JP3663363B2 - パワーステアリング装置 - Google Patents
パワーステアリング装置 Download PDFInfo
- Publication number
- JP3663363B2 JP3663363B2 JP2001119515A JP2001119515A JP3663363B2 JP 3663363 B2 JP3663363 B2 JP 3663363B2 JP 2001119515 A JP2001119515 A JP 2001119515A JP 2001119515 A JP2001119515 A JP 2001119515A JP 3663363 B2 JP3663363 B2 JP 3663363B2
- Authority
- JP
- Japan
- Prior art keywords
- neutral position
- absolute neutral
- point
- absolute
- position signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
【発明の属する技術分野】
この発明は、ステアリングの絶対中立位置信号に応じてパワーシリンダのアシスト力を制御するパワーステアリング装置に関する。
【0002】
【従来の技術】
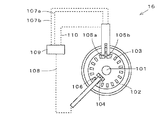
従来の操舵角検出機構として、特開平11−147480に記載されている操舵角検出機構が知られている。図9に示したこの相対的操舵角検出機構は、ステアリングシャフトの回転角度から、相対的に操舵角を検出するものである。
すなわち、ステアリングシャフト101に円盤状の回転板102を固定している。そしてこの回転板102には、その外周側の同心円上に、数度間隔で操舵角検出用孔103を形成している。また、この操舵角検出用孔103は、回転板102の全周にわたって、一定間隔に複数形成している。
そして、上記操舵角検出用孔103の内側に、中立位置検出用孔104を形成しているが、これは回転板102上に一つだけ形成されている。
【0003】
さらに、上記回転板102を挟んで対向する発光ダイオードとフォトトランジスタを有し、上記操舵角検出用孔103を認識する第1操舵角センサ105aおよび第2操舵角センサ105bと、上記中立位置検出用孔104を認識する中立位置センサ106とを設けている。上記第1操舵角センサ105aと第2操舵角センサ105bとは、隣り合う操舵角検出用孔103の間隔の半分のピッチで並んでいる。
そして、上記回転板102は、この第1操舵角センサ105aと第2操舵角センサ105b、および、中立位置センサ106に対して相対回転する。
【0004】
上記第1操舵角センサ105aと第2操舵角センサ105bとからの操舵角信号107aと107bとは、CPU109に入力される。このCPU109は、上記操舵角信号107aと107bとの位相差によって、初期位置からの相対的な操舵角を検出する。
また、CPU109には、中立位置センサ106による中立位置信号108と、図示しない車速センサからの車速信号が入力されるようにしている。
また、上記中立位置信号108は、ある一定の車速以上で走行しているとき、CPU109に入力されるようにしている。しかも、この中立位置信号108が一定時間継続して入力されたとき、絶対中立位置であると判断するようにしている。
さらに、上記絶対中立位置と、相対的な操舵角とから、絶対操舵角を決定するようにしている。そして、上記操舵角検出機構から出力される信号に基づいて、図示しないコントローラが、パワーシリンダへの供給流量を制御するようにしたパワーステアリング装置があった。
【0005】
【発明が解決しようとする課題】
上記相対的操舵角を検出する操舵角検出機構において、中立位置センサ106が中立位置検出用孔104を検出するのは、ステアリング操舵角が0度のときのほかに、この0度の位置から360度回転したときもある。なぜなら、ステアリングが360度回転したときには、回転板102も360度回転し、中立位置検出用孔104がまた中立位置センサ106に検出されてしまうからである。
このような操舵角検出機構では、CPU109には、現実の絶対中立位置と、その位置から360度回転した場合の3点における中立位置信号108が入力されることがあるが、上記CPU109は、その中で一定時間継続して中立信号が入力されたとき、それを、絶対中立位置と判断するようにしている。
このような操舵角検出機構を備えた自動車で、例えば高速道路への導入路のように一定角度のカーブが続いている道路を走行する。このカーブの角度によってはステアリングを360度回転させることもある。このようにステアリングを360度回転させて、その位置を保舵すると、上記従来の操舵角検出機構は、この360度の位置を絶対中立位置であると誤認してしまうこともあった。
【0006】
このように、CPU109が誤認した絶対中立位置信号に基づいて、コントローラが、パワーシリンダに対する制御を行った場合には、走行状態に応じた適切な制御を行うことができないことがある。
【0007】
そこで、上記操舵角検出機構において、コントローラが、新たな絶対中立位置信号を受信して、絶対中立位置を更新することが考えられる。このように、絶対中立位置が更新され、それに基づいてステアリングバルブへの供給流量を制御するときには、当然のことながら、絶対中立位置の更新前後でパワーシリンダの制御特性が変わってしまう。
このように、絶対中立位置信号に応じた制御特性でステアリングバルブの制御特性を補正し、それに応じた制御を行おうとした場合、急に補正すると、パワーシリンダの制御特性が急に変わってしまい、操舵に違和感が生じることが考えられる。
【0008】
この発明の目的は、走行中にコントローラに入力される絶対中立位置信号に基づいて制御特性を補正するときに、違和感のない操舵を可能とするパワーステアリング装置を提供することである。
【0009】
【課題を解決するための手段】
第1の発明は、車両走行中におけるステアリングホイールの見かけの絶対中立位置を随時検出して、その検出結果を絶対中立位置信号として出力する絶対中立位置検出機構と、ソレノイド電流指令値に応じてステアリングバルブへの供給流量を制御する油圧制御機構と、この油圧制御機構に対して絶対中立位置信号に応じた制御特性に基づいてソレノイド電流指令値を出力するコントローラとを備え、上記コントローラは、上記絶対中立位置検出機構から入力された絶対中立位置信号に応じた制御特性に基づくソレノイド電流指令値と現時点で採用している制御特性に基づくソレノイド電流指令値とを対比して、両者の値が等しいときに、新たに入力された絶対中立位置信号に応じた制御特性を採用し、両者の値が異なるときには上記現時点での制御特性を採用することを特徴とする。
【0010】
第2の発明は、上記第 1 の発明を前提とし、コントローラは、新たな絶対中立位置信号が入力されたとき、車速が一定速度以下であるかを判断し、車速が一定速度を超えている場合、現時点の制御特性を採用し、車速が一定速度以下である場合、新たに入力された絶対中立位置信号に応じた制御特性を採用することを特徴とする。
なお、現実の、ステアリングホイールの絶対中立位置とは、車両が直進状態を保つためのステアリングの位置のことであるが、上記絶対中立位置検出機構が出力する絶対中立位置信号に対応するものは、見かけの絶対中立位置として、上記現実の絶対中立位置と区別している。
【0011】
【発明の実施の形態】
図1〜8に示したのは、この発明の第1実施例である。この第1実施例において、操舵角検出機構16が絶対中立位置を検出する絶対中立位置検出機構を兼ねるようにしている。また、中立位置信号部として中立位置検出用孔104を、操舵角信号部として操舵角検出用孔103を、中立位置検出部として中立位置センサ106を、操舵角検出部として第1操舵角センサ105aおよび第2操舵角センサ105bを用いている。
さらに、上記操舵角検出機構16では、中立位置信号108をCPU109に入力するが、この中立位置信号108は、図示しない車速センサからの車速が約15km/h以上のとき入力するようにしている。
【0012】
上記操舵角検出機構16は、図1に示したものを一例として説明しているが、これに限らない。すなわち、操舵角、中立位置、見かけの絶対中立位置を検出することができ、これらの信号を出力できるものであれば、特にその構造は限定されない。
この第1実施例では、入力した中立位置信号108をこのときの操舵角によってそれぞれ識別して記憶するようにしている。そして、この識別した中立位置信号108の入力頻度によって絶対中立位置を決定し、この絶対中立位置を随時更新する。
なお、図9に示す従来例と同じ構成要素については、従来例と同じ符合を用いて説明する。
【0013】
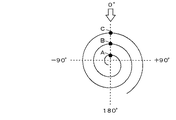
また、図2に示したのは、ステアリングの回転軌跡と中立位置の検出地点とを示した概念図である。この図2に示したように、ステアリングは、ステアリングの絶対中立位置から左右にそれぞれ約1回転半、回転するようにして使用している。また、図の矢印の位置に、ステアリングホイールの所定の位置が一致したときに、中立位置センサ106が中立位置検出用孔104を認識するようにしている。
上記矢印の位置で検出される中立位置には、ステアリングの回転角度が0度のときの点Bと、この点Bからステアリングを右に360度回転したときの点Aと、左に360度回転したときの点Cとの3点ある。このように、検出される中立位置は3点あるが、現実の絶対中立位置は、点Bのときである。
CPU109が、絶対中立位置を特定する方法を以下に説明する。ただし、CPU109は、上記点Bに対応する現実の絶対中立位置を、必ず特定できるのではなく、その時々で、更新可能な見かけの絶対中立位置を特定するのである。
【0014】
この実施例では、中立位置信号108による中立位置を、そのときの操舵角との関係によって、識別するようにしている。すなわち、先に述べたように、中立位置信号108は、操舵角0度のときと、それぞれ左右に360度回転したときとの3点で検出される。
ここでは、中立位置の検出を始めてから、最初に入力された中立位置信号108をx点での信号としてCPU109に記憶する。
そして、このx点とは別の位置、例えば、右に360度回転したときに入力された中立位置信号108をy点での信号としてCPU109に記憶する。さらに、上記x,y点とは別の位置、例えば、上記y点からさらに、360度回転したときに入力された中立位置信号108を点zとして記憶する。
【0015】
CPU109は、上記それぞれ入力される中立位置信号108と、それらの点から見か けの絶対中立位置を決定するが、その制御方法を図3のフローチャートにしたがって説明する。
制御を開始したら、ステップS1で、中立位置信号108とその点とを30秒間モニタリングする。そして、ステップS2で、その30秒間に受信した複数の中立位置信号108に対応する点のなかで、どの点の頻度が一番高いかを判断し、この最高頻度を有する点のデータを記憶する。このデータを地点データという。また上記、ステップS1とステップS2とで1セットとする。すなわち、図3の点線で囲った部分が1セットとなる。
例えば、上記ステップS1で、x点の信号が3回、y点の信号が7回、点zの信号が4回、それぞれCPU109に入力されたときには、ステップS2で最高頻度の地点データをy点と記憶する。
【0016】
そして、上記1セットの最高頻度を有する地点データが決定されたら、ステップS3でこの最高頻度の地点データが3セット分以上あるかどうかを判断する。上記地点データが3セット分未満のときには、ステップS1に戻る。そして、再度、中立位置データ108のモニタリングを行う。
一方、ステップS3で、地点データが3セット分以上あるときには、ステップS4に進む。
このステップS4では、それぞれのセットで決定された地点データを比較する。そして、ステップS5で、上記3セット分の地点データの中に同一の地点データが2つ以上あるかどうかを判断する。すなわち、1セット目の最高頻度を有する地点データがy点、2セット目がx点、3セット目がy点であったとすると、y点が2つある。したがって、ステップS5で同一の地点データが2つ以上あると判断し、ステップS6に進む。同一の地点データが2つ以上ないとき、すなわち、3セットの地点データすべてが異なる点を示したときには、ステップS1に戻る。そして、もう1セット分のモニタリングを行い、地点データを決定する。
【0017】
ステップS5で同一の地点データが2つ以上あると判断されたときには、ステップS6でその地点データで示された地点を見かけの絶対中立位置であると決定する。すなわち、ここでは、y地点を示す地点データが2つあるので、y点を見かけの絶対中立位置であると決定する。
上記のように、この実施例では、x点、y点、z点の3つの中立位置検出地点のうち、検出頻度の最も高い地点を見かけの絶対中立位置と決定し、対応する絶対中立位置信号を出力する。
【0018】
さらに、この実施例では、3セットのデータで上記見かけの絶対中立位置を、一旦決定した後も、中立位置を示す地点を検出し、その頻度を記憶する。そして、1セット分のデータと過去のデータとを比較して、決定した見かけの絶対中立位置を更新できるようにしている。一度決定した見かけの絶対中立位置が、現実の絶対中立位置と一致している場合も、していない場合も有るが、繰り返し、検出を続けて、更新していくうちに、現実の絶対中立位置と見かけの絶対中立位置とが一致する可能性が高くなる。
上記見かけの絶対中立位置を更新する方法を図4に示したフローチャートにしたがって説明する。
【0019】
上記図3で見かけの絶対中立位置を決定したら、図4のフローチャートに進む。すなわち、図3のXから図4のXへとつながるようにしている。この図4のXからステップS11に進み、このステップS11で4セット分以上の地点データがCPU109に入力されているかどうかを判断する。
そして、このデータが4セット分以上あるときには、ステップS12で最も古い地点データを消去してからステップS13に進む。一方、ステップS11で地点データが4セット分未満だったときには、そのままステップS13に進む。
このステップS13および次のステップであるステップS14において、新しい1セット分の地点データを検出する。
すなわち、ステップS13では、中立位置信号108を30秒間モニタリングするとともに、この中立位置信号108が入力された点を記憶する。そして、ステップS14で、どの点の頻度が、30秒間で一番高いかを決定し、これを地点データとして記憶する。
【0020】
このように、新しい地点データを検出したら、ステップS15で、この地点データと、前回絶対中立位置を決定したときに採用した地点データとが一致するかどうかを判断する。すなわち、前回絶対中立位置を決定したときに採用された地点データは、y点なので、新しい地点データが、y点と同じかどうかを判断する。
そして、一致すると判断されたときには、ステップS18に進み、絶対中立位置を更新しない。すなわち、新しい地点データもy点を示したときには、見かけの絶対中立位置を前回と同じy点と決定する。
【0021】
一方、上記ステップS15で、新しい地点データと、前回、採用した地点データとが異なると判断したときには、ステップS16に進む。
このステップS16では、記憶している過去2セット分の地点データの中に、新しい地点データと同一のデータがあるかどうかを判断する。そして、同一の地点データがあるときには、ステップS17でこの新しい地点データを採用して新しい見かけの絶対中立位置に対応する絶対中立位置信号を出力する。
【0022】
すなわち、前回、みかけの絶対中立位置を決定するために採用した地点データがy点であるが、それは、1セット目でy点、2セット目でx点、3セット目でy点であった。しかし、新しい1セット分の地点データはx点であったとする。この場合、過去2セットに新しい地点データx点と同じ地点データがあるので、この地点データx点を採用して、見かけの絶対中立位置を決定する。
上記ステップS17は、図7のYにつながる。
【0023】
また、上記ステップS16で過去2セット分の地点データの中に、新しい地点データと同一のデータがないと判断したときには、ステップ18でこの新しい地点データを消去する。そして、前回決定した見かけの絶対中立位置を更新しないで、前回、ステップS6で決定した絶対中立位置信号を出力する。
【0024】
また、この実施例では、上記図4に示した制御を繰り返しおこなうようにしている。したがって、常に新しい地点データと古い地点データを比較して、見かけの絶対中立位置を決定することができる。もし、走行初期の段階で、左右どちらかの操舵に偏ってしまい、見かけの絶対中立位置が、現実の絶対中立位置と異なって決定されたとしても、その後の制御の繰り返しで、これを更新することができる。したがって、走行時間が長くなればなるほど、見かけの絶対中立位置と現実の絶対中立位置とが食い違う可能性が低くなる。
さらに、上記の方法によれば、車速約15km/h以上で中立位置信号108を入力するようにしているので、走行中であれば、高速のときでも、低速のときでも、見かけの絶対中立位置を検出することができる。
【0025】
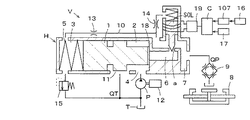
次に、上記操舵角検出機構16を装備したパワーステアリング装置の一実施態様を、図5に示す。
まず、図5に基づいて、このパワーステアリング装置全体の構成を説明する。
本体Hには、流量制御弁Vのスプール1とともにポンプPも一体的に組み込んでいる。
上記スプール1は、その一端を一方のパイロット室2に臨ませ、他端を他方のパイロット室3に臨ませている。上記一方のパイロット室2は、ポンプポート4を介してポンプPに常時連通している。また、他方のパイロット室3にはスプリング5を介在させている。このようにした両パイロット室2,3は、ソレノイドSOLの電流指令値Iに応じて開度を制御する可変オリフィスaを介して、たがいに連通している。
【0026】
すなわち、一方のパイロット室2は、流路6→可変オリフィスa→流路7を経由してパワーシリンダ8を制御するステアリングバルブ9の流入側に連通している。また、他方のパイロット室3は、流路10および流路7を介してステアリングバルブ9の流入側に連通している。
したがって、上記両パイロット室2,3は、可変オリフィスaを介して連通することになり、可変オリフィスaの上流側の圧力が一方のパイロット室2に作用し、下流側の圧力が他方のパイロット室3に作用することになる。
【0027】
そして、スプール1は、一方のパイロット室2の作用力と、他方のパイロット室3の作用力とがバランスした位置を保つが、そのバランス位置において、前記ポンプポート4とタンクポート11との開度が決められる。
今、エンジン等からなるポンプ駆動源12が停止していると、ポンプポート4に圧油が供給されない。ポンプポート4に圧油が供給されなければ、両パイロット室2,3には圧力が発生しないので、スプール1はスプリング5の作用で図示のノーマル位置を保つ。
【0028】
上記の状態からポンプPが駆動して、ポンプポート4に圧油が供給されると、可変オリフィスaに流れができるので、そこに差圧が発生する。この差圧の作用で、両パイロット室2,3に圧力差が発生し、この圧力差に応じてスプール1がスプリング5に抗して移動し、上記バランス位置を保つ。
このようにスプール1がスプリング5に抗して移動することによって、タンクポート11の開度を大きくするが、このときのタンクポート11の開度に応じて、ステアリングバルブ9側に導かれる制御流量QPと、タンクTあるいはポンプPに還流される戻り流量QTの分配比が決まる。言い換えれば、タンクポート11の開度に応じて制御流量QPが決まることになる。
【0029】
上記のように制御流量QPが、スプール1の移動位置で決まるタンクポート11の開度に応じて制御されるということは、結局は、可変オリフィスaの開度に応じて制御流量QPが決まることになる。なぜなら、スプール1の移動位置は、両パイロット室2,3の圧力差で決まるとともに、この圧力差を決めているのが可変オリフィスaの開度だからである。
【0030】
したがって、車速や操舵状況に応じて、制御流量QPを制御するためには、可変オリフィスaの開度、すなわちソレノイドSOLの励磁電流を制御すればよいことになる。
なぜなら、可変オリフィスaは、ソレノイドSOLが非励磁状態のときにその開度を最少に保ち、励磁電流を大きくしていくにしたがってその開度を大きくするからである。
【0031】
なお、前記ステアリングバルブ9は、図示していないステアリングホィールの入力トルク(操舵トルク)に応じて、パワーシリンダ8への供給流量を制御するものである。例えば、操舵トルクが大きければ、パワーシリンダ8への供給量を大きくし、操舵トルクが小さければそれに応じて供給流量も少なくするようにしている。この操舵トルクとステアリングバルブ9の切り換え量は、図示していないトーションバーなどのねじれ反力によって決まることになる。
【0032】
上記のように操舵トルクが大きいときに、ステアリングバルブ9の切り換え量を大きくすれば、その分、パワーシリンダ8によるアシスト力が大きくなる。反対に、ステアリングバルブ9の切り換え量を小さくすれば、上記アシスト力は小さくなる。
そして、操舵トルクによって決まるパワーシリンダ8の必要(要求)流量QMと、流量制御弁Vで決められる制御流量QPとを、等しくするようにすれば、ポンプP側のエネルギー損失を低く抑えることができる。なぜなら、ポンプP側のエネルギー損失は、制御流量QPとパワーシリンダ8の要求流量QMとの差によって発生するからである。
【0033】
上記のように制御流量QPを、パワーシリンダ8の要求流量QMにできるだけ近づけるために、可変オリフィスaの開度を制御するのが、ソレノイドSOLに対する励磁電流であり、この励磁電流を制御するのが、コントローラcである。
このコントローラcには、操舵角検出機構16を接続するとともに、このコントローラcには、上記操舵角検出機構16から信号が出力される。さらに、上記コントローラcには、車速センサ17を接続し、車速信号が入力されるようにしている。そして、これら両出力信号に基づいて、ソレノイドSOLの励磁電流を制御するようにしている。
【0034】
なお、図中符号18はスプール1の先端に形成したスリットで、スプール1が図示の位置にあるときにも、一方のパイロット室2が、このスリット18を介して、流路7に常時連通するようにしている。言い換えると、スプール1が図示の状態にあって、流路6を閉じているようなときにも、ポンプPの吐出油が、このスリット18を介して、ステアリングバルブ9側に供給されるようにしている。
このように微少流量であるが、ステアリングバルブ9側に圧油を供給するようにしたのは、装置全体の焼き付きの防止、キックバック等の外乱の防止、および応答性の確保を目的にしているからである。
また、符号19は、コントローラcとソレノイドSOLとの間に接続したソレノイドSOLの駆動装置である。
【0035】
上記コントローラcには、操舵角検出機構16からの操舵角信号および絶対中立位置信号と、車速センサ17からの車速信号とが入力される。そして、コントローラcは、操舵角信号から操舵角と操舵角速度とを演算し、これらに基づいてソレノイドSOLの電流指令値である励磁電流を決めて上記駆動装置19を介してソレノイドSOLを制御するようにしている。
【0036】
【0037】
【0038】
【0039】
上記のような、上記コントローラcの制御システムにおいて、先に説明したようにこのコントローラcには操舵角検出機構16から出力される絶対中立位置信号が入力されるようにしている。そして、この絶対中立位置信号を基にして、上記コントローラcがソレノイド電流指令値を決定している。したがって、図4で説明したように、操舵角検出機構16で検出した絶対中立位置が更新されれば、すなわち、新しい絶対中立位置信号がコントローラcに対して出力され、それに基づいた制御を行うようにすれば、コントローラcの制御特性が異なり、上記ソレノイド電流指令値が異なる。
しかし、操舵角検出機構16から、前回出力された絶対中立位置信号とは異なる絶対中立位置信号が新しく出力され、この新しい信号をそのままコントローラcの制御特性に反映させると、ステアリングホィールの操舵に違和感が生じてしまう。
【0040】
この理由を、図6を用いて説明する。この図6は、上記操舵角検出機構16から出力された絶対中立位置信号に基づくソレノイド電流指令値I1を示している。また、点線は更新前の絶対中立位置信号に応じた制御特性を表し、実線は更新後の絶対中立位置信号に応じた制御特性を表している。
いま、更新前の絶対中立位置に基づいて図6の現在点αのソレノイド電流指令値を出力している。この状態で、絶対中立位置信号が更新されると、新たな絶対中立位置信号に応じた実線の制御特性を採用することになり、ソレノイド電流指令値は、実線上の予測点βに補正されることになる。しかし、急に点αから点βに補正すると、ソレノイド電流指令値が急に大きくなり、その結果、ステアリングホィールに対するアシスト力が大きくなり、これが突然軽くなってしまう。
これとは反対に、上記電流指令値の補正によってステアリングホィールが重くなってしまうようなことも同様に起こり得る。
このように、絶対中立位置信号の更新を急に採用し、この更新に基づいてソレノイド電流指令値を出力すると、このステアリングホィールの操舵に違和感が生じてしまうことがある。
【0041】
そこで、この違和感を解消するために、コントローラcは図3,4に示した絶対中立位置信号の更新制御ののち、図7に示したような制御をおこなう。すなわち、図4のYと図7のYとがつながるようにして、YからステップS21に進む。
すなわち、ステップS21でコントローラcに操舵角検出機構16から絶対中立位置信号が入力される。さらに、ステップS22で、更新された絶対中立位置信号が入力される。更新された絶対中立位置信号が入力されたら、ステップS23でコントローラcは、現在の絶対中立位置信号に基づいたソレノイド電流指令値I1と、更新後に予測されるソレノイド電流指令値I1とを比較する。すなわち、図6の現在点αと予測点βとを比較する。そして、現在点α=予測点βかどうかを判断する。
【0042】
なお、この第1実施例のパワーステアリング装置において、操舵角θおよび操舵角速度ωが、ある設定値以上にならなければ、上記ソレノイド電流指令値I1としてゼロを出力するようにしている。そのため、更新前の絶対中立位置と更新後の絶対中立位置とが一致する点というのは、図6に示したようにそれぞれの電流指令値の最大域にある点γである。したがって、現在点α=予測点βとなるのは現在点αがソレノイド電流指令値I1の最大域に達したときである。
【0043】
上記ステップS23で現在点αと予測点βが同じ電流指令値であった場合、すなわち現在点αがソレノイド電流指令値I1の最大域に達しているときには、ステップS24で更新された絶対中立位置信号に基づいた制御をおこなう。すなわち図6の実線で示した制御をおこなう。
一方、上記ステップS23で現在点αと予測点βとが一致しないと判断した場合、ステップS25に進み、現在の絶対中立位置に基づいた制御を続ける。すなわち、図6の点線で示した制御をおこなう。
上記ステップS23では、常に現在点αと予測点βとの判断をおこなっている。したがって、現在点αと予測点βとが一致すると、すぐに更新後の絶対中立位置に基づいた制御をおこなうことができる。
【0044】
このように、現在点αと予測点βとが一致してから、更新後の絶対中立位置に基づいた制御をおこなうようにしているので、例えば図6の点αから点βへと、いきなりシフトしてしまうことがない。この実施例によれば、点γまでは現在の点線で示された制御をおこない、点γからは更新された実線で示された制御をおこなうようにしている。
したがって、絶対中立位置が更新されても、ステアリングホィールの操舵に違和感が生じることなく、更新後の絶対中立位置信号に基づいたソレノイド電流指令値I1にすることができる。
【0045】
【0046】
【0047】
【0048】
【0049】
【0050】
【0051】
【0052】
【0053】
【0054】
【0055】
【0056】
【0057】
【0058】
【0059】
【0060】
【0061】
【0062】
【0063】
【0064】
【0065】
【0066】
【0067】
【0068】
【0069】
【0070】
【0071】
【0072】
この第1実施態様によれば、絶対中立位置検出機構である操舵角検出機構16が、上記絶対中立位置を判断し、コントローラcがこれを更新するときには、現在点αと予測点βとが一致してから、更新後の絶対中立位置信号に基づいた制御をおこなうようにしているので、例えば図6の点αから点βへと、いきなりシフトしてしまうことがない。したがって、絶対中立位置が更新されても、ステアリングホィールの操舵に違和感が生じるこなく、更新後の絶対中立位置信号に基づいたソレノイド電流指令値I1にすることができる。
【0073】
次にこの発明の第2実施例について説明する。この発明の第2実施例は、コントローラcが操舵角検出機構16から入力される絶対中立位置信号を更新するとき、車速を考慮することを最大の特徴とする。このほかの構成要素は第1実施例と同様である。この第1実施例と同様の構成要素については、第1実施例と同じ符号を用い、その詳細な説明を省略する。
【0074】
図8は、この第2実施例のコントローラcによる制御フローチャートを示したものである。この第2実施例では第1実施例の図4のYから図8のYへとつながるようにしている。この図8のフローチャートにおいて、YからステップS31に進む。ステップS31でコントローラcに操舵角検出機構16から絶対中立位置信号が入力される。さらに、ステップS32で、更新された絶対中立位置信号が入力される。更新された絶対中立位置信号が入力されたら、ステップS33でコントローラcは、現在の絶対中立位置信号に応じた制御特性に基づくソレノイド電流指令値I1と、更新後のソレノイド電流指令値に応じた制御特性に基づくソレノイド電流指令値I1とを比較する。すなわち、図6の現在点αと予測点βとを比較する。そして、現在点α=予測点βかどうかを判断する。
【0075】
上記ステップS33で現在点αと予測点βが同じ電流指令値であった場合、すなわち現在点αが電流指令値の最大域に達しているときには、ステップS34に進む。
一方、上記ステップS33で現在点αと予測点βとが一致しないと判断した場合、ステップS35に進み、現在の絶対中立位置に基づいた制御を続ける。すなわち、図6の点線で示した制御特性で制御をおこなう。
【0076】
上記ステップS34では、車速センサ17から入力される車速信号によって、この車速が一定以下かどうかを判断する。
車速が一定以下のときステップS36で更新された絶対中立位置信号に応じた制御特性による制御をおこなう。すなわち図6の実線で示した制御をおこなう。
一方、上記ステップS34で、車速が一定以下でないときには、上記ステップS35に進み、更新前の絶対中立位置信号に基づいて制御をおこなう。
【0077】
このように、コントローラcが更新後の絶対中立位置信号を採用するか、あるいは更新前の絶対中立位置信号を採用するかを決定するのに、ソレノイド電流指令値の現在点αと予想点βとを比較するほかに、車速をも考慮するようにしたのは、以下の理由からである。
【0078】
すなわち、絶対中立位置信号を更新した場合、更新後にアシスト力の絶対中立位置そのものが更新されることから、更新前後のハンドル舵角で、操舵時の違和感がない程度にアシスト力が変化する場合がある。
そこで、このような更新前後でのアシスト力の変化を防止するために、絶対中立の更新を一定車速以下で実行することとした。
【0079】
このような第2実施例によれば、絶対中立位置が更新されても、ある一定以下の車速でのみ、その更新を実行するという制限を追加したことでステアリングホィールの操舵に違和感が生じるこなく、更新後の絶対中立位置信号に基づいたソレノイド電流指令値I1にすることができ、しかも、より一層安全な制御をおこなうことができる。
【0080】
【発明の効果】
第1の発明によれば、コントローラは、絶対中立位置信号を随時受信するとともに、絶対中立位置信号が更新されたとき、現在のソレノイド電流指令値と、更新された絶対中立位置信号に対応する制御特性を採用したときに予測されるソレノイド電流指令値とを比較し、現在のソレノイド電流指令値と予測されるソレノイド電流指令値とが等しくない場合、更新前の絶対中立位置信号を採用し、上記現在ソレノイド電流指令値と予測されるソレノイド電流指令値とが等しい場合、更新された絶対中立位置信号を採用することとしたので、絶対中立位置信号に応じた制御特性を補正するとき違和感のない操舵を可能とすることができる。
【0081】
第2の発明によれば、コントローラは、絶対中立位置信号が更新されたとき、車速が一定速度以下であるかを判断し、車速が一定速度を超えている場合、更新前の絶対中立位置信号を採用し、車速が一定速度以下である場合、更新された絶対中立値信号を採用することとしたので、絶対中立位置が更新されても、ステアリングホィールの操舵に違和感が生じるこなく、しかも、より一層安全な制御をおこなうことができる。
【図面の簡単な説明】
【図1】 第1実施例の操舵角検出機構の概略図である。
【図2】 操舵角検出機構の概念図である。
【図3】 絶対中立位置を決定するまでの制御フローチャートである。
【図4】 絶対中立位置更新可否決定までの制御フローチャートである。
【図5】 制御システムの一実施態様を示した図である。
【図6】 電流指令値I1の更新方法を示した図である。
【図7】 第1実施例の絶対中立位置信号入力後の制御フローチャートである。
【図8】 第2実施例の絶対中立位置信号入力後の制御フローチャートである。
【図9】 従来の操舵角検出機構を示した概略図である。
【符号の説明】
8 パワーシリンダ
c コントローラ
16 操舵角検出機構
108 中立位置信号
Claims (2)
- 車両走行中におけるステアリングホイールの見かけの絶対中立位置を随時検出して、その検出結果を絶対中立位置信号として出力する絶対中立位置検出機構と、ソレノイド電流指令値に応じてステアリングバルブへの供給流量を制御する油圧制御機構と、この油圧制御機構に対して絶対中立位置信号に応じた制御特性に基づいてソレノイド電流指令値を出力するコントローラとを備え、上記コントローラは、上記絶対中立位置検出機構から入力された絶対中立位置信号に応じた制御特性に基づくソレノイド電流指令値と現時点で採用している制御特性に基づくソレノイド電流指令値とを対比して、両者の値が等しいときに、新たに入力された絶対中立位置信号に応じた制御特性を採用し、両者の値が異なるときには上記現時点での制御特性を採用することを特徴とするパワーステアリング装置。
- コントローラは、新たな絶対中立位置信号が入力されたとき、車速が一定速度以下であるかを判断し、車速が一定速度を超えている場合、現時点の制御特性を採用し、車速が一定速度以下である場合、新たに入力された絶対中立位置信号に応じた制御特性を採用することを特徴とする請求項1記載のパワーステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001119515A JP3663363B2 (ja) | 2001-04-18 | 2001-04-18 | パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001119515A JP3663363B2 (ja) | 2001-04-18 | 2001-04-18 | パワーステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002308135A JP2002308135A (ja) | 2002-10-23 |
| JP3663363B2 true JP3663363B2 (ja) | 2005-06-22 |
Family
ID=18969726
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001119515A Expired - Fee Related JP3663363B2 (ja) | 2001-04-18 | 2001-04-18 | パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3663363B2 (ja) |
-
2001
- 2001-04-18 JP JP2001119515A patent/JP3663363B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002308135A (ja) | 2002-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPH04159178A (ja) | 車両用ステアリング制御装置 | |
| JPS58161667A (ja) | パワ−ステアリングの操舵力制御装置 | |
| JP2507598B2 (ja) | 中立舵角推定装置 | |
| US5337850A (en) | Rear wheel steering control system for automotive vehicles | |
| JP2502745B2 (ja) | 中立舵角推定装置 | |
| JPH0256274B2 (ja) | ||
| JPS60255576A (ja) | 動力舵取装置の操舵力制御装置 | |
| JP3468065B2 (ja) | 車両のヨーレート制御装置 | |
| JPS6371482A (ja) | 動力舵取装置の操舵力制御装置 | |
| JPS63188570A (ja) | パワ−ステアリングの油圧制御装置 | |
| JP3663363B2 (ja) | パワーステアリング装置 | |
| JPH11334623A (ja) | 弁の特性線に影響を与える方法 | |
| JPH0676065B2 (ja) | 動力舵取装置の操舵力制御装置 | |
| GB2452277A (en) | Vehicle steering control system | |
| JPH06227283A (ja) | 車両の自動走行制御装置 | |
| JP3625420B2 (ja) | 操舵角検出機構および操舵角検出機構を備えたパワーステアリング装置 | |
| JPS59220455A (ja) | パワ−ステアリング装置のセルフセンタリング機構 | |
| JP3624152B2 (ja) | 操舵角検出機構 | |
| JPS59143769A (ja) | 車両の4輪操舵装置 | |
| JP4577512B2 (ja) | 油圧パワーステアリング装置 | |
| JP3860997B2 (ja) | パワーステアリング装置 | |
| JP3015830B2 (ja) | 油圧式動力舵取装置 | |
| US12479500B2 (en) | Hydraulic steering system | |
| JPH04123980A (ja) | 舵角制御装置 | |
| JP4566040B2 (ja) | パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20041207 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050301 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050328 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080401 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080401 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080401 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090401 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090401 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100401 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100401 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110401 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110401 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120401 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130401 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130401 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140401 Year of fee payment: 9 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |