JP2020179979A - エレベータ用おもり枠、エレベータ用装置、およびダンパの復帰点検方法 - Google Patents
エレベータ用おもり枠、エレベータ用装置、およびダンパの復帰点検方法 Download PDFInfo
- Publication number
- JP2020179979A JP2020179979A JP2019084507A JP2019084507A JP2020179979A JP 2020179979 A JP2020179979 A JP 2020179979A JP 2019084507 A JP2019084507 A JP 2019084507A JP 2019084507 A JP2019084507 A JP 2019084507A JP 2020179979 A JP2020179979 A JP 2020179979A
- Authority
- JP
- Japan
- Prior art keywords
- striker
- frame
- damper
- frame body
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Cage And Drive Apparatuses For Elevators (AREA)
Abstract
Description
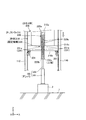
図1,3は、ダンパ100およびおもり枠200を示す正面図であり、図2,4は、ダンパ100およびおもり枠200を示す側面図であり、図1,2は、ストライカ220の収納状態を示し、図3,4は、ストライカ220の突出状態を示している。
図7は、本実施形態のおもり枠200A、すなわち枠体210およびストライカ220Aの、部分的な正面図である。図7に示されるように、本実施形態では、枠体210に、ラチェット機構240が設けられている。ラチェット機構240は、ストライカ220Aに設けられた鋸歯241と、枠体210に設けられた可動爪242と、可動爪242を鋸歯241に付勢するコイルスプリング243と、を有している。なお、本実施形態のおもり枠200Aは、上記第1実施形態と同様の固定機構230を備えている。
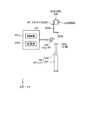
図8は、ダンパ100およびおもり枠200を示す側面図である。図8に示されるように、本実施形態では、作業が終了したにも拘わらず作業員がストライカ220を収納し忘れた場合に、当該突出位置P1にあるストライカ220、言い換えると突出状態にあるストライカ220を検知するセンサ250が設けられている。センサ250は、一例としては、ストライカ220との接触を検出するリミットスイッチ(スイッチ)である。この場合、センサ250は、通常運転状態における枠体210とダンパ100のピストン102の上端102aとの間の隙間において、突出位置P1にあるストライカ220の底壁220bの軌道上に設けられる。このような構成にあっては、通常運転状態における、かごの最上位置への上昇、すなわち枠体210の最下位置への下降に伴って、ストライカ220の底壁220bがセンサ250としてのリミットスイッチを切るため、これにより、ストライカ220が突出状態にあることを検出することができる。また、点検運転状態にあっては、センサ250の検出信号は無視されるため、センサ250による検出は、上述したダンパ100の復帰点検に拘わる一連の作業には影響を及ぼさない。なお、センサ250は、リミットスイッチには限定されず、ストライカ220の突出状態を検知できるセンサであればよい。一例として、センサ250は、非接触センサであってもよい。
Claims (6)
- 枠体と、
当該枠体よりも下方への突出状態と収納状態とを変更可能に前記枠体に取り付けられ、前記突出状態において前記枠体の下降に伴いダンパの上端に当接するストライカと、
を備えた、エレベータ用おもり枠。 - 前記ストライカは、前記枠体に対して相対的に上下方向に移動可能であり、
前記ストライカの下方への突出長さを変更可能に前記枠体に固定する固定機構、を備えた、請求項1に記載のエレベータ用おもり枠。 - 前記枠体に設けられ、前記固定機構によって前記ストライカが前記枠体に固定されていない状態で前記ストライカを支持することにより前記ストライカが前記枠体に対して相対的に下方へ移動するのを抑制する仮支持部材、を備えた、請求項2に記載のエレベータ用おもり枠。
- 前記枠体および前記ストライカのうち一方に設けられ上下方向に並ぶ複数の鋸歯と、前記複数の鋸歯のうちいずれかと噛み合う噛合位置と噛み合いを解除する解除位置との間で移動可能に前記枠体および前記ストライカのうち他方に設けられ前記噛合位置における前記鋸歯との噛み合いにより前記ストライカの前記枠体に対する下方への相対的な移動を抑制する可動爪と、前記他方に設けられ前記可動爪を前記解除位置から前記噛合位置に向けて付勢する付勢部材と、前記複数の鋸歯のそれぞれに設けられ前記ストライカが前記枠体に対して相対的に上方へ移動する際に前記付勢部材による付勢力に抗って前記可動爪を前記噛合位置から前記解除位置へ押圧することにより前記ストライカの前記枠体に対する相対的な上方への移動を許容する押圧面と、を有したラチェット機構、を備えた、請求項2または3に記載のエレベータ用おもり枠。
- 前記ストライカの突出状態を検知するセンサを備えた、請求項1〜4のうちいずれか一つに記載のエレベータ用おもり枠。
- 枠体と、当該枠体よりも下方への突出状態と収納状態とを変更可能に前記枠体に取り付けられ、前記突出状態において前記枠体の下降に伴いダンパの上端に当接するストライカと、を備えた、エレベータ用おもり枠を用いたダンパの復帰点検方法であって、
前記ストライカを前記収納状態から前記突出状態に変更する第一ステップと、
前記ストライカが前記ダンパの上端を押圧するよう前記突出状態で前記枠体を下降させる第二ステップと、
当該第二ステップの後、前記ストライカが前記ダンパの上端から離間するよう前記枠体を上昇させる第三ステップと、
当該第三ステップの後、前記ダンパの前記ストライカによる押圧状態からの復帰を検査する第四ステップと、
当該第四ステップの後、前記ストライカを前記突出状態から前記収納状態に戻す第五ステップと、
を備えた、ダンパの復帰点検方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019084507A JP6734434B1 (ja) | 2019-04-25 | 2019-04-25 | エレベータ用おもり枠、エレベータ用装置、およびダンパの復帰点検方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019084507A JP6734434B1 (ja) | 2019-04-25 | 2019-04-25 | エレベータ用おもり枠、エレベータ用装置、およびダンパの復帰点検方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6734434B1 JP6734434B1 (ja) | 2020-08-05 |
| JP2020179979A true JP2020179979A (ja) | 2020-11-05 |
Family
ID=71892293
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019084507A Expired - Fee Related JP6734434B1 (ja) | 2019-04-25 | 2019-04-25 | エレベータ用おもり枠、エレベータ用装置、およびダンパの復帰点検方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6734434B1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024116231A1 (ja) * | 2022-11-28 | 2024-06-06 | 株式会社日立製作所 | つり合いおもり及びエレベーター |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118651743A (zh) * | 2024-08-21 | 2024-09-17 | 东北大学 | 一种基于计算机视觉的电梯钢丝绳伸长量检测方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55105572U (ja) * | 1979-01-19 | 1980-07-23 | ||
| JPS58154277U (ja) * | 1982-04-12 | 1983-10-15 | 株式会社日立製作所 | エレベ−タ−のカウンタウエイト用緩衝装置 |
| JPH05278964A (ja) * | 1992-04-01 | 1993-10-26 | Hitachi Building Syst Eng & Service Co Ltd | エレベータの主ロープ伸び検出装置 |
| JPH07330253A (ja) * | 1994-06-06 | 1995-12-19 | Mitsubishi Denki Bill Techno Service Kk | エレベータつり合いおもり |
| JPH09194155A (ja) * | 1996-01-16 | 1997-07-29 | Hitachi Building Syst Co Ltd | エレベータ用油入緩衝器の試験装置 |
| JP2004217389A (ja) * | 2003-01-16 | 2004-08-05 | Mitsubishi Electric Corp | エレベータの釣合おもり用スペーサ装置 |
-
2019
- 2019-04-25 JP JP2019084507A patent/JP6734434B1/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55105572U (ja) * | 1979-01-19 | 1980-07-23 | ||
| JPS58154277U (ja) * | 1982-04-12 | 1983-10-15 | 株式会社日立製作所 | エレベ−タ−のカウンタウエイト用緩衝装置 |
| JPH05278964A (ja) * | 1992-04-01 | 1993-10-26 | Hitachi Building Syst Eng & Service Co Ltd | エレベータの主ロープ伸び検出装置 |
| JPH07330253A (ja) * | 1994-06-06 | 1995-12-19 | Mitsubishi Denki Bill Techno Service Kk | エレベータつり合いおもり |
| JPH09194155A (ja) * | 1996-01-16 | 1997-07-29 | Hitachi Building Syst Co Ltd | エレベータ用油入緩衝器の試験装置 |
| JP2004217389A (ja) * | 2003-01-16 | 2004-08-05 | Mitsubishi Electric Corp | エレベータの釣合おもり用スペーサ装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024116231A1 (ja) * | 2022-11-28 | 2024-06-06 | 株式会社日立製作所 | つり合いおもり及びエレベーター |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6734434B1 (ja) | 2020-08-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1739046B1 (en) | Emergency stop system of elevator | |
| JP4107728B2 (ja) | エレベータ装置 | |
| KR100611596B1 (ko) | 엘리베이터의 제동장치 | |
| JP2020179979A (ja) | エレベータ用おもり枠、エレベータ用装置、およびダンパの復帰点検方法 | |
| JP2010037060A (ja) | エレベータシステム | |
| CN101428722A (zh) | 电梯的紧急停止系统 | |
| JP2011178496A (ja) | エレベータの制御装置 | |
| JP2009007098A (ja) | エレベータのガバナロープ状態検出装置およびエレベータの制御システム | |
| JP5548524B2 (ja) | 非常止め装置を備えた昇降装置 | |
| JP2017159990A (ja) | エレベータのロープ異常検出装置 | |
| CN104692206B (zh) | 电梯的维修检查用制动器控制装置 | |
| JP5907912B2 (ja) | エレベータ用レールの試験装置および試験方法 | |
| JP2010168185A (ja) | エレベータ装置 | |
| JP5026677B2 (ja) | エレベータおよびこのエレベータを備えたエレベータ遠隔監視システム | |
| KR102322670B1 (ko) | 엘리베이터의 구동 로프 결함 검출 장치 | |
| JP2010052875A (ja) | エレベーターのブレーキの制動力および保持力の点検方法 | |
| JP2016055960A (ja) | エレベータの地震自動復旧運転装置 | |
| JP4607214B2 (ja) | エレベータシステム | |
| JP2011256001A (ja) | エレベータ装置 | |
| JP6651660B1 (ja) | 乗りかごの突き上げ検知装置 | |
| JP2002302360A (ja) | エレベータの非常止め装置 | |
| JP2004115244A (ja) | エレベータの保守点検方法および保守点検用ストッパー | |
| KR101607163B1 (ko) | 임시 엘리베이터 카의 추락 감지 장치 | |
| JP7643490B2 (ja) | エレベータ | |
| JP2012056678A (ja) | エレベータ巻上機の据付方法及び装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190425 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200420 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200609 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200709 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6734434 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |