wa≦wとなる部位が発生する。
このとき、図24を参照して、ポケット43の外側端43aからフォーク25のZ軸方向の中心までのZ軸方向の長さL1は、D,d,Waを用いて、
L1=Wa−(D/2+d)
となり、
フォーク25のZ軸方向の中心とポケット43の開口(入口)との交点43cと、ポケット43の外側端43aとの距離f1は、図25を参照して、
f1=L1/cosθ
となる。
図24に示すように、交点43cを通り設備中心Oに平行な線を斜辺とし、距離f1に相当する線を角度θの対向辺とする直角三角形の、斜辺の長さを、たとえば余裕代として20mmを加えてフォーク差し込み可能量eとすると、
e=f1/sinθ+20mm
となる。
ステップ101〜ステップ103は、パレット移動・回転角検出部100bで行われる。
ステップ104は、フォーク差し込み範囲・距離算出部100cと、差し込み可能量算出部100dとで行われる。
フォーク25の幅Dよりもフォーク差し込み範囲wが狭い場合、フォーク25がパレット41に当たってしまい、パレット41が損傷してしまうため、下記条件で差し込み可否判断をする。
w>Dのとき、差し込みOK
w≦Dのとき、差し込みNG
フォーク25の外側端までの距離(d+D)が、設備中心Oからポケット43の端までの距離Waよりも小さくなければ、フォーク25の端とパレット41端が当たってしまい、パレット41が損傷してしまうため、下記条件で差し込み可否判断をする。
Wa>(d+D)のとき、差し込みOK
Wa≦(d+D)のとき、差し込みNG
フォーク差し込み可能量eが荷山を持ち上げるために十分かどうかを下記条件で判定し、差し込み可否判断をする。なお、本発明実施例では、最小差し込み量(閾値)を100mmとしている。
e>最小差し込み量(100mm)のとき、差し込みOK
e≦最小差し込み量(100mm)のとき、差し込みNG
このとき、フォークリフト20のフォーク25以外の部分がパレット41に当たることを抑制するために、フォーク25の最大差し込み量(たとえば350mm)を予め設定しておき、
(i)最大差し込み量(350mm)>フォーク差し込み可能量e>最小差し込み量(100mm)のとき、算出したフォーク差し込み可能量eをフォークリフト20に出力し、(ii)フォーク差し込み可能量e≧最大差し込み量(350mm)のとき、フォーク差し込み可能量eではなく最大差し込み量(350mm)をフォークリフト20に出力する。
つぎに、本発明実施例の作用を説明する。
本発明実施例では、(a)フォーク差し込み範囲wがフォーク25のZ軸方向の幅Dより大きく、かつ、(b)設備中心Oからポケット43の外側端43aまでのZ軸方向の距離Waが設備中心Oからフォーク25の外側端までのZ軸方向の距離(d+D)より大きく、かつ、(c)フォーク25のポケット43への差し込み可能量eが閾値(最小差し込み量(100mm))より大きい場合に、ポケット43へのフォーク25の差し込みを許容する。上記(a)〜(c)の条件でフォーク25のポケット43への差し込みを行うことによって、パレット41を十分に支えることが可能な位置までフォーク25をポケット43に差し込むことができる状態でフォーク25をポケット43に差し込めるので、フォーク25の角度を調整できない場合であっても、フォーク25をポケット43に適切に差し込んでパレット41を持ち上げることが可能となる。
23 リフター
25 フォーク
29 コンベア
40 スキッド
41 パレット
42 部品箱
43 ポケット
100 フォークリフト制御装置
100a センサ
100b パレット移動・回転角算出部
100c フォーク差し込み範囲・距離算出部
100d 差し込み可能量算出部
d 設備中心からフォークの内側端までのZ軸方向の距離
D フォークの幅
e フォークのポケットへの差し込み可能量
P1,P2 パレットのX軸方向の両側面におけるそれぞれの中心位置(座標)
O 設備中心
w フォーク差し込み範囲
Wa 設備中心からポケットの外側端までのZ軸方向の距離
z3 P1,P2のZ軸方向における平均
θ 回転角
Claims (1)
- パレットに設けられたポケットに、X軸方向の両側から一対のフォークを差し込んで、前記パレットの上昇または下降を行うフォークリフトを制御する、フォークリフト制御装置であって、
前記パレットのX軸方向の両側面におけるそれぞれの中心位置を検出するセンサと、
前記センサの検出値に基づいて、(i)前記パレットのX軸方向の両側面におけるそれぞれの中心位置のZ軸方向における平均を算出し、該平均と、一対の前記フォークのZ軸方向における中心である設備中心とが一致するように、前記パレットを移動させるとともに、(ii)前記パレットの回転角を算出する、パレット移動・回転角算出部と、
前記ポケットの幅と前記回転角とに基づいて、前記ポケットのZ軸方向長さであるフォーク差し込み範囲を算出するとともに、前記設備中心から前記ポケットの外側端までのZ軸方向の距離を算出する、フォーク差し込み範囲・距離算出部と、
前記フォークのZ軸方向の幅と、前記設備中心から前記フォークまでのZ軸方向の距離と、前記フォーク差し込み範囲と、前記設備中心から前記ポケットの外側端までのZ軸方向の距離と、の全部または一部に基づいて、前記フォークの前記ポケットへの差し込み可能量を算出する、差し込み可能量算出部と、
を有しており、
前記フォーク差し込み範囲が前記フォークのZ軸方向の幅より大きく、かつ、前記設備中心から前記ポケットの外側端までのZ軸方向の距離が前記設備中心から前記フォークの外側端までのZ軸方向の距離より大きく、かつ、前記フォークの前記ポケットへの差し込み可能量が閾値より大きい場合に、前記ポケットへの前記フォークの差し込みを許容する、
フォークリフト制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017105464A JP6750564B2 (ja) | 2017-05-29 | 2017-05-29 | フォークリフト制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017105464A JP6750564B2 (ja) | 2017-05-29 | 2017-05-29 | フォークリフト制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018199560A true JP2018199560A (ja) | 2018-12-20 |
| JP6750564B2 JP6750564B2 (ja) | 2020-09-02 |
Family
ID=64667741
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017105464A Expired - Fee Related JP6750564B2 (ja) | 2017-05-29 | 2017-05-29 | フォークリフト制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6750564B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021160894A (ja) * | 2020-03-31 | 2021-10-11 | 株式会社豊田自動織機 | フォークリフト |
| CN114435434A (zh) * | 2021-12-28 | 2022-05-06 | 广州润易包装制品有限公司 | 一种可以辅助叉车装载的转运台车 |
| US11718513B2 (en) | 2019-09-13 | 2023-08-08 | Kabushiki Kaisha Toyota Jidoshokki | Position and posture estimation system |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59116399U (ja) * | 1983-01-24 | 1984-08-06 | 日立造船株式会社 | フオ−クリフトトラツク |
| JPS62211300A (ja) * | 1986-03-10 | 1987-09-17 | 株式会社小松製作所 | 無人フオ−クリフトにおける荷取り制御装置 |
| JPH02175599A (ja) * | 1988-12-23 | 1990-07-06 | Nippon Yusoki Co Ltd | 無人搬送車の荷役制御方法 |
| JPH07215695A (ja) * | 1994-01-31 | 1995-08-15 | Meidensha Corp | フォークリフト形無人搬送車の走行制御装置 |
| JPH10291797A (ja) * | 1997-04-18 | 1998-11-04 | Yoshiko Fujisawa | 多列フォークのフォーク位置合わせ装置 |
| JP2003104685A (ja) * | 2001-09-28 | 2003-04-09 | Maki Mfg Co Ltd | 移載設備 |
| JP2005075581A (ja) * | 2003-09-01 | 2005-03-24 | Suntory Ltd | 移送装置及び移送方法 |
| JP2017019596A (ja) * | 2015-07-08 | 2017-01-26 | 株式会社豊田自動織機 | 無人フォークリフトにおける荷取り時の走行制御方法及び荷取り時の走行制御装置 |
| JP2017178567A (ja) * | 2016-03-30 | 2017-10-05 | 株式会社豊田中央研究所 | フォークリフト |
-
2017
- 2017-05-29 JP JP2017105464A patent/JP6750564B2/ja not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59116399U (ja) * | 1983-01-24 | 1984-08-06 | 日立造船株式会社 | フオ−クリフトトラツク |
| JPS62211300A (ja) * | 1986-03-10 | 1987-09-17 | 株式会社小松製作所 | 無人フオ−クリフトにおける荷取り制御装置 |
| JPH02175599A (ja) * | 1988-12-23 | 1990-07-06 | Nippon Yusoki Co Ltd | 無人搬送車の荷役制御方法 |
| JPH07215695A (ja) * | 1994-01-31 | 1995-08-15 | Meidensha Corp | フォークリフト形無人搬送車の走行制御装置 |
| JPH10291797A (ja) * | 1997-04-18 | 1998-11-04 | Yoshiko Fujisawa | 多列フォークのフォーク位置合わせ装置 |
| JP2003104685A (ja) * | 2001-09-28 | 2003-04-09 | Maki Mfg Co Ltd | 移載設備 |
| JP2005075581A (ja) * | 2003-09-01 | 2005-03-24 | Suntory Ltd | 移送装置及び移送方法 |
| JP2017019596A (ja) * | 2015-07-08 | 2017-01-26 | 株式会社豊田自動織機 | 無人フォークリフトにおける荷取り時の走行制御方法及び荷取り時の走行制御装置 |
| JP2017178567A (ja) * | 2016-03-30 | 2017-10-05 | 株式会社豊田中央研究所 | フォークリフト |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11718513B2 (en) | 2019-09-13 | 2023-08-08 | Kabushiki Kaisha Toyota Jidoshokki | Position and posture estimation system |
| JP2021160894A (ja) * | 2020-03-31 | 2021-10-11 | 株式会社豊田自動織機 | フォークリフト |
| JP7287329B2 (ja) | 2020-03-31 | 2023-06-06 | 株式会社豊田自動織機 | フォークリフト |
| CN114435434A (zh) * | 2021-12-28 | 2022-05-06 | 广州润易包装制品有限公司 | 一种可以辅助叉车装载的转运台车 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6750564B2 (ja) | 2020-09-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12344488B2 (en) | Vision-assisted robotized depalletizer | |
| US12162704B2 (en) | Automated product unloading, handling, and distribution | |
| EP3718951B1 (en) | Load handling module for a material handling vehicle | |
| KR101902678B1 (ko) | 궤적 계획을 위한 물체 메트릭들의 실시간 결정 | |
| EP3507216B1 (en) | Automated storage and retrieval system with detector for detecting items extending beyond dimensional threshold | |
| US9688489B1 (en) | Modular dock for facilities integration | |
| JP7533270B2 (ja) | フォークリフト、及び、フォークリフトの制御方法 | |
| CN109789904B (zh) | 货物装卸车、货物转运系统和自动调整货物布局的方法 | |
| CN114641447A (zh) | 移动式自动引导车辆托盘堆叠器和卸堆器系统及其方法 | |
| JP6750564B2 (ja) | フォークリフト制御装置 | |
| US20240316779A1 (en) | Robotic system with object handling mechanism for loading and unloading of cargo carriers | |
| RU2412102C1 (ru) | Способ и устройство для разгрузки роликовых тележек с поддонов и транспортирования | |
| CN110023214A (zh) | 一种货物装卸车和货物转运系统 | |
| TW201936474A (zh) | 卸載裝置 | |
| JP6673087B2 (ja) | フォークリフト制御装置 | |
| US20260054969A1 (en) | Control of an automated guided vehicle with forklift capabilities | |
| JP2010100408A (ja) | スタッカクレーン | |
| KR100596675B1 (ko) | 무인크레인의 3축 연동제어방법 및 시스템 | |
| JP7629893B2 (ja) | クレーンの運転システムおよび運転方法 | |
| US20260042618A1 (en) | Robotic system with transferring structure | |
| CN118666204A (zh) | 用于物料搬运交通工具的负载搬运传感器 | |
| HK40037444B (zh) | 用於物料搬运车辆的负载搬运模块 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190827 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200630 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200714 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200727 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6750564 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |