JP3641945B2 - 配光制御システム - Google Patents
配光制御システム Download PDFInfo
- Publication number
- JP3641945B2 JP3641945B2 JP23938198A JP23938198A JP3641945B2 JP 3641945 B2 JP3641945 B2 JP 3641945B2 JP 23938198 A JP23938198 A JP 23938198A JP 23938198 A JP23938198 A JP 23938198A JP 3641945 B2 JP3641945 B2 JP 3641945B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- light distribution
- distribution control
- information
- intersection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






































Landscapes
- Lighting Device Outwards From Vehicle And Optical Signal (AREA)
Description
【0001】
【発明の属する技術分野】
この発明は、車両に設けられて、車両の外部を照射する配光制御システムに関するものである。
【0002】
【従来の技術】
従来、車両の外部照明装置としては、ヘッドランプやフォグランプなど主として車両に対して前方方向を照射し夜間走行時の前方視認性を確保するものや、コーナリングランプのように車両が旋回するときに、車両の側方を照射し、側方視認性を確保するものがある。また、ヘッドランプなどは、対向車や先行車が存在した場合に走行ビームとすれ違いビームとを切り替えることにより、対向車や先行車に幻惑を与えないようにすることができるようになっている。
【0003】
また、最近では光軸や配光パターンを変更することで自車の存在を他車に知らしめるような技術も公開されつつある。
例えば、特開平5−4546(特願平3−157013)号公報に示すように、優先道路を走行中の車両が非優先道路を走行中の車両を認識すると照射距離を長くし、非優先道路側を走行する車両の照射距離を短くするように配光を制御する技術がある。
【0004】
【発明が解決しようとする課題】
しかしながら、上述の特開平3−157013号公報にあるような技術では他車に自車を認識させやすくするために配光を制御するわけであり、前照灯本来の使用目的である視認性の向上には供していないという問題点があった。
本発明は上記のことを鑑み、自車以外の車両の外部照明装置 の配光が制御可能な状態にある場合、自車の前照灯類によって照射することのできない範囲を補完的に他車の外部照明装置を用いて照射をし、自車の視認範囲拡大を行うことを目的としている。
【0005】
【課題を解決するための手段】
上記目的を達成するために、本発明の配光制御システムは、配光制御を指令する自車と、配光制御を指令される他車と、に設けられた配光制御システムであって、前記配光制御を指令する自車が、車両位置検出手段と走行状態検出手段と道路情報検出手段と演算手段と車両同士が情報を相互に交換するための情報交換手段とを備え、前記車両位置検出手段と走行状態検出手段と道路情報検出手段とによって得られた各種情報を前記演算手段によって処理し、その結果得られた情報を前記配光制御を指令される他車へ情報を送信し、前記配光制御を指令される他車が、車両位置検出手段と走行状態検出手段と道路情報検出手段と演算手段と車両同士が情報を相互に交換するための情報交換手段と搭乗者の視認に供しない外部照明装置と外部照明装置をコントロールするための制御装置とを備え、前記車両位置検出手段と走行状態検出手段と道路情報検出手段とによって得られた各種情報と配光制御を指令する自車から送信されてきた情報とを前記演算手段によって処理し、その情報をもとに前記制御装置を作動させ、前記外部照明装置の配光を制御する。
【0006】
さらに、前記配光制御システムは、システムの稼働を判断する処理と、配光制御処理の継続を判断する処理と、配光制御を指令する自車の周囲に存在する他車を検出する処理と、配光を制御させる車両を決定する処理と、その配光を制御させる車両に備えられた外部照明装置の配光を制御する処理と、を備えている。
【0007】
さらに、前記システムの稼働を判断する処理は、前記配光制御を指令する自車の走行状態検出手段によって自車の走行状態を検出し、自車が走行状態でなければ処理を終了し、自車が走行状態であれば配光制御の可・不可判断を行い、配光制御が可能な状態であれば配光制御処理を行う。
【0008】
さらに、前記自車の走行状態検出手段は、前記自車のエンジンが起動しているかどうかを検出してエンジンが起動されていれば走行状態と判断し、エンジンが起動されていなければ非走行状態と判断する。
【0009】
さらに、前記配光制御の可・不可判断は、この配光制御の可・不可判断に備えられた配光制御モードのスイッチの状態を検知して、スイッチがオンの状態であれば配光制御可と判断し、スイッチがオフの状態であれば配光制御不可と判断する。
【0010】
さらに、前記配光制御処理の継続を判断する処理は、前記配光制御を指令する自車の車両位置検出手段によって自車の車両位置を検出する処理と、得られた自車の車両位置をもとに道路情報検出手段によって走行道路形態を検出する処理と、を備え、得られた走行道路の形態に応じて配光制御の処理を継続するかどうかを判断する。
【0011】
さらに、前記車両位置検出手段は、GPSからの信号を受信する手段を備え、受信されたGPS信号から受信位置の緯度経度を抽出し、抽出された緯度経度情報を車両の位置とする。
【0012】
さらに、前記道路情報検出手段によって走行道路形態を検出する処理は、車両の位置を地図データに照合することにより、地図データから現在自車が走行している道路の形状を抽出し、現在配光制御を指令する自車が走行している道路が交差点内であるか前方に交差点がある場合は自車の進路を算出し配光制御処理の継続・非継続を判断する処理を行い、現在自車が走行している道路が交差点内ではなく、前方に交差点がない場合は配光制御処理を非継続とする。
【0013】
さらに、前記配光制御を指令する自車の進路を算出し配光制御処理の継続・非継続を判断する処理は、目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、目的地データがない場合もしくは交差点内を直進する場合においては配光制御処理を非継続とする。
【0014】
また、自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、交差点内を直進する場合においては配光制御処理を非継続とすることもできる。
【0015】
また、目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、目的地データがない場合は自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、交差点内を直進する場合においては配光制御処理を非継続とすることもできる。
【0016】
さらに、前記配光制御を指令する自車の周囲に存在する他車を検出する処理は、前記配光制御を指令する自車に設けられ自車の車両前方を撮像するカメラによって撮影された前方道路画像から自車以外の車両を抽出することによって他車を検出する。
【0017】
また、自車以外の車両が存在信号を発信し、自車の情報交換手段によって自車以外の車両が発信した存在信号を検知することによって他車を検出することもできる。
【0018】
さらに、前記配光制御を指令される車両を決定する処理は、前記配光制御を指令する自車以外に検出された他車に対して、自車が情報交換手段によって配光制御可否問合信号を相手車両に発信し、相手車両側で配光制御可否判断処理が行われ、相手車両側で行われた配光制御可否判断処理の結果を受信し、受信された結果から相手車両側が配光制御可能か否かを判断する。
【0019】
さらに、前記相手車両側で行われる配光制御可否判断処理は、前記車両が配光制御可能な状態になっているかどうかを判断し、配光制御可能な状態になっていれば、車速を検知し、車両の向きを検知し、検知された車速から車両が略停止状態であり、車体が配光制御を指令する自車の方を向いていると判断されたならば、自車に対して情報交換手段によって配光制御可能状態であることを伝達する。
【0020】
さらに、前記配光制御を指令される車両に備えられた外部照明装置の配光を制御する処理は、前記配光制御を指令される他車のランプによって照射したい範囲を算出し、配光制御を指令する自車が持っている情報を他車に伝達し、伝達された情報を元に他車が配光制御処理を行い、処理の終了判断処理を行い、処理が終了と判断された場合は他車に対して配光制御処理終了を伝達する。
【0021】
さらに、前記配光制御を指令される他車のランプよって照射したい範囲を算出する処理は、前記自車が現在照射している前照灯類の照度分布を算出し、地図情報上に照度分布をマッピングし、自車の前照灯類によって照射されていない範囲を抽出し、抽出された範囲をもとに照射位置を決定する。
【0022】
さらに、前記伝達された情報を元に配光制御を指令される車両が配光制御処理を行う処理は、前記配光制御を指令する車両からの情報信号を検出し、検出された情報信号が終了信号でなければ、情報信号の中に含まれる照射位置と配光制御を指令される車両の位置関係とを検出し、外部照明装置の照射範囲、照射方向を算出し、算出された照射範囲、照射方向に外部照明装置が向くようにアクチュエータを起動し、外部照明装置を照射し、検出された情報信号が終了信号であれば外部照明装置の照射を終了する。
【0023】
さらに、前記情報信号の中に含まれる照射位置と配光制御を指令される車両の位置関係とを検出する処理は、前記配光制御を指令される車両の位置を検出し、配光制御を指令する車両からの情報信号から照射位置の情報を抽出し、地図上に配光制御を指令される車両の位置と照射位置とをプロットする。
【0024】
さらに、前記配光制御を指令される車両の位置を検出する処理は、前記配光制御を指令する自車に備えられGPSからの信号を受信する手段によって受信されたGPS信号から受信位置の緯度経度を抽出し、抽出された緯度経度情報を車両の位置とする。
【0025】
さらに、前記外部照明装置の照射範囲、照射方向を算出する処理は、配光制御を指令される車両の車体の向きを検出し、車両位置と照射位置の位置関係と車体の向きとから外部照明装置の照射範囲と照射方向を算出する。
【0026】
さらに、前記終了判断を行う処理は、車両の位置を地図データに照合することにより、地図データから現在自車が走行している道路の形状を抽出し、現在配光制御を指令する自車が走行している道路が交差点内であるか前方に交差点がある場合は配光制御処理を継続とし、現在自車が走行している道路が交差点内ではなく、前方に交差点がない場合は配光制御処理を終了とする。
【0027】
また、前記道路情報検出手段によって走行道路形状を検出する処理は、車両の位置を地図データに照合することにより、地図データから現在自車が走行している道路の形状を抽出し、現在配光制御を指令する自車が走行している道路が交差点内である場合は自車の進路を算出し配光制御処理の継続・非継続を判断する処理を行い、現在自車が走行している道路が交差点内ではない場合は配光制御処理を継続とすることもできる。
【0028】
また、前記配光制御を指令する自車の進路を算出し配光制御処理の継続・非継続を判断する処理は、目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、目的地データがない場合もしくは交差点内を右折もしくは左折する場合においては配光制御処理を非継続とすることもできる。
【0029】
また、自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と、方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、交差点内を右折もしくは左折する場合においては配光制御処理を非継続とすることもできる。
【0030】
また、目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、目的地データがない場合は自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、交差点内を右折もしくは左折する場合においては配光制御処理を非継続とすることもできる。
【0031】
また、前記相手車両側で行われる配光制御可否判断処理は、車両が配光制御可能な状態になっているかどうかを判断し、配光制御可能な状態になっていれば、車両の向きを検知し、車体が配光制御を指令する自車の方を向いていると判断されたならば、自車に対して情報交換手段によって配光制御可能状態であることを伝達することもできる。
【0032】
また、前記終了判断を行う処理は、配光制御を指令する自車の位置を検出し、配光制御を指令される他車の位置を検出する処理を行い、地図情報上に自車と他車との位置をプロットし、地図情報上にプロットされた自車と他車との位置関係から他車が自車よりも前方に位置する場合は配光制御処理を継続とし、他車が自車よりも前方に位置しない場合は配光制御処理を終了とすることもできる。
【0033】
また、前記配光制御を指令する自車の位置を検出する処理は、前記配光制御を指令する自車に備えられGPSからの信号を受信する手段によって受信されたGPS信号から受信位置の緯度経度を抽出し、抽出された緯度経度情報を車両の位置とする。
【0034】
また、前記配光制御を指令される他車の位置を検出する処理は、配光制御を指令する自車に距離、方位測定手段を備え、この距離測定手段によって自車と他車との距離と方位を測定し、測定された他車との距離、方位から自車と他車との相対位置を求める。
【0035】
また、他車が保持している他車の位置情報を情報交換手段によって受信することもできる。
【0036】
また、終了判断を行う処理は、前記配光制御を指令する自車に設けられ自車の車両前方を撮像するカメラによって配光制御を指令される他車を撮影し、撮影された他車の画像から車両の外部照明装置部を抽出し、他車の外部照明装置が抽出できた場合は配光制御処理を継続とし、他車の外部照明装置が抽出できなかった場合は配光制御処理を終了とすることもできる。
【0037】
【作用】
本発明によれば、自車以外の車両の外部照明装置の配光が制御可能な状態にある場合、自車の前照灯によって照射することのできない範囲を補完的に他車の外部照明装置を用いて照射をし、自車の視認範囲拡大を行うことができる。
【0038】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。
本実施の形態では便宜上、配光制御を指令する側の車両を自車とし、実際配光制御される外部照明装置を車載している車両を他車と呼ぶこととする。
【0039】
図1は本発明の実施の形態に係る配光制御システムのブロック図である。自車側には車両位置検出手段41と走行状態検出手段51と道路情報検出手段61からの信号が演算手段31に入力され、そこで得られた信号を他車との情報交換手段71によって他車へ送信する。また、他車での処理の結果や他車内部で演算され求められた信号についてもこの他車との情報交換手段71を用いることにより、受信することができる。
【0040】
次に、他車側についても同様に車両位置検出手段42と走行状態検出手段52と道路情報検出手段62からの信号が演算手段32に入力される。また、自車との情報交換手段72を通して自車の情報を演算手段32に入力する。これら入力された信号を元に演算手段32で外部照明装置1の配光の制御量を算出し、制御手段2によって外部照明装置1の配光を制御する。
【0041】
前記外部照明装置1は照射範囲、照射方向等の照射状態が可変となっている。また、他車の運転者の視認には供しない照明装置となっている。
例えば、通常の自動車であれば主たる前照灯は運転者の視認に供するものであり、これとは別に備えられた照明装置ということになる。また、今後、自動運転車両が運行されるようになると自動運転車両と非自動運転車両との走行が混在する状況になってくる。このとき自動運転車両の乗員は運転を行うわけではないので、この車両に搭載される前照灯類は運転に供される訳ではないので、状況に応じて非自動運転車両の運転者の視認範囲確保のために非自動運転車両からの指令によって配光制御されるということも考えられる。
【0042】
本実施の形態では車両が自動運転モード、非自動運転モードにも対応できるよう外部照明装置1は図2に示すように主たる前照灯とは独立した照明装置として設置している。
自車、他車両車両の道路情報検出手段61,62として道路の状態を撮影するカメラ63と道路上に存在する車両等との距離を測定する為のレーザレーダ64が備わっている。
【0043】
自車、他車との情報交換手段 71,72としてアンテナ43が備わっており、これから発信される電波等を用いて、直接もしくは道路側の中継施設を通すなど間接的に自車他車間で情報をやりとりする。
車両位置検出手段41,42としてはGPS(Global Positioning System:衛星航法システム)からの信号を受信するため装置と受信されたGPS信号から位置情報を引き出すための地図データベースが車両内部に備わっている。
走行状態検出手段51,52としては車両の車速、舵角、方向指示器の動作状況を検出する。
【0044】
外部照明装置1の詳細な説明を図3から図5を用いて説明する。
図3は外部照明装置1全体の平面図、図4はランプ本体部11の一部正面図、図5はランプ本体部11の平面図。
ランプ本体11はレール12に沿って左右に移動することができる。制御装置2から出力された制御信号はコ−ドC1で各モ−タM1、M2、M3伝達され、ランプ本体11が求められた照射方向になるようにモータを駆動する。また、光源13を点灯するための照明電源と光源13はコ−ドC2で接続されて、制御手段2からの点灯指令を受けて電源がON、OFFされ、光源13が点灯、非点灯状態となる。なお、コ−ドC1および、コ−ドC2の長さはランプ本体11がレ−ル12の移動区間を動けるだけの余裕がある。
レール12の片側はベルトギアになっており、モータM3の軸に付けられたギアG1が回転することでランプ本体11が左右に動くことになる。また、モータM1によって軸15が回転しランプ本体11の光軸が左右に振れる。また、モータM2によって軸16が回転しランプ本体11の光軸が上下に振れる。
ランプ本体11の内部に光源13が存在し鏡体14がズームレンズとなっていて、光源13の光を適宜集光拡散している。
【0045】
次にフローチャートを用いて交差点での右左折時の処理について説明する。 処理全体の流れを図6のフローチャートを用いて説明すると、システムの稼働判断ステップ(以下、ステップをSと記す。)1、配光制御処理の継続判断S2、自車周囲にいる車両の検出S3、配光を制御する車両の決定S4、配光制御S5という具合に処理は流れていく。
【0046】
システムの稼働判断S1について図7のフローチャートを用いて説明する。処理が開始されると、自車の走行状態の検出S11を行い、自車が走行状態か否かの判断S12を行う。
走行状態であれば処理を続行し、走行状態でなければ処理は終了となる。処理が続行されれば配光制御の可・不可判断S13が行われ、S14で配光制御が可能であれば次の処理S2へと進む。S14で配光制御が不可の状態であれば処理は走行状態の検出S11へと戻る。
【0047】
走行状態の検出S11は図8のフローチャートに示すように、エンジンの起動状態を検出S111し、S112でエンジンが起動されていればS113で走行状態と判断し、S112でエンジンが起動されていなければS114で非走行状態と判断される。
【0048】
配光制御の可・不可判断S13は図9のフローチャートに示すように、配光制御モードのスイッチ状態を検出S131し、S132でスイッチがオンになっていればS133で配光制御可と判断し、S132でスイッチがオフになっていればS134で配光制御不可と判断される。
配光制御モードのスイッチとしては運転者自らが手動でオンオフできるスイッチのほか、非自動運転であることを認識すると配光制御モードになるという自動スイッチが考えられる。
【0049】
配光制御処理の継続判断S2について図10のフローチャートを用いて説明する。処理が開始されると、自車の車両位置の検出S21と走行道路の形態の検出S22とを行い、S23に進んで自車が現在いる地点が配光制御を必要とする場所か否かを判断して、配光制御を必要とする場所であれば、配光制御処理を継続するため次の処理S3へと進む。配光制御を必要としない場所であればシステムの稼働判断S1へと処理を戻す。
【0050】
車両の位置の検出S21は図11のフローチャートに示すように、GPSからの信号を受信S211し、受信した信号の中から受信位置の緯度経度の情報を抽出S212する。
【0051】
走行道路の形態の検出S22は図12のフローチャートに示すように、車両の位置の検出S21で抽出された自車の位置情報をもとに車両があらかじめ持っている地図データベースから、車両の現在地点における道路形状の照合を行うS221。車両の位置が緯度A、経度Bとなったとき、図13に示すように地図上では緯度A、経度Bの交点で車両の位置が示される。地図上で位置が示されたならば、地図に含まれる道路形状データから車両周辺の道路形状が特定できる。特定した道路形状から車両の位置が図13のC2のように交差点内である場合か、または、C1のように前方に交差点がある場合はS222またはS223からS224に進み自車の進路を算出し配光制御処理の継続・非継続の判断を行う。C3のように車両の位置が交差点内ではなく、前方に交差点がない場合はS222からS223、S225と進んで配光制御処理を非継続とする。
【0052】
自車の進路を算出し配光制御処理の継続・非継続の判断S224は図14のフローチャートに示すように、S2241で車載している地図データベースに目的地データが入力されていると、その入力されている目的地データと車両の現在位置データから目的地までの進路の算出S2242を行う。進路の算出を行った結果、現在走行中の交差点、もしくはこれから進入しようとする交差点で右折もしくは左折すると判断された場合はS2243からS2244へ進んで配光制御処理を継続する。S2241で目的地データがない場合やS2243で交差点を直進する場合はS2245に進んで配光制御処理は非継続とする。
【0053】
また、自車の進路を算出し配光制御処理の継続・非継続の判断S224は図15のフローチャートに示すような処理にすることもできる。
舵角の検出S2246と方向指示器の動作状態の検出S2247とを行い、これら2つの情報から車両の進行方向の予測S2248を行う。予測された進路から現在走行中の交差点、もしくはこれから進入しようとする交差点で右折もしくは左折すると判断された場合はS2243からS2244へ進んで配光制御処理を継続する。交差点を直進すると判断された場合はS2245へ進んで配光制御処理は非継続とする。
【0054】
また、自車の進路を算出し配光制御処理の継続・非継続の判断S224は図16のフローチャートに示すような処理にすることもできる。
S2241で車載している地図データベースに目的地データが入力されていると、その入力されている目的地データと車両の現在位置データから目的地までの進路の算出S2242を行う。進路の算出を行った結果、現在走行中の交差点、もしくはこれから進入しようとする交差点で右折もしくは左折すると判断された場合はS2243からS2244へ進んで配光制御処理を継続する。交差点を直進する場合はS2243からS2245へ進んで配光制御処理は非継続とする。S2241で目的地データがない場合は舵角の検出S2246と方向指示器の動作状態の検出S2247とを行い、これら2つの情報から車両の進行方向の予測S2248を行う。予測された進路から現在走行中の交差点、もしくはこれから進入しようとする交差点で右折もしくは左折すると判断された場合はS2243からS2244へ進み配光制御処理を継続する。交差点を直進すると判断された場合はS2245に進んで配光制御処理は非継続とする。
【0055】
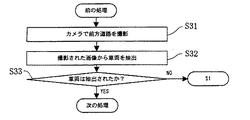
自車周囲にいる車両の検出S3について図17のフローチャートを用いて説明する。処理が開始されると、自車に備え付けられた前方道路の状況を検出するカメラ63によって前方道路画像の撮影S31を行い、撮影された画像から車両の抽出S32を行う。その結果S33で車両が抽出されれば次の処理S4に進み、車両が抽出されなかった場合はシステムの稼働判断S1へと処理を戻す。
【0056】
また、自車周囲にいる車両の検出S3について図18のフローチャートに示すような処理をすることも可能である。処理が開始されると、他車との情報交換手段71が他車から発信される存在信号の監視S34を行い、その結果S35で他車からの存在信号が検出されれば次の処理S4に進み、他車からの存在信号が検出されなかった場合はシステムの稼働判断S1へと処理を戻す。
【0057】
配光制御する車両の決定S4について図19のフロチャートを用いて説明する。処理が開始されると、自車は他車に対して配光制御間合信号の発信S41を他車との情報交換手段71を通して行う。この間合信号を受けた他車は配光制御可否判断処理S42を行い、その結果を他車との情報交換手段71を通して自車に返してくる。他車からの可否判断信号を受信S43した結果、S45で配光制御が可能な状態であれば次の処理S5に進み、S45で配光制御が可能な状態でなければS46で他に検出された車両の有無を確認し、他に検出した車両があれば配光制御間合信号の発信S41へ処理を戻し、他に検出した車両がなければシステムの稼働判断S1へと処理を戻す。
【0058】
図20にかかる処理は他車側での処理となる。
他車の配光制御可否判断処理S42は図20のフローチャートに示すように配光制御が可能な状態かどうかの検出S421を行う。配光制御が可能な状態かどうかの検出S421は前記配光制御の可・不可判断S13と同様に図9のフローチャートに示すように配光制御モードのスイッチ状態を検出し(S131)、スイッチがオンになっていれば配光制御可と判断し、スイッチがオフになっていれば配光制御不可と判断される。配光制御モードのスイッチとしては運転者自らが手動でオンオフできるスイッチのほか、自動運転であることを認識すると配光制御モードになるという自動スイッチが考えられる。S422で配光制御が可能になっていれば車速の検出S423と車両の向きの検出S425とを行う。S424で車両が略停止状態であり、S426で他車が自車の方を向いていれば配光制御可能であると判断し、S427で自車との情報交換手段72を通して配光制御可能状態であることを自車に伝達する。配光制御が可能でないか、S424で車両が略停止状態でないか、S426で他車が自車の方を向いていないかのいずれかの場合であれば配光制御可能ではないと判断し、S428で自車との情報交換手段72を通して配光制御不可能状態であることを自車に伝達する。
【0059】
配光制御S5について図21のフローチャートを用いて説明する。処理が開始されると、他車の外部照明装置1によって光を照射したい照射範囲の算出S51を行う。算出された照射範囲を自車からの情報として他車との情報交換手段71を通して他車への伝達S52を行う。他車は自車から受け取った情報を元に配光制御処理S53を行い外部照明装置1の照射を行う。他車が配光制御処理S53を行った結果のフィードバック情報の受信S54を他車との情報交換手段71を通して行う。フィードバック情報を元にS55で他車が配光制御に成功したと判断した場合は終了判断S56を行い、他車が配光制御に成功しなかったと判断した場合は自車周囲にいる車両の検出S3へ処理を戻る。終了判断S56で判断した結果、配光制御を必要とする状況を抜けたと判断した場合はS57からS58へ進んで配光制御処理終了信号を他車との情報交換手段71を通して他車への伝達を行い、システムの稼働判断S1へと処理を戻す。終了判断S56で判断した結果、配光制御を必要とする状況を抜けていないと判断した場合はS57からS51へ戻って処理を照射範囲の算出に戻し、配光制御を必要とする状況を抜けるまで繰り返す。
【0060】
他車の外部照明装置1によって光を照射したい照射範囲の算出S51は図22のフローチャートに示すように自車の主前照灯の照度分布の算出S511を行う。図23に示すような前照灯の視認可能な照度での等照度曲線8をあらかじめデータとして自車が持っているか、自車の前照灯が配光制御可能なものであれば、前照灯に用いられている光源や反射板やレンズといった光学素子の特性から等照度曲線8を計算で求めてもよい。算出された自車の主前照灯の照度分布を地図データ上にマッピングS512を行う。照度分布をマッピングした地図データから自車の主前照灯の照射範囲にかからない場所の抽出S513を行う。抽出された領域を元に他車の外部照明装置1によって光を照射したい照射範囲の決定S514を行う。図24に示すように右折の場合には自車の主前照灯の照射範囲にかかっていない予想進路上の領域9を照射範囲として決定する。
【0061】
図25から図27のフローチャートに示す処理は他車側での処理となる。
配光制御処理S53は図25に示すように自車からの情報信号の検出S531を行い、S532で情報信号が検出されるまで情報信号の検出を繰り返す。自車からの情報信号を検出したらS533でその信号が終了信号か否かを判断する。終了信号でなければ配光制御による照射位置と他車の位置関係の検出S534を行う。
【0062】
検出された照射位置と他車の位置関係から照明装置の照射範囲・照射方向の算出S536を行う。算出された照射範囲・照射方向が制御可能か否かを自車との情報交換手段72を通して自車へのフィードバックS537を行う。S538で照射可能な値が算出されたのであれば照明装置が算出された照射範囲・照射方向に向くようにアクチュエータの起動S539を行いS5310で照明装置の照射もしくはすでに点灯しているのであれば照明装置の照射継続を行い、情報信号の検出S531へ処理が戻って自車からの情報信号を待ち受ける。情報信号の検出S531で検出された情報信号が終了信号と判断された場合は照明装置の照射の終了S535を行い、情報信号の検出S531へ処理が戻って自車からの情報信号を待ち受ける。また、照明装置の照射範囲・照射方向の算出S536によって得られた値が照射不可能な値であったならば算出した照射範囲・照射方向にすることなく、情報信号の検出S531へ処理が戻って自車からの情報信号を待ち受ける。
【0063】
照射位置と他車の位置関係の検出S534は図26のフローチャートに示すように他車の車両位置の検出S5341を行う。車両位置の検出S5341は前記車両の位置の検出S21と同様に図11のフローチャートに示すようにGPSからの信号を受信S211し、受信した信号の中から受信位置の緯度経度の情報を抽出S212する。また、自車からの情報信号から照射位置の情報の抽出S5342を行い、車両位置の検出S5341で検出された車両の位置と照射位置の情報の抽出S5342で抽出された照射位置を地図データ上にプロットS5344する。
【0064】
照明装置の照射範囲・照射方向の算出S536は図27のフローチャートに示すように車体の向きの検出S5361を行う。照射位置と他車の位置関係の検出S534で検出された照射位置と他車の位置関係と車体の向きの検出S5361で検出された車体の向きから照射方向と照射範囲を算出S5362する。算出方法を図28と図29を用いて説明する。領域9はS51で算出された他車の外部照明装置1によって光を照射したい照射範囲であり、他車および自車との情報交換手段71,72を用いて自車から他車へ情報信号によって位置データとして送信されている。領域9の略中心と外部照明装置1とを結ぶ線L2の方向が外部照明装置1の左右方向の光軸の向きとなる。また外部照明装置1から領域9の略中心を結ぶ線L21と外部照明装置1から鉛直に地面に降ろした点から領域9の略中心を通る線L22とがなす角度dが外部照明装置1の光軸の上下方向の向きとなる。また領域9の外側と外部照明装置1とを結んだ線L31及びL32によってできた角度Wが外部照明装置1の照射範囲となる。S5363で求められた照射範囲・照射方向が実際に外部照射装置によって可動できる範囲にあるかを判断して、可動できる範囲にあればS5364で照射可能と判断し、可動できる範囲からはずれている場合はS5365で照射不可能と判断される。
【0065】
終了判断S56は図30のフローチャートに示すように自車の位置情報をもとに車両があらかじめ持っている地図データベースから、車両の現在地点の道路形状の照合S561を行う。S562およびS563で照合した結果得られた道路形状から車両の位置が交差点内であるか、前方に交差点がある場合は配光制御を必要とする状況を抜けていないと判断し、S564で処理を継続とする。車両の位置が交差点内ではなく、前方に交差点がない場合は配光制御を必要とする状況を抜けたと判断し、S565で処理を終了とする。
【0066】
次に右左折時以外の処理について説明する。
図31(a)にすれ違いシーンでの状況、図31(b)に他車が駐停車車両である場合について図示している。いずれの場合も直線路での状況であるが、曲線路や交差点近辺での状況でもいずれも処理は同じになる。
すれ達いシーンでは自車他車ともに車両が動いており基本的には両車両とも主前照灯が照射されている。自車の照射範囲81、他車の照射範囲82とすると道路上は2つの前照灯のいずれかによって照射されている。よって他車の側方部の路側付近の領域91部分がこの状況においては他車の外部照明装置1によって照射したい領域といえる。
【0067】
次に他車が駐停車車両である場合は自車のみが主前照灯を照射していることになる。自車の前照灯は自車の走行車線を照射するのみである。よって他車側の車線、特に歩行者等が存在する可能性の高い路側付近の領域92部分がこの状況においては他車の外部照明装置1によって照射したい領域といえる。
【0068】
次にフローチャートを用いて処理の説明を行う。
図6から図11にかかる処理項目については右左折時の処理と同じなので説明を省略し、処理内容の相違点についてのみ説明する。
走行道路の形態の検出S22は図32のフローチャートに示すように車両の位置の検出S21で抽出された自車の位置情報をもとに車両があらかじめ持っている地図データベースから、車両の現在地点の道路形状の照合を行うS221。車両の位置が緯度A、経度Bとなったとき、図13に示すように地図上では緯度A、経度Bの交点で車両の位置が示される。地図上で位置が示されたならば、地図に含まれる道路形状データから車両周辺の道路形状が特定できる。S222で特定した道路形状から車両の位置が図13のC2のように交差点内である場合は自車の進路を算出し配光制御処理の継続・非継続の判断S224を行う。S222でC3のように車両の位置が交差点内ではない場合はS226で配光制御処理を継続とする。
【0069】
自車の進路を算出し配光制御処理の継続・非継続の判断S224は図33のフローチャートに示すように、S2241で車載している地図データベースに目的地データが入力されていると、S2242でその入力されている目的地データと車両の現在位置データから目的地までの進路の算出を行う。進路の算出を行った結果、S2249で現在走行中の交差点を直進すると判断された場合は、S2244で配光制御処理を継続する。S2241で目的地データがない場合やS2249で交差点を右折もしくは左折する場合は、S2245に進んで配光制御処理は非継続とする。
【0070】
また、自車の進路を算出し配光制御処理の継続・非継続の判断S224は図34に示すような処理にすることもできる。
舵角の検出S2246と方向指示器の動作状態の検出S2247とを行い、これら2つの情報から車両の進行方向の予測S2248を行う。S2249で予測された進路から現在走行中の交差点を直進すると判断された場合はS2244で配光制御処理を継続する。S2249で交差点を右折もしくは左折する場合はS2245に進んで配光制御処理は非継続とする。
【0071】
また、自車の進路を算出し配光制御処理の継続・非継続の判断S224は図35のフローチャートに示すような処理にすることもできる。
S2241で車載している地図データベースに目的地データが入力されていると、その入力されている目的地データと車両の現在位置データから目的地までの進路の算出S2242を行う。
【0072】
進路の算出を行った結果、S2249において現在走行中の交差点、もしくはこれから進入しようとする交差点を直進する場合は、S2244で配光制御処理を継続する。S2249で交差点を右折もしくは左折すると判断された場合は、S2245へ進んで配光制御処理は非継続とする。S2241で目的地データがない場合は舵角の検出S2246と方向指示器の動作状態の検出S2247を行い、これら2つの情報から車両の進行方向の予測S2248を行う。次にS2249へ進んで現在走行中の交差点を直進すると判断された場合は、S2244で配光制御処理を継続する。S2249で交差点を右折もしくは左折する場合は、S2245に進んで配光制御処理は非継続とする。
【0073】
図17から図19にかかる処理項目については右左折時の処理と同じなので説明を省略し、処理内容の相違点についてのみ説明する。
他車の配光制御可否判断処理S42は図36に示すように配光制御が可能な状態かどうかの検出S421を行う。配光制御が可能な状態かどうかの検出S421は前記配光制御の可・不可判断S13と同様に図9のフローチャートに示すように配光制御モードのスイッチ状態を検出S131し、スイッチがオンになっていれば配光制御可と判断し、スイッチがオフになっていれば配光制御不可と判断される。配光制御モードのスイッチとしては運転者自らが手動でオンオフできるスイッチのほか、自動運転であることを認識すると配光制御モードになるという自動スイッチが考えられる。S422で配光制御が可能になっていれば車両の向きの検出S425を行う。次にS426で他車が自車の方を向いていれば配光制御可能であると判断し、S427で自車との情報交換手段72を通して配光制御可能状態であることを自車に伝達する。S422で配光制御が可能でないか、S426で他車が自車の方を向いていないかのいずれかの場合であれば配光制御可能ではないと判断し、S428で自車との情報交換手段72を通して配光制御不可能状態であることを自車に伝達する。
【0074】
図21、図22と図25から図27にかかる処理項目については右左折時の処理と同じなので説明を省略し、処理内容の相違点についてのみ説明する。
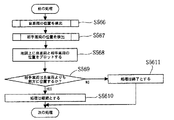
終了判断S56は図37のフローチャートに示すように自車の車両位置の検出S566と他車の車両位置の検出S567とを行う。自車の車両位置の検出S566は前記車両の位置の検出S21と同様に図11のフローチャートに示すようにGPSからの信号を受信S211し、受信した信号の中から受信位置の緯度経度の情報を抽出S212する。次にS568で自車と他車の位置情報を車両があらかじめ持っている地図データベースにある地図データ上にプロットする。S569で、これにより得られた自車、他車の位置関係から自車から見て他車が自車よりも前方にある場合は、S5610に進んで配光制御を必要とする状況を抜けていないと判断し処理を継続とする。S569で自車から見て他車が自車よりも前方にない場合は、S5611に進んで配光制御を必要とする状況を抜けたと判断し処理を終了とする。
【0075】
他車の車両位置の検出S567は図38のフローチャートに示すようにレーザレーダ64で他車との距離の測定S5661を行い、次にS5662で自車と他車との相対位置から他車の位置を求める。
【0076】
また、他車の車両位置の検出S567は図39のフローチャートに示すように他車が他車の車両位置検出処理S5341で検出した車両位置をS5663で他車との情報交換手段71を通して自車が受信することによっても可能である。
【0077】
また、終了判断S56は図40のフローチャートに示すように自車に備え付けられた前方道路の状況を検出するカメラ63によって車両前方の画像の撮影S5612を行い、撮影された画像から他車の外部照明装置1の抽出S5613を行う。
【0078】
次にS5614で外部照明装置1が抽出されたならば自車から見て他車が自車よりも前方にあると判断でき、S5610へ進んで配光制御を必要とする状況を抜けていないと判断し処理を継続とする。S5614で外部照明装置1が抽出されなかったならば自車から見て他車が自車よりも前方にないと判断でき、S5611へ進んで配光制御を必要とする状況を抜けたと判断し処理を終了とする。
【0079】
【発明の効果】
以上説明してきたように、本発明によれば、自車以外の車両の外部照明装置の配光が制御可能な状態にある場合、自車の前照灯類によって照射することのできない範囲を補完的に他車の外部照明装置を用いて照射をし、自車の視認範囲拡大を行うことできるという効果がある。
【図面の簡単な説明】
【図1】本発明実施の形態に係る配光制御システムのブロック図である。
【図2】実施の形態の外部照明装置、カメラ、レーザレーダ、およびアンテナの車両における設置場所を示す斜視図である。
【図3】実施の形態の外部照明装置全体の平面図である。
【図4】実施の形態のランプ本体の一部正面図である。
【図5】実施の形態のランプ本体の平面図である。
【図6】実施の形態の処理全体の流れを示すフローチャートである。
【図7】システムの稼働判断フローチャートである。
【図8】走行状態の検出フローチャートである。
【図9】配光制御の可・不可判断フローチャートである。
【図10】配光制御処理の継続判断フローチャートである。
【図11】車両の位置の検出フローチャートである。
【図12】走行道路の形態の検出フローチャートである。
【図13】走行道路の形態の検出を説明する図である。
【図14】配光制御処理の継続・非継続の判断フローチャートである。
【図15】配光制御処理の継続・非継続の判断フローチャートである。
【図16】配光制御処理の継続;非継続の判断フローチャートである。
【図17】自車周囲にいる車両の検出フローチャートである。
【図18】自車周囲にいる車両の検出フローチャートである。
【図19】配光制御する車両の決定フローチャートである。
【図20】他車の配光制御可否判断処理フローチャートである。
【図21】配光制御フローチャートである。
【図22】照射範囲の算出フローチャートである。
【図23】照射範囲の算出を説明する図である。
【図24】照射範囲の算出を説明する図である。
【図25】配光制御処理フローチャートである。
【図26】照射位置と他車の位置関係の検出フローチャートである。
【図27】照明装置の照射範囲・照射方向の算出フローチャートである。
【図28】照明装置の照射範囲・照射方向の算出を説明する図である。
【図29】照明装置の照射範囲・照射方向の算出を説明する図である。
【図30】終了判断フローチャートである。
【図31】(a)すれ違いシーンでの状況を説明する図である。(b)他車が駐停車車両である場合を説明する図である。
【図32】走行道路の形態の検出フローチャートである。
【図33】配光制御処理の継続・非継続の判断フローチャートである。
【図34】配光制御処理の継続・非継続の判断フローチャートである。
【図35】配光制御処理の継続・非継続の判断フローチャートである。
【図36】他車の配光制御可否判断処理フローチャートである。
【図37】終了判断フローチャートである。
【図38】他車の車両位置の検出フローチャートである。
【図39】他車の車両位置の検出フローチャートである。
【図40】終了判断フローチャートである。
【符号の説明】
1 外部照明装置
2 制御手段
8 等照度曲線
9 領域
11 ランプ本体
12 レール
13 光源
14 鏡体
15 軸
16 軸
31 演算手段
32 演算手段
41 車両位置検出手段
42 車両位置検出手段
43 アンテナ
51 走行状態検出手段
52 走行状態検出手段
61 道路情報検出手段
62 道路情報検出手段
63 カメラ
64 レーザレーダ
71 他車との情報交換手段
72 自車との情報交換手段
81 自車の照射範囲
82 他車の照射範囲
91 路側付近の領域
92 路側付近の領域
【発明の属する技術分野】
この発明は、車両に設けられて、車両の外部を照射する配光制御システムに関するものである。
【0002】
【従来の技術】
従来、車両の外部照明装置としては、ヘッドランプやフォグランプなど主として車両に対して前方方向を照射し夜間走行時の前方視認性を確保するものや、コーナリングランプのように車両が旋回するときに、車両の側方を照射し、側方視認性を確保するものがある。また、ヘッドランプなどは、対向車や先行車が存在した場合に走行ビームとすれ違いビームとを切り替えることにより、対向車や先行車に幻惑を与えないようにすることができるようになっている。
【0003】
また、最近では光軸や配光パターンを変更することで自車の存在を他車に知らしめるような技術も公開されつつある。
例えば、特開平5−4546(特願平3−157013)号公報に示すように、優先道路を走行中の車両が非優先道路を走行中の車両を認識すると照射距離を長くし、非優先道路側を走行する車両の照射距離を短くするように配光を制御する技術がある。
【0004】
【発明が解決しようとする課題】
しかしながら、上述の特開平3−157013号公報にあるような技術では他車に自車を認識させやすくするために配光を制御するわけであり、前照灯本来の使用目的である視認性の向上には供していないという問題点があった。
本発明は上記のことを鑑み、自車以外の車両の外部照明装置 の配光が制御可能な状態にある場合、自車の前照灯類によって照射することのできない範囲を補完的に他車の外部照明装置を用いて照射をし、自車の視認範囲拡大を行うことを目的としている。
【0005】
【課題を解決するための手段】
上記目的を達成するために、本発明の配光制御システムは、配光制御を指令する自車と、配光制御を指令される他車と、に設けられた配光制御システムであって、前記配光制御を指令する自車が、車両位置検出手段と走行状態検出手段と道路情報検出手段と演算手段と車両同士が情報を相互に交換するための情報交換手段とを備え、前記車両位置検出手段と走行状態検出手段と道路情報検出手段とによって得られた各種情報を前記演算手段によって処理し、その結果得られた情報を前記配光制御を指令される他車へ情報を送信し、前記配光制御を指令される他車が、車両位置検出手段と走行状態検出手段と道路情報検出手段と演算手段と車両同士が情報を相互に交換するための情報交換手段と搭乗者の視認に供しない外部照明装置と外部照明装置をコントロールするための制御装置とを備え、前記車両位置検出手段と走行状態検出手段と道路情報検出手段とによって得られた各種情報と配光制御を指令する自車から送信されてきた情報とを前記演算手段によって処理し、その情報をもとに前記制御装置を作動させ、前記外部照明装置の配光を制御する。
【0006】
さらに、前記配光制御システムは、システムの稼働を判断する処理と、配光制御処理の継続を判断する処理と、配光制御を指令する自車の周囲に存在する他車を検出する処理と、配光を制御させる車両を決定する処理と、その配光を制御させる車両に備えられた外部照明装置の配光を制御する処理と、を備えている。
【0007】
さらに、前記システムの稼働を判断する処理は、前記配光制御を指令する自車の走行状態検出手段によって自車の走行状態を検出し、自車が走行状態でなければ処理を終了し、自車が走行状態であれば配光制御の可・不可判断を行い、配光制御が可能な状態であれば配光制御処理を行う。
【0008】
さらに、前記自車の走行状態検出手段は、前記自車のエンジンが起動しているかどうかを検出してエンジンが起動されていれば走行状態と判断し、エンジンが起動されていなければ非走行状態と判断する。
【0009】
さらに、前記配光制御の可・不可判断は、この配光制御の可・不可判断に備えられた配光制御モードのスイッチの状態を検知して、スイッチがオンの状態であれば配光制御可と判断し、スイッチがオフの状態であれば配光制御不可と判断する。
【0010】
さらに、前記配光制御処理の継続を判断する処理は、前記配光制御を指令する自車の車両位置検出手段によって自車の車両位置を検出する処理と、得られた自車の車両位置をもとに道路情報検出手段によって走行道路形態を検出する処理と、を備え、得られた走行道路の形態に応じて配光制御の処理を継続するかどうかを判断する。
【0011】
さらに、前記車両位置検出手段は、GPSからの信号を受信する手段を備え、受信されたGPS信号から受信位置の緯度経度を抽出し、抽出された緯度経度情報を車両の位置とする。
【0012】
さらに、前記道路情報検出手段によって走行道路形態を検出する処理は、車両の位置を地図データに照合することにより、地図データから現在自車が走行している道路の形状を抽出し、現在配光制御を指令する自車が走行している道路が交差点内であるか前方に交差点がある場合は自車の進路を算出し配光制御処理の継続・非継続を判断する処理を行い、現在自車が走行している道路が交差点内ではなく、前方に交差点がない場合は配光制御処理を非継続とする。
【0013】
さらに、前記配光制御を指令する自車の進路を算出し配光制御処理の継続・非継続を判断する処理は、目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、目的地データがない場合もしくは交差点内を直進する場合においては配光制御処理を非継続とする。
【0014】
また、自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、交差点内を直進する場合においては配光制御処理を非継続とすることもできる。
【0015】
また、目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、目的地データがない場合は自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、交差点内を直進する場合においては配光制御処理を非継続とすることもできる。
【0016】
さらに、前記配光制御を指令する自車の周囲に存在する他車を検出する処理は、前記配光制御を指令する自車に設けられ自車の車両前方を撮像するカメラによって撮影された前方道路画像から自車以外の車両を抽出することによって他車を検出する。
【0017】
また、自車以外の車両が存在信号を発信し、自車の情報交換手段によって自車以外の車両が発信した存在信号を検知することによって他車を検出することもできる。
【0018】
さらに、前記配光制御を指令される車両を決定する処理は、前記配光制御を指令する自車以外に検出された他車に対して、自車が情報交換手段によって配光制御可否問合信号を相手車両に発信し、相手車両側で配光制御可否判断処理が行われ、相手車両側で行われた配光制御可否判断処理の結果を受信し、受信された結果から相手車両側が配光制御可能か否かを判断する。
【0019】
さらに、前記相手車両側で行われる配光制御可否判断処理は、前記車両が配光制御可能な状態になっているかどうかを判断し、配光制御可能な状態になっていれば、車速を検知し、車両の向きを検知し、検知された車速から車両が略停止状態であり、車体が配光制御を指令する自車の方を向いていると判断されたならば、自車に対して情報交換手段によって配光制御可能状態であることを伝達する。
【0020】
さらに、前記配光制御を指令される車両に備えられた外部照明装置の配光を制御する処理は、前記配光制御を指令される他車のランプによって照射したい範囲を算出し、配光制御を指令する自車が持っている情報を他車に伝達し、伝達された情報を元に他車が配光制御処理を行い、処理の終了判断処理を行い、処理が終了と判断された場合は他車に対して配光制御処理終了を伝達する。
【0021】
さらに、前記配光制御を指令される他車のランプよって照射したい範囲を算出する処理は、前記自車が現在照射している前照灯類の照度分布を算出し、地図情報上に照度分布をマッピングし、自車の前照灯類によって照射されていない範囲を抽出し、抽出された範囲をもとに照射位置を決定する。
【0022】
さらに、前記伝達された情報を元に配光制御を指令される車両が配光制御処理を行う処理は、前記配光制御を指令する車両からの情報信号を検出し、検出された情報信号が終了信号でなければ、情報信号の中に含まれる照射位置と配光制御を指令される車両の位置関係とを検出し、外部照明装置の照射範囲、照射方向を算出し、算出された照射範囲、照射方向に外部照明装置が向くようにアクチュエータを起動し、外部照明装置を照射し、検出された情報信号が終了信号であれば外部照明装置の照射を終了する。
【0023】
さらに、前記情報信号の中に含まれる照射位置と配光制御を指令される車両の位置関係とを検出する処理は、前記配光制御を指令される車両の位置を検出し、配光制御を指令する車両からの情報信号から照射位置の情報を抽出し、地図上に配光制御を指令される車両の位置と照射位置とをプロットする。
【0024】
さらに、前記配光制御を指令される車両の位置を検出する処理は、前記配光制御を指令する自車に備えられGPSからの信号を受信する手段によって受信されたGPS信号から受信位置の緯度経度を抽出し、抽出された緯度経度情報を車両の位置とする。
【0025】
さらに、前記外部照明装置の照射範囲、照射方向を算出する処理は、配光制御を指令される車両の車体の向きを検出し、車両位置と照射位置の位置関係と車体の向きとから外部照明装置の照射範囲と照射方向を算出する。
【0026】
さらに、前記終了判断を行う処理は、車両の位置を地図データに照合することにより、地図データから現在自車が走行している道路の形状を抽出し、現在配光制御を指令する自車が走行している道路が交差点内であるか前方に交差点がある場合は配光制御処理を継続とし、現在自車が走行している道路が交差点内ではなく、前方に交差点がない場合は配光制御処理を終了とする。
【0027】
また、前記道路情報検出手段によって走行道路形状を検出する処理は、車両の位置を地図データに照合することにより、地図データから現在自車が走行している道路の形状を抽出し、現在配光制御を指令する自車が走行している道路が交差点内である場合は自車の進路を算出し配光制御処理の継続・非継続を判断する処理を行い、現在自車が走行している道路が交差点内ではない場合は配光制御処理を継続とすることもできる。
【0028】
また、前記配光制御を指令する自車の進路を算出し配光制御処理の継続・非継続を判断する処理は、目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、目的地データがない場合もしくは交差点内を右折もしくは左折する場合においては配光制御処理を非継続とすることもできる。
【0029】
また、自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と、方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、交差点内を右折もしくは左折する場合においては配光制御処理を非継続とすることもできる。
【0030】
また、目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、目的地データがない場合は自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、交差点内を右折もしくは左折する場合においては配光制御処理を非継続とすることもできる。
【0031】
また、前記相手車両側で行われる配光制御可否判断処理は、車両が配光制御可能な状態になっているかどうかを判断し、配光制御可能な状態になっていれば、車両の向きを検知し、車体が配光制御を指令する自車の方を向いていると判断されたならば、自車に対して情報交換手段によって配光制御可能状態であることを伝達することもできる。
【0032】
また、前記終了判断を行う処理は、配光制御を指令する自車の位置を検出し、配光制御を指令される他車の位置を検出する処理を行い、地図情報上に自車と他車との位置をプロットし、地図情報上にプロットされた自車と他車との位置関係から他車が自車よりも前方に位置する場合は配光制御処理を継続とし、他車が自車よりも前方に位置しない場合は配光制御処理を終了とすることもできる。
【0033】
また、前記配光制御を指令する自車の位置を検出する処理は、前記配光制御を指令する自車に備えられGPSからの信号を受信する手段によって受信されたGPS信号から受信位置の緯度経度を抽出し、抽出された緯度経度情報を車両の位置とする。
【0034】
また、前記配光制御を指令される他車の位置を検出する処理は、配光制御を指令する自車に距離、方位測定手段を備え、この距離測定手段によって自車と他車との距離と方位を測定し、測定された他車との距離、方位から自車と他車との相対位置を求める。
【0035】
また、他車が保持している他車の位置情報を情報交換手段によって受信することもできる。
【0036】
また、終了判断を行う処理は、前記配光制御を指令する自車に設けられ自車の車両前方を撮像するカメラによって配光制御を指令される他車を撮影し、撮影された他車の画像から車両の外部照明装置部を抽出し、他車の外部照明装置が抽出できた場合は配光制御処理を継続とし、他車の外部照明装置が抽出できなかった場合は配光制御処理を終了とすることもできる。
【0037】
【作用】
本発明によれば、自車以外の車両の外部照明装置の配光が制御可能な状態にある場合、自車の前照灯によって照射することのできない範囲を補完的に他車の外部照明装置を用いて照射をし、自車の視認範囲拡大を行うことができる。
【0038】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。
本実施の形態では便宜上、配光制御を指令する側の車両を自車とし、実際配光制御される外部照明装置を車載している車両を他車と呼ぶこととする。
【0039】
図1は本発明の実施の形態に係る配光制御システムのブロック図である。自車側には車両位置検出手段41と走行状態検出手段51と道路情報検出手段61からの信号が演算手段31に入力され、そこで得られた信号を他車との情報交換手段71によって他車へ送信する。また、他車での処理の結果や他車内部で演算され求められた信号についてもこの他車との情報交換手段71を用いることにより、受信することができる。
【0040】
次に、他車側についても同様に車両位置検出手段42と走行状態検出手段52と道路情報検出手段62からの信号が演算手段32に入力される。また、自車との情報交換手段72を通して自車の情報を演算手段32に入力する。これら入力された信号を元に演算手段32で外部照明装置1の配光の制御量を算出し、制御手段2によって外部照明装置1の配光を制御する。
【0041】
前記外部照明装置1は照射範囲、照射方向等の照射状態が可変となっている。また、他車の運転者の視認には供しない照明装置となっている。
例えば、通常の自動車であれば主たる前照灯は運転者の視認に供するものであり、これとは別に備えられた照明装置ということになる。また、今後、自動運転車両が運行されるようになると自動運転車両と非自動運転車両との走行が混在する状況になってくる。このとき自動運転車両の乗員は運転を行うわけではないので、この車両に搭載される前照灯類は運転に供される訳ではないので、状況に応じて非自動運転車両の運転者の視認範囲確保のために非自動運転車両からの指令によって配光制御されるということも考えられる。
【0042】
本実施の形態では車両が自動運転モード、非自動運転モードにも対応できるよう外部照明装置1は図2に示すように主たる前照灯とは独立した照明装置として設置している。
自車、他車両車両の道路情報検出手段61,62として道路の状態を撮影するカメラ63と道路上に存在する車両等との距離を測定する為のレーザレーダ64が備わっている。
【0043】
自車、他車との情報交換手段 71,72としてアンテナ43が備わっており、これから発信される電波等を用いて、直接もしくは道路側の中継施設を通すなど間接的に自車他車間で情報をやりとりする。
車両位置検出手段41,42としてはGPS(Global Positioning System:衛星航法システム)からの信号を受信するため装置と受信されたGPS信号から位置情報を引き出すための地図データベースが車両内部に備わっている。
走行状態検出手段51,52としては車両の車速、舵角、方向指示器の動作状況を検出する。
【0044】
外部照明装置1の詳細な説明を図3から図5を用いて説明する。
図3は外部照明装置1全体の平面図、図4はランプ本体部11の一部正面図、図5はランプ本体部11の平面図。
ランプ本体11はレール12に沿って左右に移動することができる。制御装置2から出力された制御信号はコ−ドC1で各モ−タM1、M2、M3伝達され、ランプ本体11が求められた照射方向になるようにモータを駆動する。また、光源13を点灯するための照明電源と光源13はコ−ドC2で接続されて、制御手段2からの点灯指令を受けて電源がON、OFFされ、光源13が点灯、非点灯状態となる。なお、コ−ドC1および、コ−ドC2の長さはランプ本体11がレ−ル12の移動区間を動けるだけの余裕がある。
レール12の片側はベルトギアになっており、モータM3の軸に付けられたギアG1が回転することでランプ本体11が左右に動くことになる。また、モータM1によって軸15が回転しランプ本体11の光軸が左右に振れる。また、モータM2によって軸16が回転しランプ本体11の光軸が上下に振れる。
ランプ本体11の内部に光源13が存在し鏡体14がズームレンズとなっていて、光源13の光を適宜集光拡散している。
【0045】
次にフローチャートを用いて交差点での右左折時の処理について説明する。 処理全体の流れを図6のフローチャートを用いて説明すると、システムの稼働判断ステップ(以下、ステップをSと記す。)1、配光制御処理の継続判断S2、自車周囲にいる車両の検出S3、配光を制御する車両の決定S4、配光制御S5という具合に処理は流れていく。
【0046】
システムの稼働判断S1について図7のフローチャートを用いて説明する。処理が開始されると、自車の走行状態の検出S11を行い、自車が走行状態か否かの判断S12を行う。
走行状態であれば処理を続行し、走行状態でなければ処理は終了となる。処理が続行されれば配光制御の可・不可判断S13が行われ、S14で配光制御が可能であれば次の処理S2へと進む。S14で配光制御が不可の状態であれば処理は走行状態の検出S11へと戻る。
【0047】
走行状態の検出S11は図8のフローチャートに示すように、エンジンの起動状態を検出S111し、S112でエンジンが起動されていればS113で走行状態と判断し、S112でエンジンが起動されていなければS114で非走行状態と判断される。
【0048】
配光制御の可・不可判断S13は図9のフローチャートに示すように、配光制御モードのスイッチ状態を検出S131し、S132でスイッチがオンになっていればS133で配光制御可と判断し、S132でスイッチがオフになっていればS134で配光制御不可と判断される。
配光制御モードのスイッチとしては運転者自らが手動でオンオフできるスイッチのほか、非自動運転であることを認識すると配光制御モードになるという自動スイッチが考えられる。
【0049】
配光制御処理の継続判断S2について図10のフローチャートを用いて説明する。処理が開始されると、自車の車両位置の検出S21と走行道路の形態の検出S22とを行い、S23に進んで自車が現在いる地点が配光制御を必要とする場所か否かを判断して、配光制御を必要とする場所であれば、配光制御処理を継続するため次の処理S3へと進む。配光制御を必要としない場所であればシステムの稼働判断S1へと処理を戻す。
【0050】
車両の位置の検出S21は図11のフローチャートに示すように、GPSからの信号を受信S211し、受信した信号の中から受信位置の緯度経度の情報を抽出S212する。
【0051】
走行道路の形態の検出S22は図12のフローチャートに示すように、車両の位置の検出S21で抽出された自車の位置情報をもとに車両があらかじめ持っている地図データベースから、車両の現在地点における道路形状の照合を行うS221。車両の位置が緯度A、経度Bとなったとき、図13に示すように地図上では緯度A、経度Bの交点で車両の位置が示される。地図上で位置が示されたならば、地図に含まれる道路形状データから車両周辺の道路形状が特定できる。特定した道路形状から車両の位置が図13のC2のように交差点内である場合か、または、C1のように前方に交差点がある場合はS222またはS223からS224に進み自車の進路を算出し配光制御処理の継続・非継続の判断を行う。C3のように車両の位置が交差点内ではなく、前方に交差点がない場合はS222からS223、S225と進んで配光制御処理を非継続とする。
【0052】
自車の進路を算出し配光制御処理の継続・非継続の判断S224は図14のフローチャートに示すように、S2241で車載している地図データベースに目的地データが入力されていると、その入力されている目的地データと車両の現在位置データから目的地までの進路の算出S2242を行う。進路の算出を行った結果、現在走行中の交差点、もしくはこれから進入しようとする交差点で右折もしくは左折すると判断された場合はS2243からS2244へ進んで配光制御処理を継続する。S2241で目的地データがない場合やS2243で交差点を直進する場合はS2245に進んで配光制御処理は非継続とする。
【0053】
また、自車の進路を算出し配光制御処理の継続・非継続の判断S224は図15のフローチャートに示すような処理にすることもできる。
舵角の検出S2246と方向指示器の動作状態の検出S2247とを行い、これら2つの情報から車両の進行方向の予測S2248を行う。予測された進路から現在走行中の交差点、もしくはこれから進入しようとする交差点で右折もしくは左折すると判断された場合はS2243からS2244へ進んで配光制御処理を継続する。交差点を直進すると判断された場合はS2245へ進んで配光制御処理は非継続とする。
【0054】
また、自車の進路を算出し配光制御処理の継続・非継続の判断S224は図16のフローチャートに示すような処理にすることもできる。
S2241で車載している地図データベースに目的地データが入力されていると、その入力されている目的地データと車両の現在位置データから目的地までの進路の算出S2242を行う。進路の算出を行った結果、現在走行中の交差点、もしくはこれから進入しようとする交差点で右折もしくは左折すると判断された場合はS2243からS2244へ進んで配光制御処理を継続する。交差点を直進する場合はS2243からS2245へ進んで配光制御処理は非継続とする。S2241で目的地データがない場合は舵角の検出S2246と方向指示器の動作状態の検出S2247とを行い、これら2つの情報から車両の進行方向の予測S2248を行う。予測された進路から現在走行中の交差点、もしくはこれから進入しようとする交差点で右折もしくは左折すると判断された場合はS2243からS2244へ進み配光制御処理を継続する。交差点を直進すると判断された場合はS2245に進んで配光制御処理は非継続とする。
【0055】
自車周囲にいる車両の検出S3について図17のフローチャートを用いて説明する。処理が開始されると、自車に備え付けられた前方道路の状況を検出するカメラ63によって前方道路画像の撮影S31を行い、撮影された画像から車両の抽出S32を行う。その結果S33で車両が抽出されれば次の処理S4に進み、車両が抽出されなかった場合はシステムの稼働判断S1へと処理を戻す。
【0056】
また、自車周囲にいる車両の検出S3について図18のフローチャートに示すような処理をすることも可能である。処理が開始されると、他車との情報交換手段71が他車から発信される存在信号の監視S34を行い、その結果S35で他車からの存在信号が検出されれば次の処理S4に進み、他車からの存在信号が検出されなかった場合はシステムの稼働判断S1へと処理を戻す。
【0057】
配光制御する車両の決定S4について図19のフロチャートを用いて説明する。処理が開始されると、自車は他車に対して配光制御間合信号の発信S41を他車との情報交換手段71を通して行う。この間合信号を受けた他車は配光制御可否判断処理S42を行い、その結果を他車との情報交換手段71を通して自車に返してくる。他車からの可否判断信号を受信S43した結果、S45で配光制御が可能な状態であれば次の処理S5に進み、S45で配光制御が可能な状態でなければS46で他に検出された車両の有無を確認し、他に検出した車両があれば配光制御間合信号の発信S41へ処理を戻し、他に検出した車両がなければシステムの稼働判断S1へと処理を戻す。
【0058】
図20にかかる処理は他車側での処理となる。
他車の配光制御可否判断処理S42は図20のフローチャートに示すように配光制御が可能な状態かどうかの検出S421を行う。配光制御が可能な状態かどうかの検出S421は前記配光制御の可・不可判断S13と同様に図9のフローチャートに示すように配光制御モードのスイッチ状態を検出し(S131)、スイッチがオンになっていれば配光制御可と判断し、スイッチがオフになっていれば配光制御不可と判断される。配光制御モードのスイッチとしては運転者自らが手動でオンオフできるスイッチのほか、自動運転であることを認識すると配光制御モードになるという自動スイッチが考えられる。S422で配光制御が可能になっていれば車速の検出S423と車両の向きの検出S425とを行う。S424で車両が略停止状態であり、S426で他車が自車の方を向いていれば配光制御可能であると判断し、S427で自車との情報交換手段72を通して配光制御可能状態であることを自車に伝達する。配光制御が可能でないか、S424で車両が略停止状態でないか、S426で他車が自車の方を向いていないかのいずれかの場合であれば配光制御可能ではないと判断し、S428で自車との情報交換手段72を通して配光制御不可能状態であることを自車に伝達する。
【0059】
配光制御S5について図21のフローチャートを用いて説明する。処理が開始されると、他車の外部照明装置1によって光を照射したい照射範囲の算出S51を行う。算出された照射範囲を自車からの情報として他車との情報交換手段71を通して他車への伝達S52を行う。他車は自車から受け取った情報を元に配光制御処理S53を行い外部照明装置1の照射を行う。他車が配光制御処理S53を行った結果のフィードバック情報の受信S54を他車との情報交換手段71を通して行う。フィードバック情報を元にS55で他車が配光制御に成功したと判断した場合は終了判断S56を行い、他車が配光制御に成功しなかったと判断した場合は自車周囲にいる車両の検出S3へ処理を戻る。終了判断S56で判断した結果、配光制御を必要とする状況を抜けたと判断した場合はS57からS58へ進んで配光制御処理終了信号を他車との情報交換手段71を通して他車への伝達を行い、システムの稼働判断S1へと処理を戻す。終了判断S56で判断した結果、配光制御を必要とする状況を抜けていないと判断した場合はS57からS51へ戻って処理を照射範囲の算出に戻し、配光制御を必要とする状況を抜けるまで繰り返す。
【0060】
他車の外部照明装置1によって光を照射したい照射範囲の算出S51は図22のフローチャートに示すように自車の主前照灯の照度分布の算出S511を行う。図23に示すような前照灯の視認可能な照度での等照度曲線8をあらかじめデータとして自車が持っているか、自車の前照灯が配光制御可能なものであれば、前照灯に用いられている光源や反射板やレンズといった光学素子の特性から等照度曲線8を計算で求めてもよい。算出された自車の主前照灯の照度分布を地図データ上にマッピングS512を行う。照度分布をマッピングした地図データから自車の主前照灯の照射範囲にかからない場所の抽出S513を行う。抽出された領域を元に他車の外部照明装置1によって光を照射したい照射範囲の決定S514を行う。図24に示すように右折の場合には自車の主前照灯の照射範囲にかかっていない予想進路上の領域9を照射範囲として決定する。
【0061】
図25から図27のフローチャートに示す処理は他車側での処理となる。
配光制御処理S53は図25に示すように自車からの情報信号の検出S531を行い、S532で情報信号が検出されるまで情報信号の検出を繰り返す。自車からの情報信号を検出したらS533でその信号が終了信号か否かを判断する。終了信号でなければ配光制御による照射位置と他車の位置関係の検出S534を行う。
【0062】
検出された照射位置と他車の位置関係から照明装置の照射範囲・照射方向の算出S536を行う。算出された照射範囲・照射方向が制御可能か否かを自車との情報交換手段72を通して自車へのフィードバックS537を行う。S538で照射可能な値が算出されたのであれば照明装置が算出された照射範囲・照射方向に向くようにアクチュエータの起動S539を行いS5310で照明装置の照射もしくはすでに点灯しているのであれば照明装置の照射継続を行い、情報信号の検出S531へ処理が戻って自車からの情報信号を待ち受ける。情報信号の検出S531で検出された情報信号が終了信号と判断された場合は照明装置の照射の終了S535を行い、情報信号の検出S531へ処理が戻って自車からの情報信号を待ち受ける。また、照明装置の照射範囲・照射方向の算出S536によって得られた値が照射不可能な値であったならば算出した照射範囲・照射方向にすることなく、情報信号の検出S531へ処理が戻って自車からの情報信号を待ち受ける。
【0063】
照射位置と他車の位置関係の検出S534は図26のフローチャートに示すように他車の車両位置の検出S5341を行う。車両位置の検出S5341は前記車両の位置の検出S21と同様に図11のフローチャートに示すようにGPSからの信号を受信S211し、受信した信号の中から受信位置の緯度経度の情報を抽出S212する。また、自車からの情報信号から照射位置の情報の抽出S5342を行い、車両位置の検出S5341で検出された車両の位置と照射位置の情報の抽出S5342で抽出された照射位置を地図データ上にプロットS5344する。
【0064】
照明装置の照射範囲・照射方向の算出S536は図27のフローチャートに示すように車体の向きの検出S5361を行う。照射位置と他車の位置関係の検出S534で検出された照射位置と他車の位置関係と車体の向きの検出S5361で検出された車体の向きから照射方向と照射範囲を算出S5362する。算出方法を図28と図29を用いて説明する。領域9はS51で算出された他車の外部照明装置1によって光を照射したい照射範囲であり、他車および自車との情報交換手段71,72を用いて自車から他車へ情報信号によって位置データとして送信されている。領域9の略中心と外部照明装置1とを結ぶ線L2の方向が外部照明装置1の左右方向の光軸の向きとなる。また外部照明装置1から領域9の略中心を結ぶ線L21と外部照明装置1から鉛直に地面に降ろした点から領域9の略中心を通る線L22とがなす角度dが外部照明装置1の光軸の上下方向の向きとなる。また領域9の外側と外部照明装置1とを結んだ線L31及びL32によってできた角度Wが外部照明装置1の照射範囲となる。S5363で求められた照射範囲・照射方向が実際に外部照射装置によって可動できる範囲にあるかを判断して、可動できる範囲にあればS5364で照射可能と判断し、可動できる範囲からはずれている場合はS5365で照射不可能と判断される。
【0065】
終了判断S56は図30のフローチャートに示すように自車の位置情報をもとに車両があらかじめ持っている地図データベースから、車両の現在地点の道路形状の照合S561を行う。S562およびS563で照合した結果得られた道路形状から車両の位置が交差点内であるか、前方に交差点がある場合は配光制御を必要とする状況を抜けていないと判断し、S564で処理を継続とする。車両の位置が交差点内ではなく、前方に交差点がない場合は配光制御を必要とする状況を抜けたと判断し、S565で処理を終了とする。
【0066】
次に右左折時以外の処理について説明する。
図31(a)にすれ違いシーンでの状況、図31(b)に他車が駐停車車両である場合について図示している。いずれの場合も直線路での状況であるが、曲線路や交差点近辺での状況でもいずれも処理は同じになる。
すれ達いシーンでは自車他車ともに車両が動いており基本的には両車両とも主前照灯が照射されている。自車の照射範囲81、他車の照射範囲82とすると道路上は2つの前照灯のいずれかによって照射されている。よって他車の側方部の路側付近の領域91部分がこの状況においては他車の外部照明装置1によって照射したい領域といえる。
【0067】
次に他車が駐停車車両である場合は自車のみが主前照灯を照射していることになる。自車の前照灯は自車の走行車線を照射するのみである。よって他車側の車線、特に歩行者等が存在する可能性の高い路側付近の領域92部分がこの状況においては他車の外部照明装置1によって照射したい領域といえる。
【0068】
次にフローチャートを用いて処理の説明を行う。
図6から図11にかかる処理項目については右左折時の処理と同じなので説明を省略し、処理内容の相違点についてのみ説明する。
走行道路の形態の検出S22は図32のフローチャートに示すように車両の位置の検出S21で抽出された自車の位置情報をもとに車両があらかじめ持っている地図データベースから、車両の現在地点の道路形状の照合を行うS221。車両の位置が緯度A、経度Bとなったとき、図13に示すように地図上では緯度A、経度Bの交点で車両の位置が示される。地図上で位置が示されたならば、地図に含まれる道路形状データから車両周辺の道路形状が特定できる。S222で特定した道路形状から車両の位置が図13のC2のように交差点内である場合は自車の進路を算出し配光制御処理の継続・非継続の判断S224を行う。S222でC3のように車両の位置が交差点内ではない場合はS226で配光制御処理を継続とする。
【0069】
自車の進路を算出し配光制御処理の継続・非継続の判断S224は図33のフローチャートに示すように、S2241で車載している地図データベースに目的地データが入力されていると、S2242でその入力されている目的地データと車両の現在位置データから目的地までの進路の算出を行う。進路の算出を行った結果、S2249で現在走行中の交差点を直進すると判断された場合は、S2244で配光制御処理を継続する。S2241で目的地データがない場合やS2249で交差点を右折もしくは左折する場合は、S2245に進んで配光制御処理は非継続とする。
【0070】
また、自車の進路を算出し配光制御処理の継続・非継続の判断S224は図34に示すような処理にすることもできる。
舵角の検出S2246と方向指示器の動作状態の検出S2247とを行い、これら2つの情報から車両の進行方向の予測S2248を行う。S2249で予測された進路から現在走行中の交差点を直進すると判断された場合はS2244で配光制御処理を継続する。S2249で交差点を右折もしくは左折する場合はS2245に進んで配光制御処理は非継続とする。
【0071】
また、自車の進路を算出し配光制御処理の継続・非継続の判断S224は図35のフローチャートに示すような処理にすることもできる。
S2241で車載している地図データベースに目的地データが入力されていると、その入力されている目的地データと車両の現在位置データから目的地までの進路の算出S2242を行う。
【0072】
進路の算出を行った結果、S2249において現在走行中の交差点、もしくはこれから進入しようとする交差点を直進する場合は、S2244で配光制御処理を継続する。S2249で交差点を右折もしくは左折すると判断された場合は、S2245へ進んで配光制御処理は非継続とする。S2241で目的地データがない場合は舵角の検出S2246と方向指示器の動作状態の検出S2247を行い、これら2つの情報から車両の進行方向の予測S2248を行う。次にS2249へ進んで現在走行中の交差点を直進すると判断された場合は、S2244で配光制御処理を継続する。S2249で交差点を右折もしくは左折する場合は、S2245に進んで配光制御処理は非継続とする。
【0073】
図17から図19にかかる処理項目については右左折時の処理と同じなので説明を省略し、処理内容の相違点についてのみ説明する。
他車の配光制御可否判断処理S42は図36に示すように配光制御が可能な状態かどうかの検出S421を行う。配光制御が可能な状態かどうかの検出S421は前記配光制御の可・不可判断S13と同様に図9のフローチャートに示すように配光制御モードのスイッチ状態を検出S131し、スイッチがオンになっていれば配光制御可と判断し、スイッチがオフになっていれば配光制御不可と判断される。配光制御モードのスイッチとしては運転者自らが手動でオンオフできるスイッチのほか、自動運転であることを認識すると配光制御モードになるという自動スイッチが考えられる。S422で配光制御が可能になっていれば車両の向きの検出S425を行う。次にS426で他車が自車の方を向いていれば配光制御可能であると判断し、S427で自車との情報交換手段72を通して配光制御可能状態であることを自車に伝達する。S422で配光制御が可能でないか、S426で他車が自車の方を向いていないかのいずれかの場合であれば配光制御可能ではないと判断し、S428で自車との情報交換手段72を通して配光制御不可能状態であることを自車に伝達する。
【0074】
図21、図22と図25から図27にかかる処理項目については右左折時の処理と同じなので説明を省略し、処理内容の相違点についてのみ説明する。
終了判断S56は図37のフローチャートに示すように自車の車両位置の検出S566と他車の車両位置の検出S567とを行う。自車の車両位置の検出S566は前記車両の位置の検出S21と同様に図11のフローチャートに示すようにGPSからの信号を受信S211し、受信した信号の中から受信位置の緯度経度の情報を抽出S212する。次にS568で自車と他車の位置情報を車両があらかじめ持っている地図データベースにある地図データ上にプロットする。S569で、これにより得られた自車、他車の位置関係から自車から見て他車が自車よりも前方にある場合は、S5610に進んで配光制御を必要とする状況を抜けていないと判断し処理を継続とする。S569で自車から見て他車が自車よりも前方にない場合は、S5611に進んで配光制御を必要とする状況を抜けたと判断し処理を終了とする。
【0075】
他車の車両位置の検出S567は図38のフローチャートに示すようにレーザレーダ64で他車との距離の測定S5661を行い、次にS5662で自車と他車との相対位置から他車の位置を求める。
【0076】
また、他車の車両位置の検出S567は図39のフローチャートに示すように他車が他車の車両位置検出処理S5341で検出した車両位置をS5663で他車との情報交換手段71を通して自車が受信することによっても可能である。
【0077】
また、終了判断S56は図40のフローチャートに示すように自車に備え付けられた前方道路の状況を検出するカメラ63によって車両前方の画像の撮影S5612を行い、撮影された画像から他車の外部照明装置1の抽出S5613を行う。
【0078】
次にS5614で外部照明装置1が抽出されたならば自車から見て他車が自車よりも前方にあると判断でき、S5610へ進んで配光制御を必要とする状況を抜けていないと判断し処理を継続とする。S5614で外部照明装置1が抽出されなかったならば自車から見て他車が自車よりも前方にないと判断でき、S5611へ進んで配光制御を必要とする状況を抜けたと判断し処理を終了とする。
【0079】
【発明の効果】
以上説明してきたように、本発明によれば、自車以外の車両の外部照明装置の配光が制御可能な状態にある場合、自車の前照灯類によって照射することのできない範囲を補完的に他車の外部照明装置を用いて照射をし、自車の視認範囲拡大を行うことできるという効果がある。
【図面の簡単な説明】
【図1】本発明実施の形態に係る配光制御システムのブロック図である。
【図2】実施の形態の外部照明装置、カメラ、レーザレーダ、およびアンテナの車両における設置場所を示す斜視図である。
【図3】実施の形態の外部照明装置全体の平面図である。
【図4】実施の形態のランプ本体の一部正面図である。
【図5】実施の形態のランプ本体の平面図である。
【図6】実施の形態の処理全体の流れを示すフローチャートである。
【図7】システムの稼働判断フローチャートである。
【図8】走行状態の検出フローチャートである。
【図9】配光制御の可・不可判断フローチャートである。
【図10】配光制御処理の継続判断フローチャートである。
【図11】車両の位置の検出フローチャートである。
【図12】走行道路の形態の検出フローチャートである。
【図13】走行道路の形態の検出を説明する図である。
【図14】配光制御処理の継続・非継続の判断フローチャートである。
【図15】配光制御処理の継続・非継続の判断フローチャートである。
【図16】配光制御処理の継続;非継続の判断フローチャートである。
【図17】自車周囲にいる車両の検出フローチャートである。
【図18】自車周囲にいる車両の検出フローチャートである。
【図19】配光制御する車両の決定フローチャートである。
【図20】他車の配光制御可否判断処理フローチャートである。
【図21】配光制御フローチャートである。
【図22】照射範囲の算出フローチャートである。
【図23】照射範囲の算出を説明する図である。
【図24】照射範囲の算出を説明する図である。
【図25】配光制御処理フローチャートである。
【図26】照射位置と他車の位置関係の検出フローチャートである。
【図27】照明装置の照射範囲・照射方向の算出フローチャートである。
【図28】照明装置の照射範囲・照射方向の算出を説明する図である。
【図29】照明装置の照射範囲・照射方向の算出を説明する図である。
【図30】終了判断フローチャートである。
【図31】(a)すれ違いシーンでの状況を説明する図である。(b)他車が駐停車車両である場合を説明する図である。
【図32】走行道路の形態の検出フローチャートである。
【図33】配光制御処理の継続・非継続の判断フローチャートである。
【図34】配光制御処理の継続・非継続の判断フローチャートである。
【図35】配光制御処理の継続・非継続の判断フローチャートである。
【図36】他車の配光制御可否判断処理フローチャートである。
【図37】終了判断フローチャートである。
【図38】他車の車両位置の検出フローチャートである。
【図39】他車の車両位置の検出フローチャートである。
【図40】終了判断フローチャートである。
【符号の説明】
1 外部照明装置
2 制御手段
8 等照度曲線
9 領域
11 ランプ本体
12 レール
13 光源
14 鏡体
15 軸
16 軸
31 演算手段
32 演算手段
41 車両位置検出手段
42 車両位置検出手段
43 アンテナ
51 走行状態検出手段
52 走行状態検出手段
61 道路情報検出手段
62 道路情報検出手段
63 カメラ
64 レーザレーダ
71 他車との情報交換手段
72 自車との情報交換手段
81 自車の照射範囲
82 他車の照射範囲
91 路側付近の領域
92 路側付近の領域
Claims (32)
- 配光制御を指令する自車と、配光制御を指令される他車と、に設けられた配光制御システムであって、
前記配光制御を指令する自車が、車両位置検出手段と走行状態検出手段と道路情報検出手段と演算手段と車両同士が情報を相互に交換するための情報交換手段とを備え、前記車両位置検出手段と走行状態検出手段と道路情報検出手段とによって得られた各種情報を前記演算手段によって処理し、その結果得られた情報を前記配光制御を指令される他車へ情報を送信し、
前記配光制御を指令される他車が、車両位置検出手段と走行状態検出手段と道路情報検出手段と演算手段と車両同士が情報を相互に交換するための情報交換手段と搭乗者の視認に供しない外部照明装置と外部照明装置をコントロールするための制御装置とを備え、前記車両位置検出手段と走行状態検出手段と道路情報検出手段とによって得られた各種情報と配光制御を指令する自車から送信されてきた情報とを前記演算手段によって処理し、その情報をもとに前記制御装置を作動させ、前記外部照明装置の配光を制御することを特徴とする配光制御システム。 - 請求項1記載の配光制御システムは、
システムの稼働を判断する処理と、配光制御処理の継続を判断する処理と、配光制御を指令する自車の周囲に存在する他車を検出する処理と、配光を制御させる車両を決定する処理と、その配光を制御させる車両に備えられた外部照明装置の配光を制御する処理と、を備えることを特徴とする配光制御システム。 - 請求項2記載のシステムの稼働を判断する処理は、
前記配光制御を指令する自車の走行状態検出手段によって自車の走行状態を検出し、自車が走行状態でなければ処理を終了し、自車が走行状態であれば配光制御の可・不可判断を行い、配光制御が可能な状態であれば配光制御処理を行うことを特徴とする配光制御システム。 - 請求項3記載の自車の走行状態検出手段は、
前記自車のエンジンが起動しているかどうかを検出してエンジンが起動されていれば走行状態と判断し、エンジンが起動されていなければ非走行状態と判断することを特徴とする配光制御システム。 - 請求項3記載の配光制御の可・不可判断は、
この配光制御の可・不可判断に備えられた配光制御モードのスイッチの状態を検知して、スイッチがオンの状態であれば配光制御可と判断し、スイッチがオフの状態であれば配光制御不可と判断することを特徴とする配光制御システム。 - 請求項2記載の配光制御処理の継続を判断する処理は、
前記配光制御を指令する自車の車両位置検出手段によって自車の車両位置を検出する処理と、得られた自車の車両位置をもとに道路情報検出手段によって走行道路形態を検出する処理と、を備え、得られた走行道路の形態に応じて配光制御の処理を継続するかどうかを判断することを特徴とする配光制御システム。 - 請求項6記載の車両位置検出手段は、
GPSからの信号を受信する手段を備え、受信されたGPS信号から受信位置の緯度経度を抽出し、抽出された緯度経度情報を車両の位置とすることを特徴とする配光制御システム。 - 請求項6記載の道路情報検出手段によって走行道路形態を検出する処理は、
車両の位置を地図データに照合することにより、地図データから現在自車が走行している道路の形状を抽出し、現在配光制御を指令する自車が走行している道路が交差点内であるか前方に交差点がある場合は自車の進路を算出し配光制御処理の継続・非継続を判断する処理を行い、現在自車が走行している道路が交差点内ではなく、前方に交差点がない場合は配光制御処理を非継続とすることを特徴とする配光制御システム。 - 請求項8記載の配光制御を指令する自車の進路を算出し配光制御処理の継続・非継続を判断する処理は、
目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、目的地データがない場合もしくは交差点内を直進する場合においては配光制御処理を非継続とすることを特徴とする配光制御システム。 - 請求項8記載の配光制御を指令する自車の進路を算出し配光制御処理の継続・非継続を判断する処理は、
自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、交差点内を直進する場合においては配光制御処理を非継続とすることを特徴とする配光制御システム。 - 請求項8記載の配光制御を指令する自車の進路を算出し配光制御処理の継続・非継続を判断する処理は、
目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、目的地データがない場合は自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点、もしくはこれから走行しようとする交差点を右折もしくは左折すると判断された場合は配光制御処理を継続とし、交差点内を直進する場合においては配光制御処理を非継続とすることを特徴とする配光制御システム。 - 請求項2記載の配光制御を指令する自車の周囲に存在する他車を検出する処理は、
前記配光制御を指令する自車に設けられ自車の車両前方を撮像するカメラによって撮影された前方道路画像から自車以外の車両を抽出することによって他車を検出することを特徴とする配光制御システム。 - 請求項2記載の配光制御を指令する自車の周囲に存在する他車を検出する処理は、
自車以外の車両が存在信号を発信し、自車の情報交換手段によって自車以外の車両が発信した存在信号を検知することによって他車を検出することを特徴とする配光制御システム。 - 請求項2記載の配光制御を指令される車両を決定する処理は、
前記配光制御を指令する自車以外に検出された他車に対して、自車が情報交換手段によって配光制御可否問合信号を相手車両に発信し、相手車両側で配光制御可否判断処理が行われ、相手車両側で行われた配光制御可否判断処理の結果を受信し、受信された結果から相手車両側が配光制御可能か否かを判断することを特徴とする配光制御システム。 - 請求項14記載の相手車両側で行われる配光制御可否判断処理は、
前記車両が配光制御可能な状態になっているかどうかを判断し、配光制御可能な状態になっていれば、車速を検知し、車両の向きを検知し、検知された車速から車両が略停止状態であり、車体が配光制御を指令する自車の方を向いていると判断されたならば、自車に対して情報交換手段によって配光制御可能状態であることを伝達することを特徴とする配光制御システム。 - 請求項2記載の配光制御を指令される車両に備えられた外部照明装置の配光を制御する処理は、
前記配光制御を指令される他車のランプによって照射したい範囲を算出し、配光制御を指令する自車が持っている情報を他車に伝達し、伝達された情報を元に他車が配光制御処理を行い、処理の終了判断処理を行い、処理が終了と判断された場合は他車に対して配光制御処理終了を伝達することを特徴とする配光制御システム。 - 請求項16記載の配光制御を指令される他車のランプよって照射したい範囲を算出する処理は、
前記自車が現在照射している前照灯類の照度分布を算出し、地図情報上に照度分布をマッピングし、自車の前照灯類によって照射されていない範囲を抽出し、抽出された範囲をもとに照射位置を決定することを特徴とする配光制御システム。 - 請求項16記載の伝達された情報を元に配光制御を指令される車両が配光制御処理を行う処理は、
前記配光制御を指令する車両からの情報信号を検出し、検出された情報信号が終了信号でなければ、情報信号の中に含まれる照射位置と配光制御を指令される車両の位置関係とを検出し、外部照明装置の照射範囲、照射方向を算出し、算出された照射範囲、照射方向に外部照明装置が向くようにアクチュエータを起動し、外部照明装置を照射し、検出された情報信号が終了信号であれば外部照明装置の照射を終了することを特徴とする配光制御システム。 - 請求項18記載の情報信号の中に含まれる照射位置と配光制御を指令される車両の位置関係とを検出する処理は、
前記配光制御を指令される車両の位置を検出し、配光制御を指令する車両からの情報信号から照射位置の情報を抽出し、地図上に配光制御を指令される車両の位置と照射位置とをプロットすることを特徴とする配光制御システム。 - 請求項19記載の配光制御を指令される車両の位置を検出する処理は、
前記配光制御を指令する自車に備えられGPSからの信号を受信する手段によって受信されたGPS信号から受信位置の緯度経度を抽出し、抽出された緯度経度情報を車両の位置とすることを特徴とする配光制御システム。 - 請求項18記載の外部照明装置の照射範囲、照射方向を算出する処理は、
配光制御を指令される車両の車体の向きを検出し、車両位置と照射位置の位置関係と車体の向きとから外部照明装置の照射範囲と照射方向を算出することを特徴とする配光制御システム。 - 請求項16記載の処理の終了判断を行う処理は、
車両の位置を地図データに照合することにより、地図データから現在自車が走行している道路の形状を抽出し、現在配光制御を指令する自車が走行している道路が交差点内であるか前方に交差点がある場合は配光制御処理を継続とし、現在自車が走行している道路が交差点内ではなく、前方に交差点がない場合は配光制御処理を終了とすることを特徴とする配光制御システム。 - 請求項6記載の道路情報検出手段によって走行道路形状を検出する処理は、
車両の位置を地図データに照合することにより、地図データから現在自車が走行している道路の形状を抽出し、現在配光制御を指令する自車が走行している道路が交差点内である場合は自車の進路を算出し配光制御処理の継続・非継続を判断する処理を行い、現在自車が走行している道路が交差点内ではない場合は配光制御処理を継続とすることを特徴とする配光制御システム。 - 請求項23記載の配光制御を指令する自車の進路を算出し配光制御処理の継続・非継続を判断する処理は、
目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、目的地データがない場合もしくは交差点内を右折もしくは左折する場合においては配光制御処理を非継続とすることを特徴とする配光制御システム。 - 請求項23記載の配光制御を指令する自車の進路を算出し配光制御処理の継続・非継続を判断する処理は、
自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と、方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、交差点内を右折もしくは左折する場合においては配光制御処理を非継続とすることを特徴とする配光制御システム。 - 請求項8記載の配光制御を指令する自車の進路を算出し配光制御処理の継続・非継続を判断する処理は、
目的地データがある場合は現在地から目的地までの進路を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、目的地データがない場合は自車の舵角を検出し、自車の方向指示器の動作状態を検出し、検出された舵角と方向指示器の動作状態から自車の進行方向を算出し、算出された進路から現在走行している交差点を直進すると判断された場合は配光制御処理を継続とし、交差点内を右折もしくは左折する場合においては配光制御処理を非継続とすることを特徴とする配光制御システム。 - 請求項14記載の相手車両側で行われる配光制御可否判断処理は、
車両が配光制御可能な状態になっているかどうかを判断し、配光制御可能な状態になっていれば、車両の向きを検知し、車体が配光制御を指令する自車の方を向いていると判断されたならば、自車に対して情報交換手段によって配光制御可能状態であることを伝達することを特徴とする配光制御システム。 - 請求項16記載の処理の終了判断を行う処理は、
配光制御を指令する自車の位置を検出し、配光制御を指令される他車の位置を検出する処理を行い、地図情報上に自車と他車との位置をプロットし、地図情報上にプロットされた自車と他車との位置関係から他車が自車よりも前方に位置する場合は配光制御処理を継続とし、他車が自車よりも前方に位置しない場合は配光制御処理を終了とすることを特徴とする配光制御システム。 - 請求項28記載の配光制御を指令する自車の位置を検出する処理は、
前記配光制御を指令する自車に備えられGPSからの信号を受信する手段によって受信されたGPS信号から受信位置の緯度経度を抽出し、抽出された緯度経度情報を車両の位置とすることを特徴とする配光制御システム。 - 請求項28記載の配光制御を指令される他車の位置を検出する処理は、
配光制御を指令する自車に距離、方位測定手段を備え、この距離測定手段によって自車と他車との距離と方位を測定し、測定された他車との距離、方位から自車と他車との相対位置を求めることを特徴とする配光制御システム。 - 請求項28記載の配光制御を指令される他車の位置を検出する処理は、
他車が保持している他車の位置情報を情報交換手段によって受信することを特徴とする配光制御システム。 - 請求項16記載の処理の終了判断を行う処理は、
前記配光制御を指令する自車に設けられ自車の車両前方を撮像するカメラによって配光制御を指令される他車を撮影し、撮影された他車の画像から車両の外部照明装置部を抽出し、他車の外部照明装置が抽出できた場合は配光制御処理を継続とし、他車の外部照明装置が抽出できなかった場合は配光制御処理を終了とすることを特徴とする配光制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP23938198A JP3641945B2 (ja) | 1998-08-26 | 1998-08-26 | 配光制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP23938198A JP3641945B2 (ja) | 1998-08-26 | 1998-08-26 | 配光制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000062522A JP2000062522A (ja) | 2000-02-29 |
| JP3641945B2 true JP3641945B2 (ja) | 2005-04-27 |
Family
ID=17043946
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP23938198A Expired - Fee Related JP3641945B2 (ja) | 1998-08-26 | 1998-08-26 | 配光制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3641945B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4466607B2 (ja) | 2006-05-09 | 2010-05-26 | 株式会社デンソー | 車両用灯火管理システムおよび車両用灯火管理装置 |
| JP4240110B2 (ja) | 2006-10-31 | 2009-03-18 | トヨタ自動車株式会社 | 車両用照明装置、車両用照明制御方法、及び車両用照明制御プログラム |
| JP4661769B2 (ja) * | 2006-11-08 | 2011-03-30 | 株式会社デンソー | 前照灯スイブル制御装置 |
| KR101460724B1 (ko) * | 2012-03-19 | 2014-11-12 | 현대모비스 주식회사 | 자동차 및 자동차의 제어방법 |
| US11325524B2 (en) * | 2020-01-14 | 2022-05-10 | Qualcomm Incorporated | Collaborative vehicle headlight directing |
| US11872929B2 (en) | 2020-01-14 | 2024-01-16 | Qualcomm Incorporated | Collaborative vehicle headlight directing |
| CN118810607B (zh) * | 2024-09-18 | 2024-11-22 | 成都云智天下科技股份有限公司 | 一种基于环境感知的智能停车节能照明方法及系统 |
-
1998
- 1998-08-26 JP JP23938198A patent/JP3641945B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000062522A (ja) | 2000-02-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3184394B1 (en) | Driving support apparatus | |
| KR0185531B1 (ko) | 헤드 램프의 광 분배를 제어하기 위한 장치 | |
| CN102956116B (zh) | 用于突显汽车的期望的运动路径的方法和控制器 | |
| CZ20031238A3 (cs) | Vozidlo se zařízením pro vizuální signalizaci | |
| JP4367232B2 (ja) | 車両用照灯装置 | |
| US11433888B2 (en) | Driving support system | |
| EP2879912B1 (en) | System and method for controlling exterior vehicle lights responsive to detection of a semi-truck | |
| CN105593061B (zh) | 用于在快车道上控制外部车灯的系统和方法 | |
| JP2002193025A (ja) | 車両用前照灯装置 | |
| JP2000285394A (ja) | 車両の表示装置 | |
| JP4076670B2 (ja) | 自動追従走行システムにおけるライティング制御装置 | |
| JP2003072461A (ja) | 車両用前照灯光軸方向自動調整装置 | |
| CN111824004A (zh) | 车辆用配光控制装置 | |
| JP3641945B2 (ja) | 配光制御システム | |
| JP2007099078A (ja) | 車両用前照灯制御装置 | |
| KR101350306B1 (ko) | 차량의 충돌 방지 장치 | |
| US20240144699A1 (en) | Vehicle | |
| JP4492725B2 (ja) | ライト制御装置 | |
| KR20170070566A (ko) | 차량 및 그 제어 방법 | |
| US20220219678A1 (en) | Parking Assist Method and Parking Assist Apparatus | |
| JP2001091618A (ja) | 車両の制御装置 | |
| JP2006096158A (ja) | 車両用ヘッドライトの配光制御装置 | |
| KR20190000228A (ko) | 레이저 램프를 이용한 운전자 지원 장치 | |
| US12170022B2 (en) | Driving assistance apparatus | |
| JP2012101651A (ja) | 前照灯制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050104 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050117 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090204 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100204 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |