JP2019088185A - Dcモータの駆動回路、駆動方法およびそれを用いた電子機器 - Google Patents
Dcモータの駆動回路、駆動方法およびそれを用いた電子機器 Download PDFInfo
- Publication number
- JP2019088185A JP2019088185A JP2018200011A JP2018200011A JP2019088185A JP 2019088185 A JP2019088185 A JP 2019088185A JP 2018200011 A JP2018200011 A JP 2018200011A JP 2018200011 A JP2018200011 A JP 2018200011A JP 2019088185 A JP2019088185 A JP 2019088185A
- Authority
- JP
- Japan
- Prior art keywords
- drive
- motor
- command value
- value
- drive circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 19
- 238000001514 detection method Methods 0.000 claims abstract description 58
- 238000013459 approach Methods 0.000 claims abstract description 16
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 claims description 22
- 230000008859 change Effects 0.000 claims description 17
- 230000007704 transition Effects 0.000 claims description 11
- 239000004065 semiconductor Substances 0.000 claims description 7
- 239000000758 substrate Substances 0.000 claims description 7
- 230000004044 response Effects 0.000 claims description 6
- 230000010354 integration Effects 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 32
- 230000006870 function Effects 0.000 description 17
- 230000004048 modification Effects 0.000 description 15
- 238000012986 modification Methods 0.000 description 15
- 239000000872 buffer Substances 0.000 description 5
- 230000008569 process Effects 0.000 description 4
- 239000003990 capacitor Substances 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- CHBBVOLNJBUVGQ-UHFFFAOYSA-N (2,4-dioxo-1h-pyrimidin-5-yl)methyl phosphono hydrogen phosphate Chemical compound OP(O)(=O)OP(O)(=O)OCC1=CNC(=O)NC1=O CHBBVOLNJBUVGQ-UHFFFAOYSA-N 0.000 description 2
- 101100464779 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) CNA1 gene Proteins 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000003708 edge detection Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000006641 stabilisation Effects 0.000 description 2
- 238000011105 stabilization Methods 0.000 description 2
- 101100524516 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) RFA2 gene Proteins 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 239000013256 coordination polymer Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000002459 sustained effect Effects 0.000 description 1
Images
















Landscapes
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
Description
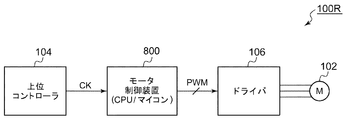
CPUやマイコンは高価であるため、DCモータの制御のためのモータ制御装置800をCPUやマイコンで構成すると、機器のコストが高くなるという問題がある。
多くのアプリケーションにおいて、ステッピングモータを回転動作させる期間と、回転停止させる期間(保持動作)が交互に発生する。外力がない状況では、DCモータへの給電を停止することでDCモータを静止することが可能であるが、外力が加わる状況では、DCモータに外力と釣り合うトルクを発生させる必要がある。
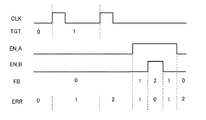
本明細書に開示される一実施の形態は、モータ駆動回路(駆動IC)に関する。モータ駆動ICは、ロジック回路で構成され、上位コントローラからのクロック信号と、エンコーダからのパルス信号と、を受け、パルス信号にもとづくロータの現在位置と、クロック信号にもとづくロータの目標位置との差分である位置誤差値を生成する誤差検出器と、ロジック回路で構成され、位置誤差値がゼロに近づくように指令値を生成するフィードバックコントローラと、ロジック回路で構成され、指令値に応じた駆動信号を生成する駆動信号生成部と、を備え、ひとつの半導体基板に集積化される。
本明細書に開示される一実施の形態は、モータ駆動回路に関する。モータ駆動回路は、上位コントローラからのクロック信号と、エンコーダからのパルス信号と、に応じてDCモータを駆動する。
駆動回路は、クロック信号にもとづくロータの目標位置を示す位置指令値と、パルス信号にもとづくロータの現在位置を示す位置検出値との差分に応じた位置誤差値を生成する誤差検出器と、位置誤差値がゼロに近づくようにトルク指令値を生成するフィードバックコントローラと、トルク指令値に応じた駆動信号を生成する駆動信号生成部と、を備える。駆動回路は、回転制御モードと保持モードが切りかえ可能であり、回転制御モードと保持モードでフィードバックコントローラの制御特性(制御パラメータ)が切り替わる。
以下、本発明を好適な実施の形態をもとに図面を参照しながら説明する。各図面に示される同一または同等の構成要素、部材、処理には、同一の符号を付するものとし、適宜重複した説明は省略する。また、実施の形態は、発明を限定するものではなく例示であって、実施の形態に記述されるすべての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。
VHB=VREF×(1+R11/R12)
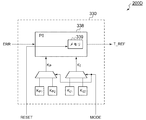
図7は、回転制御モードと保持モードの切り替えをサポートする駆動IC200Dのブロック図である。
第1コントローラ332、第2コントローラ334は、リセット信号RESETに応答して、積分値をゼロリセットする。
回転制御モードと保持モードとで、PI制御器のゲインを切りかえる場合を説明したが、その限りでない。たとえば回転制御モードと保持モードとで、制御の方式(P制御、PI制御、PID制御)が異なっていてもよい。
回転制御モードと保持モードとで、演算周期(ΔT)が異なっていてもよい。すなわち保持モードでは、演算周期ΔTを長くし、回転制御モードでは演算周期ΔTを短くしてもよい。
駆動IC200Dが、後述の休止モードをサポートし、後述のカウンタ450(図11)が設けられる場合、カウンタ472はカウンタ450と兼用とすることができる。また、カウンタ472における判定時間τ1は、カウンタ450における判定時間τ2と同一か、それより短く設定される。
図10は、変形例4に係る駆動IC200Dの一部のブロック図である。この変形例では、フィードバックコントローラ330は、単一のPIコントローラ338を含む。PIコントローラ338の比例ゲインKPと積分ゲインKIは、回転制御モード用の値KP1,KI1と、保持モード用の値KP2,KI2が別々に用意され、モード判定部470が指示するモードに応じた値のセットが、PIコントローラ338にロードされ、ゲインが変更される。またPIコントローラ338の積分値を保持するメモリ339の値は、モード判定部470が生成するリセット信号RESETに応じてゼロとなる。
クロック信号CLKの有無によってモードを切り替えたがその限りでない。上位コントローラから駆動IC200Dに対して、モードを指示する信号を与え、この信号に応じてモードを切り替えてもよい。
図11は、休止モードをサポートする駆動IC200Cの一部のブロック図である。駆動IC200Cは、誤差検出器310、フィードバックコントローラ330、駆動信号生成部340に加えて、カウンタ450、休止モード判定部460を備える。誤差検出器310、フィードバックコントローラ330、駆動信号生成部340の主な機能、動作については、図4を参照してすでに説明した。
位置誤差値ERRがゼロである場合には、それ以上、DCモータを駆動する必要は無いため、カウンタに加えて、その他の不要な回路ブロックを停止することが可能となる。
駆動IC200Cは、休止モードにおいて、クロック信号CLKの入力が検出されると直ちに通常のモードに復帰してもよい。
図13は、ショートブレーキ機能を備える駆動IC200Bの一部のブロック図である。駆動IC200Bは、誤差検出器310B、フィードバックコントローラ330、駆動信号生成部340に加えて、ブレーキコントローラ430を備える。誤差検出器310、フィードバックコントローラ330、駆動信号生成部340の主な機能、動作については、図4を参照してすでに説明した。
(条件1) 位置超過 P_FB>P_TGT
(条件2) 速度超過 V_FB>V_TGT
(条件3) T_REF<0
(条件1) 位置超過 P_FB>P_TGT+ΔP
(条件2) 速度超過 V_FB>V_TGT+ΔV
(条件3) T_REF<−ΔT
ΔP,ΔV,ΔTはマージンである。
モータ駆動システム100においては、上位コントローラからのクロック信号CLKの周波数の低下が減速指令を意味する。駆動IC200Bは、クロック信号CLKの周波数の低下を条件とするのではなく、上述の条件1〜3の成立を条件として、ブレーキをかける。これにより、DCモータを正確に減速させることができる。
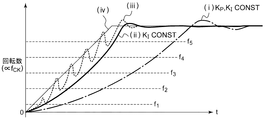
ステッピングモータを駆動するプラットフォームにおいては、停止したステッピングモータを回転させる際に、モータの回転数の指令値に相当するクロック信号CLKの周波数をいきなり高い周波数とすると、脱調するおそれがある。
続いて、電子ギアについて説明する。上位コントローラ104のスペックによっては、クロック信号CLKの周波数fCKの可変範囲が制約される場合がある。たとえば、クロック周波数fCKの上限fMAXが低いと、その上限fMAXでDCモータの回転数が制約される。上限周波数fMAXで規定される回転数よりも高い回転数でモータを回転させたい場合、従来では機械ギアを用いる必要があり、コストアップの要因となっていた。この問題を解消するために、駆動IC200は、電子ギアの機能を備える。
図21は、モータ駆動システム100を備える電子機器を示す図である。図21には、電子機器900の一例として、プリンタを示す。電子機器900は、複数のDCモータ902、904を備える。たとえばDCモータ902は、プリントヘッド910の駆動機構912に用いられる。DCモータ904は、用紙送りの駆動機構914に用いられる。
実施の形態では、ホールセンサを用いたモータ駆動を説明したが、センサレスであってもよい。この場合、駆動IC200に、逆起電力を検出するコンパレータを実装すればよい。
実施の形態では、ドライバ106のハイサイドトランジスタのゲート駆動電圧を得るためにチャージポンプを利用したが、ブートストラップ回路を内蔵してもよい。なおドライバ106のハイサイドトランジスタは、Pチャンネルであってもよく、この場合チャージポンプは不要である。
実施の形態では、ドライバ106が駆動IC200に外付けされたが、ドライバ106を駆動IC200に集積化してもよい。反対に、実施の形態では、プリドライバ250が駆動IC200に集積化されたが、プリドライバ250を駆動IC200の外部に設けてもよく、たとえばドライバ106とプリドライバ250を集積化してもよい。
実施の形態では、駆動ICをロジック回路で実装したが、その限りでなく、ロジック回路300で示されるブロックを、プロセッサ(CPUやマイコン)とソフトウェアプログラムの組み合わせで構成してもよい。
102 DCモータ
104 上位コントローラ
106 ドライバ
110 ホールセンサ
112 エンコーダ
200 駆動IC
BUF 入力バッファ
HCMP ホールコンパレータ
250 プリドライバ
260 電源回路群
262 オペアンプ
264 基準電圧源
266 チャージポンプ
268,270 電源回路
280 保護回路
300 ロジック回路
310 誤差検出器
312 位置指令値生成部
314 位置検出値生成部
316 減算器
320 エッジ検出回路
322 アップダウンカウンタ
324 演算器
325 メモリ
326 オペコードセレクタ
327 セレクタ
328 加算器
329 メモリ
330 フィードバックコントローラ
340 駆動信号生成部
342 パルス幅変調器
344 通電ロジック
360 ギア比選択部
Claims (24)
- DCモータの駆動回路であって、
上位コントローラからのクロック信号と、エンコーダからのパルス信号と、を受け、前記パルス信号にもとづく前記DCモータのロータの現在位置と、前記クロック信号にもとづく前記ロータの目標位置との差分である位置誤差値を生成する誤差検出器と、
ロジック回路で構成され、前記位置誤差値がゼロに近づくように指令値を生成するフィードバックコントローラと、
ロジック回路で構成され、前記指令値に応じた駆動信号を生成する駆動信号生成部と、
を備え、ひとつの半導体基板に集積化されることを特徴とする駆動回路。 - 前記フィードバックコントローラは、PI(比例積分)制御器を含むことを特徴とする請求項1に記載の駆動回路。
- 前記PI制御器の制御特性は、前記クロック信号の周波数に応じて動的に変化することを特徴とする請求項2に記載の駆動回路。
- 前記PI制御器の積分ゲインは一定であり、比例ゲインが前記クロック信号の周波数に応じて変化することを特徴とする請求項3に記載の駆動回路。
- 前記誤差検出器は、
前記クロック信号のエッジの個数の積算値に応じたターゲット値を生成する位置指令値生成部と、
前記パルス信号にもとづき、前記ロータの現在位置を示すフィードバック値を生成する位置検出値生成部と、
前記ターゲット値と前記フィードバック値の差分を生成する減算器と、
を含むことを特徴とする請求項1から4のいずれかに記載の駆動回路。 - 前記位置指令値生成部は、前記クロック信号の1エッジあたりの前記ターゲット値の変化量が複数値から選択可能であることを特徴とする請求項5に記載の駆動回路。
- 前記位置検出値生成部は、前記パルス信号の1個あたりの前記フィードバック値の変化量が複数値から選択可能であることを特徴とする請求項5または6に記載の駆動回路。
- 前記変化量を指定するための設定ピンをさらに備えることを特徴とする請求項6または7に記載の駆動回路。
- 前記DCモータを駆動するインバータを制御するプリドライバをさらに備えることを特徴とする請求項1から8のいずれかに記載の駆動回路。
- DCモータと、
前記DCモータを駆動するインバータを含むドライバと、
前記ドライバを制御する請求項1から9のいずれかに記載の駆動回路と、
を備えることを特徴とする電子機器。 - 上位コントローラからのクロック信号と、エンコーダからのDCモータのロータの位置を示すパルス信号と、に応じてDCモータを駆動する駆動回路であって、
前記クロック信号にもとづく前記ロータの目標位置を示す位置指令値と、前記パルス信号にもとづく前記ロータの現在位置を示す位置検出値との差分に応じた位置誤差値を生成する誤差検出器と、
前記位置誤差値がゼロに近づくようにトルク指令値を生成するフィードバックコントローラと、
前記トルク指令値に応じた駆動信号を生成する駆動信号生成部と、
を備え、
回転制御モードと保持モードが切りかえ可能であり、前記回転制御モードと前記保持モードとで、前記フィードバックコントローラの制御特性および前記駆動信号生成部における前記駆動信号の生成方法の少なくとも一方が切り替わることを特徴とする駆動回路。 - 前記フィードバックコントローラはPI(Proportional Integral)制御器を含み、
前記回転制御モードと前記保持モードとで、前記PI制御器の比例ゲインと積分ゲインの少なくとも一方が異なることを特徴とする請求項11に記載の駆動回路。 - 前記回転制御モードと前記保持モードが切り替わる際に、積分値がゼロリセットされることを特徴とする請求項12に記載の駆動回路。
- 前記クロック信号の入力状態にもとづいて、前記回転制御モードと前記保持モードを判定するモード判定部をさらに備えることを特徴とする請求項11から13のいずれかに記載の駆動回路。
- 前記モード判定部は、前記クロック信号の無入力状態の持続時間を測定するカウンタを含み、前記クロック信号の無入力状態が所定時間持続すると、前記回転制御モードから前記保持モードに移行することを特徴とする請求項14に記載の駆動回路。
- 前記フィードバックコントローラは、前記回転制御モードに関連する第1コントローラと、前記保持モードに関連する第2コントローラと、を含むことを特徴とする請求項11から15のいずれかに記載の駆動回路。
- 前記フィードバックコントローラは、単一のコントローラを含み、前記回転制御モードと前記保持モードとで、ゲインが変更されることを特徴とする請求項11から16のいずれかに記載の駆動回路。
- 前記駆動信号生成部は、前記回転制御モードにおいて、前記上位コントローラからの方向指示信号に応じて回転方向を決定し、前記保持モードにおいて、前記トルク指令値の符号にもとづいて回転方向を決定することを特徴とする請求項11から17のいずれかに記載の駆動回路。
- 前記駆動信号生成部は、
前記トルク指令値に応じたデューティ比を有するPWM(Pulse Width Modulation)信号を生成するパルス幅変調器と、
前記PWM信号とホールコンパレータの出力とにもとづいて前記駆動信号を生成する通電ロジックと、
を含むことを特徴とする請求項11から18のいずれかに記載の駆動回路。 - 前記DCモータを駆動するインバータを制御するプリドライバをさらに備えることを特徴とする請求項11から19のいずれかに記載の駆動回路。
- ひとつの半導体基板に集積化されることを特徴とする請求項1から20のいずれかに記載の駆動回路。
- DCモータと、
前記DCモータを駆動するインバータを含むドライバと、
前記ドライバを制御する請求項11から21のいずれかに記載の駆動回路と、
を備えることを特徴とする電子機器。 - DCモータの駆動方法であって、
上位コントローラからのクロック信号にもとづき、前記DCモータのロータの目標位置を示す位置指令値を生成するステップと、
エンコーダからのDCモータのロータの位置を示すパルス信号にもとづき、前記ロータの現在位置を示す位置検出値を生成するステップと、
回転制御モードと保持モードを選択するステップと、
前記位置検出値と前記位置指令値の誤差がゼロに近づくように、トルク指令値を生成するステップであって、前記回転制御モードと前記保持モードとで、制御特性が異なるステップと、
を備えることを特徴とする駆動方法。 - DCモータの駆動方法であって、
上位コントローラからのクロック信号にもとづき、前記DCモータのロータの目標位置を示す位置指令値を生成するステップと、
エンコーダからのDCモータのロータの位置を示すパルス信号にもとづき、前記ロータの現在位置を示す位置検出値を生成するステップと、
前記位置検出値と前記位置指令値の誤差がゼロに近づくように、トルク指令値を生成するステップと、
回転制御モードと保持モードを選択するステップと、
前記トルク指令値にもとづいてインバータの状態を規定する駆動信号を生成するステップであって、前記回転制御モードと前記保持モードとで、前記駆動信号の生成方法が異なるステップと、
を備えることを特徴とする駆動方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/176,412 US10879819B2 (en) | 2017-11-02 | 2018-10-31 | Driving circuit and driving method for DC motor |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017213091 | 2017-11-02 | ||
| JP2017213089 | 2017-11-02 | ||
| JP2017213089 | 2017-11-02 | ||
| JP2017213091 | 2017-11-02 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019088185A true JP2019088185A (ja) | 2019-06-06 |
| JP7311957B2 JP7311957B2 (ja) | 2023-07-20 |
Family
ID=66763574
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018200011A Active JP7311957B2 (ja) | 2017-11-02 | 2018-10-24 | Dcモータの駆動回路およびそれを用いた電子機器 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7311957B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117914184A (zh) * | 2023-12-21 | 2024-04-19 | 中国第一汽车股份有限公司 | 直流无刷电机及其控制方法、控制装置、计算机存储介质 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03150610A (ja) * | 1989-11-08 | 1991-06-27 | Mitsubishi Heavy Ind Ltd | ロストモーション補正機能付サーボ制御装置 |
| JPH0947059A (ja) * | 1995-07-27 | 1997-02-14 | Fuji Xerox Co Ltd | モータの速度制御装置 |
| JP2011114951A (ja) * | 2009-11-26 | 2011-06-09 | Ricoh Co Ltd | モータ制御装置、モータ制御システム、画像形成装置 |
| JP2013094037A (ja) * | 2011-10-27 | 2013-05-16 | Ricoh Co Ltd | 駆動装置及びそれを備えた画像形成装置 |
| JP2014039417A (ja) * | 2012-08-17 | 2014-02-27 | Ricoh Co Ltd | モータ制御装置およびモータ制御方法、ならびに、画像形成装置 |
| JP2016171707A (ja) * | 2015-03-13 | 2016-09-23 | ミネベア株式会社 | モータ駆動制御装置及びモータ制御システム |
| JP2017184426A (ja) * | 2016-03-30 | 2017-10-05 | ローム株式会社 | 三相モータの駆動回路および駆動方法、プリンタ装置 |
| JP2017192195A (ja) * | 2016-04-12 | 2017-10-19 | 京セラドキュメントソリューションズ株式会社 | モーター制御装置、画像形成装置、モーター制御方法、画像形成装置の制御方法 |
-
2018
- 2018-10-24 JP JP2018200011A patent/JP7311957B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03150610A (ja) * | 1989-11-08 | 1991-06-27 | Mitsubishi Heavy Ind Ltd | ロストモーション補正機能付サーボ制御装置 |
| JPH0947059A (ja) * | 1995-07-27 | 1997-02-14 | Fuji Xerox Co Ltd | モータの速度制御装置 |
| JP2011114951A (ja) * | 2009-11-26 | 2011-06-09 | Ricoh Co Ltd | モータ制御装置、モータ制御システム、画像形成装置 |
| JP2013094037A (ja) * | 2011-10-27 | 2013-05-16 | Ricoh Co Ltd | 駆動装置及びそれを備えた画像形成装置 |
| JP2014039417A (ja) * | 2012-08-17 | 2014-02-27 | Ricoh Co Ltd | モータ制御装置およびモータ制御方法、ならびに、画像形成装置 |
| JP2016171707A (ja) * | 2015-03-13 | 2016-09-23 | ミネベア株式会社 | モータ駆動制御装置及びモータ制御システム |
| JP2017184426A (ja) * | 2016-03-30 | 2017-10-05 | ローム株式会社 | 三相モータの駆動回路および駆動方法、プリンタ装置 |
| JP2017192195A (ja) * | 2016-04-12 | 2017-10-19 | 京セラドキュメントソリューションズ株式会社 | モーター制御装置、画像形成装置、モーター制御方法、画像形成装置の制御方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117914184A (zh) * | 2023-12-21 | 2024-04-19 | 中国第一汽车股份有限公司 | 直流无刷电机及其控制方法、控制装置、计算机存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7311957B2 (ja) | 2023-07-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5410690B2 (ja) | ブラシレスモータ制御装置及びブラシレスモータ | |
| US8183807B2 (en) | Method of driving DC motor and related circuit for avoiding reverse current | |
| JP2011199968A (ja) | ブラシレスモータ制御装置及びブラシレスモータ制御方法 | |
| CN108155834B (zh) | 电机驱动控制装置以及电机驱动控制装置的控制方法 | |
| US11290051B2 (en) | Motor control apparatus and control method of the same | |
| JP6392509B2 (ja) | モータ制御回路 | |
| US10879819B2 (en) | Driving circuit and driving method for DC motor | |
| CN113678363B (zh) | 电机驱动控制装置以及电机的驱动控制方法 | |
| JP5307997B2 (ja) | ブラシレスdcモータの駆動装置 | |
| JP7311957B2 (ja) | Dcモータの駆動回路およびそれを用いた電子機器 | |
| JP6934394B2 (ja) | Dcモータの駆動回路、駆動方法およびそれを用いた電子機器 | |
| JP2004166436A (ja) | 電動流体ポンプ装置 | |
| JP7012507B2 (ja) | Dcモータの駆動回路、駆動方法およびそれを用いた電子機器 | |
| CN107078679B (zh) | 电力转换装置和电力转换装置的控制方法 | |
| JP7249740B2 (ja) | モータ駆動装置、モータシステム、ファンモータ及びモータ駆動方法 | |
| JP6698403B2 (ja) | モータの駆動回路、プリンタ装置 | |
| JP2009278734A (ja) | 電圧制御回路及びモータ駆動装置 | |
| JP4062228B2 (ja) | 直流電動機の駆動装置 | |
| JP5399085B2 (ja) | ブラシレスモータの駆動回路、モータユニット、ならびにそれを用いた電子機器 | |
| US20240333111A1 (en) | Motor driver circuit and driving method, cooling device and electronic apparatus using the same | |
| CN115632578B (zh) | 马达控制器 | |
| JP7777095B2 (ja) | モータ駆動制御装置およびモータユニット | |
| JP4695924B2 (ja) | モータ駆動装置 | |
| KR101244843B1 (ko) | 센서리스 bldc 모터의 역기전력 검출 회로 및 그 방법 | |
| CN119675499A (zh) | 马达驱动装置、半导体装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210825 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220720 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220802 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220921 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230309 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230704 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230707 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7311957 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |