JP2025068942A - 工具ホルダの位置決め機構 - Google Patents
工具ホルダの位置決め機構 Download PDFInfo
- Publication number
- JP2025068942A JP2025068942A JP2023179076A JP2023179076A JP2025068942A JP 2025068942 A JP2025068942 A JP 2025068942A JP 2023179076 A JP2023179076 A JP 2023179076A JP 2023179076 A JP2023179076 A JP 2023179076A JP 2025068942 A JP2025068942 A JP 2025068942A
- Authority
- JP
- Japan
- Prior art keywords
- tool holder
- lever member
- bolt
- positioning
- positioning mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Landscapes
- Cutting Tools, Boring Holders, And Turrets (AREA)
Abstract
【課題】ホルダ保持装置に手を加えることなく、省スペースで容易に工具ホルダの位置決めが可能で、十分な調整代も確保できるようにする。
【解決手段】位置決め機構15は、工具ホルダ10に設けられる基準ブロック16と、工具ホルダ10の位置を調整可能な位置調整部17とを有する。位置調整部17は、工具ホルダ10に設けられたボルト20と、取付面2と当接する支点片27の下端を支点として傾動可能に設けられ、当該傾動によりボルト20を押圧可能なテコ部材19と、テコ部材19に対して移動可能に設けられ、テコ部材19への移動操作によりテコ部材19を押圧可能な操作ネジ22と、を含む。操作ネジ22は、取付面2との直交方向へ移動可能に設けられ、移動操作によりテコ部材19を押圧して支点片27の下端を支点として傾動させることで、テコ部材19を介してボルト20を押圧し、工具ホルダ10を固定位置へ移動させる。
【選択図】図2
【解決手段】位置決め機構15は、工具ホルダ10に設けられる基準ブロック16と、工具ホルダ10の位置を調整可能な位置調整部17とを有する。位置調整部17は、工具ホルダ10に設けられたボルト20と、取付面2と当接する支点片27の下端を支点として傾動可能に設けられ、当該傾動によりボルト20を押圧可能なテコ部材19と、テコ部材19に対して移動可能に設けられ、テコ部材19への移動操作によりテコ部材19を押圧可能な操作ネジ22と、を含む。操作ネジ22は、取付面2との直交方向へ移動可能に設けられ、移動操作によりテコ部材19を押圧して支点片27の下端を支点として傾動させることで、テコ部材19を介してボルト20を押圧し、工具ホルダ10を固定位置へ移動させる。
【選択図】図2
Description
本開示は、工具が取り付けられた工具ホルダをタレット等のホルダ保持装置に固定する際、工具ホルダをホルダ保持装置に位置決めするための位置決め機構に関する。
例えば旋盤に設けた刃物台には、タレットの周面に複数の工具ホルダが固定されている。図15Aに示すように、工具ホルダ60は、タレット50の取付面51に固定されて、タレット50から突出する突出端部に工具61が取り付けられている。工具ホルダ60は、図示しない固定ボルトで取付面51に固定される。
工具ホルダ60の突出端部の底面には、タレット50への固定位置でタレット50の端面に当接する基準ブロック62が設けられている。工具ホルダ60の突出端部と反対側の端部には、工具ホルダ60を固定位置で位置決めする位置決め機構63が設けられている。この位置決め機構63は、工具ホルダ60の端面から下向きに突出してタレット50の反対側の端面に当接するテコ式ガイド64と、このテコ式ガイド64をタレット50の端面を押圧する方向へ傾動させる図示しない送りネジとを備えている。ここでは六角棒レンチ65等の工具で送りネジを回転操作してテコ式ガイド64を傾動させると、工具ホルダ60が矢印の方向に引っ張られて基準ブロック62がタレット50の端面に当接する固定位置に位置決めされる。位置決め後、工具ホルダ60に上方から貫通させた固定ボルトを取付面51の図示しないネジ孔にねじ込むと、工具ホルダ60が固定される。
工具ホルダ60の突出端部の底面には、タレット50への固定位置でタレット50の端面に当接する基準ブロック62が設けられている。工具ホルダ60の突出端部と反対側の端部には、工具ホルダ60を固定位置で位置決めする位置決め機構63が設けられている。この位置決め機構63は、工具ホルダ60の端面から下向きに突出してタレット50の反対側の端面に当接するテコ式ガイド64と、このテコ式ガイド64をタレット50の端面を押圧する方向へ傾動させる図示しない送りネジとを備えている。ここでは六角棒レンチ65等の工具で送りネジを回転操作してテコ式ガイド64を傾動させると、工具ホルダ60が矢印の方向に引っ張られて基準ブロック62がタレット50の端面に当接する固定位置に位置決めされる。位置決め後、工具ホルダ60に上方から貫通させた固定ボルトを取付面51の図示しないネジ孔にねじ込むと、工具ホルダ60が固定される。
図15Aの位置決め機構63の場合、テコ式ガイド64を操作する六角棒レンチ65を差し込むための空間が必要となる。よって、図15Bのようにテコ式ガイド64に近い位置にカバー52等の干渉物が存在すると、工具ホルダ60の位置決め及び取り外しが困難となる。
そこで、特許文献1には、ツールホルダ(工具ホルダ)の底面に設けたシャンクを、タレットの端面に設けたシャンク穴に差し込むと共に、ツールホルダの底面に、基準穴と、偏心軸部を有する偏心軸を設ける一方、タレットの端面に、基準穴に嵌合する位置決めピンと、偏心軸部が挿入される挿入穴とを設けた工具クランプ装置の発明が開示されている。ここでは偏心軸を回転させて偏心軸部を挿入穴の内周壁に押圧させることで、位置決めピンを相反方向で基準穴に押圧させ、突っ張り力を作用させて固定することができる。
そこで、特許文献1には、ツールホルダ(工具ホルダ)の底面に設けたシャンクを、タレットの端面に設けたシャンク穴に差し込むと共に、ツールホルダの底面に、基準穴と、偏心軸部を有する偏心軸を設ける一方、タレットの端面に、基準穴に嵌合する位置決めピンと、偏心軸部が挿入される挿入穴とを設けた工具クランプ装置の発明が開示されている。ここでは偏心軸を回転させて偏心軸部を挿入穴の内周壁に押圧させることで、位置決めピンを相反方向で基準穴に押圧させ、突っ張り力を作用させて固定することができる。
しかし、特許文献1の工具クランプ装置は、タレットに位置決めピンと挿入穴とを設ける必要があり、余計な加工が必要となる。
また、偏心軸部の回転をツールホルダの直線移動に変換するため、位置決めの調整代が少なくなっている。よって、この装置を回転工具ホルダに採用すると、工具を回転させる歯車の噛み合い位置が適正でない場合が生じても、調整代で噛み合い位置を修正できない状態が起こり得る。この場合、そのまま加工に使用すると騒音の原因となるおそれがある。
また、偏心軸部の回転をツールホルダの直線移動に変換するため、位置決めの調整代が少なくなっている。よって、この装置を回転工具ホルダに採用すると、工具を回転させる歯車の噛み合い位置が適正でない場合が生じても、調整代で噛み合い位置を修正できない状態が起こり得る。この場合、そのまま加工に使用すると騒音の原因となるおそれがある。
そこで、本開示は、タレット等のホルダ保持装置に手を加えることなく、省スペースで容易に工具ホルダの位置決めが可能となり、十分な調整代も確保できる工具ホルダの位置決め機構を提供することを目的としたものである。
上記目的を達成するために、本開示は、工具を保持する工具ホルダを、ホルダ保持装置の取付面における所定の固定位置へ位置決めするための位置決め機構であって、
前記工具ホルダに設けられ、前記固定位置で前記ホルダ保持装置に当接可能な基準ブロックと、前記取付面に対する前記工具ホルダの位置を調整可能な位置調整部と、を有し、
前記位置調整部は、前記工具ホルダに設けられた被押圧部と、前記取付面と当接してその当接部位を支点として傾動可能に設けられ、当該傾動により前記被押圧部を押圧可能なテコ部材と、前記テコ部材に対して移動可能に設けられ、前記テコ部材への移動操作により前記テコ部材を押圧可能な操作部材と、を含み、
前記操作部材は、前記取付面との交差方向へ移動可能に設けられ、移動操作により前記テコ部材を押圧して前記取付面との当接部位を支点として傾動させることで、前記テコ部材を介して前記被押圧部を押圧し、前記工具ホルダを前記固定位置へ移動させることを特徴とする。
本開示の別の態様は、上記構成において、前記位置調整部は、前記テコ部材を前記被押圧部と直接又は間接的に当接させた状態で保持する弾性部材をさらに有することを特徴とする。
本開示の別の態様は、上記構成において、前記工具ホルダは、前記位置調整部を収容する収容部を有し、
前記位置調整部は、前記テコ部材を前記交差方向に付勢して前記テコ部材を前記収容部の内面に当接させる付勢手段をさらに有し、前記操作部材の移動操作により前記テコ部材を押圧することで、前記テコ部材は、前記取付面との当接部位を支点として変形を伴いながら傾動することを特徴とする。
本開示の別の態様は、上記構成において、前記テコ部材は、前記工具ホルダが前記固定位置に達した際に前記ホルダ保持装置に当接するストッパを有し、前記基準ブロックと前記ストッパとで前記ホルダ保持装置を挟持して前記工具ホルダを前記固定位置に位置決めすることを特徴とする。
本開示の別の態様は、上記構成において、前記被押圧部は、前記交差方向で前記テコ部材を貫通して前記工具ホルダにねじ込み結合されるボルトであり、前記テコ部材は、前記操作部材の押圧による傾動の際には、前記ボルトの貫通孔が前記ボルトを押圧して前記工具ホルダを移動させることを特徴とする。
前記工具ホルダに設けられ、前記固定位置で前記ホルダ保持装置に当接可能な基準ブロックと、前記取付面に対する前記工具ホルダの位置を調整可能な位置調整部と、を有し、
前記位置調整部は、前記工具ホルダに設けられた被押圧部と、前記取付面と当接してその当接部位を支点として傾動可能に設けられ、当該傾動により前記被押圧部を押圧可能なテコ部材と、前記テコ部材に対して移動可能に設けられ、前記テコ部材への移動操作により前記テコ部材を押圧可能な操作部材と、を含み、
前記操作部材は、前記取付面との交差方向へ移動可能に設けられ、移動操作により前記テコ部材を押圧して前記取付面との当接部位を支点として傾動させることで、前記テコ部材を介して前記被押圧部を押圧し、前記工具ホルダを前記固定位置へ移動させることを特徴とする。
本開示の別の態様は、上記構成において、前記位置調整部は、前記テコ部材を前記被押圧部と直接又は間接的に当接させた状態で保持する弾性部材をさらに有することを特徴とする。
本開示の別の態様は、上記構成において、前記工具ホルダは、前記位置調整部を収容する収容部を有し、
前記位置調整部は、前記テコ部材を前記交差方向に付勢して前記テコ部材を前記収容部の内面に当接させる付勢手段をさらに有し、前記操作部材の移動操作により前記テコ部材を押圧することで、前記テコ部材は、前記取付面との当接部位を支点として変形を伴いながら傾動することを特徴とする。
本開示の別の態様は、上記構成において、前記テコ部材は、前記工具ホルダが前記固定位置に達した際に前記ホルダ保持装置に当接するストッパを有し、前記基準ブロックと前記ストッパとで前記ホルダ保持装置を挟持して前記工具ホルダを前記固定位置に位置決めすることを特徴とする。
本開示の別の態様は、上記構成において、前記被押圧部は、前記交差方向で前記テコ部材を貫通して前記工具ホルダにねじ込み結合されるボルトであり、前記テコ部材は、前記操作部材の押圧による傾動の際には、前記ボルトの貫通孔が前記ボルトを押圧して前記工具ホルダを移動させることを特徴とする。
本開示によれば、テコ部材を押圧する操作部材が取付面との交差方向へ移動操作されるので、工具ホルダの位置決め機構側にカバー等の干渉物があっても支障なく位置決め操作が可能となる。また、ホルダ保持装置に位置決めのための構成部を設けることなく、工具ホルダにテコ部材を含む位置調整部を設けるだけで位置決めが行えると共に、傾動するテコ部材によって工具ホルダの移動が効率よく行える。よって、ホルダ保持装置に手を加えることなく、省スペースで容易に工具ホルダの位置決めが可能となり、十分な調整代も確保できる。
以下、本開示の実施の形態を図面に基づいて説明する。
[形態1]
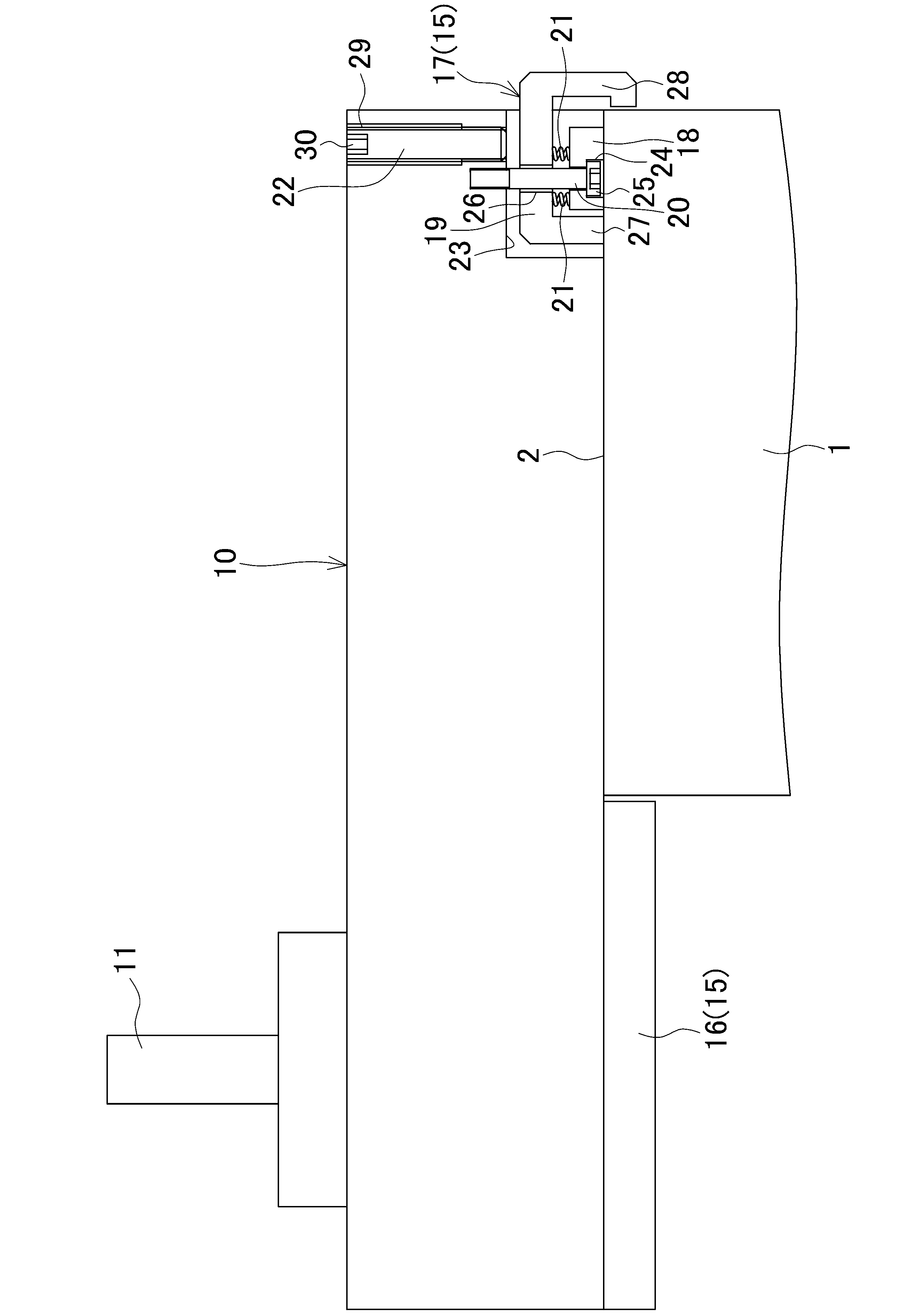
図1は、旋盤のタレットに固定される工具ホルダに本開示の位置決め機構を適用した一例を示す説明図である。図1Aが平面、図1Bが背面をそれぞれ示している。図2は、図1BのA-A線拡大断面図である。ここでは説明の便宜上、工具ホルダ10が突出する図1A及び図2の左側を前方、右側を後方として説明する。図1Bでは上側が上方となる。
タレット1の周面には、工具ホルダ10の取付面2が形成されている。取付面2には、工具ホルダ10を固定するための4本の固定ボルト4,4・・がねじ込まれる4つのネジ孔3,3・・が形成されている。タレット1は、本開示のホルダ保持装置の一例である。
工具ホルダ10は、タレット1の中心軸方向と平行となる前後方向に延びるブロック状で、工具11が取り付けられる前端がタレット1から前方へ突出した状態で固定される。
[形態1]
図1は、旋盤のタレットに固定される工具ホルダに本開示の位置決め機構を適用した一例を示す説明図である。図1Aが平面、図1Bが背面をそれぞれ示している。図2は、図1BのA-A線拡大断面図である。ここでは説明の便宜上、工具ホルダ10が突出する図1A及び図2の左側を前方、右側を後方として説明する。図1Bでは上側が上方となる。
タレット1の周面には、工具ホルダ10の取付面2が形成されている。取付面2には、工具ホルダ10を固定するための4本の固定ボルト4,4・・がねじ込まれる4つのネジ孔3,3・・が形成されている。タレット1は、本開示のホルダ保持装置の一例である。
工具ホルダ10は、タレット1の中心軸方向と平行となる前後方向に延びるブロック状で、工具11が取り付けられる前端がタレット1から前方へ突出した状態で固定される。
工具ホルダ10には、取付面2の固定位置に位置決めするための位置決め機構15が設けられている。位置決め機構15は、基準ブロック16と、位置調整部17とを備えている。
基準ブロック16は、工具ホルダ10の前部底面へ一体に設けられて、下方へ突出する平面視矩形状となっている。基準ブロック16は、図15と同様に、工具ホルダ10の取付面2への固定位置で後面がタレット1の前面に当接する。
位置調整部17は、図3Aにも示すように、ベース部材18と、テコ部材19と、ボルト20と、4つのコイルバネ21,21・・と、操作ネジ22とを有している。工具ホルダ10の後部下側には、下面及び後面に開口して操作ネジ22を除く位置調整部17を収容する収容部23が切り欠き形成されている。
ベース部材18は、左右方向に延びる横長四角形の板体で、左右方向の中央には、下貫通孔24が形成されている。下貫通孔24の下部は、ボルト20の頭部25が収まるように上部よりも大径となっている。
基準ブロック16は、工具ホルダ10の前部底面へ一体に設けられて、下方へ突出する平面視矩形状となっている。基準ブロック16は、図15と同様に、工具ホルダ10の取付面2への固定位置で後面がタレット1の前面に当接する。
位置調整部17は、図3Aにも示すように、ベース部材18と、テコ部材19と、ボルト20と、4つのコイルバネ21,21・・と、操作ネジ22とを有している。工具ホルダ10の後部下側には、下面及び後面に開口して操作ネジ22を除く位置調整部17を収容する収容部23が切り欠き形成されている。
ベース部材18は、左右方向に延びる横長四角形の板体で、左右方向の中央には、下貫通孔24が形成されている。下貫通孔24の下部は、ボルト20の頭部25が収まるように上部よりも大径となっている。
テコ部材19は、ベース部材18と同様に左右方向へ延びる横長四角形の板状であるが、前後方向の長さはベース部材18よりも大きく形成されて、後端を収容部23から後方へ突出させている。テコ部材19の左右方向の中央には、上貫通孔26が形成されている。テコ部材19の前端には、下方へ直角に折曲されて下端が取付面2に当接する支点片27が形成されている。支点片27の下端は、本開示の取付面との当接部位の一例である。
テコ部材19の後端には、下方へ直角に折曲されてタレット1の後方まで延びた後、下端が前方へ直角に突出するストッパ片28が形成されている。ストッパ片28は、本開示のストッパの一例である。
テコ部材19の後端には、下方へ直角に折曲されてタレット1の後方まで延びた後、下端が前方へ直角に突出するストッパ片28が形成されている。ストッパ片28は、本開示のストッパの一例である。
ボルト20は、ベース部材18の下貫通孔24とテコ部材19の上貫通孔26とをそれぞれ下方から貫通して、収容部23の上面にねじ込み結合されている。ボルト20は、頭部25が下貫通孔24の下部に収まって収容部23から下方へ突出しない位置までねじ込まれている。下貫通孔24と上貫通孔26とは、共にボルト20よりも大径であるが、上貫通孔26は、下貫通孔24の上部よりも大径に形成されている。ボルト20は、本開示の被押圧部の一例である。
コイルバネ21,21・・は、ベース部材18とテコ部材19との間でボルト20の左右に2つずつ配置されている。左右2つのコイルバネ21,21は、側面視でボルト20の前後に位置している。ベース部材18は、自重により下貫通孔24の下部上面にボルト20の頭部25が当接する下限位置にあり、テコ部材19は、各コイルバネ21により、ベース部材18から上方へ離間する位置で支持される。但し、テコ部材19は収容部23の上面に当接しない。
コイルバネ21,21・・は、ベース部材18とテコ部材19との間でボルト20の左右に2つずつ配置されている。左右2つのコイルバネ21,21は、側面視でボルト20の前後に位置している。ベース部材18は、自重により下貫通孔24の下部上面にボルト20の頭部25が当接する下限位置にあり、テコ部材19は、各コイルバネ21により、ベース部材18から上方へ離間する位置で支持される。但し、テコ部材19は収容部23の上面に当接しない。
操作ネジ22は、収容部23の上側で工具ホルダ10へ上下方向に貫通形成されて下部が雌ネジとなる調整孔29に螺合している。調整孔29は、ボルト20よりも後方で工具ホルダ10の左右方向の中央に形成されている。操作ネジ22は、六角穴30を備えた上端が工具ホルダ10の上面と一致するねじ込み位置で、下端を収容部23の下面に一致させている。操作ネジ22は、回転操作により、取付面2と直交する上下方向に移動可能である。操作ネジ22は、本開示の操作部材の一例である。上下方向は、本開示の取付面との交差方向の一例である。
以上の如く構成された位置決め機構15において、工具ホルダ10を位置決めする際、図2及び図3Aに示すように、工具ホルダ10の後部を取付面2に載置して、基準ブロック16をタレット1の前面に近接或いは当接する位置にセットする。この状態でテコ部材19のストッパ片28は、工具ホルダ10の下面を越えて下方へ延び、その下端をタレット1の後面に近接させている。
この状態で操作ネジ22の六角穴30に六角棒レンチを上方から嵌合させてねじ込み方向へ回転させると、図3Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29に螺合した操作ネジ22のねじ込みを続けると、テコ部材19は、支点片27の下面後側の角を支点として図3Bにおける右回転方向へ傾動する。よって、上貫通孔26の上側の開口の前端がボルト20に当接してボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
この状態で操作ネジ22の六角穴30に六角棒レンチを上方から嵌合させてねじ込み方向へ回転させると、図3Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29に螺合した操作ネジ22のねじ込みを続けると、テコ部材19は、支点片27の下面後側の角を支点として図3Bにおける右回転方向へ傾動する。よって、上貫通孔26の上側の開口の前端がボルト20に当接してボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
このように、上記形態1の位置決め機構15は、工具ホルダ10に設けられ、固定位置でタレット1に当接可能な基準ブロック16と、取付面2に対する工具ホルダ10の位置を調整可能な位置調整部17とを有する。
位置調整部17は、工具ホルダ10に設けられたボルト20と、取付面2と当接する支点片27の下端を支点として傾動可能に設けられ、当該傾動によりボルト20を押圧可能なテコ部材19と、テコ部材19に対して移動可能に設けられ、テコ部材19への移動操作によりテコ部材19を押圧可能な操作ネジ22と、を含む。
そして、操作ネジ22は、取付面2との直交方向へ移動可能に設けられ、移動操作によりテコ部材19を押圧して支点片27の下端を支点として傾動させることで、テコ部材19を介してボルト20を押圧し、工具ホルダ10を固定位置へ移動させる。
位置調整部17は、工具ホルダ10に設けられたボルト20と、取付面2と当接する支点片27の下端を支点として傾動可能に設けられ、当該傾動によりボルト20を押圧可能なテコ部材19と、テコ部材19に対して移動可能に設けられ、テコ部材19への移動操作によりテコ部材19を押圧可能な操作ネジ22と、を含む。
そして、操作ネジ22は、取付面2との直交方向へ移動可能に設けられ、移動操作によりテコ部材19を押圧して支点片27の下端を支点として傾動させることで、テコ部材19を介してボルト20を押圧し、工具ホルダ10を固定位置へ移動させる。
この構成によれば、テコ部材19を押圧する操作ネジ22が取付面2との直交方向へ移動操作されるので、工具ホルダ10の後方にカバー等の干渉物があっても、工具ホルダ10の上方から支障なく位置決め操作が可能となる。また、タレット1に位置決めのための構成部を設けることなく、工具ホルダ10にテコ部材19を含む位置調整部17を設けるだけで位置決めが行えると共に、傾動するテコ部材19によって工具ホルダ10の移動が効率よく行える。よって、タレット1に手を加えることなく、省スペースで容易に工具ホルダ10の位置決めが可能となり、十分な調整代も確保できる。
特に、テコ部材19は、工具ホルダ10が固定位置に達した際にタレット1に当接するストッパ片28を有し、基準ブロック16とストッパ片28とでタレット1を挟持して工具ホルダ10を固定位置に位置決めするので、正確な位置決めが迅速に行えると共に、操作ネジ22の過度なねじ込み操作が防止可能となる。
また、被押圧部を、上下方向でテコ部材19を貫通して工具ホルダ10にねじ込み結合されるボルト20として、テコ部材19は、操作ネジ22の押圧による傾動の際、ボルト20の上貫通孔26がボルト20を押圧して工具ホルダ10を移動させるようにしているので、ボルト20を利用したテコ部材19の支持と工具ホルダ10の移動とが容易に行える。
特に、テコ部材19は、工具ホルダ10が固定位置に達した際にタレット1に当接するストッパ片28を有し、基準ブロック16とストッパ片28とでタレット1を挟持して工具ホルダ10を固定位置に位置決めするので、正確な位置決めが迅速に行えると共に、操作ネジ22の過度なねじ込み操作が防止可能となる。
また、被押圧部を、上下方向でテコ部材19を貫通して工具ホルダ10にねじ込み結合されるボルト20として、テコ部材19は、操作ネジ22の押圧による傾動の際、ボルト20の上貫通孔26がボルト20を押圧して工具ホルダ10を移動させるようにしているので、ボルト20を利用したテコ部材19の支持と工具ホルダ10の移動とが容易に行える。
以下、本開示の変更例を説明する。但し、形態1と同じ構成部には同じ符号を付して重複する説明を省略し、位置調整部17を中心に説明する。
[形態2]
図4Aに示す位置決め機構15Aでは、テコ部材19に、先端にボール36を備えたスプリングプランジャ35が設けられている点が形態1と異なっている。テコ部材19の左右方向の中央には、ストッパ片28の後方から前後方向に貫通して前部が雌ネジとなる貫通孔37が形成されている。スプリングプランジャ35は、貫通孔37に後方から挿入されて雌ネジに螺合し、先端のボール36を上貫通孔26内に突出させている。ボール36は、図示しないバネによって前方へ突出付勢されて、ボルト20を上貫通孔26の前側内面に押圧している。よって、位置決め前のテコ部材19は、スプリングプランジャ35により後方へ付勢されて、上貫通孔26の前側内面にボルト20が当接する図4Aの位置に保持される。スプリングプランジャ35は、本開示の弾性部材の一例である。
[形態2]
図4Aに示す位置決め機構15Aでは、テコ部材19に、先端にボール36を備えたスプリングプランジャ35が設けられている点が形態1と異なっている。テコ部材19の左右方向の中央には、ストッパ片28の後方から前後方向に貫通して前部が雌ネジとなる貫通孔37が形成されている。スプリングプランジャ35は、貫通孔37に後方から挿入されて雌ネジに螺合し、先端のボール36を上貫通孔26内に突出させている。ボール36は、図示しないバネによって前方へ突出付勢されて、ボルト20を上貫通孔26の前側内面に押圧している。よって、位置決め前のテコ部材19は、スプリングプランジャ35により後方へ付勢されて、上貫通孔26の前側内面にボルト20が当接する図4Aの位置に保持される。スプリングプランジャ35は、本開示の弾性部材の一例である。
以上の如く構成された位置決め機構15Aにおいて、工具ホルダ10を位置決めする際、図4Aに示すように、工具ホルダ10の後部を取付面2に載置して、基準ブロック16をタレット1の前面に近接或いは当接する位置にセットする。
この状態で操作ネジ22をねじ込み方向へ回転させると、図4Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、支点片27の下面後側の角を支点として右回転方向へ傾き、同様に傾いた上貫通孔26の上側の開口の前端がボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。このように、テコ部材19が傾くにつれてスプリングプランジャ35のボール36は没入方向へ押し込まれ、その反発力でボルト20と上貫通孔26の上端との当接状態を維持する。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
この状態で操作ネジ22をねじ込み方向へ回転させると、図4Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、支点片27の下面後側の角を支点として右回転方向へ傾き、同様に傾いた上貫通孔26の上側の開口の前端がボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。このように、テコ部材19が傾くにつれてスプリングプランジャ35のボール36は没入方向へ押し込まれ、その反発力でボルト20と上貫通孔26の上端との当接状態を維持する。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
このように、上記形態2の位置決め機構15Aにおいても、工具ホルダ10の後方にカバー等の干渉物があっても、工具ホルダ10の上方から支障なく位置決め操作が可能となる。また、タレット1に位置決めのための構成部を設けることなく、工具ホルダ10にテコ部材19を含む位置調整部17を設けるだけで位置決めが行えると共に、傾動するテコ部材19によって工具ホルダ10の移動が効率よく行える。よって、タレット1に手を加えることなく、省スペースで容易に工具ホルダ10の位置決めが可能となり、十分な調整代も確保できる。
特に形態2では、位置調整部17は、テコ部材19をボルト20と直接当接させた状態で保持するスプリングプランジャ35を備えているので、形態1よりも位置決め時の動作のばらつきが小さくなる。
特に形態2では、位置調整部17は、テコ部材19をボルト20と直接当接させた状態で保持するスプリングプランジャ35を備えているので、形態1よりも位置決め時の動作のばらつきが小さくなる。
[形態3]
図5Aに示す位置決め機構15Bでは、スプリングプランジャに代えて、ベース部材18とストッパ片28との間にコイルバネ38が設けられている点が形態2と異なっている。コイルバネ38は、ベース部材18の後面とストッパ片28の前面との間で前後方向に介在されている。よって、位置決め前のテコ部材19は、コイルバネ38により後方へ付勢されて、上貫通孔26の前側内面にボルト20が当接する図5Aの位置に保持される。コイルバネ38は、本開示の弾性部材の一例である。
図5Aに示す位置決め機構15Bでは、スプリングプランジャに代えて、ベース部材18とストッパ片28との間にコイルバネ38が設けられている点が形態2と異なっている。コイルバネ38は、ベース部材18の後面とストッパ片28の前面との間で前後方向に介在されている。よって、位置決め前のテコ部材19は、コイルバネ38により後方へ付勢されて、上貫通孔26の前側内面にボルト20が当接する図5Aの位置に保持される。コイルバネ38は、本開示の弾性部材の一例である。
以上の如く構成された位置決め機構15Bにおいて、工具ホルダ10を位置決めする際、図5Aに示すように、工具ホルダ10の後部を取付面2に載置して、基準ブロック16をタレット1の前面に近接或いは当接する位置にセットする。
この状態で操作ネジ22をねじ込み方向へ回転させると、図5Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、支点片27の下面後側の角を支点として右回転方向へ傾き、同様に傾いた上貫通孔26の上側の開口の前端がボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。このように、テコ部材19が傾くにつれてコイルバネ38は圧縮され、その反発力でボルト20と上貫通孔26の上端との当接状態を維持する。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
この状態で操作ネジ22をねじ込み方向へ回転させると、図5Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、支点片27の下面後側の角を支点として右回転方向へ傾き、同様に傾いた上貫通孔26の上側の開口の前端がボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。このように、テコ部材19が傾くにつれてコイルバネ38は圧縮され、その反発力でボルト20と上貫通孔26の上端との当接状態を維持する。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
このように、上記形態3の位置決め機構15Bにおいても、工具ホルダ10の後方にカバー等の干渉物があっても、工具ホルダ10の上方から支障なく位置決め操作が可能となる。また、タレット1に位置決めのための構成部を設けることなく、工具ホルダ10にテコ部材19を含む位置調整部17を設けるだけで位置決めが行えると共に、傾動するテコ部材19によって工具ホルダ10の移動が効率よく行える。よって、タレット1に手を加えることなく、省スペースで容易に工具ホルダ10の位置決めが可能となり、十分な調整代も確保できる。
特に形態3では、位置調整部17は、テコ部材19をボルト20と直接当接させた状態で保持するコイルバネ38を備えているので、形態1よりも位置決め時の動作のばらつきが小さくなる。
特に形態3では、位置調整部17は、テコ部材19をボルト20と直接当接させた状態で保持するコイルバネ38を備えているので、形態1よりも位置決め時の動作のばらつきが小さくなる。
[形態4]
図6Aに示す位置決め機構15Cでは、スプリングプランジャ及びコイルバネに代えて、上貫通孔26内でボルト20との間にゴムスリーブ39が介在されている点が形態2,3と異なっている。ゴムスリーブ39は、上貫通孔26内に接着等で一体化されて、内側にボルト20が貫通している。よって、位置決め前のテコ部材19は、ゴムスリーブ39を介してボルト20を保持する図6Aの位置に保持される。ゴムスリーブ39は、本開示の弾性部材の一例である。
図6Aに示す位置決め機構15Cでは、スプリングプランジャ及びコイルバネに代えて、上貫通孔26内でボルト20との間にゴムスリーブ39が介在されている点が形態2,3と異なっている。ゴムスリーブ39は、上貫通孔26内に接着等で一体化されて、内側にボルト20が貫通している。よって、位置決め前のテコ部材19は、ゴムスリーブ39を介してボルト20を保持する図6Aの位置に保持される。ゴムスリーブ39は、本開示の弾性部材の一例である。
以上の如く構成された位置決め機構15Cにおいて、工具ホルダ10を位置決めする際、図6Aに示すように、工具ホルダ10の後部を取付面2に載置して、基準ブロック16をタレット1の前面に近接或いは当接する位置にセットする。
この状態で操作ネジ22をねじ込み方向へ回転させると、図6Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、支点片27の下面後側の角を支点として右回転方向へ傾き、同様に傾いた上貫通孔26の上側の開口の前端がゴムスリーブ39を介してボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。このように、テコ部材19が傾くにつれてゴムスリーブ39は変形し、ボルト20との当接状態を維持する。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
この状態で操作ネジ22をねじ込み方向へ回転させると、図6Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、支点片27の下面後側の角を支点として右回転方向へ傾き、同様に傾いた上貫通孔26の上側の開口の前端がゴムスリーブ39を介してボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。このように、テコ部材19が傾くにつれてゴムスリーブ39は変形し、ボルト20との当接状態を維持する。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
このように、上記形態4の位置決め機構15Cにおいても、工具ホルダ10の後方にカバー等の干渉物があっても、工具ホルダ10の上方から支障なく位置決め操作が可能となる。また、タレット1に位置決めのための構成部を設けることなく、工具ホルダ10にテコ部材19を含む位置調整部17を設けるだけで位置決めが行えると共に、傾動するテコ部材19によって工具ホルダ10の移動が効率よく行える。よって、タレット1に手を加えることなく、省スペースで容易に工具ホルダ10の位置決めが可能となり、十分な調整代も確保できる。
特に形態4では、位置調整部17は、テコ部材19をボルト20と間接的に当接させた状態で保持するゴムスリーブ39を備えているので、形態1よりも位置決め時の動作のばらつきが小さくなる。
特に形態4では、位置調整部17は、テコ部材19をボルト20と間接的に当接させた状態で保持するゴムスリーブ39を備えているので、形態1よりも位置決め時の動作のばらつきが小さくなる。
[形態5]
図7Aに示す位置決め機構15Dでは、テコ部材19が、各コイルバネ21により、上面が収容部23の下面に当接する位置に付勢されている。ボルト20には、金属製でスリーブ状の間座40が外装されている。間座40は、上貫通孔26を貫通してその上端を収容部23の下面に当接させている。また、間座40は、テコ部材19から下方へ延びてその下端をベース部材18の上面に当接させている。コイルバネ21は、本開示の付勢手段の一例である。
図7Aに示す位置決め機構15Dでは、テコ部材19が、各コイルバネ21により、上面が収容部23の下面に当接する位置に付勢されている。ボルト20には、金属製でスリーブ状の間座40が外装されている。間座40は、上貫通孔26を貫通してその上端を収容部23の下面に当接させている。また、間座40は、テコ部材19から下方へ延びてその下端をベース部材18の上面に当接させている。コイルバネ21は、本開示の付勢手段の一例である。
以上の如く構成された位置決め機構15Dにおいて、工具ホルダ10を位置決めする際、図7Aに示すように、工具ホルダ10の後部を取付面2に載置して、基準ブロック16をタレット1の前面に近接或いは当接する位置にセットする。
この状態で操作ネジ22をねじ込み方向へ回転させると、図7Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、ボルト20の後側が下方へ押圧されて変形すると共に、支点片27の下面後側の角を支点として右回転方向へ傾く。よって、上貫通孔26の上側の開口の前端が間座40を押圧し、間座40を僅かに変形させながらボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
この状態で操作ネジ22をねじ込み方向へ回転させると、図7Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、ボルト20の後側が下方へ押圧されて変形すると共に、支点片27の下面後側の角を支点として右回転方向へ傾く。よって、上貫通孔26の上側の開口の前端が間座40を押圧し、間座40を僅かに変形させながらボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
このように、上記形態5の位置決め機構15Dにおいても、工具ホルダ10の後方にカバー等の干渉物があっても、工具ホルダ10の上方から支障なく位置決め操作が可能となる。また、タレット1に位置決めのための構成部を設けることなく、工具ホルダ10にテコ部材19を含む位置調整部17を設けるだけで位置決めが行えると共に、傾動するテコ部材19によって工具ホルダ10の移動が効率よく行える。よって、タレット1に手を加えることなく、省スペースで容易に工具ホルダ10の位置決めが可能となり、十分な調整代も確保できる。
特に形態5では、位置調整部17は、テコ部材19を上方に付勢してテコ部材19を収容部23の内面に当接させるコイルバネ21をさらに有し、操作ネジ22の移動操作によりテコ部材19を押圧することで、テコ部材19は、支点片27の下端を支点として変形を伴いながら回転する構成となっている。
よって、テコ部材19を傾動させる空間を大きく確保する必要がなくなり、テコ部材19を含む位置調整部17をより省スペースで工具ホルダ10に設けることができる。
特に形態5では、位置調整部17は、テコ部材19を上方に付勢してテコ部材19を収容部23の内面に当接させるコイルバネ21をさらに有し、操作ネジ22の移動操作によりテコ部材19を押圧することで、テコ部材19は、支点片27の下端を支点として変形を伴いながら回転する構成となっている。
よって、テコ部材19を傾動させる空間を大きく確保する必要がなくなり、テコ部材19を含む位置調整部17をより省スペースで工具ホルダ10に設けることができる。
[形態6]
図8Aに示す位置決め機構15Eでは、ベース部材が設けられておらず、他の形態よりも短いボルト20が上貫通孔26を貫通して収容部23の下面にねじ込み結合されている。上貫通孔26には、金属製でスリーブ状の間座41が設けられてボルト20が間座41を貫通している。間座41は、形態5の間座40よりも上下方向の長さが短くなっている。コイルバネ21は、テコ部材19の下方でボルト20に外装されて、テコ部材19の下面とボルト20の頭部25との間で圧縮されている。
図8Aに示す位置決め機構15Eでは、ベース部材が設けられておらず、他の形態よりも短いボルト20が上貫通孔26を貫通して収容部23の下面にねじ込み結合されている。上貫通孔26には、金属製でスリーブ状の間座41が設けられてボルト20が間座41を貫通している。間座41は、形態5の間座40よりも上下方向の長さが短くなっている。コイルバネ21は、テコ部材19の下方でボルト20に外装されて、テコ部材19の下面とボルト20の頭部25との間で圧縮されている。
以上の如く構成された位置決め機構15Eにおいて、工具ホルダ10を位置決めする際、図8Aに示すように、工具ホルダ10の後部を取付面2に載置して、基準ブロック16をタレット1の前面に近接或いは当接する位置にセットする。
この状態で操作ネジ22をねじ込み方向へ回転させると、図8Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、ボルト20の後側が下方へ押圧されて変形すると共に、支点片27の下面後側の角を支点として右回転方向へ傾く。よって、上貫通孔26の上側の開口の前端が間座41を押圧し、間座41を僅かに変形させながらボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
この状態で操作ネジ22をねじ込み方向へ回転させると、図8Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、ボルト20の後側が下方へ押圧されて変形すると共に、支点片27の下面後側の角を支点として右回転方向へ傾く。よって、上貫通孔26の上側の開口の前端が間座41を押圧し、間座41を僅かに変形させながらボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
このように、上記形態6の位置決め機構15Eにおいても、工具ホルダ10の後方にカバー等の干渉物があっても、工具ホルダ10の上方から支障なく位置決め操作が可能となる。また、タレット1に位置決めのための構成部を設けることなく、工具ホルダ10にテコ部材19を含む位置調整部17を設けるだけで位置決めが行えると共に、傾動するテコ部材19によって工具ホルダ10の移動が効率よく行える。よって、タレット1に手を加えることなく、省スペースで容易に工具ホルダ10の位置決めが可能となり、十分な調整代も確保できる。
特に形態6では、位置調整部17は、テコ部材19を上方に付勢してテコ部材19を収容部23の内面に当接させるコイルバネ21をさらに有し、操作ネジ22の移動操作によりテコ部材19を押圧することで、テコ部材19は、支点片27の下端を支点として変形を伴いながら回転する構成となっている。
よって、テコ部材19を傾動させる空間を大きく確保する必要がなくなり、テコ部材19を含む位置調整部17をより省スペースで工具ホルダ10に設けることができる。また、ベース部材を設けない分部品点数が削減されて位置決め機構15Eの上下方向の寸法が一層コンパクト化する。よって、工具ホルダ10の厚みを確保できる利点がある。
なお、ベース部材の省略は、他の形態においても実施することができる。
特に形態6では、位置調整部17は、テコ部材19を上方に付勢してテコ部材19を収容部23の内面に当接させるコイルバネ21をさらに有し、操作ネジ22の移動操作によりテコ部材19を押圧することで、テコ部材19は、支点片27の下端を支点として変形を伴いながら回転する構成となっている。
よって、テコ部材19を傾動させる空間を大きく確保する必要がなくなり、テコ部材19を含む位置調整部17をより省スペースで工具ホルダ10に設けることができる。また、ベース部材を設けない分部品点数が削減されて位置決め機構15Eの上下方向の寸法が一層コンパクト化する。よって、工具ホルダ10の厚みを確保できる利点がある。
なお、ベース部材の省略は、他の形態においても実施することができる。
[形態7]
図9Aに示す位置決め機構15Fでは、形態5において、テコ部材19にストッパ片28を設けない例を示している。それ以外は図7Aと同様で、テコ部材19は収容部23の下面に当接し、ボルト20には、形態5と同様に上下方向に長い間座40が外装されている。
図9Aに示す位置決め機構15Fでは、形態5において、テコ部材19にストッパ片28を設けない例を示している。それ以外は図7Aと同様で、テコ部材19は収容部23の下面に当接し、ボルト20には、形態5と同様に上下方向に長い間座40が外装されている。
以上の如く構成された位置決め機構15Fにおいて、工具ホルダ10を位置決めする際、図9Aに示すように、工具ホルダ10の後部を取付面2に載置して、基準ブロック16をタレット1の前面に近接或いは当接する位置にセットする。
この状態で操作ネジ22をねじ込み方向へ回転させると、図9Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、ボルト20の後側が下方へ押圧されて変形すると共に、支点片27の下面後側の角を支点として右回転方向へ傾く。よって、上貫通孔26の上側の開口の前端が間座40を押圧し、間座40を僅かに変形させながらボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。
ここではテコ部材19にストッパ片が設けられていないので、取付面2のネジ孔3に合わせて工具ホルダ10の前後位置の微調整ができる。微調整後、各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
この状態で操作ネジ22をねじ込み方向へ回転させると、図9Bに示すように、操作ネジ22が収容部23内に突出してボルト20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、ボルト20の後側が下方へ押圧されて変形すると共に、支点片27の下面後側の角を支点として右回転方向へ傾く。よって、上貫通孔26の上側の開口の前端が間座40を押圧し、間座40を僅かに変形させながらボルト20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。
ここではテコ部材19にストッパ片が設けられていないので、取付面2のネジ孔3に合わせて工具ホルダ10の前後位置の微調整ができる。微調整後、各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
このように、上記形態7の位置決め機構15Fにおいても、工具ホルダ10の後方にカバー等の干渉物があっても、工具ホルダ10の上方から支障なく位置決め操作が可能となる。また、タレット1に位置決めのための構成部を設けることなく、工具ホルダ10にテコ部材19を含む位置調整部17を設けるだけで位置決めが行えると共に、傾動するテコ部材19によって工具ホルダ10の移動が効率よく行える。よって、タレット1に手を加えることなく、省スペースで容易に工具ホルダ10の位置決めが可能となり、十分な調整代も確保できる。
特に形態7では、位置調整部17は、テコ部材19を上方に付勢してテコ部材19を収容部23の内面に当接させるコイルバネ21をさらに有し、操作ネジ22の移動操作によりテコ部材19を押圧することで、テコ部材19は、支点片27の下端を支点として変形を伴いながら回転する構成となっている。
よって、テコ部材19を傾動させる空間を大きく確保する必要がなくなり、テコ部材19を含む位置調整部17をより省スペースで工具ホルダ10に設けることができる。また、テコ部材19にストッパ片を設けず、基準ブロック16との間でタレット1を挟持して位置決めしないので、工具ホルダ10の位置を他の形態よりも自由に調整できる利点がある。
なお、ストッパ片の省略は、他の形態においても実施することができる。
特に形態7では、位置調整部17は、テコ部材19を上方に付勢してテコ部材19を収容部23の内面に当接させるコイルバネ21をさらに有し、操作ネジ22の移動操作によりテコ部材19を押圧することで、テコ部材19は、支点片27の下端を支点として変形を伴いながら回転する構成となっている。
よって、テコ部材19を傾動させる空間を大きく確保する必要がなくなり、テコ部材19を含む位置調整部17をより省スペースで工具ホルダ10に設けることができる。また、テコ部材19にストッパ片を設けず、基準ブロック16との間でタレット1を挟持して位置決めしないので、工具ホルダ10の位置を他の形態よりも自由に調整できる利点がある。
なお、ストッパ片の省略は、他の形態においても実施することができる。
[形態8]
図10Aに示す位置決め機構15Gでは、図11に示すように、ボルト20,20が左右に2本設けられている。テコ部材19は、収容部23の上面に当接し、左右の上貫通孔26,26には、ベース部材18の上面に当接する間座41,41が設けられてボルト20,20に外装されている。
図12は、位置調整部17を取り出した説明図で、図12Aが平面、図12Bが側面、図12Cが背面となっている。図13は位置調整部17の斜視図、図14は位置調整部17の分解斜視図である。
位置調整部17において、ストッパ片28を除くテコ部材19の前後方向の長さは、ベース部材18と同じ寸法となって、支点片27は、テコ部材19の前端下面から下向きに形成されている。よって、ベース部材18の前端には、支点片27が貫通する切欠部42が形成されている。
コイルバネ21,21も左右に2つ設けられている。ベース部材18の上面で下貫通孔24,24よりも後方には、下貫通孔24,24よりも左右の間隔が小さい凹部43,43が形成されている。コイルバネ21,21は、凹部43,43にそれぞれ下部が収容されて上端をテコ部材19の下面に当接させている。
図10Aに示す位置決め機構15Gでは、図11に示すように、ボルト20,20が左右に2本設けられている。テコ部材19は、収容部23の上面に当接し、左右の上貫通孔26,26には、ベース部材18の上面に当接する間座41,41が設けられてボルト20,20に外装されている。
図12は、位置調整部17を取り出した説明図で、図12Aが平面、図12Bが側面、図12Cが背面となっている。図13は位置調整部17の斜視図、図14は位置調整部17の分解斜視図である。
位置調整部17において、ストッパ片28を除くテコ部材19の前後方向の長さは、ベース部材18と同じ寸法となって、支点片27は、テコ部材19の前端下面から下向きに形成されている。よって、ベース部材18の前端には、支点片27が貫通する切欠部42が形成されている。
コイルバネ21,21も左右に2つ設けられている。ベース部材18の上面で下貫通孔24,24よりも後方には、下貫通孔24,24よりも左右の間隔が小さい凹部43,43が形成されている。コイルバネ21,21は、凹部43,43にそれぞれ下部が収容されて上端をテコ部材19の下面に当接させている。
以上の如く構成された位置決め機構15Gにおいて、工具ホルダ10を位置決めする際、図10Aに示すように、工具ホルダ10の後部を取付面2に載置して、基準ブロック16をタレット1の前面に近接或いは当接する位置にセットする。
この状態で操作ネジ22をねじ込み方向へ回転させると、図10Bに示すように、操作ネジ22が収容部23内に突出してボルト20,20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、ボルト20,20の後側が下方へ押圧されて変形すると共に、支点片27の下面後側の角を支点として右回転方向へ傾く。よって、上貫通孔26,26の上側の開口の前端が間座41,41を押圧し、間座41,41を僅かに変形させながらボルト20,20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
この状態で操作ネジ22をねじ込み方向へ回転させると、図10Bに示すように、操作ネジ22が収容部23内に突出してボルト20,20の後方でテコ部材19に当接する。調整孔29への操作ネジ22のねじ込みを続けると、テコ部材19は、ボルト20,20の後側が下方へ押圧されて変形すると共に、支点片27の下面後側の角を支点として右回転方向へ傾く。よって、上貫通孔26,26の上側の開口の前端が間座41,41を押圧し、間座41,41を僅かに変形させながらボルト20,20を後方へ押圧し、そのまま工具ホルダ10を矢印で示すように後方へスライドさせる。
基準ブロック16がタレット1の前面に押圧されてテコ部材19のストッパ片28の下端がタレット1の後面に当接すると、テコ部材19の傾動が停止し、工具ホルダ10の位置決めが完了する。よって、この位置で各固定ボルト4をネジ孔3にそれぞれねじ込めば、工具ホルダ10の固定が完了する。
このように、上記形態8の位置決め機構15Gにおいても、工具ホルダ10の後方にカバー等の干渉物があっても、工具ホルダ10の上方から支障なく位置決め操作が可能となる。また、タレット1に位置決めのための構成部を設けることなく、工具ホルダ10にテコ部材19を含む位置調整部17を設けるだけで位置決めが行えると共に、傾動するテコ部材19によって工具ホルダ10の移動が効率よく行える。よって、タレット1に手を加えることなく、省スペースで容易に工具ホルダ10の位置決めが可能となり、十分な調整代も確保できる。
特に、位置調整部17は、テコ部材19を上方に付勢してテコ部材19を収容部23の内面に当接させるコイルバネ21をさらに有し、操作ネジ22の移動操作によりテコ部材19を押圧することで、テコ部材19は、支点片27の下端を支点として変形を伴いながら回転する構成となっている。
よって、テコ部材19を傾動させる空間を大きく確保する必要がなくなり、テコ部材19を含む位置調整部17をより省スペースで工具ホルダ10に設けることができる。
特に、位置調整部17は、テコ部材19を上方に付勢してテコ部材19を収容部23の内面に当接させるコイルバネ21をさらに有し、操作ネジ22の移動操作によりテコ部材19を押圧することで、テコ部材19は、支点片27の下端を支点として変形を伴いながら回転する構成となっている。
よって、テコ部材19を傾動させる空間を大きく確保する必要がなくなり、テコ部材19を含む位置調整部17をより省スペースで工具ホルダ10に設けることができる。
各形態に共通して、ボルト及び操作ネジの位置は適宜変更できる。ボルト及び操作ネジの数も増減可能である。ボルトとテコ部材の上貫通孔との間に隙間がなくてもよい。ベース部材と取付面との間に隙間があってもよい。
ベース部材とテコ部材との間に配置されるコイルバネの数や位置も変更できる。他の弾性部材を用いてもよい。但し、形態6のようにベース部材は省略可能であるし、テコ部材の傾動が可能であれば、コイルバネ等の弾性部材も省略することができる。
被押圧部は、ボルトに代えてピン等の他の部材に変更してもよい。
また、各形態では、ボルトを下側から工具ホルダに結合して被押圧部とする例を示しているが、工具ホルダの上部からボルトやピン等を取り付けてその一部を収容部内に突出させ、当該突出部分をテコ部材が押圧可能な被押圧部とすることもできる。
さらに、ボルトやピン等の別部材を工具ホルダに取り付けて被押圧部を設ける構造に限らず、工具ホルダ自体に被押圧部となる部分を一体に形成してもよい。
操作部材は、操作ネジに限らない。例えば操作部材として楔部材を採用して工具ホルダの上面から押し込み操作することでテコ部材を押圧することもできる。操作部材の移動方向は、取付面と交差する方向であれば、取付面と直交する方向でなくてもよい。
工具ホルダを固定するホルダ保持装置は、タレットに限らない。
ベース部材とテコ部材との間に配置されるコイルバネの数や位置も変更できる。他の弾性部材を用いてもよい。但し、形態6のようにベース部材は省略可能であるし、テコ部材の傾動が可能であれば、コイルバネ等の弾性部材も省略することができる。
被押圧部は、ボルトに代えてピン等の他の部材に変更してもよい。
また、各形態では、ボルトを下側から工具ホルダに結合して被押圧部とする例を示しているが、工具ホルダの上部からボルトやピン等を取り付けてその一部を収容部内に突出させ、当該突出部分をテコ部材が押圧可能な被押圧部とすることもできる。
さらに、ボルトやピン等の別部材を工具ホルダに取り付けて被押圧部を設ける構造に限らず、工具ホルダ自体に被押圧部となる部分を一体に形成してもよい。
操作部材は、操作ネジに限らない。例えば操作部材として楔部材を採用して工具ホルダの上面から押し込み操作することでテコ部材を押圧することもできる。操作部材の移動方向は、取付面と交差する方向であれば、取付面と直交する方向でなくてもよい。
工具ホルダを固定するホルダ保持装置は、タレットに限らない。
1・・タレット、2・・取付面、3・・ネジ孔、4・・固定ボルト、10・・工具ホルダ、15,15A~15G・・位置決め機構、16・・基準ブロック、17・・位置調整部、18・・ベース部材、19・・テコ部材、20・・ボルト、21,38・・コイルバネ、22・・操作ネジ、23・・収容部、24・・下貫通孔、26・・上貫通孔、27・・支点片、28・・ストッパ片、29・・調整孔、35・・スプリングプランジャ、39・・ゴムスリーブ、40,41・・間座。
Claims (5)
- 工具を保持する工具ホルダを、ホルダ保持装置の取付面における所定の固定位置へ位置決めするための位置決め機構であって、
前記工具ホルダに設けられ、前記固定位置で前記ホルダ保持装置に当接可能な基準ブロックと、前記取付面に対する前記工具ホルダの位置を調整可能な位置調整部と、を有し、
前記位置調整部は、前記工具ホルダに設けられた被押圧部と、前記取付面と当接してその当接部位を支点として傾動可能に設けられ、当該傾動により前記被押圧部を押圧可能なテコ部材と、前記テコ部材に対して移動可能に設けられ、前記テコ部材への移動操作により前記テコ部材を押圧可能な操作部材と、を含み、
前記操作部材は、前記取付面との交差方向へ移動可能に設けられ、移動操作により前記テコ部材を押圧して前記取付面との当接部位を支点として傾動させることで、前記テコ部材を介して前記被押圧部を押圧し、前記工具ホルダを前記固定位置へ移動させることを特徴とする工具ホルダの位置決め機構。 - 前記位置調整部は、前記テコ部材を前記被押圧部と直接又は間接的に当接させた状態で保持する弾性部材をさらに有することを特徴とする請求項1に記載の工具ホルダの位置決め機構。
- 前記工具ホルダは、前記位置調整部を収容する収容部を有し、
前記位置調整部は、前記テコ部材を前記交差方向に付勢して前記テコ部材を前記収容部の内面に当接させる付勢手段をさらに有し、前記操作部材の移動操作により前記テコ部材を押圧することで、前記テコ部材は、前記取付面との当接部位を支点として変形を伴いながら傾動することを特徴とする請求項1に記載の工具ホルダの位置決め機構。 - 前記テコ部材は、前記工具ホルダが前記固定位置に達した際に前記ホルダ保持装置に当接するストッパを有し、前記基準ブロックと前記ストッパとで前記ホルダ保持装置を挟持して前記工具ホルダを前記固定位置に位置決めすることを特徴とする請求項1乃至3の何れかに記載の工具ホルダの位置決め機構。
- 前記被押圧部は、前記交差方向で前記テコ部材を貫通して前記工具ホルダにねじ込み結合されるボルトであり、前記テコ部材は、前記操作部材の押圧による傾動の際には、前記ボルトの貫通孔が前記ボルトを押圧して前記工具ホルダを移動させることを特徴とする請求項1乃至3の何れかに記載の工具ホルダの位置決め機構。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023179076A JP2025068942A (ja) | 2023-10-17 | 2023-10-17 | 工具ホルダの位置決め機構 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023179076A JP2025068942A (ja) | 2023-10-17 | 2023-10-17 | 工具ホルダの位置決め機構 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2025068942A true JP2025068942A (ja) | 2025-04-30 |
Family
ID=95517514
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023179076A Pending JP2025068942A (ja) | 2023-10-17 | 2023-10-17 | 工具ホルダの位置決め機構 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2025068942A (ja) |
-
2023
- 2023-10-17 JP JP2023179076A patent/JP2025068942A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1880786B1 (en) | Vise mechanism incorporated in cutting machine | |
| JP2011521795A (ja) | 工具ホルダ | |
| JP4838402B1 (ja) | ステージ機構 | |
| US11377767B2 (en) | Feed dog mounting/unmounting mechanism and sewing machine | |
| JP2001062658A (ja) | バイス装置 | |
| CN102791564B (zh) | 用于将板靠在机动车辆的固定元件的平的面上进行固定的装置 | |
| EP2889092A1 (en) | Intermediate-plate mounting device of press brake | |
| JP2025068942A (ja) | 工具ホルダの位置決め機構 | |
| TW202022882A (zh) | 工作臺機構 | |
| JP2003182613A (ja) | ラックピニオン式パワーステアリング装置 | |
| CN115107854A (zh) | 转向装置 | |
| JP7103002B2 (ja) | 切断機 | |
| JP7665144B2 (ja) | トルクレンチ | |
| JP2012116048A (ja) | 携帯用切断機 | |
| JP4574716B2 (ja) | 手動ステージ構成システム | |
| JP2000127054A (ja) | バイス | |
| JP7624779B1 (ja) | 送り機構 | |
| JP4343651B2 (ja) | カメラ取付ユニットの構造 | |
| KR101640749B1 (ko) | 모바일 모듈 및 이를 구비한 컨택 장치 | |
| CN101778988B (zh) | 滑动锁定装置 | |
| JP4870973B2 (ja) | 電動工具 | |
| WO2020174844A1 (ja) | ロボットハンド | |
| CN221012522U (zh) | 抽屉前面板固定机构和抽屉安装装置 | |
| JP5305019B2 (ja) | ワークサポート | |
| JP2002035863A (ja) | 穿孔、型押し等の加工装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20260428 |