以下、図面を参照しながら、一実施形態に係るインクジェットプリンタについて説明する。なお、ここで説明される実施形態は、当然ながら特に本発明を限定することを意図したものではない。また、同じ作用を奏する部材、部位には同じ符号を付し、重複する説明は適宜省略または簡略化する。以下の説明では、インクジェットプリンタを正面から見たときに、インクジェットプリンタから遠ざかる方を前方、インクジェットプリンタに近づく方を後方とする。また、図面中の符号F、Rr、L、R、U、Dは、それぞれ前、後、左、右、上、下を表している。ただし、これらは説明の便宜上の方向に過ぎず、インクジェットプリンタの設置態様等を限定するものではない。
図1は、一実施形態に係る大判のインクジェットプリンタ(以下、「プリンタ」とする。)10の正面図である。プリンタ10は、ロール状の記録媒体5を前後方向に移動させるとともに、左右方向に移動するキャリッジ20に搭載されたインクヘッド50からインクを吐出することによって、記録媒体5上に画像を印刷する。
記録媒体5は、画像が印刷される対象物である。記録媒体5は特に限定されない。記録媒体5は、例えば、普通紙やインクジェット用印刷紙等の紙類であってもよいし、樹脂製やガラス製などの透明なシートであってもよい。金属製やゴム製等のシートであってもよい。また、布帛であってもよい。
図1に示すように、プリンタ10は、キャリッジ20と、キャリッジ移動装置30と、搬送装置40と、インクヘッド50と、キャッピング装置90と、ワイピング装置95と、制御装置100とを備えている。
キャリッジ移動装置30は、ガイドレール31と、ベルト32と、左右のプーリ33aおよび33bと、キャリッジモータ34とを備えている。ガイドレール31には、キャリッジ20が摺動自在に係合している。ガイドレール31は、左右方向に延びている。ガイドレール31は、キャリッジ20の左右方向への移動をガイドする。ベルト32は、キャリッジ20に固定されている。ベルト32は、無端状のベルトである。ベルト32は、ガイドレール31の右側に設けられたプーリ33aおよび左側に設けられたプーリ33bに巻き掛けられている。右側のプーリ33aにはキャリッジモータ34が取り付けられている。キャリッジモータ34は、制御装置100と電気的に接続されている。キャリッジモータ34は、制御装置100によって制御される。キャリッジモータ34が駆動するとプーリ33aが回転し、ベルト32が走行する。それにより、キャリッジ20がガイドレール31に沿って左右方向に移動する。
キャリッジ20の下方には、プラテン12が配置されている。プラテン12は、左右方向に延びている。プラテン12には記録媒体5が載置される。プラテン12上の記録媒体5は、搬送装置40によって前後方向に移動される。搬送装置40は、ピンチローラ41と、グリットローラ42と、フィードモータ43とを備えている。ピンチローラ41はプラテン12の上方に設けられ、記録媒体5を上から押下する。ピンチローラ41は、キャリッジ20より後方に配置されている。プラテン12には、グリットローラ42が設けられている。グリットローラ42は、ピンチローラ41の下方に配置されている。グリットローラ42は、ピンチローラ41と対向する位置に設けられている。グリットローラ42は、フィードモータ43に連結されている。グリットローラ42は、フィードモータ43の駆動力を受けて回転可能に形成されている。フィードモータ43は、制御装置100と電気的に接続されている。フィードモータ43は、制御装置100によって制御される。ピンチローラ41とグリットローラ42との間に記録媒体5が挟まれた状態でグリットローラ42が回転すると、記録媒体5は前後方向に搬送される。
図2は、キャリッジ20の下面の構成を模式的に示す平面図である。図2に示すように、キャリッジ20の下面には、複数のインクヘッド50が設けられている。インクヘッド50は、インクを吐出する部材である。複数のインクヘッド50は、キャリッジ20において左右方向に並んで配置されている。複数のインクヘッド50の下面には、それぞれ、複数のノズル51が形成されている。ノズル51は、インクが吐出される微細な孔である。インクヘッド50の下面は、それぞれ、複数のノズル51が形成されたノズル面50aを構成している。ノズル面50aにおいて、複数のノズル51は前後方向に並んでノズル列を形成している。ここでは、ノズル列は、1つのインクヘッド50につき2列形成されている。ただし、インクヘッド50およびノズル51の配置は上記したものに限定されるわけではない。
図3は、ノズル51周辺の部分断面図である。図3に示すように、ノズル51の近傍には、ケース52と、振動板53と、アクチュエータ54とが設けられている。ケース52は、中空に形成されている。ケース52は、ここでは、上下に配置された2つの部分に仕切られている。ケース52の上方の部分と下方の部分との間には、開口52aが設けられている。ケース52の開口52aよりも下方の部分は、圧力室52bを構成している。ノズル51は、圧力室52bの下壁を上下方向に貫通している。圧力室52bには、インクが収容されている。インク吐出時には、圧力室52bに収容されているインクがノズル51から吐出される。
振動板53は、開口52aを塞ぐように取り付けられている。振動板53はケース52とともに、圧力室52bを区画している。振動板53は、圧力室52bの内側および外側に弾性変形可能な部材である。振動板53は、圧力室52bの容積を増加および減少させるように変形可能に構成されている。振動板53は、典型的には樹脂フィルムである。
圧力室52bの側壁には、インクが流入するインク流入口52cが形成されている。ただし、インク流入口52cは圧力室52bとつながっていればよく、インク流入口52cの位置は何ら限定されない。圧力室52bには、インク流入口52cを通じてインクが供給される。
振動板53の圧力室52bと反対側の面には、アクチュエータ54が当接している。アクチュエータ54は、振動板53を介して、圧力室52bの体積を増減させるように駆動する。これにより、圧力室52bの体積が変化し、圧力室52bの体積の変化によってノズル51からインクが吐出される。アクチュエータ54は、例えば、圧電材料と導電層とが交互に積層された積層体の圧電素子である。アクチュエータ54は、制御装置100に電気的に接続され、制御装置100によって制御されている。アクチュエータ54は、制御装置100からの駆動信号を受けると膨張または収縮し、振動板53を圧力室52bの外側または内側に弾性変形させる。
図1に示すように、インクはインク供給システムSSによってインクヘッド50に供給される。図4は、インク供給システムSSの構成を示す模式図である。インク供給システムSSは、インクヘッド50にインクを供給するシステムである。ここでは、インク供給システムSSは、ノズル列ごとに設けられている。図4に示すように、インク供給システムSSは、インクカートリッジ60と、インク流路61と、送液ポンプ70と、ダンパ80とを備えている。
インクカートリッジ60は、インクが収容されたインク容器の一例である。インクカートリッジ60は、ここでは、密閉型に構成されている。収容されたインクの劣化等を抑制するためには、インクカートリッジ60は、密閉型に構成されていることが好ましい。1つのインクカートリッジ60には、例えば、プロセスカラーインクおよび特色インクのうちの1つのインクが貯留されている。インクの材料は何ら限定されず、従来からインクジェットプリンタのインクの材料として用いられている各種の材料を使用することができる。上記インクは、例えば、ソルベント系(溶剤系)顔料インクや水性顔料インクであってもよい。あるいは、水性染料インクや、紫外線を受けて硬化する紫外線硬化型顔料インク等であってもよい。インクカートリッジ60には、例えば、インクが収容された可撓性のパウチが内蔵されている。
インク流路61は、インクカートリッジ60とインクヘッド50とを接続している。インクは、インク流路61を通ってインクカートリッジ60からインクヘッド50に供給される。インク流路61の材質は限定されないが、例えば、可撓性のチューブによって構成されている。
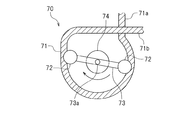
送液ポンプ70は、インク流路61に設けられている。送液ポンプ70は、駆動時にはインクカートリッジ60からインクヘッド50に向かう方向にインクを送るように構成されている。送液ポンプ70は、ここでは、チューブポンプである。ただし、送液ポンプ70の種類は限定されず、例えば、ダイヤフラムポンプなどであってもよい。送液ポンプ70は、制御装置100に電気的に接続され、制御装置100によって制御されている。図5は、送液ポンプ70の内部を模式的に示す断面図である。図5に示すように、送液ポンプ70は、内部流路71と、一対のローラ72と、アーム73と、モータ74とを備えている。
内部流路71は、可撓性のチューブで構成されている。内部流路71の上流側端部71aは、インク流路61のうち送液ポンプ70よりも上流側(インクカートリッジ60側)の部分に接続されている。内部流路71の下流側端部71bは、インク流路61のうち送液ポンプ70よりも下流側(インクヘッド50側)の部分に接続されている。内部流路71は、略円弧状に曲げられている。
送液ポンプ70は、一対のローラ72で内部流路71をしごくことによってインクを送出する。図5に示すように、一対のローラ72は、それぞれアーム73の両端に配置されている。アーム73は、回転軸73aを軸に回転可能に構成されている。アーム73が回転すると、一対のローラ72もアーム73の回転軸73aの周りを公転する。一対のローラ72は、この公転により内部流路71をしごく。それにより、インクが送出される。
モータ74は、アーム73に接続され、アーム73を回転させる。本実施形態では、モータ74は、ステッピングモータである。モータ74は、1つのパルスが入力されると、例えば、1600分の1回転するように構成されている。そこで、モータ74は、100のパルスが入力されると、16分の1回転する。本実施形態では、制御装置100は、アーム73の16分の1回転を、送液ポンプ70の1回の駆動とカウントしている。ただし、送液ポンプ70の構成は上記したものには限定されない。例えば、送液ポンプ70は、サーボモータを備えていてもよく、制御装置100は、サーボモータからの出力を受信することによって回転位置を把握してもよい。
図5から理解されるように、本実施形態では、送液ポンプ70の1回の駆動(ここでは、16分の1回転)当たりの送液量は、予め決まっている。送液ポンプ70が1回駆動されると、内部流路71のうちの16分の360度分に充填されているインクが送液ポンプ70の外部に押し出される。そこで、送液ポンプ70の1回の駆動当たりの送液量と駆動回数を乗じれば、インクの送液量を求めることができる。制御装置100は、送液ポンプ70の駆動の回数をカウントしており、それを制御に利用している。その制御については後述する。
ダンパ80は、インク流路61、より詳しくは、送液ポンプ70とインクヘッド50との間に設けられている。ダンパ80は、インクが一時的に貯留される貯留室を備え、インクの圧力変動を緩和している。また、ダンパ80には、貯留室内のインクの量を検出する検出装置が設けられ、制御装置100は、検出装置が検出する貯留室内のインクの量に基づいて送液ポンプ70の動作を制御している。
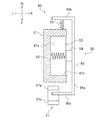
図6Aおよび図6Bは、ダンパ80の構成を模式的に示した断面図である。そのうち、図6Aは、ダンパ80の内部の圧力が所定の圧力よりも小さい状態を示している。図6Bは、ダンパ80の内部の圧力が所定の圧力以上の状態を示している。図6Aおよび図6Bに示すように、ダンパ80は、ダンパ本体81と、ダンパ膜82と、内部バネ83と、押圧部材84と、支持バネ85と、フィラー86と、センサ87とを備えている。
ダンパ本体81は中空に形成されている。貯留室81aは、ダンパ本体81の内部に構成されている。貯留室81aには、図示しない流入口と流出口とが形成されている。インクは、流入口を通って貯留室81aに流入し、流出口を通って貯留室81aから流出する。貯留室81aには、インクが一時的に貯留される。
ダンパ本体81には、開口81bが形成されている。ダンパ膜82は、開口81bを覆うように設けられている。貯留室81aは、ダンパ本体81とダンパ膜82とによって区画されている。ダンパ膜82は、例えば、可撓性を有する樹脂製のフィルムによって構成されている。ダンパ膜82は、貯留室81a内の圧力に反応して、貯留室81aの内側および外側に変形可能である。ダンパ膜82は、貯留室81aの内側および外側にそれぞれ撓むことができる程度の張力で取り付けられている。
図6Aおよび図6Bに示すように、貯留室81aの内部には、内部バネ83が設けられている。内部バネ83は、ダンパ膜82の貯留室81a側の面に接触している。内部バネ83は、圧縮された状態で貯留室81aに配置されている。内部バネ83は、ダンパ膜82に向かって弾性力を付与している。
押圧部材84は、ダンパ膜82の貯留室81aとは反対側の面に設けられている。押圧部材84は、内部バネ83に支持されており、ダンパ膜82の撓みとともに、貯留室81aの内側および外側に移動可能である。
フィラー86は、ダンパ本体81の外側に配置されている。フィラー86は、支持バネ85を介してダンパ本体81に支持されている。図6Aおよび図6Bに示すように、フィラー86は、略コの字状に形成されている。フィラー86は、接触部86aと、支持部86bと、被検出部86cとを有している。接触部86aは、伸長方向の中心付近で押圧部材84に対向している。支持部86bは、接触部86aの支持バネ85側の端部から、接触部86aに垂直に延びている。被検出部86cは、接触部86aのセンサ87側の端部から、接触部86aに垂直に延びている。接触部86aには、貯留室81a内部の圧力により押圧部材84が接触し、または離間する。支持部86bは、支持バネ85に支持されている。被検出部86cは、センサ87によって検出される部位である。
図6Aおよび図6Bに示すように、センサ87は、一対の検出部87aと87bとを有し、検出部87aと87bとの間にフィラー86の被検出部86cが位置しているかどうかを検出している。センサ87は、ここでは、非接触式のセンサである。図6Aに示すように、貯留室81aの圧力が所定の圧力を下回っているとき、フィラー86の被検出部86cは検出部87aと87bとの間に位置している。このとき、センサ87は、信号を発するように設定されている。図6Bに示すように、貯留室81aの圧力が大きくなるにしたがって、ダンパ膜82が貯留室81aの外側に撓む。このとき、押圧部材84によって、フィラー86が貯留室81aの外側に押される。それにより、フィラー86は、支持バネ85を軸に回転する。そして、貯留室81aの圧力が所定の圧力より大きくなったとき、フィラー86の被検出部86cは、検出部87aと87bとの間から外れた位置に移動する。このとき、センサ87は、信号を停止するように設定されている。センサ87は、制御装置100に接続されている。制御装置100は、センサ87からの信号を受信している。
ダンパ80のダンパ膜82、内部バネ83、押圧部材84、支持バネ85、フィラー86、およびセンサ87は、貯留室81a内のインクの量を検出する検出装置SDとして機能している。検出装置SDは、貯留室81a内のインクの量を検出するとともに、検出されたインクの量が所定の量を下回った場合には信号を送信するように構成されている。検出装置SDは、ここでは、貯留室81a内のインクの圧力が所定の圧力を下回っているかどうかを検出することによって、貯留室81a内のインクの量が所定の量を下回っているかどうかを検出する。
なお、本実施形態では、検出装置SDは、貯留室81a内のインクの量が所定の量を下回った場合に制御装置100に信号を送信するように設定されているが、検出装置SDの信号発信動作はこれと逆動作であってもよい。「検出装置SDは、貯留室81a内のインクの量が所定の量を下回った場合に信号を送信する」とは、貯留室81a内のインクの量が所定の量を上回っている状態と下回っている状態との間で信号発信動作が切り替わることを意味する。また、本実施形態では、検出装置SDは、貯留室81a内の圧力を検出することによって貯留室81a内のインクの量を検出しているが、例えば、インクの液面高さ等を検出してもよい。「検出装置SDがインクの量を検出する」とは、インクの量を直接に検出する場合も、本実施形態のように、圧力その他のインク量とは別の物理量を介してインクの量を検出する場合も含む。さらに、本実施形態では、検出装置SDは、貯留室81a内のインクの量が所定の量を上回っているか、下回っているかを検出するように構成されていたが、例えば、インク量を連続的に測定できてもよい。その場合、検出装置SDは、例えば、貯留室81a内のインクの圧力を連続的に測定できる圧力センサを備えていてもよい。
制御装置100は、センサ87から信号を受け取ると、送液ポンプ70を駆動させる。送液ポンプ70の駆動により貯留室81a内の圧力が所定の圧力以上になると、センサ87は、信号を停止する。制御装置100は、センサ87からの信号が途切れると、送液ポンプ70を停止させる。この制御により、消費されたインクに対応する量のインクがインクヘッド50に供給される。
図1に示すように、キャリッジ20の可動範囲の右端には、ホームポジションP1が設定されている。ホームポジションP1は、印刷待機時などにキャリッジ20が配置される位置である。ホームポジションP1におけるキャリッジ20の下方には、キャッピング装置90が配置されている。図1に示すように、キャッピング装置90は、キャップ91と、キャップ移動機構92と、吸引ポンプ93とを備えている。
キャップ91は、インクヘッド50に装着可能に構成されている。キャップ91は、インクヘッド50と同数設けられている。1つのインクヘッド50には1つのキャップ91が装着される。キャップ91は、上面が開口した容器状の形状を有している。キャップ91は、ゴム等によって形成されている。インクヘッド50への装着時、キャップ91の上縁がインクヘッド50のノズル面50aに密着される。
複数のキャップ91は、1つのキャップ移動機構92によって支持されている。キャップ移動機構92は、複数のキャップ91をインクヘッド50のノズル面50aに装着し、または離間させる。キャップ移動機構92は、キャップ91を下方から支持して上下方向に移動させる。それにより、キャップ91は、インクヘッド50に装着され、また離間される。キャップ移動機構92は、例えば、図示しない駆動モータを備えている。キャップ移動機構92は、制御装置100に電気的に接続され、制御装置100によって制御されている。なお、本実施形態では、キャップ移動機構92は、キャップ91を上下方向に移動させてインクヘッド50に装着したが、例えば、斜めにスライドさせて装着するように構成されていてもよい。
図1に示すように、吸引ポンプ93は、複数のキャップ91に接続されている。吸引ポンプ93は、キャップ91がインクヘッド50に装着された場合にインクヘッド50からインクを吸引する。吸引ポンプ93は、例えば、減圧ポンプである。吸引ポンプ93は、ノズル面50aに密着された状態のキャップ91の内部を減圧することによって、インクヘッド50からインクを吸引する。吸引ポンプ93は、制御装置100に電気的に接続され、制御装置100によって制御されている。
図1に示すように、ホームポジションP1の左方には、ワイピング装置95が設けられている。ワイピング装置95は、インクヘッド50のノズル面50aを拭うワイピング動作を行う。ワイピング装置95は、ワイパー96と、ワイパー移動機構97とを備えている。
ワイパー96は、平板状に構成されている。ワイパー96は、ここでは、平面部が前後方向を向くように設けられている。ワイパー96は、例えば、ゴムによって形成されている。ワイパー96の上端は、インクヘッド50のノズル面50aよりもわずかに高い位置に設定されている。そこで、インクヘッド50がワイパー96の移動経路に位置している状態で、ワイパー移動機構97がワイパー96を移動させると、ワイパー96は、インクヘッド50のノズル面50aを払拭する。
ワイパー移動機構97は、ワイパー96を前後方向に移動させるように構成されている。ワイパー移動機構97は、例えば、図示しない駆動モータとベルトとを備えている。ワイパー移動機構97は、制御装置100に電気的に接続され、制御装置100によって制御されている。
図1に示すように、プリンタ10の右端部には、操作パネル200が設けられている。操作パネル200には、機器状態を表示する表示部と、ユーザーによって操作される入力キー等が設けられている。
操作パネル200は、制御装置100と接続されている。図7は、本実施形態に係るプリンタ10のブロック図である。図7に示すように、制御装置100は、キャリッジモータ34と、フィードモータ43と、インクヘッド50のアクチュエータ54と、送液ポンプ70のモータ74と、キャップ移動機構92と、吸引ポンプ93と、ワイパー移動機構97と、操作パネル200とにそれぞれ電気的に接続されており、それらを制御可能に構成されている。また、制御装置100は、検出装置SDのセンサ87に電気的に接続され、検出装置SDのセンサ87からの信号を受信している。
制御装置100の構成は特に限定されない。制御装置100は、例えばマイクロコンピュータである。マイクロコンピュータのハードウェア構成は特に限定されないが、例えば、ホストコンピュータ等の外部機器から印刷データ等を受信するインターフェイス(I/F)と、制御プログラムの命令を実行する中央演算処理装置(CPU:central processing unit)と、CPUが実行するプログラムを格納したROM(read only memory)と、プログラムを展開するワーキングエリアとして使用されるRAM(random access memory)と、上記プログラムや各種データを格納するメモリ等の記憶装置とを備えている。なお、制御装置100は必ずしもプリンタ10の内部に設けられている必要はなく、例えば、プリンタ10の外部に設置され、有線または無線を介してプリンタ10と通信可能に接続されたコンピュータ等であってもよい。
図7に示すように、制御装置100は、印刷制御部110と、排出制御部120と、インク供給部130と、エンプティ検出部140と、送液停止部150と、リセット部160とを備えている。制御装置100は、その他の処理部を備えていてもよいが、ここでは図示および説明を省略する。
印刷制御部110は、プリンタ10の印刷動作を制御する。図7に示すように、印刷制御部110は、吐出制御部111と、キャリッジ移動制御部112と、媒体移動制御部113とを備えている。吐出制御部111は、印刷においてインクヘッド50を駆動させ、インクを吐出させるように設定されている。キャリッジ移動制御部112は、印刷においてキャリッジモータ34を駆動させ、キャリッジ20を左右方向に移動させる。媒体移動制御部113は、印刷においてフィードモータ43を駆動させ、記録媒体5を前後方向に移動させる。印刷制御部110は、キャリッジ20を左右方向に移動させながらインクヘッド50からインクを吐出させることにより、記録媒体5の一部に画像を印刷する。印刷制御部110は、さらに、記録媒体5を前後方向に移動させることによって記録媒体5上の印刷位置を移動させる。これらの動作により、記録媒体5上に画像が印刷される。
排出制御部120は、印刷以外のインク排出動作を制御する。排出制御部120は、第1排出制御部121と、第2排出制御部122とを備えている。第1排出制御部121、第2排出制御部122は、いずれも、印刷以外においてインクヘッド50からインクを排出させるように設定されている。そのうち、第1排出制御部121は、キャッピング装置90によるインク吸引動作を制御する。第1排出制御部121は、キャップ移動機構92と吸引ポンプ93とを制御してインクヘッド50からインクを吸引する。第1排出制御部121は、それによって、インクヘッド50からインクを排出させる。第2排出制御部122は、印刷以外においてインクヘッド50を駆動させてインクヘッド50からインクを排出させる、いわゆるフラッシング動作を制御する。フラッシングは、キャップ91に向かってインクを吐出する動作である。フラッシングは、例えば、ワイピングの後にインクが混色することを防止するためなどに行われる。
インク供給部130は、インクヘッド50へのインクの供給を制御している。インク供給部130は、受信部131と、供給制御部132とを備えている。受信部131は、検出装置SDからの信号を受信するように構成されている。受信部131は、ダンパ80の貯留室81a内のインクの圧力が所定値を下回ったときに信号を受信する。供給制御部132は、受信部131がセンサ87からの信号を受信した場合に、送液ポンプ70を駆動させる。供給制御部132は、センサ87からの信号が途切れた場合には、送液ポンプ70を停止させる。これにより、インク供給部130は、インクヘッド50で消費された量に対応する量のインクをインクヘッド50に供給している。なお、本実施形態では、供給制御部132は、送液ポンプ70を駆動させるとき、1回転の16分の1ずつ間欠的に駆動させる。この制御の詳細については後述する。
エンプティ検出部140は、インクカートリッジ60内のインク残量が不足していないかどうかを判定している。エンプティ検出部140は、第1記憶部141と、第1判定部142と、第2記憶部143と、第2判定部144と、第3記憶部145と、第3判定部146と、第4記憶部147と、第4判定部148と、送液量演算部149とを備えている。
第1記憶部141は、吐出制御部111がインクを吐出させたことにより供給制御部132が送液ポンプ70を駆動させた場合の送液ポンプ70の送液量の閾値(以下、第1閾値)を記憶している。第1閾値は、印刷時において、インクカートリッジ60内のインクの残量が不足かどうかを判定するための閾値である。第1判定部142は、吐出制御部111がインクを吐出させたことにより送液ポンプ70が駆動された場合であって、送液ポンプ70の送液量が第1閾値に到達しても受信部131が検出装置SDからの信号を受信している場合に、インクカートリッジ60内のインクの残量が不足していると判定する。この制御の詳細については後述する。
第2記憶部143は、第1排出制御部121がインクを排出させたことにより供給制御部132が送液ポンプ70を駆動させた場合の送液ポンプ70の送液量の閾値(以下、第2閾値)を記憶している。第2閾値は、インク吸引時において、インクカートリッジ60内のインクの残量が不足かどうかを判定するための閾値である。第2判定部144は、第1排出制御部121がインクを排出させたことにより送液ポンプ70が駆動された場合であって、送液ポンプ70の送液量が第2閾値に到達しても受信部131が検出装置SDからの信号を受信している場合に、インクカートリッジ60内のインクの残量が不足していると判定する。この制御の詳細についても後述する。
第3記憶部145は、第2排出制御部122がインクを排出させたことにより供給制御部132が送液ポンプ70を駆動させた場合の送液ポンプ70の送液量の閾値(以下、第3閾値)を記憶している。第3閾値は、フラッシング時において、インクカートリッジ60内のインクの残量が不足かどうかを判定するための閾値である。第3判定部146は、第2排出制御部122がインクを排出させたことにより送液ポンプ70が駆動された場合であって、送液ポンプ70の送液量が第3閾値に到達しても受信部131が検出装置SDからの信号を受信している場合に、インクカートリッジ60内のインクの残量が不足していると判定する。この制御の詳細についても後述する。
第4記憶部147および第4判定部148は、インクカートリッジ60が交換された後の復帰動作に異常がないかどうかを判定している。第4記憶部147は、インクカートリッジ60交換後のリセット操作により送液ポンプ70が駆動された場合の送液ポンプ70の送液量の閾値(以下、第4閾値)を記憶している。第4判定部148は、リセット操作により送液ポンプ70が駆動された場合であって、送液ポンプ70の送液量が第4閾値に到達しても受信部131が検出装置SDからの信号を受信している場合に、異常と判定する。この制御の詳細についても後述する。
送液量演算部149は、送液ポンプ70の送液量を演算している。本実施形態では、送液ポンプ70はチューブポンプであり、1回の駆動(ここでは、16分の1回転)当たりの送液量が予め決まっている。そこで、送液量演算部149は、供給制御部132が送液ポンプ70を駆動させた回数をカウントし、その回数に基づいて送液ポンプ70の送液量を演算している。第1判定部142、第2判定部144、第3判定部146、および第4判定部148は、送液量演算部149が演算した送液ポンプ70の送液量に基づいて、インクカートリッジ60のインク残量を判定している。
送液停止部150は、第1判定部142、第2判定部144、または第3判定部146によってインクカートリッジ60のインク残量が不足していると判定された後に送液ポンプ70を停止するように設定されている。また、リセット部160は、送液停止部150が送液ポンプ70を停止させた後にリセット操作を受け付ける。リセット部160は、例えば、操作パネル200や外部ディスプレイなどにリセット画面を表示させ、ユーザーによるリセット操作を受け付ける。これらの制御についても後述する。
なお、上記において第1閾値〜第4閾値は、送液ポンプ70の送液量として説明したが、これと等価な物理量であれば、他の量でもよい。つまり、例えば、第1閾値〜第4閾値は、送液ポンプ70の駆動回数でもよい。または、例えば、送液ポンプ70の送液時間や、ローラ72の公転角度でもよい。送液量演算部149が演算する送液量も同様であり、例えば、送液ポンプ70の駆動回数や送液時間やローラ72の公転角度によって置換されてもよい。ここでの「送液ポンプ70の送液量」は、送液ポンプ70の送液量(体積または重さ)と等価計算可能な他の物理量を含む。
以下では、印刷時、インク吸引時、およびフラッシング時にインクカートリッジ60内のインク残量が不足状態となった場合のプリンタ10の動作について、それぞれ説明する。その後、インクカートリッジ60交換後の復帰動作について説明する。なお、下記の説明では、第1閾値〜第4閾値は、送液ポンプ70の駆動回数として設定されているとする。本実施形態では、送液ポンプ70は、容積式のポンプであり、1回の駆動当たりの送液量が予め決まっている。また、供給制御部132は、送液ポンプ70を間欠的に駆動させる。そこで、供給制御部132が送液ポンプ70を駆動させた回数に基づいて送液ポンプ70の送液量が求まる。よって、送液ポンプ70の送液量の演算が容易である。ここでは、制御装置100は、送液ポンプ70の駆動回数そのものをインク残量が足りているかどうかの判定に利用している。
また、下記の説明では、第1閾値は「3回」(送液ポンプ70の「16分の3回転」相当)、第2閾値は「5回」(送液ポンプ70の「16分の5回転」相当)、第3閾値は「4回」(送液ポンプ70の「16分の4回転」相当)、第4閾値は「10回」(送液ポンプ70の「16分の10回転」相当)に設定されているものとする。ただし、これらは単なる例示であり、第1閾値〜第4閾値を何ら限定するものではない。
詳しくは後述するが、第1閾値〜第4閾値は、それぞれ、印刷時における時間当たりのインク消費量(以下、消費速度と言う)、インク吸引時におけるインクの消費速度、フラッシング時におけるインクの消費速度、インクカートリッジ60交換後の復帰時における時間当たりのインク補充量(補充速度)に基づいて定められている。一般に、インク吸引によるインクの消費速度は、印刷時の吐出によるインクの消費速度よりも大きい。本実施形態でも、インク吸引によるインクの消費速度は、印刷時の吐出によるインクの消費速度よりも大きい。また、フラッシングによるインクの消費速度は、印刷時の吐出によるインクの消費速度よりも大きく、インク吸引によるインクの消費速度よりも小さい。
まず、印刷時にインクカートリッジ60内のインク残量が不足状態となった場合のプリンタ10の動作について説明する。図8は、印刷時におけるインクカートリッジ60内のインク残量検知の流れを示すフローチャートである。図8に示すように、ステップS101では、制御装置100は、センサ87からの信号を受信する。印刷においては、インクヘッド50からインクが吐出されており、インクの吐出により貯留室81a内のインクが減少する。よって、センサ87は、印刷中のどこかの時点で信号を送信する。続くステップS102では、送液ポンプ70が1回駆動される。これにより、送液ポンプ70の16分の1回転分のインクが貯留室81aに補充される。本実施形態に係るプリンタ10は、送液ポンプ70を、1回につき16分の1回転ずつ間欠的に駆動させるように設定されている。
続くステップS103では、センサ87からの信号が継続しているかどうかが判断される。制御装置100がセンサ87からの信号を引き続き受信している場合(「YES」の場合)、ステップはステップS104に進む。制御装置100がセンサ87からの信号を受信していない場合(「NO」の場合)、ステップはステップS110に進む。ステップS110では、送液ポンプ70によるインクの供給は正常に完了したものと判定される。この場合、ステップはステップS111に進む。ステップS111では、送液ポンプ70が停止される。この送液ポンプ70の停止は、正常終了である。
ステップS103の結果が「YES」によりステップS104に進んだ場合、ステップS104では、送液ポンプ70がもう1回駆動される。これにより、送液ポンプ70の16分の1回転分のインクが貯留室81aにさらに補充される。
続くステップS105では、ステップS103と同様に、センサ87からの信号が継続しているかどうかが判断される。制御装置100がセンサ87からの信号を引き続き受信している場合(「YES」の場合)、ステップはステップS106に進む。制御装置100がセンサ87からの信号を受信していない場合(「NO」の場合)、ステップはステップS110およびステップS111に進む(正常終了)。
ステップS105の結果が「YES」によりステップS106に進んだ場合、ステップS106では、送液ポンプ70がさらにもう1回駆動される。これにより、送液ポンプ70の16分の1回転分のインクが貯留室81aにさらに補充される。
続くステップS107では、ステップS103およびステップS105と同様に、センサ87からの信号が継続しているかどうかが判断される。制御装置100がセンサ87からの信号を引き続き受信している場合(「YES」の場合)、ステップはステップS108に進む。制御装置100がセンサ87からの信号を受信していない場合(「NO」の場合)、ステップはステップS110およびステップS111に進む(正常終了)。
ステップS107の結果が「YES」によりステップS108に進んだ場合、制御装置100は、ステップS108において、インクカートリッジ60内のインクの残量が不足していると判定する。ステップS106までのプロセスにおいて、送液ポンプ70は「3回」駆動されている。印刷時の送液ポンプ70の駆動回数の閾値である第1閾値は、「3回」である。よって、ステップS106において、送液ポンプ70の駆動回数は、第1閾値に到達している。それでもなお、ステップS107においてセンサ87からの信号が途切れた(貯留室81a内の圧力が復帰した)ことが確認できないため、ステップS108において、プリンタ10は、インクカートリッジ60内のインクの残量が不足であると判定している。ステップS108の後、ステップはステップS109に進み、送液ポンプ70が停止される。この送液ポンプ70の停止は、異常終了である。なお、図示は省略するが、ステップS109の後には、例えば、ユーザーにインクカートリッジ60の交換を促す画面を操作パネル200等に表示させるステップがあるとよい。
次に、インク吸引中にインクカートリッジ60内のインク残量が不足状態となった場合のプリンタ10の動作について説明する。図9は、インク吸引時におけるインクカートリッジ60内のインク残量検知の流れを示すフローチャートである。図9に示すフローは、送液ポンプ70の駆動回数に係る閾値が第2閾値(ここでは、5回)であることを除いて、図8のフローチャートと同様である。よって、簡略に説明する。
図9に示すように、ステップS201では、制御装置100は、センサ87からの信号を受信する。続くステップS202では、送液ポンプ70が1回駆動され、この送液ポンプ70の駆動によりセンサ87からの信号が途切れたかどうかが、ステップS203において判断される。ステップS203の結果が「NO」の場合には、ステップはステップS214に進み、送液ポンプ70によるインクの供給は正常に完了したものと判定される。その後のステップS215では、送液ポンプ70が停止される。この送液ポンプ70の停止は、正常終了である。
ステップS203の結果が「YES」の場合には、ステップはステップS204に進む。以下、ステップS202およびS203と同様に、送液ポンプ70の駆動とセンサ87からの信号の確認とが、あと最大4回繰り返される。具体的には、ステップS204およびS205において2回目の送液ポンプ70の駆動およびセンサ87からの信号の確認が行われ、結果がNOであれば、ステップS214に進む。結果がYESであれば、ステップS206に進む。同様に、ステップS206およびS207においては3回目の送液ポンプ70の駆動およびセンサ87からの信号の確認が行われ、結果がNOであれば、ステップS214に進む。結果がYESであれば、ステップS208に進む。ステップS208およびS209においては4回目の送液ポンプ70の駆動およびセンサ87からの信号の確認が行われ、結果がNOであれば、ステップS214に進む。結果がYESであれば、ステップS210に進む。ステップS210およびS211においては5回目の送液ポンプ70の駆動およびセンサ87からの信号の確認が行われ、結果がNOであれば、ステップS214に進む。結果がYESであれば、ステップS212に進む。
ステップS211の結果が「YES」によりステップS212に進んだ場合、制御装置100は、ステップS212において、インクカートリッジ60内のインクの残量が不足していると判定する。ステップS210において、送液ポンプ70の駆動回数は、第2閾値(5回)に到達している。それでもなお、ステップS211においてセンサ87からの信号が途切れた(貯留室81a内の圧力が復帰した)ことが確認できないため、ステップS212において、プリンタ10は、インクカートリッジ60内のインクの残量が不足であると判定している。ステップS212の後、ステップはステップS213に進み、送液ポンプ70が停止される。この送液ポンプ70の停止は、異常終了である。
上記のように、本実施形態に係るプリンタ10では、インクカートリッジ60内のインク残量が不足かどうかを判定するための閾値が、印刷時とインク吸引時とで異なる値に設定されている。インクカートリッジ60内のインク残量が不足かどうかを判定するための閾値は、基本的には、インクの消費速度が大きいほど大きく設定される。これは、インクの消費速度に対して閾値を小さく設定し過ぎると、インク残量が不足していないにもかかわらず不足していると判定する誤判定が起こりやすくなるためである。一方、インクの消費速度に対して閾値を大きく設定し過ぎると、インクの残量不足の検知が遅れ、インクの供給がないまま消費だけが長時間行われる。それにより、例えば、インク流路内が負圧になり、インクのメニスカスを破壊する等の不具合が発生するおそれがある。従って、本実施形態では、インク残量が不足かどうかを判定するための閾値は、インクの消費速度に合わせて設定されている。より具体的には、閾値は、誤判定が起きにくく、かつ、不要に長時間インク消費がされない値に設定されている。ここでは、印刷時よりもインク吸引時の方がインクの消費速度が大きいため、第1閾値(3回)よりも第2閾値(5回)が大きく設定されている。第1閾値は、印刷時のインクの消費速度に対して好適な閾値である。第2閾値は、インク吸引時のインクの消費速度に対して好適な閾値である。
それに対し、従来のインクジェットプリンタでは、インクが消費されるパターン(例えば、印刷、インク吸引、フラッシング等)にかかわらず、1つの閾値しか設定することができなかった。そのため、全てのインク消費のパターンにおいて好適なように閾値を設定することは容易ではなかった。その結果、インクカートリッジ内のインク残量に関して誤判定がなされたり、または、インクの残量不足の検知が遅れたりすることがあった。そして、インクの残量不足の検知が遅れることによってインク流路内が負圧になり、インクのメニスカスを破壊する等の不具合が発生するおそれがあった。
本実施形態に係るプリンタ10は、上記したような従来のインクジェットプリンタの課題に鑑みて構成されている。本実施形態に係るプリンタ10は、印刷およびインク吸引にそれぞれ対応した第1閾値および第2閾値を記憶する第1記憶部141および第2記憶部143を備えている。また、本実施形態に係るプリンタ10は、印刷時およびインク吸引時において、それぞれ第1閾値および第2閾値を閾値としてインクの残量が不足かどうかを判定する第1判定部142および第2判定部144を備えている。かかる構成によれば、インクカートリッジ60内のインク残量が不足かどうかを判定する閾値として、インク消費のパターンが印刷である場合に対応した第1閾値と、インク消費のパターンがインク吸引である場合に対応した第2閾値とをそれぞれ設定できる。そこで、印刷およびインク吸引に対して、それぞれ好適な閾値を設定することができる。
本実施形態では、第2閾値は、第1閾値よりも大きく設定されている。インクジェットプリンタにおいては、通常、インク吸引によるインクの消費速度の方が印刷によるインクの消費速度よりも大きい。そのため、かかる構成によれば、適切にインクカートリッジ60内のインクの残量不足を検知することができる。
フラッシングに係る第3閾値についても同様である。図10は、フラッシング時におけるインクカートリッジ60内のインク残量検知の流れを示すフローチャートである。図10に示すフローは、送液ポンプ70の駆動回数に係る閾値が第3閾値(ここでは、4回)であることを除いて、図8または図9のフローチャートと同様である。図10に示すように、ステップS301では、制御装置100は、センサ87からの信号を受信する。続くステップS302では、送液ポンプ70が1回駆動され、この送液ポンプ70の駆動によってセンサ87からの信号が途切れたかどうかが、ステップS303において判断される。ステップS303の結果が「NO」の場合には、ステップはステップS312に進み、送液ポンプ70によるインクの供給は正常に完了したものと判定される。その後のステップS313では、送液ポンプ70が停止される。この送液ポンプ70の停止は、正常終了である。
ステップS303の結果が「YES」の場合には、ステップはステップS304に進む。以下、ステップS302およびS303と同様に、送液ポンプ70の駆動とセンサ87からの信号の確認とが、あと最大3回繰り返される。具体的には、ステップS304およびS305において2回目の送液ポンプ70の駆動およびセンサ87からの信号の確認が行われ、結果がNOであれば、ステップS312に進む。結果がYESであれば、ステップS306に進む。同様に、ステップS306およびS307においては3回目の送液ポンプ70の駆動およびセンサ87からの信号の確認が行われ、結果がNOであれば、ステップS312に進む。結果がYESであれば、ステップS308に進む。ステップS308およびS309においては4回目の送液ポンプ70の駆動およびセンサ87からの信号の確認が行われ、結果がNOであれば、ステップS312に進む。結果がYESであれば、ステップS310に進む。ステップS310では、制御装置100は、インクカートリッジ60内のインクの残量が不足していると判定する。ステップS310の後、ステップはステップS311に進み、送液ポンプ70が停止される。この送液ポンプ70の停止は、異常終了である。
このように、本実施形態に係るプリンタ10は、フラッシングに対応した第3閾値を記憶する第3記憶部145をさらに備えている。また、本実施形態に係るプリンタ10は、フラッシング時において、第3閾値を閾値としてインクの残量が不足かどうかを判定する第3判定部146をさらに備えている。かかる構成によれば、インクカートリッジ60内のインク残量が不足かどうかを判定する閾値として、インク消費のパターンがフラッシングである場合に対応した第3閾値をさらに設定でき、フラッシングに対して好適な閾値を設定することができる。
本実施形態では、第3閾値は、第1閾値よりも大きく、かつ、第2閾値よりも小さく設定されている。インクジェットプリンタにおいては、通常、フラッシングによるインク消費速度は、印刷によるインク消費速度よりも大きく、インク吸引によるインク消費速度よりも小さい。そのため、かかる構成によれば、適切にインクカートリッジ60内のインクの残量不足を検知することができる。
本実施形態では、印刷時、インク吸引時、またはフラッシング時のいずれかにおいて、インクカートリッジ60内のインク残量が不足と判定された場合、プリンタ10は、送液ポンプ70を停止する。また、プリンタ10は、操作パネル200等にリセット画面を表示する。ユーザーは、インクカートリッジ60を交換し、その後、リセット画面でリセット操作を行う。リセット操作により復帰動作が開始される。復帰動作においては、少なくともダンパ80へのインクの補充が行われる。インクカートリッジ60内のインク残量が不足であると判定された時点では、センサ87は信号を発したままであり、復帰動作ではセンサ87の信号に基づいて送液ポンプ70が駆動される。復帰動作においても、送液ポンプ70は、1回につき16分の1回転ずつ間欠的に駆動する。この復帰動作に関しても、送液ポンプ70の駆動回数に係る第4閾値が設定されている。
復帰動作における各部の動作は図8〜図10に示したプロセスとほぼ同じであるため図示は省略するが、第4閾値は「10回」に設定されている。よって、復帰動作では、最大10回、送液ポンプ70の駆動およびセンサ87からの信号の確認が行われる。復帰動作におけるインク送りでは、インク流路61にインクが充填されていない場合があり、そのために送液ポンプ70が駆動しても当初は空送りになる場合がある。そのため、第4閾値は、比較的大きく設定されている。
復帰動作において、送液ポンプ70の駆動回数が第4閾値に到達してもなおセンサ87の信号がOFFしない場合、プリンタ10は、異常と判定する。異常の原因としては、大別して2つのケースが考えられる。1つは、インクカートリッジ60の装着ミスや、インクカートリッジ60との接続部、送液ポンプ70等の異常によりインクが送れない場合である。もう1つは、検出装置SDの異常により、インクが送れているにもかかわらず、センサ87の信号がOFFにならない場合である。いずれにしても、送液ポンプ70の駆動回数が第4閾値に到達してもなおセンサ87の信号がOFFしない場合はプリンタ10の異常である。よって、送液ポンプ70は、停止される。なお、インクが送れているにもかかわらず、検出装置SDの異常によりセンサ87の信号がOFFにならない場合に備え、第4閾値は、ダンパ80の貯留室81aの最大貯留量よりも小さく設定されている。
かかるプリンタ10によれば、インク供給システムSSが異常かどうかを判定する閾値として第4閾値を設定でき、インク供給システムSSの異常を適切に検出することができる。逆に言うと、第4閾値を独立に設定できない場合には、インク供給システムSSに異常がないにもかかわらず異常と判定される誤判定が多くなるおそれがある。
以上、好適な一実施形態について説明した。しかし、上記の実施形態は例示に過ぎず、ここに開示する技術は他の種々の形態で実施することができる。例えば、上記実施形態では、送液ポンプの送液量に係る複数の閾値は、印刷、インク吸引、フラッシング、および復帰動作に対応して設定されていた。しかし、これは1つの好適な例示に過ぎず、複数の閾値は、他のインク消費パターンに対応していてもよい。また、複数の閾値は、例えば、印刷およびインク吸引に対応するように設定され、フラッシングに対応するように設定されなくてもよい。あるいは、複数の閾値は、印刷およびフラッシングに対応するように設定され、インク吸引に対応するように設定されなくてもよい。複数の閾値の数、および対応するインク消費のパターンは、特に限定されない。
また、インク供給システムの構成は、上記したものに限定されない。インク供給システムには、適宜他の部材、例えば、バルブや循環流路などが追加されてもよく、一部の部材が削除されてもよい。
本実施形態では、送液ポンプはチューブポンプであったが、チューブポンプには限定されない。送液ポンプは、例えば、ダイヤフラムポンプやシリンジポンプ等であってもよい。送液ポンプの種類は、特に限定されない。
その他、インクジェットプリンタの構成については、特に言及がない限りにおいて限定されない。例えば、ここに開示する技術は、フラットベッドタイプのインクジェットプリンタなどに対しても利用できる。また、例えば、カッティングヘッド付きインクジェットプリンタなどのように、その一部にインクジェットプリンタが組み込まれた装置にも利用できる。