JP3637655B2 - 自動変速機の変速制御装置 - Google Patents
自動変速機の変速制御装置 Download PDFInfo
- Publication number
- JP3637655B2 JP3637655B2 JP30135295A JP30135295A JP3637655B2 JP 3637655 B2 JP3637655 B2 JP 3637655B2 JP 30135295 A JP30135295 A JP 30135295A JP 30135295 A JP30135295 A JP 30135295A JP 3637655 B2 JP3637655 B2 JP 3637655B2
- Authority
- JP
- Japan
- Prior art keywords
- gear position
- position holding
- vehicle
- detecting means
- automatic transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/15—Road slope, i.e. the inclination of a road segment in the longitudinal direction
Landscapes
- Control Of Transmission Device (AREA)
Description
【発明の属する技術分野】
本発明は、車両に搭載した自動変速機の変速制御装置、特にアクセルペダルの戻し操作を行うときの変速制御装置に関するものである。
【0002】
【従来の技術】
自動変速機は、エンジンの運転負荷や、車速などの走行条件に応じて決定した好適変速段へ自動的に変速され、エンジンの運転負荷に関しては、これが小さくなるほど高速側のギヤ位置へアップシフト変速される傾向にある。
【0003】
従って、前方に他の車両が割り込んだ時や、障害物を回避するなどのために、エンジンの出力を加減するアクセルペダルを急に戻す操作を行った場合、自動変速機は高速側のギヤ位置へアップシフト変速される。この場合、エンジンブレーキが小さいことから、運転者は車両の空走感を感じて一瞬不安になることがある。
【0004】
この問題を解消するために従来、例えば特開昭61−249841号公報に記載のごとく、アクセルペダルの戻し速度が設定速度を越えるような操作があった時は、該操作の直前におけるギヤ位置を保持して高速側ギヤ位置へのアップシフト変速を禁じるようにした自動変速機の変速制御装置が提案された。かかる従来技術によれば、アクセルペダルの戻し速度が設定速度を越える時、自動変速機が、該アクセル戻し操作の直前におけるギヤ位置に保持されることから、エンジンブレーキが小さくなることがなく、従って運転者が空走感を感じて不安になるといった弊害を解消することができる。
【0005】
【発明が解決しようとする課題】
しかし、車両が登坂路を走行中であるにもかかわらず、上記従来技術のように、アクセルペダルの戻し速度が設定速度を越えたことに呼応して、自動変速機を、該アクセル戻し操作の直前におけるギヤ位置に保持する制御を実行すると、以下の問題が生ずることを確かめた。
【0006】
つまり、かかるギヤ位置保持制御によれば当然に、アクセル戻し操作時のエンジンブレーキが比較的大きくなり、登坂路走行中の車両を一瞬減速させる傾向となり、登坂路走行車両の運転性を大きく損なう。
【0007】
本発明は、アクセルペダルの戻し速度が設定速度を越えた時に、自動変速機を、当該アクセル戻し操作の直前におけるギヤ位置に保持するという制御を、登坂路走行中は行わせないようにする構成にすることで、上述の問題を解消することを目的とする。
【0008】
【課題を解決するための手段】
この目的のため、請求項1に記載した第1発明による自動変速機の変速制御装置は、
自動変速機を介して原動機の回転を車輪に伝達する車両において、
前記原動機の出力を加減するアクセルペダルの設定速度以上の急な戻し操作を検出するアクセル急減操作検出手段と、
該手段によりアクセルペダルの急な戻し操作が検出されるとき、自動変速機のギヤ位置を保持するギヤ位置保持手段と、
車両が登坂路走行中であるのを検知する登坂路走行検知手段と、
該手段により登坂路走行中が検知される間、前記ギヤ位置保持手段によるギヤ位置保持作用を禁止して、自動変速機の自動変速を許可するギヤ位置保持禁止手段とを具備する構成を特徴とするものである。
【0009】
かかる構成の第1発明によれば、アクセル急減操作検出手段によりアクセルペダルの急な戻し操作が検出されるとき、ギヤ位置保持手段は自動変速機のギヤ位置を保持する。よって当該アクセル急減操作時は、自動変速機が、この急なアクセル戻し操作直前におけるギヤ位置に保持されることとなり、アクセル戻し操作に呼応して自動変速機が高速側のギヤ位置にアップシフト変速されることがない。従って、急なアクセル戻し操作がなされた時も、自動変速機のアップシフト変速によってエンジンブレーキが小さくなることがなく、運転者が空走感を感じて不安になるといった弊害を解消することができる。
【0010】
ところで、登坂路走行検知手段により車両の登坂路走行中が検知される間は、ギヤ位置保持禁止手段が上記ギヤ位置保持手段によるギヤ位置保持作用を禁止して、自動変速機に通常通りの自動変速を行わせるようにする。よって、登坂路走行中においては、上記の急なアクセル戻し操作がなされても、自動変速機をこのアクセル戻し操作直前におけるギヤ位置に保持する制御がなされず、自動変速機はアクセル戻し操作に呼応して高速側のギヤ位置にアップシフト変速される。
【0011】
これがため、登坂路走行中のアクセル急減操作時に上記のギヤ位置保持制御がなされて大きなエンジンブレーキが作用し、登坂路走行中の車両を一瞬減速させるといったようなことがなくなり、登坂路走行車両の運転性が大きく損われるといった問題の発生を回避することができる。
【0012】
また、請求項2に記載した第2発明による自動変速機の変速制御装置は、上記の第1発明において、
前記登坂路走行検知手段に路面勾配を検出する路面勾配検出手段を設け、該登坂路走行検知手段は、これにより検出した路面勾配が設定勾配以上であるときに登坂路走行であることを検知するよう構成する。
【0013】
かかる構成の第2発明によれば、登坂路走行検知手段は、路面勾配検出手段により検出した路面勾配が設定勾配以上であるときに登坂路走行であることを検知する。
【0014】
この場合、路面勾配を周知のように傾斜角センサで検出したり、ナビゲーションシステムから路面傾斜情報を読み出して、直接的に得ることができるため、従って演算に頼る必要がないため、登坂路走行の検出を確実で、且つ安価に行うことができる。
【0015】
また、請求項3に記載した第3発明による自動変速機の変速制御装置は、上記の第2発明において、
前記ギヤ位置保持手段によるギヤ位置保持作用が行われているのを検知するギヤ位置保持作用検知手段と、
前記アクセルペダルの踏み込みを検知するアクセル踏み込み検知手段と、
前記車輪を制動するブレーキペダルの踏み込みを検知するブレーキ操作検知手段とを付加して設け、
更に、これら手段からの信号に応答し、前記アクセル急減操作検出手段がアクセルペダルの設定速度以上の急な戻し操作を検出した場合において、前記ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知され、且つ、アクセル踏み込み検知手段によりアクセルペダルの踏み込みが検知される時、前記設定勾配を減少させ、ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知されず、且つ、ブレーキ操作検知手段によりブレーキペダルの踏み込みが検知される時、前記設定勾配を増大させる設定勾配修正手段を設けたことを特徴とするものである。
【0016】
かかる構成の第3発明によれば、アクセル急減操作検出手段がアクセルペダルの設定速度以上の急な戻し操作を検出した場合において、設定勾配修正手段は以下のごとくに前記の設定勾配を修正する。
【0017】
つまり、ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知され、且つ、アクセル踏み込み検知手段によりアクセルペダルの踏み込みが検知される時、換言すれば、ギヤ位置保持作用が過大なエンジンブレーキをもたらし、アクセルペダルを踏み込まざるを得なかった場合、設定勾配修正手段は前記の設定勾配を減少させる。かかる設定勾配の減少は、一層小さな路面勾配からギヤ位置保持作用を禁止することとなり、ギヤ位置保持作用が上記過大なエンジンブレーキをもたらすような路面勾配のもとでは、当該ギヤ位置保持作用を確実に禁止して、アクセルペダルを踏み込まざるを得なくなるような事態の発生を回避することができる。
【0018】
また、ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知されず、且つ、ブレーキ操作検知手段によりブレーキペダルの踏み込みが検知される時、換言すれば、ギヤ位置保持作用が生起されないことによってエンジンブレーキが得られず、ブレーキペダルを踏み込まざるを得なかった場合、設定勾配修正手段は前記の設定勾配を増大させる。かかる設定勾配の増大は、路面勾配が一層大きくならないとギヤ位置保持作用を禁止しないこととなり、ギヤ位置保持作用の生起によりエンジンブレーキを発生させないと、ブレーキペダルを踏み込まざるを得なくなるような路面勾配のもとでは、当該ギヤ位置保持作用を確実に生起させて、ブレーキペダルを踏み込まざるを得なくなるような事態の発生を回避することができる。
【0019】
請求項4に記載した第4発明による自動変速機の変速制御装置は、上記の第2発明において、
アクセルペダルの戻し操作を検知するアクセル戻し操作検知手段と、
前記ギヤ位置保持手段によるギヤ位置保持作用が行われているのを検知するギヤ位置保持作用検知手段と、
前記車両の加速度を検出する車両加速度検出手段とを付加して設け、
更に、これら手段からの信号に応答し、アクセル戻し操作検知手段がアクセルペダルの戻し操作を検知した場合において、ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知され、且つ、車両加速度検出手段により検出した加速度が第1の設定加速度未満のエンジンブレーキ過大時、前記設定勾配を減少させ、ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知されず、且つ、車両加速度検出手段により検出した加速度が第2の設定加速度以上のエンジンブレーキ不足時、前記設定勾配を増大させる設定勾配修正手段を設けたことを特徴とするものである。
【0020】
かかる構成の第4発明によれば、アクセル戻し操作検知手段がアクセルペダルの戻し操作を検知した場合において、設定勾配修正手段は以下のごとくに前記の設定勾配を修正する。
【0021】
つまり、ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知され、且つ、車両加速度検出手段により検出した加速度が第1の設定加速度未満である時、換言すれば、ギヤ位置保持作用が過大なエンジンブレーキをもたらし、第1の設定加速度に対応した値より大きな車両減速度が発生した場合、設定勾配修正手段は前記の設定勾配を減少させる。かかる設定勾配の減少は、一層小さな路面勾配からギヤ位置保持作用を禁止することとなり、ギヤ位置保持作用を行うと第1の設定加速度に対応した値より大きな車両減速度が発生して、運転者がアクセルペダルを踏み込まざるを得なくなるような路面勾配のもとでは、当該ギヤ位置保持作用を確実に禁止して、アクセルペダルを踏み込まざるを得なくなるような事態の発生を回避することができる。
【0022】
また、ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知されず、且つ、車両加速度検出手段により検出した加速度が第2の設定加速度以上である時、換言すれば、ギヤ位置保持作用が生起されないことによってエンジンブレーキが得られず、第2の設定加速度に対応した値より大きな車両加速度が発生した場合、設定勾配修正手段は前記の設定勾配を増大させる。かかる設定勾配の増大は、路面勾配が一層大きくならないとギヤ位置保持作用を禁止しないこととなり、ギヤ位置保持作用の生起によりエンジンブレーキを発生させないと、第2の設定加速度に対応した値より大きな車両加速度が発生して、運転者がブレーキペダルを踏み込まざるを得なくなるような路面勾配のもとでは、当該ギヤ位置保持作用を確実に生起させて、ブレーキペダルを踏み込まざるを得なくなるような事態の発生を回避することができる。
【0023】
請求項5に記載した第5発明による自動変速機の変速制御装置によれば、上記の第4発明において、
前記設定勾配修正手段は、前記アクセル戻し操作検知手段がアクセルペダルの戻し操作を検知してから所定時間経過時における前記車両加速度検出手段の加速度検出値を前記第1および第2の設定加速度と比較するような構成とする。
【0024】
かかる構成の第5発明によれば、アクセルペダルの戻し操作があってから所定時間中に懸念されるイナーシャに原因した影響を排除して第4発明の作用を生起させることができ、第4発明の作用効果を一層確実に達成することが可能となる。
【0025】
請求項6に記載した第6発明による自動変速機の変速制御装置は、上記の第1乃至第5発明のいずれかにおいて、
道路が渋滞中であるか否かを検知する渋滞検知手段を付加して設け、
該手段により渋滞中が検知される時、登坂路走行中が検知されても、前記ギヤ位置保持手段によるギヤ位置保持作用が実行されるよう構成したものである。
【0026】
かかる構成の第6発明によれば、渋滞検知手段により道路の渋滞中が検知される時は、登坂路走行中であっても、前記ギヤ位置保持手段によるギヤ位置保持作用が実行される。
【0027】
よって、道路が渋滞中である時は、登坂路走行中であっても、アクセルペダルの急な戻し操作を行った場合、ギヤ位置保持作用がなされて、エンジンブレーキを発生させ得ることとなり、当該渋滞中においてブレーキペダル操作を頻繁に行う必要がなくなって、操作性が高まると共に、ブレーキの耐久性も向上させることができる。
【0028】
請求項7に記載した第7発明による自動変速機の変速制御装置は、上記の第1乃至第6発明のいずれかにおいて、
車両前方の車間距離を検出する車間距離検出手段を付加して設け、
該手段により検出された前方車間距離が安全車間距離未満である間、登坂路走行中が検知されても、前記ギヤ位置保持手段によるギヤ位置保持作用が実行されるよう構成したものである。
【0029】
かかる構成の第7発明によれば、車間距離検出手段により検出された前方車間距離が安全車間距離未満である間、登坂路走行中であっても、前記ギヤ位置保持手段によるギヤ位置保持作用が実行される。
【0030】
よって、前方車間距離が安全車間距離未満である間は、アクセルペダルの戻し操作を行った場合、登坂路走行中であっても、ギヤ位置保持作用がなされて、エンジンブレーキを発生させ得ることとなり、当該短い車間距離のもとでの走行中にブレーキペダル操作を頻繁に行う必要がなくて、操作性および安全性が高まると共に、ブレーキの耐久性も向上させることができる。
【0031】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づき詳細に説明する。
図1乃至図3は、本発明一実施の形態になる自動変速機の変速制御装置を示し、先ず、図1をもとに変速制御装置の構成を説明する。この図1において、1は自動変速機を示し、この自動変速機1は有段変速機とし、図示せざる車載エンジン(原動機)からの回転を選択ギヤ位置に応じ変速して、同じく図示せざる車輪に伝達するものとする。
【0032】
なお、自動変速機1の選択ギヤ位置は、周知の変速制御部2によりこれを決定し、この際自動変速機1は、変速制御部2からのギヤ位置指令を受けて、変速機内の変速油圧回路を介し選択ギヤ位置を、当該指令に対応したギヤ位置に向け切り換える自動変速を行うものとする。
【0033】
ここで変速制御部2は、エンジンのスロットル開度TVOを検出するスロットル開度センサ3からの信号、および車速VSPを検出する車速センサ4からの信号をそれぞれ入力され、以下のごとくに自動変速機1のギヤ位置を決定するものとする。つまり変速制御部2は、センサ3,4で検出したスロットル開度TVOおよび車速VSPから、予め設定してある変速マップを基に、車両運転状態にマッチした好適なギヤ位置を検索し、これをギヤ位置指令として自動変速機1に発する。
【0034】
本実施の形態においては、変速制御部2に接続してギヤ位置保持指令部5を設け、このギヤ位置保持指令部5は、上記エンジンの出力を加減すべく運転者が操作するアクセルペダルの急戻し時に、詳しくは後述するごとく、条件が満たされていれば、ギヤ位置保持指令を変速制御部2に発するためのもので、この指令を入力されるとき変速制御部2は、前記通常の変速制御に優先して当該指令を実行し、ギヤ位置を保持するものとする。
【0035】
ギヤ位置保持指令を発するべきか否かを決定するために、ギヤ位置保持指令部5には、前記スロットル開度センサ3および車速センサ4からの信号を入力する外に、自動変速機1の選択ギヤ位置iを検出するギヤ位置センサ6からの信号、スロットル開度変化速度演算部7からの信号、および登坂路走行検知部8からの信号をそれぞれ入力する。
【0036】
スロットル開度変化速度演算部7は、センサ3で検出したスロットル開度TVOの微小単位時間毎のスロットル開度変化量ΔTVOを求め、これをスロットル開度変化速度としてギヤ位置保持指令部5に入力するものとする。但し本例においては、アクセルペダルの戻し方向への操作にともなうスロットル開度変化量ΔTVOを正とする。従って、スロットル開度変化量ΔTVOはアクセル戻し速度を表すものとする。
【0037】
また登坂路走行検知部8は、車両に設置した周知の傾斜角センサで構成したり、或いはナビゲーションシステムの道路勾配情報を読み込むもの等、種々のものが考えられる。なお、勾配抵抗を次式、つまり勾配抵抗=駆動力−加速抵抗−空力抵抗−転がり抵抗の演算により求め、これから路面勾配を算出することも考えられる。ここで、上式における駆動力は、エンジンの性能線図をもとにスロットル開度TVOおよびエンジン回転数から容易に求めることができ、加速抵抗も、車速VSPの変化量および車両重量から計算により容易に求めることができ、空力抵抗および転がり抵抗はそれぞれ、車速VSPに応じた0%ロード・ロード線から容易に求めることができる。
【0038】
ギヤ位置保持指令部5は、上記入力情報を基に図2および図3のプログラムを実行して適宜、変速制御部2へギヤ位置保持指令を発するものとする。図2は、メインルーチンで、先ず、本発明における登坂路走行検知手段に対応したステップ11において、登坂路走行検知部8からの信号をもとに、登坂路走行中か否かを判別する。登坂路走行中でなければステップ12において、詳しくは図3の制御プログラムを実行することによりギヤ位置保持制御を行い、登坂路走行中であれば、本発明におけるギヤ位置保持禁止手段に相当するステップ13において、ステップ12におけるギヤ位置保持制御を禁止する。
【0039】
次に、図3に示すギヤ位置保持制御を説明するに、先ずステップ21において、車速VSPを読み込み、次のステップ22において、車速VSPが設定車速VSPS 以上か否かを判別する。ここで設定車速VSPS は、アクセルペダルの急戻しに伴うアップシフト変速によっても空走感を生ずることのない高車速域の下限値とし、例えば70km/hに定める。車速VSPが設定車速VSPS 未満で、アクセルペダルの急戻しを行うと、これに伴うアップシフト変速によって空走感を生ずる場合においては、制御を本発明におけるアクセル急減操作検出手段に対応したステップ23に進め、ここで、上記の空走感を生ずるようなアクセルペダルの急戻しを行ったか否かを、アクセル戻し速度ΔTVOが設定速度ΔTVOS 以上か否かにより判別する。
【0040】
アクセルペダルの急戻しを行ったと判別する場合、ステップ24において、選択中のギヤ位置iが最高速段か否かをチェックする。最高速段であれば、それ以上のアップシフト変速が存在しないから、アップシフト変速を行わせないようにして上記の空走感を防止するギヤ位置保持制御は意味がない。従って、ステップ24でギヤ位置iが最高速段でないと判別する場合に、制御をステップ25に進め、ここでスロットル開度TVOが0(アクセルペダル釈放)と判別する時に、本発明におけるギヤ位置保持手段に対応したステップ26で、ギヤ位置保持指令を変速制御部2に出力すると共に、このことを表すようにフラグFLAGを1にセットする。
【0041】
ギヤ位置保持指令を受けると変速制御部2は、前記した通常の変速制御に関係なく、現在の自動変速機1のギヤ位置を保持する。以上により、車速VSPが設定車速VSPS 未満であるときにアクセルペダルの急戻し(ΔTVO≧ΔTVOS )を行ってスロットル開度TVOを全閉にした時は、自動変速機1がアクセル戻し操作直前におけるギヤ位置に保持されることとなり、上記アクセルペダルの戻しに呼応したアップシフト変速を行うことがない。従って、当該アクセルペダルの戻し操作に呼応したアップシフト変速で、運転者が空走感を感じて不安になるといった弊害を解消することができる。
【0042】
ステップ23で、前記アクセルペダルの急戻しを検出しなくなった場合や、またステップ24において、ギヤ位置iが最高速段であると判別した場合や、更にステップ25で、スロットル開度TVOが0(アクセルペダル釈放)でないと判別した場合は、ステップ27で、車速VSPが0以外の走行中であると判別し、且つ、ステップ28で、スロットル開度TVOが減速意思を示す設定値TVOS 未満であると判別する時、制御をステップ29,30に進めて、以下のごとくにギヤ位置保持制御を実行する。つまりステップ29において、フラグFLAGから前回はギヤ位置保持状態だったか否かを判別し、ギヤ位置保持状態だった場合はステップ30で、引き続きギヤ位置保持指令を出力し、ギヤ位置保持状態でなかった場合は、制御をそのまま終了する。従って、ギヤ位置保持制御を前回の状態のままに保つ。
【0043】
ステップ22で、車速VSPが設定車速VSPS 以上であると判別する場合や、ステップ28で、スロットル開度TVOが減速意思を示す設定値TVOS 未満でないと判別する場合は、制御をステップ31,32に進める。ステップ31でフラグFLAGが1のあると判別する場合、つまり前回がギヤ位置保持状態であったと判別する場合、ステップ32において、変速制御部2へのギヤ位置保持指令を解除すると共に、このことを表すようにフラグFLAGを0にリセットする。ステップ31でフラグFLAGが0のあると判別する場合、制御をそのまま終了し、いずれにしても、ギヤ位置保持作用を終了させる。
【0044】
ところで図2に示すように、ステップ11で登坂路走行中であると判別する場合は、ステップ13において、ステップ12における上記のギヤ位置保持制御を禁止したから、自動変速機1のギヤ位置を変速制御部2による通常の変速制御に任せることとなる。よって登坂路走行中においては、上記の急なアクセル戻し操作がなされても、自動変速機1をこのアクセル戻し操作直前におけるギヤ位置に保持する制御がなされず、自動変速機はアクセル戻し操作に呼応して高速側のギヤ位置にアップシフト変速され得る。
【0045】
これがため、登坂路走行中のアクセル急減操作時に前記のギヤ位置保持制御がなされて大きなエンジンブレーキが作用し、登坂路走行中の車両を一瞬減速させるといったようなことがなくなり、登坂路走行車両の運転性が大きく損われるという問題の発生を回避することができる。
【0046】
図4は、本発明による変速制御装置の他の実施の形態を示し、本実施の形態においては、登坂路走行検知部8が、図1につき前述したもののうち、特に路面勾配θを検出してギヤ位置保持指令部5に入力するものとする。従って、登坂路走行検知部8は本発明における路面勾配検出手段に相当する。またギヤ位置保持指令部5には、図1における入力情報に付加して、ブレーキスイッチ91からの信号を入力するものとし、このブレーキスイッチ91は、ブレーキペダルを踏み込む車両制動時にONとなるようなものでよい。
【0047】
本実施の形態においては、ギヤ位置保持指令部5は図5のプログラムを実行してギヤ位置保持制御を行う。図5の制御プログラムは、図2のステップ11をステップ14に置換したもので、先ずステップ14において、路面勾配θが設定勾配θS 以上か否かにより、登坂路走行中か否かを判別する。登坂路走行中でない場合、ステップ12において、図2におけると同様にして、即ち、詳しくは図3に示す処理によりギヤ位置保持制御を行う。
【0048】
しかし、ステップ14において登坂路走行中であると判別する場合、ステップ13において、図2におけると同様に上記のギヤ位置保持制御を禁止し、自動変速機の通常通りの自動変速を許可する。
【0049】
よって、本実施の形態においても、登坂路走行中でなければ図3に示すように、車速VSPが設定車速VSPS 未満であるときにアクセルペダルの急戻し(ΔTVO≧ΔTVOS )を行ってスロットル開度TVOを全閉にした時は、自動変速機1がアクセル戻し操作直前におけるギヤ位置に保持されることとなり、上記アクセルペダルの戻しに呼応したアップシフト変速が生起されることがない。従って、当該アクセルペダルの戻し操作に呼応したアップシフト変速で、運転者が空走感を感じて不安になるといった弊害を解消することができる。これに対し登坂路走行中である場合は、上記のギヤ位置保持制御を禁止し、自動変速機1のギヤ位置を変速制御部2による通常の変速制御に任せることから、上記の急なアクセル戻し操作がなされても、自動変速機1をこのアクセル戻し操作直前におけるギヤ位置に保持する制御がなされず、自動変速機はアクセル戻し操作に呼応して高速側のギヤ位置にアップシフト変速される。これがため、登坂路走行中のアクセル急減操作時に前記のギヤ位置保持制御がなされて大きなエンジンブレーキが作用し、登坂路走行中の車両を一瞬減速させるといったようなことがなくなり、登坂路走行車両の運転性が大きく損われるという問題の発生を回避することができる。
【0050】
ところで、本実施の形態においては更に、ギヤ位置保持指令部5が上記の設定勾配θS を、図6のプログラムにより学習制御するようになす。図6においては、先ずステップ41で、路面勾配θが設定勾配θS 以上か否かにより、登坂路走行中か否かを判別し、ステップ42で、アクセル戻し速度ΔTVOが、図3につき前記した設定速度ΔTVOS 以上か否かにより、アクセルペダルの急戻しを行ったか否かを判別する。
【0051】
これらステップ41,42において、登坂路走行中で、且つ、アクセルペダルの急戻しを行ったと判別する場合、ステップ43において、当該判別からの経過時間を測定するためにタイマTMを起動し、このタイマTMが例えば3秒の設定時間TMS を計測するまでの間に、制御をステップ45に進める。ステップ45では、図4のギヤ位置保持指令部5から変速制御部2へギヤ位置保持指令が出力されているか否かにより、ギヤ位置保持作用中か否かを判別する。よってステップ45は、本発明におけるギヤ位置保持作用検知手段に相当する。
【0052】
かかるステップ45の判別結果に応じ、設定勾配θS の学習制御による修正が以下のごとくに行われる。つまり、ステップ45でギヤ位置保持作用中であると判別し、且つ、本発明におけるアクセル踏み込み検知手段を成すステップ46で、スロットル開度TVOの検出値から、アクセルペダルが踏み込まれた加速中であると判別する場合、換言すれば、上記のギヤ位置保持作用が過大なエンジンブレーキをもたらし、アクセルペダルを踏み込まざるを得なかった場合、本発明における設定勾配修正手段に相当するステップ47において、設定勾配θS を所定値ΔθS だけ減少させた後、ステップ48においてタイマTMを0にリセットする。
【0053】
かかる設定勾配の減少は、一層小さな路面勾配θからギヤ位置保持作用を禁止することとなり、よってギヤ位置保持作用が上記過大なエンジンブレーキをもたらして、運転者がアクセルペダルを踏み込まざるを得なくなるような路面勾配のもとでは、当該ギヤ位置保持作用を確実に禁止して、アクセルペダルを踏み込まざるを得なくなるような事態の発生を回避することができる。
【0054】
勿論、ステップ46でアクセルペダルが踏み込まれていないと判別する場合は、設定勾配θS が適切なものであることから、その修正を行わずに、制御をそのまま終了する。
【0055】
また、ステップ45でギヤ位置保持作用中でないと判別し、且つ、本発明におけるブレーキ操作検知手段を成すステップ49で、図4におけるブレーキスイッチ91のONが検出される車両制動中である場合、換言すれば、ギヤ位置保持作用が生起されないことによってエンジンブレーキが得られず、ブレーキペダルを踏み込まざるを得なかった場合、本発明における設定勾配修正手段に相当するステップ50において、設定勾配θS を所定値ΔθS だけ増大させた後、ステップ48においてタイマTMを0にリセットする。
【0056】
かかる設定勾配の増大は、路面勾配が一層大きくならないとギヤ位置保持作用を禁止しないこととなり、ギヤ位置保持作用の生起によりエンジンブレーキを発生させないと、ブレーキペダルを踏み込まざるを得なくなるような路面勾配のもとでは、当該ギヤ位置保持作用を確実に生起させて、ブレーキペダルを踏み込まざるを得なくなるような事態の発生を回避することができる。
【0057】
勿論、ステップ49でブレーキペダルが踏み込まれていないと判別する場合は、設定勾配θS が適切なものであることから、その修正を行わずに、制御をそのまま終了する。
【0058】
以上のような設定勾配θS の学習制御は、ステップ44でタイマTMが設定時間TMS 以上を示すようになったと判別する時に、つまり、ステップ41,42において、登坂路走行中で、且つ、アクセルペダルの急戻しがあったと判別してから、設定時間TMS が経過した後は、学習制御の正確を期するために終了させる。
【0059】
また、ステップ41で登坂路走行中でないと判別した場合や、ステップ42でアクセルペダルの急な戻し操作が検出されない場合は、当然、設定勾配θS の学習制御は行う必要がないから、制御をそのまま終了することとする。
【0060】
図7は、本発明による変速制御装置の更に他の実施の形態を示し、本実施の形態においては、登坂路走行検知部8が、図4につき前述したと同様に、路面勾配θを検出してギヤ位置保持指令部5に入力するものとする。また、ギヤ位置保持指令部5には、図4におけるブレーキスイッチ91に代えて、車両の加速度Gを検出する加速度センサ92からの信号を入力するものとする。
【0061】
本実施の形態においても、ギヤ位置保持指令部5は図4の場合と同様に、図5および図3のプログラムを実行してギヤ位置保持制御を行う。つまり、図5のステップ14において、路面勾配θが設定勾配θS 未満で、登坂路走行中でないと判別した場合は、ステップ12において、詳しくは図3に示す処理によりギヤ位置保持制御を行い、車速VSPが設定車速VSPS 未満であるときにアクセルペダルの急戻し(ΔTVO≧ΔTVOS )を行ってスロットル開度TVOを全閉にした時、自動変速機1をアクセル戻し操作直前におけるギヤ位置に保持して、アクセルペダルの戻しに呼応したアップシフト変速を禁じることで、運転者が空走感を感じて不安になるといった弊害を解消する。これに対し図5のステップ14において、登坂路走行中であると判別する場合は、ステップ13において上記のギヤ位置保持制御を禁止し、自動変速機1のギヤ位置を変速制御部2による通常の変速制御に任せることから、自動変速機はアクセル戻し操作に呼応して高速側のギヤ位置にアップシフト変速されることとなり、登坂路走行中のアクセル急減操作時に前記のギヤ位置保持制御がなされて大きなエンジンブレーキが作用し、車両を一瞬減速させるといったようなことがなくなる。
【0062】
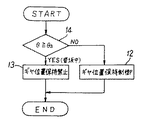
ところで、本実施の形態においては、ギヤ位置保持指令部5が上記の設定勾配θS を学習制御するに際し、図6に代えて図8のプログラムによりこれを行うようになす。図8においては、先ず本発明におけるアクセル戻し操作検知手段に相当するステップ61で、前記のΔTVOをもとにアクセルペダルの戻し操作があったか否かをチェックする。アクセルペダルの戻し操作がなければ、設定勾配θS の学習制御は不要であるから、制御をそのまま終了するが、アクセルペダルの戻し操作があった場合、設定勾配θS の学習制御を以下のごとくに行う。
【0063】
つまり先ず、本発明における車両加速度検出手段に相当するステップ62において、アクセルペダルの戻し操作があってから、イナーシャによる影響がなくなる、例えば1秒のような設定時間Δtが経過した時の車両加速度Gを、図7のセンサ92から読み込む。そして、本発明におけるギヤ位置保持作用検知手段に相当するステップ63で、図7のギヤ位置保持指令部5から変速制御部2へギヤ位置保持指令が出力されているか否かにより、ギヤ位置保持作用中か否かを判別する。
【0064】
ステップ63でギヤ位置保持作用中であると判別し、且つ、ステップ64で車両加速度Gが第1の設定加速度G1 未満であると判別する場合、換言すれば、上記のギヤ位置保持作用が過大なエンジンブレーキをもたらし、第1の設定加速度G1 に対応した値よりも大きな車両減速度が発生した場合、本発明における設定勾配修正手段に対応したステップ65において、設定勾配θS を所定値ΔθS だけ減少させる。
【0065】
かかる設定勾配の減少は、一層小さな路面勾配θからギヤ位置保持作用を禁止することとなり、ギヤ位置保持作用が上記第1の設定加速度G1 に対応した値より大きな車両減速度を発生させて、運転者がアクセルペダルを踏み込まざるを得なくなるような路面勾配のもとでは、当該ギヤ位置保持作用を確実に禁止して、アクセルペダルを踏み込まざるを得なくなるような事態の発生を回避することができる。
【0066】
勿論、ステップ64で車両加速度Gが第1の設定加速度G1 未満ではないと判別する場合は、設定勾配θS が適切なものであることから、その修正を行わずに、制御をそのまま終了する。
【0067】
また、ステップ63でギヤ位置保持作用中でないと判別し、且つ、ステップ66で車両加速度Gが第2の設定加速度G2 以上であると判別する場合、換言すれば、ギヤ位置保持作用が生起されないことによってエンジンブレーキが不足して、第2の設定加速度G2 に対応した値より大きな車両加速度が発生した場合、本発明における設定勾配修正手段に相当するステップ67において、設定勾配θS を所定値ΔθS だけ増大させる。
【0068】
かかる設定勾配の増大は、路面勾配が一層大きくならないとギヤ位置保持作用を禁止しないこととなり、ギヤ位置保持作用の生起によりエンジンブレーキを発生させないと、第2の設定加速度G2 に対応した値より大きな車両加速度が発生して、運転者がブレーキペダルを踏み込まざるを得なくなるような路面勾配のもとでは、当該ギヤ位置保持作用を確実に生起させて、ブレーキペダルを踏み込まざるを得なくなるような事態の発生を回避することができる。
【0069】
勿論、ステップ66で車両加速度Gが第2の設定加速度G2 以上でないと判別する場合は、設定勾配θS が適切なものであることから、その修正を行わずに、制御をそのまま終了する。
【0070】
以上のような図8に示す設定勾配θS の学習制御によっても、図6につき前述した設定勾配θS の学習制御によると同様の作用効果を達成することができる。
【0071】
図9は、本発明による変速制御装置の更に他の実施の形態を示し、本実施の形態においては、図1に付加して渋滞検知部93を設け、これによる検知結果をもギヤ位置保持指令部5に入力するものとする。なお渋滞検知部93としては、ナビゲーションシステムや、FM多重放送からの渋滞情報を判定し、判定結果をギヤ位置保持指令部5に入力するものが考えられる。
【0072】
本実施の形態においてギヤ位置保持指令部5は、図2に対応した図10のプログラムを実行してギヤ位置保持制御を行うものとする。つまり、本発明における渋滞検知手段を成す図10のステップ15において、渋滞検知部93からの信号をもとに走行中の道路が渋滞中であるか否かを判別し、渋滞中でなければ制御をステップ11に進めて、図2につき前述したと同様にギヤ位置保持制御の実行(ステップ12)、および当該ギヤ位置保持制御の禁止(ステップ13)を行うものとする。
【0073】
ところで、ステップ15において走行道路が渋滞中であると判別する場合は、ステップ11の判別結果に関係なく、つまり登坂路走行中であっても、制御をステップ12に進めることにより、ギヤ位置保持制御を禁止せずに実行させることとする。
【0074】
ここで渋滞時においては、アクセルペダルを釈放すると同時に、ブレーキペダルの踏み込みにより車両を制動する頻度が高いが、この時前記したギヤ位置保持作用により、アクセルペダルの戻し操作に呼応したアップシフトがなされないようにすることで、エンジンブレーキを有効に活用して、ブレーキペダルの踏み込み頻度を減ずることができ、運転性を向上させ得るのみならず、ブレーキ装置の耐久性をも向上させることができる。
【0075】
図11は、本発明による変速制御装置の更に他の実施の形態を示し、本実施の形態においては、図1に付加して車間距離検出部94を設け、これにより検出した車間距離Lに係わる信号をもギヤ位置保持指令部5に入力するものとする。なお車間距離検出部94としては、レーダ波や超音波を発射し、反射波を受信するまでの時間から車間距離Lを計測したり、カメラで撮影した画像を用いて前方走行車両までの車間距離Lを算出する型式のものでよい。
【0076】
本実施の形態においてギヤ位置保持指令部5は、図2に対応した図12のプログラムを実行してギヤ位置保持制御を行うものとする。つまり、本発明における車間距離検出手段を成す図12のステップ16において、車間距離検出部94からの信号をもとに車間距離Lが、図13のように車速VSPごとに予め設定してある安全車間距離LS 未満であるか、以上であるかを判別し、安全車間距離LS 以上であれば制御をステップ11に進めて、図2につき前述したと同様にギヤ位置保持制御の実行(ステップ12)、および当該ギヤ位置保持制御の禁止(ステップ13)を行うものとする。
【0077】
ところで、ステップ16において車間距離Lが安全車間距離LS 未満であると判別する場合は、ステップ11の判別結果に関係なく、つまり登坂路走行中であっても、制御をステップ12に進めることにより、ギヤ位置保持制御を禁止せずに実行させることとする。
【0078】
ここで車間距離Lが安全車間距離LS 未満である場合においては、アクセルペダルを釈放して、ブレーキペダルの踏み込みにより車両を制動する時に、十分な制動力が要求されるが、この時前記したギヤ位置保持作用により、アクセルペダルの戻し操作に呼応したアップシフトがなされないようにすることで、エンジンブレーキを有効に活用して、十分な制動力を要求通りに発生させることができ、運転性および安全性を向上させることができる。
【図面の簡単な説明】
【図1】本発明一実施の形態になる自動変速機の変速制御装置を示す機能別ブロック線図である。
【図2】同変速制御装置による変速制御のメインルーチンを示すフローチャートである。
【図3】同メインルーチンにおけるギヤ位置保持制御に関したサブルーチンを示すフローチャートである。
【図4】本発明による他の実施の形態になる自動変速機の変速制御装置を示す機能別ブロック線図である。
【図5】同変速制御装置による変速制御のメインルーチンを示すフローチャートである。
【図6】同変速制御において登坂路走行か否かを判定するに用いた設定路面勾配の学習制御プログラムを示すフローチャートである。
【図7】本発明による更に他の実施の形態になる自動変速機の変速制御装置を示す機能別ブロック線図である。
【図8】同変速制御装置において登坂路走行か否かを判定するに用いた設定路面勾配の学習制御プログラムを示すフローチャートである。
【図9】本発明による更に他の実施の形態になる自動変速機の変速制御装置を示す機能別ブロック線図である。
【図10】同変速制御装置による変速制御のメインルーチンを示すフローチャートである。
【図11】本発明による更に他の実施の形態になる自動変速機の変速制御装置を示す機能別ブロック線図である。
【図12】同変速制御装置による変速制御のメインルーチンを示すフローチャートである。
【図13】車速ごとの安全車間距離を示す線図である。
【符号の説明】
1 自動変速機
2 変速制御部
3 スロットル開度センサ
4 車速センサ
5 ギヤ位置保持指令部
6 ギヤ位置センサ
7 スロットル開度変化速度演算部
8 登坂路走行検知部
91 ブレーキスイッチ
92 加速度センサ
93 渋滞検知部
94 車間距離検出部
Claims (7)
- 自動変速機を介して原動機の回転を車輪に伝達する車両において、
前記原動機の出力を加減するアクセルペダルの設定速度以上の急な戻し操作を検出するアクセル急減操作検出手段と、
該手段によりアクセルペダルの急な戻し操作が検出されるとき、自動変速機のギヤ位置を保持するギヤ位置保持手段と、
車両が登坂路走行中であるのを検知する登坂路走行検知手段と、
該手段により登坂路走行中が検知される間、前記ギヤ位置保持手段によるギヤ位置保持作用を禁止して、自動変速機の自動変速を許可するギヤ位置保持禁止手段とを具備してなることを特徴とする自動変速機の変速制御装置。 - 請求項1において、前記登坂路走行検知手段は路面勾配を検出する路面勾配検出手段を具え、該検出した路面勾配が設定勾配以上であるときに登坂路走行であることを検知するよう構成したことを特徴とする自動変速機の変速制御装置。
- 請求項2において、前記ギヤ位置保持手段によるギヤ位置保持作用が行われているのを検知するギヤ位置保持作用検知手段と、
前記アクセルペダルの踏み込みを検知するアクセル踏み込み検知手段と、
前記車輪を制動するブレーキペダルの踏み込みを検知するブレーキ操作検知手段とを付加して設け、
更に、これら手段からの信号に応答し、前記アクセル急減操作検出手段がアクセルペダルの設定速度以上の急な戻し操作を検出した場合において、前記ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知され、且つ、アクセル踏み込み検知手段によりアクセルペダルの踏み込みが検知される時、前記設定勾配を減少させ、ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知されず、且つ、ブレーキ操作検知手段によりブレーキペダルの踏み込みが検知される時、前記設定勾配を増大させる設定勾配修正手段を設けたことを特徴とする自動変速機の変速制御装置。 - 請求項2において、前記アクセルペダルの戻し操作を検知するアクセル戻し操作検知手段と、
前記ギヤ位置保持手段によるギヤ位置保持作用が行われているのを検知するギヤ位置保持作用検知手段と、
前記車両の加速度を検出する車両加速度検出手段とを付加して設け、
更に、これら手段からの信号に応答し、アクセル戻し操作検知手段がアクセルペダルの戻し操作を検知した場合において、ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知され、且つ、車両加速度検出手段により検出した加速度が第1の設定加速度未満のエンジンブレーキ過大時、前記設定勾配を減少させ、ギヤ位置保持作用検知手段によりギヤ位置保持作用中が検知されず、且つ、車両加速度検出手段により検出した加速度が第2の設定加速度以上のエンジンブレーキ不足時、前記設定勾配を増大させる設定勾配修正手段を設けたことを特徴とする自動変速機の変速制御装置。 - 請求項4において、前記設定勾配修正手段は、前記アクセル戻し操作検知手段がアクセルペダルの戻し操作を検知してから所定時間経過時における前記車両加速度検出手段の加速度検出値を前記第1および第2の設定加速度と比較するよう構成したことを特徴とする自動変速機の変速制御装置。
- 請求項1乃至5のいずれか1項において、道路が渋滞中であるか否かを検知する渋滞検知手段を付加して設け、
該手段により渋滞中が検知される時、登坂路走行中が検知されても、前記ギヤ位置保持手段によるギヤ位置保持作用が実行されるよう構成したことを特徴とする自動変速機の変速制御装置。 - 請求項1乃至6のいずれか1項において、車両前方の車間距離を検出する車間距離検出手段を付加して設け、
該手段により検出された前方車間距離が安全車間距離未満である間、登坂路走行中が検知されても、前記ギヤ位置保持手段によるギヤ位置保持作用が実行されるよう構成したことを特徴とする自動変速機の変速制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP30135295A JP3637655B2 (ja) | 1995-11-20 | 1995-11-20 | 自動変速機の変速制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP30135295A JP3637655B2 (ja) | 1995-11-20 | 1995-11-20 | 自動変速機の変速制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH09144874A JPH09144874A (ja) | 1997-06-03 |
| JP3637655B2 true JP3637655B2 (ja) | 2005-04-13 |
Family
ID=17895838
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP30135295A Expired - Fee Related JP3637655B2 (ja) | 1995-11-20 | 1995-11-20 | 自動変速機の変速制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3637655B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100660301B1 (ko) * | 2000-08-24 | 2006-12-21 | 아이신에이더블류 가부시키가이샤 | 자동변속기의 제어장치 |
| JP4627142B2 (ja) * | 2003-12-03 | 2011-02-09 | 富士通テン株式会社 | 衝突予防制御装置 |
| JP4797573B2 (ja) * | 2005-10-26 | 2011-10-19 | トヨタ自動車株式会社 | 車両用自動変速機の変速制御装置 |
| JP4840029B2 (ja) * | 2006-08-29 | 2011-12-21 | トヨタ自動車株式会社 | 車両の制御装置 |
| CN102128258A (zh) * | 2011-03-21 | 2011-07-20 | 重庆长安汽车股份有限公司 | 一种at变速器急松油门换档控制方法 |
| CN112413108A (zh) * | 2020-10-19 | 2021-02-26 | 东风汽车集团有限公司 | 基于自动变速箱的换挡控制方法、装置、系统及存储介质 |
| CN115419707B (zh) * | 2022-08-30 | 2023-07-25 | 长城汽车股份有限公司 | 一种变速箱升挡的控制方法、装置、车辆以及存储介质 |
-
1995
- 1995-11-20 JP JP30135295A patent/JP3637655B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH09144874A (ja) | 1997-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0941903B1 (en) | Automatic brake control system | |
| JP6776968B2 (ja) | 走行制御装置、車両および走行制御方法 | |
| US20130060434A1 (en) | Vehicle gear-shifting control apparatus | |
| JP2011064330A (ja) | 自発的な燃料/ペダルオフ時の自動車の自動変速機を制御する方法 | |
| JP3446429B2 (ja) | 自動変速機の変速制御装置 | |
| JP3637655B2 (ja) | 自動変速機の変速制御装置 | |
| EP3597967B1 (en) | Gearbox control device for vehicle | |
| JP3438630B2 (ja) | 車両用走行制御装置 | |
| KR100222151B1 (ko) | 차량용 구동력 제어 장치 | |
| US20070034440A1 (en) | Method and device for preventing unintended acceleration of a vehicle | |
| KR100898882B1 (ko) | 자동차 제어 장치 | |
| JPH10269495A (ja) | 車両の走行補助装置 | |
| JP2940174B2 (ja) | 車両用走行制御装置 | |
| JP3375270B2 (ja) | 車間距離制御装置 | |
| JP2005306179A (ja) | 車両の制御装置 | |
| JP3487988B2 (ja) | 自動変速機の変速制御装置 | |
| JP3084968B2 (ja) | 車両用走行制御装置 | |
| JP7276177B2 (ja) | 運転支援装置、車両、及び運転支援方法 | |
| JP3623368B2 (ja) | 車両の変速装置 | |
| JP3849380B2 (ja) | 車間制御装置及び記録媒体 | |
| JPH11280880A (ja) | 車両の駆動力制御装置 | |
| JPH11278097A (ja) | 車両用走行制御装置 | |
| JPH11229917A (ja) | 車両制御装置 | |
| JPH0692223B2 (ja) | 自動車の車輪スリップ制御装置 | |
| JPH08118996A (ja) | 車両の速度制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040906 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040921 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041221 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050103 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080121 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090121 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |