以下、本発明の一実施の形態を図面を参照しつつ説明する。なお、以下では、作業装置(フロント装置)によって施工現場の切土、盛土、整地などの作業を行う油圧ショベルを作業機械の一例として説明するが、例えば、作業装置によって土砂を運搬するホイールローダなどの他の作業機械に本発明を適用しても構わない。
図1は、本発明の一実施の形態に係る施工管理システムのサーバコンピュータおよび作業機械の関係を関連構成とともに模式的に示す図である。また、図2は、本発明の一実施の形態に係る作業機械の一例である油圧ショベルの外観を模式的に示す側面図である。
図1において、施工管理システム1は、調査、設計、施工、検査、及び、維持管理を含む各工程から得られる電子情報に基づいて施工計画とその進捗状況を出力して可視化するシステムである。施工管理システム1は、サーバコンピュータ2を備えており、サーバコンピュータ2は、通信回路網16(例えば、衛星通信回路を含むインターネット通信網など)を介して施工会社12、施工現場3、及び、サービスセンタ14等と電子情報のやり取りを行うことによって、施工現場3の施工計画を導出して施工管理を実施する。
施工現場3には、切土、盛土、整地などの作業を行う油圧ショベル(作業機械)4が配置されるほか、施工現場3を管理するための現場事務所9が設置されており、現場事務所9では作業者Waがパソコン等の情報端末を用いて管理作業を行う。また、作業者Waは、携帯型情報端末7を所持しており、油圧ショベル4と連携させることによって電子情報の授受を行い管理作業を行うことができる。
施工現場3では、現況地形を示すデータ(現況地形データ)の生成が行われる。現況地形データの生成方法としては種々のものが考えられるが、例えば、所定の計測装置による計測結果(測量図面など)やステレオカメラ等で撮影された画像などの現況地形を表す情報から現況地形データを生成する方法のほか、現況地形を検出するためのドローン(無人飛行機)10に搭載されたカメラ11によって得られた画像データから現況地形データを生成する方法などがある。例えば、施工現場3で稼動するドローン10は、施工現場3を空撮するためのカメラ11を有しており、無線通信等を用いた遠隔操作によって施工現場3の上空を所定の飛行ルートに沿って飛行する。ドローン10のカメラ11で空撮した画像のデータは、施工会社12の情報端末13や現場事務所9の情報端末8、サーバコンピュータ2などで処理が行われ、施工現場3の現況地形データが生成される。
油圧ショベル4は情報化施工に対応しており、車体本体200に取り付けられた作業装置(フロント装置)201を有している。油圧ショベル4は、GPSアンテナ50とGPS受信機(GNSS受信機であり、後述する位置検出部902にその機能が含まれている)とを備えており、測位衛星6を含むGPS(Global Positioning System:全地球測位システム)によって、グローバル基準の座標系における油圧ショベル4の位置(すなわち、地球に対する絶対位置)が検出される。また、油圧ショベル4には、作業装置201の姿勢を検出する姿勢検出装置(後述の姿勢センサ221〜223)が設けられている。そして、これらの装置で検出した情報に基づき、油圧ショベル4の絶対位置と、油圧ショベル4の車体本体200の姿勢、及び、車体本体200に対する作業装置201の相対的な姿勢に応じて作業装置201の所定部位の絶対位置が検出される。
施工会社12では、施工現場3の設計地形が作成される。設計地形は、施工現場3における地面の目標形状である。施工会社12には、パソコン等の情報端末13が設置されており、作業者Wbは情報端末13を用いて2次元または3次元の設計地形のデータ(設計地形データ)を作成する。
サービスセンタ14では、施工現場3から要求された設計地形の変更や3次元画像データの作成などを行う。サービスセンタ14には、パソコン等の情報端末15が設置されており、作業者Wcは情報端末15を用いて作業を行う。
なお、上記において、施工管理システム1を構成するサーバコンピュータ2の設置場所については特に限定していないが、例えば、施工現場3の現場事務所9に設置したり、或いは、施工現場3から離れた遠隔地に設置したりしても良い。また、サーバコンピュータ2は、施工現場3に対応するサービスセンタ14に設置しでも良く、サービスセンタ14に設置された情報端末15にサーバコンピュータ2の機能を持たせて処理を行っても良い。
図2において、油圧ショベル4は、垂直方向にそれぞれ回動する複数のフロント部材(ブーム231、アーム232、バケット233)を連結して構成された多関節型の作業装置201(フロント装置)と、車体本体200を構成する上部旋回体200A及び下部走行体200B(走行装置)とを備えており、上部旋回体200Aは下部走行体200Bに対して旋回可能に設けられている。上部旋回体200Aは、基部となる旋回フレーム31上に各部材を配置して構成されており、上部旋回体200Aを構成する旋回フレーム31が下部走行体200Bに対して旋回可能となっている。また、作業装置201のブーム231の基端は上部旋回体200Aの前部にブームピン241を介して垂直方向に回動可能に支持されており、アーム232の一端はブーム231の基端とは異なる端部(先端)にアームピン242を介して垂直方向に回動可能に支持されており、アーム232の他端にはバケット233がバケットピン243を介して垂直方向に回動可能に支持されている。
下部走行体200Bは、左右一対のクローラフレーム251a(251b)にそれぞれ掛け回された一対のクローラ252a(252b)と、クローラ252a(252b)をそれぞれ駆動する走行油圧モータ250a(250b)(図示しない減速機構を含む)とから構成されている。なお、図2において、下部走行体200Bの各構成については、左右一対の構成のうちの一方のみを図示して符号を付し、他方の構成については図中に括弧書きの符号のみを示して図示を省略する。
フロント部材231〜233は油圧アクチュエータであるブームシリンダ211、アームシリンダ212、及び、バケットシリンダ213により駆動されて回動動作を行い、下部走行体200Bは左右の走行油圧モータ250a(250b)によりそれぞれ駆動されて走行動作を行う。また、上部旋回体200Aは油圧アクチュエータである旋回油圧モータ32により駆動されて下部走行体200Bに対して旋回動作を行う。
作業装置201のフロント部材231〜233には、それぞれの姿勢情報を取得するための姿勢センサとして、ブーム角センサ221、アーム角センサ222、及びバケット角センサ223が配置されている。また、上部旋回体200Aには、上部旋回体200A(つまり、車体本体200)の姿勢情報として傾斜角情報(ロール角、ピッチ角、ヨー角)を検出する姿勢センサとして車体傾斜センサ224が配置されている。姿勢センサ221〜224は、例えば、それらが設置された各フロント部材231〜233及び上部旋回体200Aの角速度及び加速度を計測するIMU(Inertial Measurement Unit:慣性計測装置)である。
姿勢センサ221〜224に設定されたIMU座標系における加速度や角速度の計測値を出力する。そして、これらの計測値と、姿勢センサ221〜224の取り付け状態(つまり、ブーム角センサ221、アーム角センサ222、及びバケット角センサ223と各フロント部材231〜233との相対的な位置関係、及び、車体傾斜センサ224と上部旋回体200Aとの相対的な位置関係)などの情報とを用いることでフロント部材231〜233の姿勢(例えば、対地角)および及び上部旋回体200Aの傾斜角(例えば、水平面などの基準面に対する上部旋回体200Aの傾斜角情報)を知ることができる。
上部旋回体200Aを構成する旋回フレーム31上には、エンジン等の原動機33と、原動機33によって駆動される油圧ポンプ34と、油圧ポンプ34から吐出されてブームシリンダ211、アームシリンダ212、バケットシリンダ213、旋回油圧モータ32及び左右の走行油圧モータ250a,250bなどの油圧アクチュエータに供給される作動油の方向及び流量を制御するコントロールバルブ35とが配置されており、油圧回路システムが構成されている。また、上部旋回体200Aには、油圧ショベル4の起動や停止、動作全般などを制御する車体コントローラ202が配置されており、各油圧アクチュエータ211〜213,32,250a,250bの動作制御は、それぞれの操作に対応した操作レバー装置5から出力される操作信号に基づいて車体コントローラ202によりコントロールバルブ35を制御することで行われる。
上部旋回体200Aを構成する旋回フレーム31上の前部であって、作業装置201のブーム231の基端の支持部の横側(本実施の形態では左側)には、オペレータが搭乗して油圧ショベル4の運転を行うための運転室205が配置されている。運転室205には、操作レバー装置5のほかに、オペレータに各種情報を伝達するためのモニタなどの表示装置204などが配置されている。
また、上部旋回体200Aの上部には、測位衛星6からの電波を受信し、後述する位置検出部902に出力するGPSアンテナ50が備えられている。位置検出部902は、測位衛星6から受信した電波を復調して測位信号を抽出し、複数の測位衛星6からの測位信号に基づいて位置情報を算出するGPS受信機としての機能を有しており、GPSアンテナ50で得られた受信信号から車体本体200の絶対位置を算出し、位置情報として出力する。
なお、図示しないが、上部旋回体200Aには、施工管理システム1のサーバコンピュータ2と通信回路網16を介して通信するための通信端末が備えられており、サーバコンピュータ2から設計地形データや現況地形データ等の電子情報を取得すると共に、GPS(位置検出部902)によって取得した車体本体200の絶対位置をサーバコンピュータ2に出力する。
図3は、施工管理システムの処理内容を示す機能ブロック図である。
施工管理システム1のサーバコンピュータ2は、通信回路網16を介して施工現場の油圧ショベル4(作業機械)、携帯型情報端末7、情報端末8、及び、ドローン10とデータ通信可能なインターフェース(図示せず)を備えている。また、サーバコンピュータ2は、通信回路網16を介して施工会社12の情報端末13、及び、サービスセンタ14の情報端末15とデータ通信可能なインターフェース(図示せず)を備えている。
図3において、サーバコンピュータ2は、油圧ショベル4から出力された車体本体200の位置情報を取得する位置情報取得部301と、施工現場3の現況地形を示す測量図面等を記憶する現況地形情報記憶部302aと、現況地形情報記憶部302aに記憶された測量図面に基づいて現況地形データを取得する現況地形データ取得部302と、施工現場3の設計図面等を記憶する設計図面記憶部303aと、設計図面記憶部303aに記憶された設計図面に基づいて設計地形データを取得する設計地形データ取得部303とを有している。
また、サーバコンピュータ2は、施工現場3で稼働する作業機械(ここでは、油圧ショベル4)の種別や車格などの原単位データを記憶する原単位データ記憶部304と、施工現場3で予め取得した土質データや気象データ等の変動要因データを記憶する変動要因データ記憶部305とを有している。
さらに、サーバコンピュータ2は、現況地形データと設計地形データとを照合し、原単位データと変動要因データに応じて施工計画データを算出する施工計画データ算出部306と、施工計画データと車体本体200の位置情報とを照合し、油圧ショベル4が作業するための目標地形データを算出する目標地形データ算出部307と、変動要因データや目標地形データなどに基づいて油圧ショベル4が作業するための作業装置201の目標速度を含む目標機械データを算出する目標機械データ算出部309と、目標地形データ算出部307で算出された目標地形データに目標機械データ算出部309で算出された目標機械データを付加して油圧ショベル4に出力する出力装置308とを有している。
ここで、施工管理システム1で扱う現況地形データ、設計地形データ、変動要因データ、施工計画データ、目標地形データ、及び、目標機械データについて説明する。
現況地形データは、例えば、ドローン10に設けられたカメラ11で撮像された画像データや測量図面などの現況地形情報記憶部302aに記憶された現況地形を表す情報を現況地形データ取得部302で取得し、取得した情報に種々の処理を施して、例えば、点群等で表される所定のフォーマットのデータに変換することにより生成する。なお、本実施の形態では、現況地形データ取得部302は、現況地形を表す情報を現況地形情報記憶部302aから取得する場合を例示して説明したが、これに限られず、例えば、ドローン10のカメラ11で撮影された画像データを無線通信などによって直接的に取得するように構成してもよい。
設計地形データは、設計図面記憶部303aに記憶された施工現場3の設計図面を設計地形データ取得部303で取得し、取得した設計図面に種々の処理を施して、例えば、例えば、点群等で表される所定のフォーマットのデータに変換することにより生成する。なお、本実施の形態では、設計地形データ取得部303は、設計図面を設計図面記憶部303aから取得する場合を例示して説明したが、これに限られず、例えば、施工会社12で作成した施工現場3の設計図面を施工会社12の情報端末13からインターネットを介して直接的に取得するように構成しても良い。
原単位データは、施工現場3で稼働する作業機械の種類や車格などの情報を含むデータであり、施工現場3で稼動する作業機械(ここでは、油圧ショベル4)の作業能力を表す指標となるデータである。原単位データ記憶部304には、例えば、作業機械が油圧ショベル4である場合、車格とバケット種別等に応じて設定された切土量(一回で掘削可能な量)、盛土量(一回で盛ることができる土砂の量)、最大掘削速度(バケット233の爪先233Pの最大速度)、最大掘削力(例えば、エンジン33や油圧ポンプ34の最大トルク)が原単位データとして記憶されている。なお、これらの原単位データは、施工現場3で稼動する可能性のある種類の作業機械の全てについてサーバコンピュータ2の原単位データ記憶部304に予め記憶していても良いが、施工現場3における作業機械の稼働状況に応じて原単位データ記憶部304に記憶されている原単位データを逐次変更するようにしても良い。
変動要因データは、施工現場3の土質データや気象データを含むデータであり、施工現場3で稼動する作業機械(ここでは油圧ショベル4)の作業能力に与える影響を表す指標となるデータ(すなわち、作業能力に変動を与えうる要因に関するデータ)であり、変動要因データ記憶部305に記憶されている。土質データは、例えば、施工現場3における施工前に実施されるボーリング調査の結果の情報を含むデータである(後の図5参照)。また、気象データは、例えば、気象庁や気象会社から取得した日照時間や降水量などの情報を含むデータである(後の図6参照)。
施工計画データは、施工現場3における土砂の切士計画データ、及び、土砂の盛土計画データを含むデータである。切土計画データは、例えば、施工範囲における土砂の切土(掘削)を行う部位を示すデータであり、盛土計画データは、土砂の盛土(補填)を行う部位を示すデータである。なお、ここでいう施工範囲における部位とは、例えば、施工範囲に水平方向のx軸及びy軸と垂直方向のz軸とで設定した3次元座標系における位置であり、水平方向の位置と垂直方向の位置(深さや高さ)の情報により構成されている。
施工計画データは、施工計画データ算出部306で設計地形データ取得部303から出力された設計地形データと現況地形データ取得部302から出力された現況地形データとを参照し、原単位データと変動要因データを加味して切士計画データや盛土計画データを油圧ショベル4による施工範囲を示すデータに変換することにより生成する。
目標地形データは、施工計画データと油圧ショベル4の車体本体200の位置を照合し、油圧ショベル4の施工範囲に応じて施工計画データの一部を抽出したものである。なお、施工計画データから目標地形データとして抽出する範囲は、油圧ショベル4に出力可能なデータ容量や通信速度に応じて設定することが望ましい。
目標機械データは、変動要因データと目標地形データを照合して算出する。算出された目標機械データは、油圧ショベル4が作業するための目標速度を含むデータである。なお、目標機械データ算出部309、及び、目標機械データの詳細については後述する。
次に、図4〜図6を用いて、施工管理システム1で扱う、現況地形データ、設計地形データ、施工計画データ、目標地形データなどの各地形データの詳細および関係について説明する。
図4は、各地形データの相対関係を示す模式図である。
図4では、油圧ショベル4の周辺地形の縦断面図を模式的に示している。なお、施工管理システム1で扱う各データは所定のフォーマットに従う点群であり、油圧ショベル4について考える場合には、図4に示すように、X軸に油圧ショベル4の前方(例えば、油圧ショベル4のブーム231、アーム232、バケット233で構成される作業装置201が向いている方向)の水平方向の座標を、Z軸に鉛直方向の座標(例えば、標高)を示す。
図4では、施工現場3のうち、X=A,B,C,D,E,Fの6地点における各地形データを抜き出して示している。すなわち、図4では、現況地形データ取得部302で取得した現況地形データのうち、油圧ショベル4の周辺データ、すなわち、Z=h0上の6地点(それぞれ、X=A,B,C,D,E,F)のものを抜き出して示している。同様に、設計地形データ取得部303で取得した設計地形データのうち、油圧ショベル4の周辺データ、すなわち、Z=hf上の6地点のものを抜き出して示している。
目標地形データ算出部307で抽出する目標地形データの範囲、すなわち、油圧ショベル4の施工範囲を、例えば、図4に示したX=A,・・・,Fの範囲とすると、施工計画データ算出部306では、油圧ショベル4の種別や車格に応じて1回目の作業における施工計画データ(施工現場3におけるZ=h1の全データに相当)を算出し、目標地形データ算出部307では算出した施工計画データと油圧ショベル4の車体本体200の位置を照合して1回目の目標地形データとしてZ=h1上のX=A,・・・,Fにそれぞれ対応する6地点を抽出する。同様に、施工計画データ算出部306では油圧ショベル4の種別や車格に応じて2回目の作業における施工計画データ(施工現場3におけるZ=h1のデータに相当)を算出し、目標地形データ算出部307では算出した施工計画データと油圧ショベル4の車体本体200の位置を照合して2回目の目標地形データとしてZ=h1上のX=A,・・・,Fにそれぞれ対応する6地点を抽出する。
このように、施工管理システム1では、現況地形データと設計地形データ、及び、油圧ショベル4の種別や車格に応じて複数の施工計画データを算出し、算出した施工計画データと油圧ショベル4の車体本体200の位置を照合することにより油圧ショベル4の周辺の目標地形データを算出する。
図5は、変動要因データの1つである土質データの一例を模式的に示す図である。
図5では、油圧ショベル4の周辺地形の縦断面図を模式的に示している。なお、施工管理システム1で扱う各データは所定のフォーマットに従う点群であり、油圧ショベル4について考える場合には、図5に示すように、X軸に油圧ショベル4の前方(例えば、油圧ショベル4のブーム231、アーム232、バケット233で構成される作業装置201が向いている方向)の水平方向の座標を、Z軸に鉛直方向の座標(例えば、標高)を示す。なお、図5で示す座標軸や各地形データ、各地点などは図4とそれぞれ対応している。
変動要因データ記憶部305には、施工前に実施されたボーリング調査の結果が、例えば、図5に示す形式で格納されている。図5は図4の各地形データと対応している。図5に示す土質データでは、土質の分布は水平方向の各地点(X=A,B,C,D,E,F)で異なっている場合を例示している。図5に示す土質データの例えばA地点では、Z=h0〜原点Oの間では概ね砂質で柔らかく、Z=原点O〜h2の間では概ね砂利質で砂質よりも固い構成であることがわかる。また、設計図面に近い深い領域Z=h2〜hfの間では概ね粘土質であり、かなり固い構成であることがわかる。このように、変動要因データ記憶部305には土質データとして、施工現場3の各地点の土質を示す情報(例えば、土質に関する分類名や固さを示す数値等)が3次元データとしてマッピングされたデータ(土質データマップ)が記憶されている。
図6は、変動要因データの1つである気象データの一例として降水量データを示す図である。
図6では、降水量データとして、ある地方の所定の計測地点における1時間前、3時間前、24時間前、48時間前、及び、72時間前から現時点までの降水量の一例を示している。また、降水量データには、予め設定した施工現場3から各計測地点までの距離も含まれており、施工現場3に近い計測地点がわかるようになっている。例えば、図6においては、施工現場3からの距離が最も近いのは計測地点X4であり、この計測地点X4の現時点までの24時間の降水量は0mmであることがわかる。また、計測地点X4の現時点までの48時間および72時間の降水量は共に60mmであり、現時点からみて48時間前〜24時間前の間に降水量が多かったことがわかる。
変動要因データ記憶部305には、例えば、施工現場3からの距離が最も近い計測地点X4の降水量データが、図6に示す時間経過に応じたテーブル(降水量データテーブル)として記憶されており、サーバコンピュータ2とインターネットを介して所定のタイミングで更新されるように構成されている。
図3Aは、施工計画データ算出部の処理を示すフローチャートである。
図3Aにおいて、施工計画データ算出部306は、まず、設計地形データ取得部303から設計地形データを取得するとともに(ステップS100)、現況地形データ取得部302から現況地形データを取得する(ステップS110)。
続いて、設計地形データと現況地形データとから、切土計画データと盛土計画データとを算出する(ステップS120)。切土計画データは施工範囲における土砂の切土(掘削)を行う部位を示すデータ、盛土計画データは土砂の盛土(補填)を行う部位を示すデータであり、例えば、現況地形データと設計地形データの差分から算出することができる。すなわち、現況地形データと設計地形データの各部位における差分をその差分の正負によって分別することで、施工範囲における土砂の切土(掘削)を行う部位(切土計画データ)と土砂の盛土(補填)を行う部位(盛土計画データ)とを算出することができる。
続いて、原単位データ記憶部304から原単位データ読み込むとともに(ステップS130)、変動要因データ記憶部305から変動要因データを読み込む(ステップS140)。
続いて、原単位データと変動要因データとを加味しつつ、切土計画データと盛土計画データを変換することによって、施工計画データを算出する(ステップS150)。施工計画データは、3次元空間における作業機械4が施工する範囲(すなわち、掘削や補充を行う部位)を、施工範囲に水平方向のx軸及びy軸と垂直方向のz軸とで設定した3次元座標系における位置で示すデータであり、原単位データ(すなわち、油圧ショベル4の作業能力の指標となるデータ)を加味することにより、切土計画データと盛土計画データを図4で説明したような段階的な複数の施工計画データに変換する。本実施の形態においては変換方法を限定しないが、例えば、原単位データに示される最大掘削速度や最大掘削力などが大きくなるほど1回の作業における作業量が大きくなるように施工計画データを算出するように構成することが考えられる。なお、施工計画データ算出部306では、施工現場3の全体について施工計画データを算出するが、図4ではその一部(目標地形データに相当)を例示して示している。
図3Bは、目標地形データ算出部の処理を示すフローチャートである。
図3Bにおいて、目標地形データ算出部307は、まず、施工計画データ算出部で算出された施工計画データを取得するとともに(ステップS200)、位置情報取得部301から油圧ショベル4の位置情報を読み込む(ステップS210)。続いて、位置情報に基づく油圧ショベル4の施工範囲に応じて施工計画データの一部(すなわち、油圧ショベル4の周囲の一定範囲の施工計画データ)を目標地形データ(図4参照)として抽出する(ステップS220)。
図7は、目標機械データ算出部の処理内容を示すブロック図である。
図7において、目標機械データ算出部309は、変動要因データ記憶部305に変動要因データとして記憶された土質データマップと目標地形データ算出部307で算出された目標地形データの点群座標とから、油圧ショベル4の施工範囲の土質に関する情報を抽出(推定)する土質抽出部309aと、土質抽出部309aで抽出した土質の情報に基づき、予め定めた土質出力変換テーブルを用いて出力を算出する出力算出部309bと、変動要因データ記憶部305に変動要因データとして記憶された気象データのうち、例えば、降水量データテーブルに基づいて、油圧ショベル4の施工範囲の過去の降水量を見積もる降水量算出部309cと、降水量算出部309cで算出された降水量に基づき、予め定めた出力補正係数テーブルを用いて出力補正係数を算出する出力補正係数算出部309dと、出力算出部309bで算出された出力を出力補正係数算出部309dで算出された出力補正係数で補正して出力する出力補正部309eとを有している。
例えば、図4に示した目標地形データ(油圧ショベル4の周辺地形の縦断面)において、Y座標をYshとすると、各地点(X=A,・・・,F)における点群座標は、(Xa,Ysh,Za)、・・・、(Xf,Ysh,Zf)で表される。土質抽出部309aでは、図5に示した土質データマップ(土質の分布を示すマップ)において、点群座標を用いることにより各地点の土質を推定する。例えば、1回目の作業における目標地形データを例として考えると、A地点では高さZ=h1において土質は砂質であると推定する。また、C地点では高さZ=h1において砂質もしくは砂利質の中間の土質であると推定する。
出力算出部309bでは、土質抽出部309aから出力された土質の情報と土質出力変換テーブルとに基づいて、油圧ショベル4が作業する際に推奨される目標出力を算出する。なお、各油圧アクチュエータ211〜213,32,250a,250bの駆動速度と出力の大きさとは関係性があるため、目標出力は油圧アクチュエータ211〜213,32,250a,250bの目標速度(例えば、バケット233の爪先233Pの目標速度)の一形態と考えることができる。したがって、以降の説明においては、油圧アクチュエータの目標速度を目標出力と記載する場合や目標出力(目標速度)などと記載することがある。また、出力算出部309bでは、各油圧アクチュエータ211〜213,32,250a,250bの駆動速度と関係性のある目標掘削速度や目標掘削力等の値を目標速度の他の形態として算出してもよい。例えば、施工現場3で稼働する油圧ショベル4の油圧システム(作業装置を駆動する油圧アクチュエータを制御するシステム)がオープンセンタ方式の場合は、圧油の流量をコントロールするシステムのため、目標掘削速度を目標速度の一形態として算出して出力することが望ましい。一方で、クローズドセンタ方式の場合は、圧油の圧力をコントロールするシステムのため、目標掘削力を目標速度の一形態として算出して出力することが望ましい。なお、これらの方式は、油圧ショベル4の種別を表す原単位データによって判断可能である。
出力算出部309bに予め設定する土質出力変換テーブルは、例えば、土質が砂質の場合は柔らかく、作業装置201による掘削速度や掘削力が大きすぎると崩れてしまう懸念があるため、目標出力(目標速度、目標掘削速度、目標掘削力)として低出力値を出力するよう設定されたものが推奨される。また、土質出力変換テーブルは、土質が粘土質の場合は固く、掘削速度や掘削力が小さすぎると作業精度が粗くなるため、目標出力(目標速度、目標掘削速度、目標掘削力)として高出力値を出力するよう設定されたものが推奨される。
出力補正係数算出部309dでは、降水量算出部309cで算出された降水量降水量と出力補正係数テーブルとに基づいて出力補正係数を算出する。一般的には、直近の降水量が多ければ多いほど土砂が重くなるため、油圧ショベル4の掘削速度や掘削力を増加させる必要がある。また、長期間にわたり降水量がゼロの場合は、土砂が完全に乾燥して固くなるため、油圧ショベル4の掘削速度や掘削力を増加させる必要がある。なお、本実施の形態では説明の簡単のため、気象データとして日照時間(直射日光が地表を照射した時間)を用いる場合については説明を省略するが、例えば、変動要因データ記憶部305に気象データとして記憶した日照時間データテーブルから得られる日照時間の情報を出力補正係数算出部309dでさらに取得し、降水量と日照時間とに基づいて出力補正係数を算出するように構成してもよい。
出力補正部309eでは、出力算出部309bで算出された目標出力(目標速度)を出力補正係数算出部309dで算出された出力補正係数で補正し、目標機械データ算出部309の出力である目標機械データとして出力する。なお、出力補正部309eの出力値(目標機械データ)は、出力算出部309bの出力である目標出力(目標速度)を補正したものであり、油圧ショベル4の作業範囲の各地点における油圧ショベル4の目標出力(Pa,・・・,Pf)や、掘削速度(Va,・・・,Vf)、或いは掘削力(Fa,・・・,Ff)等、油圧ショベル4が作業する際の指標を示す値である。
図8は、目標機械データ算出部から出力される目標機械データの一例を模式的に示す図である。
図8においては、油圧ショベル4の周辺地形の縦断面図を模式的に示している。なお、施工管理システム1で扱う各データは所定のフォーマットに従う点群であり、油圧ショベル4について考える場合には、図5に示すように、X軸に油圧ショベル4の前方(例えば、油圧ショベル4のブーム231、アーム232、バケット233で構成される作業装置201が向いている方向)の水平方向の座標を、Z軸に鉛直方向の座標(例えば、標高)を示す。なお、図8で示す座標軸や各地形データ、各地点などは図4及び図5とそれぞれ対応している。
目標機械データ算出部309で算出した目標機械データは、油圧ショベル4が作業する際の指標として、例えば、図8に示す形式で算出される。図8に示すように、目標機械データは、油圧ショベル4に推奨される目標速度(目標出力、目標掘削速度、目標掘削力)の高低がわかるような形式、すなわち、高低を段階的に示した形式(例えば、High、Middle、Lowの3段階)でマッピングされている。
例えば、図8において、1回目の作業における目標地形データの近傍(Z=h1付近)を例として考えると、図5におけるA地点は砂質になっているため、目標機械データとしては「Low」が出力され、ゆっくりと掘削することが推奨される。また、図5におけるC地点は砂質もしくは砂利質の中間層になっているため、目標機械データとしては「Low/Middle」が出力され、通常よりも弱めに掘削することが推奨される。
また、2回目の作業における目標地形データの近傍(Z=h2付近)を例として考えると、図5におけるA地点は砂利質と粘土質の中間層になっているため、目標機械データとしては「Middle/High」が出力され、通常よりも強めに掘削することが推奨される。また、図5におけるB地点は粘土質になっているため、目標機械データとしては「High」が出力され、速く力強い掘削が推奨される。
なお、本実施の形態においては、目標機械データをHigh、Middle、Lowの3段階とする場合を例示したが、3段階以外の段階に設定してもよい。また、各段階に数値を設定しても良く、例えば、目標機械データとして油圧アクチュエータの目標速度を考える場合には、High、Middle、Lowのそれぞれの段階に相当する値として、例えば、700mm/sec、400mm/sec、150mm/secが出力されるようにしても良い。
出力装置308は、目標地形データに目標機械データを付加して出力することを特徴とする。目標地形データ算出部307において、1回目の目標地形データが算出されている場合、出力装置308は目標地形データとしてZ=h1の6地点(X=A,・・・,F)に加え、図8の破線で示す部分(現況地形データ近傍から目標地形データ(1st)近傍まで)の目標機械データを油圧ショベル4に出力する。この方式により、油圧ショベル4では目標地形データ近傍までの目標機械データを取得することが可能となり、目標地形データの近傍で油圧ショベルに推奨される出力、掘削速度、掘削量等の指標をオペレータに提示することができるため、ガイダンス部905の性能を向上することができる。
図7Aは、目標機械データ算出部の処理を示すフローチャートである。
図7Aにおいて、目標機械データ算出部309の土質抽出部309aは、まず、目標地形データ算出部307で算出された目標地形データを読み込むとともに(ステップS300)、変動要因データ記憶部305に変動要因データの一つとして記憶された土質データマップを読み込み(ステップS310)、目標地形データを構成する点群座標に対応する部位の土質を抽出する(ステップS320)。土質抽出部309aで抽出される土質に関するデータは、目標地形データのX座標がX=A,・・・,Fである部位に関するものである場合には、図5に示したように、各部位におけるZ軸方向の土質を示すデータとなり、例えば、A地点における土質は、高さZ=h1では砂質、Z=0においては砂質もしくは砂利質の中間、Z=h2においては砂利質と粘土の中間、Z=hfにおいては粘土となる。
続いて、出力算出部309bは、原単位データ記憶部304から原単位データ読み込み(ステップS330)、土質抽出部309aの抽出結果(土質に関するデータ)から土質出力変換テーブルに基づいて目標出力(目標速度)を算出する(ステップS340)。出力算出部309bで算出される目標出力(目標速度)は、油圧ショベル4が作業する際の指標である目標機械データと同様の形式、すなわち、図8に示した形式で算出される。すなわち、目標出力(目標速度)は、目標機械データと同様に、油圧ショベル4に推奨される目標速度(目標出力、目標掘削速度、目標掘削力)の高低がわかるような形式、すなわち、高低を段階的に示した形式(例えば、High、Middle、Lowの3段階)でマッピングされている。
続いて、降水量算出部309cは、変動要因データ記憶部305に変動要因データの一つとして記憶された降水量データテーブルを読み込み(ステップS350)、降水量データテーブルから出力補正係数テーブルに基づいて補正係数を算出する(ステップS360)。例えば、施工現場3の直近の降水量が多ければ多いほど土砂が重くなるため、油圧ショベル4の掘削速度や掘削力を増加させるような補正係数を算出する。また、長期間にわたり降水量がゼロの場合は、土砂が完全に乾燥して固くなるため、油圧ショベル4の掘削速度や掘削力を増加させるような補正係数を算出する。
続いて、出力補正部309eは、出力算出部309bで算出された目標出力(目標速度)に出力補正係数算出部309dで算出された補正係数を反映し、目標機械データ算出部309の出力である目標機械データとして出力する(ステップS370)。補正係数の反映方法は、出力算出部309bで算出された目標出力(目標速度)の形式によって異なるが、例えば、油圧ショベル4の掘削速度や掘削力を増加させるような補正係数の場合を考えると、出力算出部309bで算出された目標出力(目標速度)を一段階増加させる、すなわち、HighはHighに、MiddleはHighに、LowはMiddleに増加させることが考えられる。また、目標機械データとして油圧アクチュエータの目標速度を考える場合には、High、Middle、Lowのそれぞれの段階に相当する値として各段階に設定された数値に補正係数を乗算することも考えられる。
次に、本発明の一実施の形態に係る油圧ショベルの処理システムについて説明する。
図9は、油圧ショベルの処理システムの処理内容を示す機能ブロック図である。
油圧ショベル4における処理システムの各機能は、図2に示した油圧ショベル4の例えば、車体コントローラ202により適宜実現されている。なお、車体コントローラ202により実現される処理システムは、通信回路網16(例えば、衛星通信回路を含むインターネット通信網など)を介してサーバコンピュータ2や施工現場3の携帯型情報端末7、情報端末8などとデータ通信可能なWi−Fiなどのインターフェース(図示せず)を備えている。
図9において、油圧ショベル4の処理システムである車体コントローラ202は、GPSアンテナ50の受信結果に基づいて油圧ショベル4のグローバル座標系における絶対位置を検出する位置検出部902と、位置検出部902の検出結果、すなわち、油圧ショベル4のグローバル座標系における位置情報(絶対位置)をサーバコンピュータ2に出力する位置出力部903と、サーバコンピュータ2で算出、出力されて油圧ショベル4で受信した目標地形データ取得部904と、油圧ショベル4で受信した目標地形データに付加された目標機械データを抽出して取得する目標機械データ取得部906と、姿勢センサ221〜224からの検出結果に基づいて作業装置201および車体本体200の姿勢情報を取得する姿勢検出部901と、姿勢検出部901で検出した姿勢情報と位置検出部902で検出した位置情報と目標地形データ取得部904で取得した目標地形データと目標機械データ取得部906で取得した目標機械データとに基づいて、作業装置201を駆動する油圧アクチュエータの目標速度を含む目標アクチュエータ速度を設定する目標アクチュエータ出力設定部907と、姿勢検出部901で検出した姿勢情報と位置検出部902で検出した位置情報と目標地形データ取得部904で取得した目標地形データとに基づいて作業装置201での掘削における目標面を設定し、目標アクチュエータ出力設定部907で設定した目標アクチュエータ出力を目標面の情報とともに付加情報として表示装置204に出力して表示することによりオペレータに伝達するガイダンス部905とを備えている。
位置検出部902は、姿勢情報として、車体傾斜(車体本体200のロール角、ピッチ角、ヨ一角)と、ブーム231、アーム232、及びバケット233の対地角から算出される各リンクの角度であるリンク角度とを算出して出力する。また、ガイダンス部905は、油圧ショベル4の周辺の目標地形データからバケット爪先付近のデータを抽出して目標面を設定し、この目標面とバケット233の爪先233Pとの位置関係を運転室205内に配置されたモニタ等の表示装置204に表示して伝達することによりオペレータを支援する。
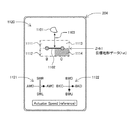
図10は、目標アクチュエータ出力設定部の処理内容を示す機能ブロック図である。
図10において、目標アクチュエータ出力設定部907は、姿勢検出部901で検出した姿勢情報(車体傾斜、リンク角度)、及び、位置検出部902で検出した車体本体200の位置情報(絶対位置)に基づいて、バケット233の爪先233Pの位置を算出する爪先位置算出部1001と、目標地形データ取得部904で取得した目標地形データと爪先位置算出部1001で算出したバケット233の爪先233Pの位置(爪先位置)をと比較して目標面を設定する目標面設定部1002と、目標機械データ取得部906で取得した目標速度(バケット233の爪先233Pの目標速度)、目標面設定部1002で設定した目標面、及び、爪先位置算出部1001で算出した爪先位置に基づいて、目標面に対して爪先位置が追従するように、かつ、可能な限り目標速度を実現するように作業装置201の各油圧アクチュエータ211〜213を動作させるための制御速度(バケット233の爪先233Pの推奨速度)を算出して出力する姿勢制御部1003と、姿勢制御部1003で算出した制御速度、及び、姿勢検出部901からのリンク角度に応じて各油圧アクチュエータ211〜213の速度(ブーム231、アーム232、バケット233の角速度)を設定し、目標速度を含めて目標アクチュエータ速度として出力する目標アクチュエータ速度設定部1004とを有している。
爪先位置算出部1001は、予め記憶されている作業装置201の各フロント部材231〜233の寸法値とリンク角度を用いて、ブームピン241を基準とする座標系における爪先233Pの位置を幾何学的に算出し、算出された爪先233Pの位置を、車体傾斜を加味して車体本体200の位置を表す座標系(車体座標系)上の位置に変換することによりバケット233の爪先233Pの位置(爪先位置)を算出する。
目標面設定部1002は、例えば、目標地形データとして、図5におけるZ=h1上の6地点(X=A,・・・,F)が与えられたとすると、この点群データからバケット233の爪先233Pの位置(爪先位置)に近い複数の点を選択し、これらの点を結ぶことによって目標面を生成する。
姿勢制御部1003は、例えば、目標面と爪先位置の偏差に応じたフィードバック指令値を算出するフィードバック制御を行い、目標速度に対してフィードバック指令値を加算することにより制御速度を算出する。
目標アクチュエータ速度設定部1004は、例えば、ロボットアームの分野で良く知られているヤコビ行列等を用いた運動学モデルを用い、制御速度と各リンク角度とに応じて各油圧アクチュエータ211〜213の速度(ブーム231、アーム232、及び、バケット233の角速度)を算出する。なお、本実施の形態では図示及び説明を省略するが、目標アクチュエータ速度として旋回速度を含んで設定する場合もある。
図11は、表示装置における表示の一例を示す図である。
表示装置204は、作業機械の一つである油圧ショベル4の運転室205内に配置され、ガイダンス部905からの目標面や、目標面とバケット233の爪先233Pとの位置関係、爪先233Pの目標速度などの情報を表示することによりオペレータに伝達するものである。図11においては、表示装置204に、目標面とバケット233の爪先233Pとの位置関係、目標速度などの情報が表示される支援情報表示部1120と、各油圧アクチュエータ211〜213,32の目標速度を示す目標操作量ゲージ1121,1122が表示されている場合を例示している。
支援情報表示部1120には、目標面を模式的に示す目標面画像1102と、目標面に対する爪先233Pの相対位置を模式的に示すバケット画像1101とが表示されている。このように、支援情報表示部1120にバケット画像1101と目標面画像1102を合わせて表示することにより、バケット233の爪先233Pと目標面の距離1103を、オペレータが視覚的、直感的に認識できる。
また、支援情報表示部1120には、目標面画像1102の周辺に油圧ショベル4が作業する際の目標速度を示す目標速度伝達領域1111〜1114が表示されている。図11の例では、目標面画像1102の左側上方、左側下方、右側上方、及び、右側下方に、目標速度伝達領域1111,1112,1113,1114がそれぞれ配置されている。目標速度伝達領域1111〜1114の目標速度の表示方法としては、目標速度の大きさに応じて表示方法を段階的に変えることによってオペレータが目標速度を視覚的、直感的に認識できる表示であれば良いが、例えば、目標速度が小さい場合(図8のLowに相当)には無地の領域(例えば、目標速度伝達領域1111〜1113)で表示し、目標速度が中程度の場合(図8のMiddleに相当)には、他の領域と異なる色や濃度、ハッチングなど(例えば、図11の目標速度伝達領域1114に薄いハッチングで示すような表示方法)で表示する。また、目標速度が大きい場合(図8のHighに相当)には、他の目標速度の場合とさらに異なる色や濃度、ハッチングなどで目標速度伝達領域1111〜1113を表示する。
図11においては、目標地形データとして図5に示すZ=h1上の6地点(X=A,・・・,F)が与えられており、バケット233の爪先233Pの位置が図5における地点Bと地点Cの間、かつ、目標地形データ(Z=h1)よりも上方にある状態を例示している。このとき、Z=h1上の6地点(X=A,・・・,F)の点群データから、バケット233の爪先233Pの位置に近い2点(地点Bおよび地点C)が選択され、これらの点を結ぶことによって目標面が生成される。
目標操作量ゲージ1121,1122は、各油圧アクチュエータ211〜213,32の目標速度に対応する操作レバー装置5の目標操作量を表示しており、運転室205に配置された操作レバー装置5の位置および操作方向に対応するように、すなわち、オペレータが感覚的に分かりやすいように、左側の目標操作量ゲージ1121には、右旋回(SWR)、左旋回(SWL)、アームダンプ(AMD)、及び、アームクラウド(AMC)の各操作に対応する目標速度に関する情報が、右側の目標操作量ゲージ1122には、ブーム下げ(BMD)、ブーム上げ(BMU)、バケットクラウド(MKC)、及び、バケットダンプ(BKD)の各操作に対応する目標速度に関する情報がそれぞれ表示されている。また、各目標操作量ゲージ1121,1122では、目標アクチュエータ出力設定部907で設定した目標アクチユエータ速度(ブーム231、アーム232、及び、バケット233の角速度、及び上部旋回体200Aの旋回速度)の目標速度に対応する目標操作量に応じて、その速度(操作量)の大小がわかるように、目標操作量ゲージ1121,1122に黒のマーカーをプロットしている。なお、図11では、旋回操作が不要な状態を例示しているため、旋回の目標操作量として白のマーカーが目標操作量ゲージ1121の原点(基準位置)付近にプロットされている。
このように、バケット233の爪先233Pと目標面の距離の上方に加えて、バケット233の爪先233Pの目標速度、及び、各油圧アクチュエータ(ブーム231、アーム232、バケット233)の目標速度に対応する目標操作量を表示することにより、適切な作業を行うための指標をオペレータに提供できるため、油圧ショベル4の作業効率を向上することができる。
なお、油圧ショベル4の例えば車体コントローラ202には、目標アクチュエータ出力設定部907で設定した目標アクチュエータ出力に応じて各油圧アクチュエータ211〜213,32の出力を制御するアクチュエータ出力制御部202Aが備えられている。アクチュエータ出力制御部202Aでは、目標アクチュエータ出力設定部907で設定した各油圧アクチュエータの速度(ブーム231、アーム232、及び、バケット233の角速度)を各シリンダの速度(ブームシリンダ211、アームシリンダ212、及び、バケットシリンダ213の速度)に変換し、変換した速度を実現するように各油圧シリンダ211〜213を駆動する。例えば、油圧ショベル4で良く知られている油圧パイロット方式の場合には、パイロット圧を制御する電磁弁の駆動電流を制御することにより各油圧シリンダ211〜213の速度を所定の値に制御する。このように、車体コントローラ202に実装されたアクチュエータ出力制御部202Aによって、目標アクチュエータ出力設定部907で設定した各油圧アクチュエータ211〜213の速度を制御することができるため、オペレータの操作をより適切にアシストすることが可能となり、油圧ショベル4の作業効率を向上することができる。
なお、本実施の形態の施工管理システム1においては、目標機械データを付加した目標地形データをサーバコンピュータ2で生成して油圧ショベル4に出力する場合を例示して説明したがこれに限られず、例えば、目標機械データおよび目標地形データの少なくとも一方を油圧ショベル4の処理システムである車体コントローラ202で生成するように構成してもよい。すなわち、例えば、油圧ショベル4の車体コントローラ202に、現況地形データ取得部302、設計地形データ取得部303、原単位データ記憶部304、変動要因データ記憶部305、施工計画データ算出部306、目標地形データ算出部307、目標機械データ算出部309の各機能部を配置し、それらの各機能部で必要な情報を通信機能などにより適宜外部から取得して、油圧ショベル4の車体コントローラ202で目標機械データおよび目標地形データを生成することが考えられる。或いは、油圧ショベル4の車体コントローラ202に上記各機能部の少なくとも一部を配置し、目標機械データや目標地形データの生成の工程の一部を油圧ショベル4の車体コントローラ202で行うように構成してもよい。
以上のように構成した本実施の形態の特徴を説明する。
(1)上記の実施の形態では、作業機械で利用される情報を算出するサーバコンピュータ2を備えた施工管理システム1において、前記サーバコンピュータは、施工現場で稼動する作業機械(例えば、油圧ショベル4)から出力される前記作業機械の位置情報を取得する位置情報取得部301と、前記施工現場の現況地形データを取得する現況地形データ取得部302と、前記施工現場の設計地形データを取得する設計地形データ取得部303と、前記作業機械の少なくとも種類及び車格の情報を含む原単位データを記憶する原単位データ記憶部304と、予め取得した少なくとも土質データ及び気象データの情報を含む変動要因データを記憶する変動要因データ記憶部305と、前記現況地形データ、前記設計地形データ、前記原単位データ、及び、前記変動要因データに基づいて、前記施工現場における土砂の少なくとも切土計画データ及び盛土計画データを含む施工計画データを算出する施工計画データ算出部306と、前記施工計画データと前記位置情報とに基づいて、前記作業機械の作業目標とする目標地形データを算出する目標地形データ算出部307と、前記変動要因データと前記目標地形データとに基づいて、前記作業機械の車体に取り付けられた作業装置の駆動に係る目標速度を含む目標機械データを算出する目標機械データ算出部309と、少なくとも前記目標機械データを前記作業機械に出力する出力部(例えば、出力装置308)とを有するものとした。
(2)また、上記(1)の施工管理システムにおいて、前記サーバコンピュータの前記出力部は、前記目標地形データに前記目標機械データを付加して出力するものとした。
(3)また、上記(1)の施工管理システムにおいて、前記作業機械は、前記作業機械の車体に取り付けられた前記作業装置201と、前記作業装置を駆動するための少なくとも1つのアクチュエータ(例えば、ブームシリンダ211、アームシリンダ212、バケットシリンダ213)とを備え、前記施工管理システムは、前記作業機械の動作を制御する車体コントローラ202と、表示装置とを備え、前記車体コントローラは、前記作業機械および前記作業装置の姿勢情報を検出する姿勢検出部901と、前記作業機械の位置情報を検出する位置検出部と、前記施工管理システムの前記サーバコンピュータの前記出力部から出力された前記目標地形データを取得する目標地形データ取得部904と、前記目標地形データに付加されて前記施工管理システムから出力された前記目標機械データを取得する目標機械データ取得部906と、前記姿勢情報、前記位置情報、及び、前記目標地形データに基づいて、前記作業装置による作業の基準となる目標面を設定し、前記目標面と前記作業装置との位置関係の情報をオペレータに伝達するガイダンス部905と、前記姿勢情報、前記位置情報、前記目標地形データ、及び、前記目標機械データに基づいて、前記作業装置の目標速度を含む目標アクチュエータ出力を設定する目標アクチュエータ出力設定部907とを備え、前記ガイダンス部は、前記目標面に前記目標アクチュエータ出力を付加してオペレータに伝達するものとした。
(4)また、上記(3)の作業機械(例えば、油圧ショベル4)において、前記車体コントローラは、前記目標面に応じて前記作業装置の姿勢を制御する姿勢制御部1003と、前記目標アクチュエータ出力に応じて前記アクチュエータの出力を制御するアクチュエータ出力制御部202Aとをさらに備えるものとした。
(5)また、上記の実施の形態では、施工現場で稼動する作業機械(例えば、油圧ショベル4)であって、前記作業機械の車体に取り付けられた作業装置201と、前記作業装置を駆動するための少なくとも1つのアクチュエータ(例えば、ブームシリンダ211、アームシリンダ212、バケットシリンダ213)と、前記作業機械の動作を制御する車体コントローラ202と、表示装置とを備えた作業機械において、前記車体コントローラは、前記作業機械および前記作業装置の姿勢情報を検出する姿勢検出部901と、前記作業機械の位置情報を検出する位置検出部902と、前記施工現場の現況地形データを取得する現況地形データ取得部302と、前記施工現場の設計地形データを取得する設計地形データ取得部303と、前記作業機械の少なくとも種類及び車格の情報を含む原単位データを記憶する原単位データ記憶部304と、予め取得した少なくとも土質データ及び気象データの情報を含む変動要因データを記憶する変動要因データ記憶部305と、前記現況地形データ、前記設計地形データ、前記原単位データ、及び、前記変動要因データに基づいて、前記施工現場における土砂の少なくとも切土計画データ及び盛土計画データを含む施工計画データを算出する施工計画データ算出部306と、前記施工計画データと前記位置情報とに基づいて、前記作業機械の作業目標とする目標地形データを算出する目標地形データ算出部307と、前記変動要因データと前記目標地形データとに基づいて、前記作業機械の車体に取り付けられた作業装置の駆動に係る目標速度を含む目標機械データを算出する目標機械データ算出部309と、前記姿勢情報、前記位置情報、前記目標地形データ、及び、前記目標機械データに基づいて、前記作業装置の目標速度を含む目標アクチュエータ出力を設定する目標アクチュエータ出力設定部と、前記姿勢情報、前記位置情報、及び、前記目標地形データに基づいて、前記作業装置による作業の基準となる目標面を設定し、前記目標面と前記作業装置との位置関係の情報をオペレータに伝達するガイダンス部905とを備え、前記ガイダンス部は、前記目標面に前記目標アクチュエータ出力を付加してオペレータに伝達するものとした。
<付記>
なお、上記の実施の形態においては、エンジン等の原動機で油圧ポンプを駆動する一般的な油圧ショベルやホイールローダを例に挙げて説明したが、油圧ポンプをエンジン及びモータで駆動するハイブリッド式の油圧ショベルや、油圧ポンプをモータのみで駆動する電動式の油圧ショベルやホイールローダ等にも本発明が適用可能であることは言うまでもない。
また、本発明は上記の実施の形態に限定されるものではなく、その要旨を逸脱しない範囲内の様々な変形例や組み合わせが含まれる。また、本発明は、上記の実施の形態で説明した全ての構成を備えるものに限定されず、その構成の一部を削除したものも含まれる。また、上記の各構成、機能等は、それらの一部又は全部を、例えば集積回路で設計する等により実現してもよい。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することによりソフトウェアで実現してもよい。