JP3663788B2 - 内燃機関のバルブタイミング制御装置 - Google Patents
内燃機関のバルブタイミング制御装置 Download PDFInfo
- Publication number
- JP3663788B2 JP3663788B2 JP33608096A JP33608096A JP3663788B2 JP 3663788 B2 JP3663788 B2 JP 3663788B2 JP 33608096 A JP33608096 A JP 33608096A JP 33608096 A JP33608096 A JP 33608096A JP 3663788 B2 JP3663788 B2 JP 3663788B2
- Authority
- JP
- Japan
- Prior art keywords
- engine
- fuel
- valve timing
- valve
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/0002—Controlling intake air
- F02D2041/001—Controlling intake air for engines with variable valve actuation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/12—Improving ICE efficiencies
Landscapes
- Output Control And Ontrol Of Special Type Engine (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
- Valve-Gear Or Valve Arrangements (AREA)
- Valve Device For Special Equipments (AREA)
Description
【発明の属する技術分野】
本発明は、内燃機関の運転状態に応じて機関のバルブタイミングを変更し、機関の吸気弁と排気弁とのバルブオーバラップ量を制御するバルブタイミング制御装置に関する。
【0002】
【従来の技術】
従来より、内燃機関の回転数、負荷等の運転状態に応じて吸排気弁の開閉タイミング(バルブタイミング)を変更し、各運転状態における出力や燃費の向上を図るバルブタイミング制御装置が知られている。
この種のバルブタイミング制御装置では、バルブタイミングを変更することにより吸気弁と排気弁との両方が同時に開弁している期間(以下、この期間の長さを「バルブオーバラップ量」と称する)を最適値に設定し、各運転状態における機関性能を向上させている。
【0003】
この種のバルブタイミング制御装置の例としては、例えば特開平4−194331号公報に記載されたものがある。
同公報の装置は、機関運転状態に応じてバルブタイミングの切換を行い、低回転低負荷運転時にはバルブオーバラップ量を小さく設定し、更に機関温度が低い冷間運転時には全運転領域でバルブオーバラップ量を小さく設定するようにしたものである。
【0004】
一般に、バルブオーバラップ量を大きく設定すると排気行程時に排気弁とともに吸気弁が開弁している期間が長くなり、気筒内の既燃ガスが吸気ポートに逆流する、いわゆる既燃ガスの吹き返しが生じやすくなる。特に、機関の低負荷運転時にはスロットル弁開度が小さく吸気ポート負圧が大きく(すなわち吸気ポート内の絶対圧力が低く)なっているため、バルブオーバラップがあると既燃ガスの吹き返しが生じやすくなる。
【0005】
吸気ポートへの既燃ガスの吹き返しの量が大きいと、吸気ポートに逆流した既燃ガスが吸気行程時に気筒内に再吸入されることにより、気筒に供給される新気の量が低下する問題(内部EGR量の増大)が生じる他、特に機関温度が低い場合には吸気ポートに供給された燃料のうち吸気ポート壁面に付着する燃料(壁面付着燃料)の量が増大するため十分な量の燃料が気筒に供給されなくなる問題が生じる。
【0006】
すなわち、機関温度が低い場合には、吸気ポートに供給された燃料は蒸発しにくいため、吸気ポート内に比較的大きな液体燃料粒子を形成している。この状態で吸気ポートに既燃ガスが逆流すると、吸気ポート内の燃料粒子が吹き戻されて壁面に付着してしまう。また、機関温度が低い程、すなわち燃料の気化状態が悪い程壁面に付着する燃料の量は増大するようになる。このため、低温時に既燃ガスの吹き返しが生じると燃料の壁面付着のため気筒に十分な燃料が供給されず、冷間ヘジテーション(いわゆる低温加速時のもたつき)が生じたり、内部EGR量の増大により燃焼が不安定になったりする問題がある。
【0007】
上記特開平4−194331号公報では、吸気ポート負圧が大きく吹き返しが生じやすい低回転低負荷運転時には、バルブオーバラップ量を小さくして既燃ガスの吹き返しを低減し、内部EGR量の増大による燃焼の悪化を防止するとともに、更に、機関温度が低い冷間運転時には全運転領域でバルブオーバラップ量を小さくし、既燃ガスの吹き返しによる壁面付着燃料の量を低減するようにしている。
【0008】
上述のように、上記公報の装置では、低温時の内部EGR量の低減による燃焼の安定及び、低温時の壁面付着燃料の低減による冷間ヘジテーションの防止のために機関低温時には高温時に較べてバルブオーバラップ量を小さく設定している。
また、上記以外にも、機関低温時にはバルブタイミングを変更する可変バルブタイミング機構の作動速度が低下し、運転条件の変化によっては機関の失火等が生じやすくなる問題がある。すなわち、低温時には各部のフリクションの増大や作動油の粘性増大のため可変バルブタイミング機構の作動速度は遅くなる。このため、機関低温時にはバルブオーバラップ量を運転条件に適した大きさに変更するのに要する時間が長くなり。最適バルブオーバラップ量と実際のバルブオーバラップ量との間に一時的に差が生じるようになる。この場合、最適値よりもバルブオーバラップ量が小さい場合には機関出力が低下する問題はあるものの機関の運転上大きな問題は生じない。しかし、最適値に対してバルブオーバラップが過度に大きい場合には失火が生じてしまい、極端な場合には機関の運転が不可能になる場合がある。このため、通常は機関低温時にはバルブオーバラップ量を高温時よりも小さく設定して、可変バルブタイミング機構の作動速度が低下しても実際のバルブオーバラップ量が最適値より過度に大きくなることがないようにして、低温時の失火を防止することがおこなわれている。
【0009】
すなわち、従来、▲1▼内部EGRの低減、▲2▼壁面付着燃料の低減、▲3▼可変バルブタイミング機構の作動速度の遅れによる失火の防止、を目的として機関低温時にはバルブオーバラップ量を機関高温時より小さく設定することが行われていた。
【0010】
【発明が解決しようとする課題】
ところが、バルブタイミングを変更することにより気筒のバルブオーバラップ量を変更するバルブタイミング制御装置で上記公報の装置のように機関低温時に一律にバルブオーバラップを小さくする制御を行うと、低温時に機関性能が大きく低下する問題がある。バルブタイミングを変更することによりバルブオーバラップ量を変更する場合には、通常バルブの開弁期間は一定に維持される。すなわち、吸気弁の開閉タイミングを変更してバルブオーバラップを制御する場合を例にとって考えると、吸気弁の開閉タイミングを早くする(進角させる)程バルブオーバラップ量は増大し、遅くする程(遅角させる程)バルブオーバラップは減少する。このため、バルブタイミングを制御してバルブオーバラップ量を変更する場合には、バルブオーバラップ量を小さく設定すると吸気弁の閉弁タイミングも同時に遅くなり、吸気弁が気筒の吸気行程終了後圧縮行程中に閉弁するようになってしまう。このように、吸気弁の閉弁時期が圧縮行程にかかるようになると、一旦気筒内に吸入された吸気が圧縮行程時に吸気弁から吸気ポートに押し戻されるようになり気筒の吸気体積効率が低下してしまう問題が生じる。特に、機関低回転時には、吸気慣性による過給効果が殆ど得られないため吸気弁の閉弁時期が遅くなると吸気体積効率の低下による機関出力の減少も大きくなる。
【0011】
一方、例えば、壁面付着燃料について考えると、機関低温時においても、燃料の気化状態が良好であれば多少バルブオーバラップによる既燃ガスの吹き返しがあっても燃料の壁面付着は生じにくい。このため、機関低温時であっても、気化状態の良好な軽質燃料を使用している場合には、気化状態の悪い重質燃料を使用する場合に較べてバルブオーバラップ量を増大することができるはずである。
【0012】
また、可変バルブタイミング機構のフリクションが少ない場合や、作動油として粘性の低い油を使用する等により、低温であっても可変バルブタイミング機構の作動速度が高い場合には、作動速度が低い場合に較べて低温時のバルブオーバラップを大きく設定しても失火等が生じることはないはずである。
このため、前記特開平4−194331号公報の装置のように、機関低温時に一律にバルブオーバラップ量を小さく設定していたのでは、運転条件によっては本来必要がないにもかかわらずバルブオーバラップ量を小さく設定し、機関出力を低下させた運転を行うことになる場合がある。
【0013】
本発明は上記問題に鑑み、バルブタイミングを変更することによりバルブオーバラップ量を調節する場合に、機関低温時であってもバルブオーバラップ量の低減を最小限にとどめ、従来機関出力の低下を生じていた条件での機関出力を向上させることが可能なバルブタイミング制御装置を提供することを目的としている。
【0014】
【課題を解決するための手段】
請求項1に記載の発明によれば、内燃機関のバルブタイミングを変更することにより、内燃機関の運転状態に応じて機関のバルブオーバラップ量を調節し、機関低温時に機関高温時に較べて機関のバルブオーバラップ量を小さく設定するバルブタイミング制御装置において、バルブタイミング変更時のバルブタイミング変化速度を検出する作動速度検出手段と、機関低温時のバルブオーバラップ量を、前記バルブタイミング変化速度が大きいときに前記バルブタイミング変化速度が小さいときより大きくなるように補正する作動速度補正手段と、を備えた内燃機関のバルブタイミング制御装置が提供される。
【0015】
請求項2に記載の発明によれば、更に、機関回転数を検出する回転数検出手段を備え、機関低温時のバルブオーバラップ量を、機関回転数が高いときに機関回転数が低いときより大きくなるように補正する回転数補正手段を備えた請求項1に記載のバルブタイミング制御装置が提供される。
【0016】
請求項3に記載の発明によれば、更に、機関の使用燃料の性状を判定する燃料判定手段と、該燃料判定手段により、機関使用燃料が軽質燃料であると判断されたときに、機関のバルブオーバラップ量を機関使用燃料が重質燃料であると判定された場合に較べて大きくなるように補正する燃料補正手段と、を備えた請求項1に記載のバルブタイミング制御装置が提供される。
請求項4に記載の発明によれば、前記燃料判定手段は、機関始動後の燃料タンク内の燃料温度の変化と燃料タンク内圧力の変化とに基づいて機関の使用燃料の性状を判定する、請求項3に記載のバルブタイミング制御装置が提供される。
【0017】
請求項1の発明では、機関低温時にはバルブオーバラップ量は機関高温時に較べて小さな値に設定されるが、バルブタイミングの変化速度(可変バルブタイミング機構の作動速度)が速い場合には、低温時であってもバルブタイミング変化速度が低い場合に較べてバルブオーバラップ量が大きな値に補正される。このため、機関低温時であっても可変バルブタイミング機構の応答速度が早く、最適バルブオーバラップ量と実際のバルブオーバラップ量との差が大きくならないような場合にはバルブオーバラップ量が大きな値に設定される。
【0018】
更に、請求項2の発明では、請求項1において、機関回転数に応じたバルブオーバラップ量の補正が行われる。すなわち、機関高回転時には可変バルブタイミング機構作動油ポンプの吐出圧や吐出流量が増大するため、可変バルブタイミング機構の作動速度は機関低回転時より速くなる。従って、機関低回転時に作動速度検出手段が検出した可変バルブタイミング機構作動速度に基づいてバルブオーバラップを制御すると、機関高回転時のバルブオーバラップ量が必ずしも適切にならないおそれがある。請求項2の発明では、回転数補正手段は作動速度補正手段により補正されたバルブオーバラップ量を機関回転数に応じて補正する。これにより、可変バルブタイミング機構作動速度の機関回転数による変化が補正される。
【0019】
請求項3の発明では、請求項1において、機関使用燃料が軽質燃料である場合には、バルブオーバラップ量は機関使用燃料が重質燃料である場合に較べて大きくなるように補正される。このため、機関低温時であっても使用燃料の気化のしやすさに応じてバルブオーバラップ量が補正され、燃料の気化が良好で壁面付着が生じにくいような場合にはバルブオーバラップ量が大きな値に設定される。
また、請求項4の発明では機関始動後の燃料タンク内の燃料温度の変化と燃料タンク内圧力の変化とに基づいて機関使用燃料が判定することにより、燃料の気化傾向が正確に判定される。
【0020】
【発明の実施の形態】
以下添付図面を用いて本発明の実施形態について説明する。
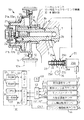
図1は本発明のバルブタイミング制御装置を4サイクル機関の吸気弁に適用した場合の概略構成を示す図である。
本実施形態においては、吸気弁と排気弁との駆動用ににそれぞれ別のカムシャフトを有するダブルオーバヘッドカムシャフト(DOHC)型機関が使用され、可変バルブタイミング機構は吸気カムシャフトのみに設けられている。すなわち、本実施形態では排気弁のバルブタイミング変更は行わず、吸気弁のバルブタイミングのみを運転条件に応じて変更することにより吸気弁と排気弁とのバルブオーバラップを変更するようにしている。なお、本発明はこの実施形態に限定されるものではなく、排気弁のみのバルブタイミング変更を行うもの、或いは吸気弁と排気弁との両方のバルブタイミング変更を行うものについても適用可能である。
【0021】
図1において、1はDOHC型機関の吸気弁(図示せず)を開閉駆動する吸気カムシャフト、その全体を10で示すのは吸気カムシャフト端部に設けられた可変バルブタイミング機構である。
可変バルブタイミング機構10は、円筒状スリーブ13を有するタイミングプーリ12と、カムシャフト1の端部を覆うカバー14とを備えており、タイミングプーリ12は円筒状スリーブ13を介して吸気カムシャフト1の周囲にカムシャフト1に対して回転可能に装着されている。また、カバー14はタイミングプーリ12にボルト15により固定され、プーリ12と一体に回転するようになっている。
【0022】
カバー14内部にはピストン部材17が設けられている。ピストン部材17は、円環状のピストン部19と、ピストン部19から延びる円筒部21とを備えており、ピストン部19の外周面と内周面とは、カバー14の内周面とプーリ12のスリーブ13の外周面とにそれぞれ摺接している。また、ピストン部材17の円筒部21の外周面と内周面とには、それぞれ所定の捩じれ角を有するアウターヘリカルギヤ21aとインナーヘリカルギヤ21bとが刻設されており、アウターヘリカルギヤ21aはカバー14内周面に形成された内歯ヘリカルギヤ22aと、またインナーヘリカルギヤ21bはカムシャフト1の端面にボルト1a、ピン1bにより一体に装着されたリング状の外歯ヘリカルギヤ22bとそれぞれ噛合している。
【0023】
本実施形態の可変バルブタイミング機構10では、機関のクランク軸(図示せず)の回転は、タイミングベルト12aを介してタイミングプーリ12に伝えられる。プーリ12が回転すると、カバー14がプーリ12と一体に回転し、ヘリカルギヤ22a、21aを介してカバー14に連結されたピストン部材17がカバー14と一体に回転する。ピストン部材17は、ヘリカルギヤ21b、22bを介して同時にカムシャフト1にも連結されているため、これによりカムシャフト1がプーリ12と一体に回転する。
【0024】
すなわち、本実施形態の可変バルブタイミング機構10では、カムシャフト1の回転駆動力は、クランク軸からタイミングベルト12aを介してタイミングプーリ12に伝達され、プーリ12からカバー14、ヘリカルギヤ22a、21a、ピストン部材17及びヘリカルギヤ21b、22bを経てカムシャフト1に伝達される。
【0025】
本実施形態の可変バルブタイミング機構10は、ピストン部材17をカムシャフト1軸線方向に移動させることにより吸気弁のバルブタイミングの変更を行う。
すなわち、ピストン部材17は、互いに噛合するそれぞれ所定の捩じれ角のヘリカルギヤ22a、21aと21b、22bとによってカバー14およびカムシャフト1に連結されている。このため、ピストン部材17がカムシャフト軸線方向に移動するとヘリカルギヤ22aと21a及び21b、22bの噛合位置はそれぞれの歯筋に沿って軸線方向に移動する。ところが、それぞれのギヤの歯面は、カムシャフト軸線方向に対して捩じれ角を有するため、噛合位置が軸線方向に移動すると、カバー14とピストン部材17、及びピストン部材17とカムシャフト1とはそれぞれヘリカルギヤの歯筋に沿って円周方向に相対移動する。このため、ピストン部材17の軸線方向移動にともなってカバー14とピストン部材17、及びピストン部材17とカムシャフト1とは相対的に回転することになる。従って、機関の運転中にピストン部材17をカムシャフト1軸線方向に移動させることにより、タイミングプーリ12の回転位相、すなわちクランク軸の回転位相に対するカムシャフト1の回転位相を進める(或いは遅らせる)ことが可能となり、カムシャフト1に駆動される吸気弁の開閉タイミングを進角(或いは遅角)させることができる。
【0026】
上述のように、本実施形態の可変バルブタイミング機構10は吸気カムシャフト1の回転位相のみを変化させるものであるため、バルブタイミング変更の際には吸気弁の開弁時期と閉弁時期とは常に同じ量だけ変化し、吸気弁の開弁期間自体は一定に維持される。
本実施形態では、機関運転中に、油圧を用いてピストン部材17を移動させることによって吸気弁のバルブタイミング変更操作を行う。図1に示すように、カムシャフト1内には2つの油通路2及び3が軸線方向に沿って穿設されている。油通路2はカムシャフト1の中心に設けられ、油通路2の軸端側はボルト1aに穿設されたポート2aを介してカバー14内面とピストン部材17の軸端側端面との間に形成される油圧室5に連通している。また、油通路2のもう一方の端部はカムシャフト1に半径方向に穿設されたポート2bを介して後述するリニアソレノイドバルブ25に接続されている。一方、油通路3の軸端側端部は前述のリング状外歯ヘリカルギヤ22bにより閉塞されている。また、油通路3は半径方向に穿設されたポート3aを介して、ピストン部材17端面とタイミングプーリ12及びカバー14とで形成される油圧室8に連通するとともに、別のポート3bを介してリニアソレノイドバルブ25に連通している。
【0027】
リニアソレノイドバルブ25は、スプール26を有するスプール弁であり、前述の油通路2のポート2bに配管を介して接続された油圧ポート26aと、油通路3のポート3bに配管を介して接続された油圧ポート26b、機関潤滑油ポンプ等の油圧供給源28に接続されたポート26c及び2つのドレーンポート26d、26eを備えている。バルブ25のスプール26はポート26aと26bのうちのいずれか一方を選択的にポート26cに連通し、他方をドレーンポートに接続するように動作する。
【0028】
すなわち、図1においてスプール26が左方向に移動すると、油通路2のポート2bに連通するポート26aはポート26cを介して油圧供給源28に接続され、ドレーンポート26dは閉鎖される。また、この時同時に油通路3のポート3bに接続されたポート26bはドレーンポート26eに連通する。このため、可変バルブタイミング機構10の油圧室5には、機関の潤滑油ポンプ等の油圧供給源28から油通路2、ポート2aを介して潤滑油が流入し、ピストン部材17を図1右方向に押動する。また、この時油圧室8内の潤滑油はポート3aから油通路3、ポート3b、リニアソレノイドバルブ25のポート26b等を通ってドレーンポート26eから排出される。このため、ピストン部材17は図1右方向に移動する。
【0029】
また、図1において逆にスプール26が右方向に移動すると、ポート26bはポート26cに接続され、ポート26aはドレーンポート26dに接続される。これにより、油圧室8には油通路3を通って潤滑油が流入し、油圧室5からは油通路2を通ってドレーンポート26dに潤滑油が排出されるため、ピストン部材17は図1左方向に移動する。
【0030】
なお、本実施形態では、油圧室5に潤滑油が供給されてピストン部材17が図1右方向に移動すると吸気弁バルブタイミングは進角側に変更され、油圧室8に潤滑油が供給されてピストン部材17が図1左方向に移動すると吸気弁バルブタイミングは遅角側に変更されるようにヘリカルギヤ21a、21b及び22a、22bの捩じり角が設定されている。
【0031】
また、図1に25bで示すのは、スプール26を駆動するリニアソレノイドアクチュエータである。リニアソレノイドアクチュエータ25bは後述する制御回路30からの制御信号を入力し、この制御信号の大きさに比例する量だけスプール26を移動させることにより、ピストン部材17の位置、すなわち吸気弁のバルブタイミングを変更する。
【0032】
図1に30で示すのは、リニアソレノイドバルブ25の作動を制御する制御回路である。本実施形態では、制御回路30はリードオンリメモリ(ROM)32、ランダムアクセスメモリ(RAM)33、マイクロプロセッサ(CPU)34、入力ポート35、出力ポート36を相互に双方向性バス31で接続した公知の構成のディジタルコンピュータとして構成される。また、制御回路30はバッテリ等の電源に直結され、機関が停止されても記憶保持が可能なバックアップRAM37を備えている。本実施形態の制御回路30は、機関運転条件に応じてリニアソレノイドバルブ25の作動を制御して吸気弁のバルブタイミングを調節し、吸排気弁のバルブオーバラップ量を制御する。この制御のため、制御回路30の入力ポート35には、機関の吸気通路に設けられたエアフローメータ41から機関吸入空気量(体積流量)に比例する電圧信号と、機関冷却水通路に設けられた水温センサ42から機関冷却水温度THWに比例する電圧信号とが、それぞれAD変換器43を介して入力されているほか、機関クランク軸に設けられたクランク軸回転角センサ44からクランク軸回転角CAを表すパルス信号と、カムシャフトに設けられたカム回転角センサ45からカムシャフト1の回転角CMAを表すパルス信号とが入力されている。
【0033】
また、本実施形態では機関の燃料タンク(図示せず)には、タンク内の燃料温度を検出する燃料温度センサ47と燃料タンク内圧を検出する燃料タンク圧力センサ49とが設けられており、センサ47からの燃料温度FTに比例する電圧信号とセンサ49からのタンク内圧FPに比例する電圧信号とが、それぞれAD変換器43を介して制御回路30の入力ポート35に入力されている。
【0034】
エアフローメータ41で検出した機関吸入空気量は、公知の方法で重量流量Gに換算され、更に機関回転数NEを用いて機関1回転当たりの吸気重量流量GN(=G/NE)が一定時間毎に算出され、制御回路30のRAM33に格納される。
クランク軸回転角センサ44からのパルス信号は、クランク軸回転720度毎に発生するクランク軸の基準位置を示すN1信号と、クランク軸回転30度毎に発生するNE信号とからなり、カム回転角センサ45からはカムシャフト回転360度毎にカムシャフトが基準位置に到達したことを示すCN1パルス信号が発生する。制御回路30は一定時間毎にNE信号のパルス間隔から機関回転数NEを計算するとともに、この機関回転数NEを用いてN1信号とCN1信号との時間間隔からカムシャフト1の回転位相(吸気弁の実際のバルブタイミング)VTを演算する。この演算結果はRAM33に格納される。また、冷却水温度THWは一定時間毎にAD変換され同様にRAM33に格納される。つまり、RAM33に格納されるGN、NE、VT、THW及びFT、FP等の各検出値は一定時間毎に更新され、常時最新の値がRAM33に格納されている。
【0035】
後述するように、機関回転数NEと機関吸入空気量GNとは機関の負荷条件を表すパラメータとして使用される。また、冷却水温度THWは後述するバルブタイミングの機関温度に基づく補正のために使用される。また、タンク内燃料温度FTとタンク内圧力FPとは、機関燃料の性状の判定に使用される。
一方制御回路30の出力ポート36は、駆動回路48を介してリニアソレノイドバルブ25のアクチュエータ25bに接続され、制御信号をアクチュエータ25bに供給している。
【0036】
本実施形態では、制御回路30は、燃料温度センサ47、燃料タンク圧力センサ49とともに、燃料性状を判定する燃料性状判定手段、及び機関低温時にバルブオーバラップ量を燃料性状に応じて補正する燃料補正手段として機能する。
次に、本実施形態の吸気弁のバルブタイミング設定について図2を用いて説明する。
【0037】
図2は吸気弁と排気弁との一般的な開閉時期を模式的に示す図である。図2において、TDCはピストン行程上死点、BDCは下死点を示し、IO、ICはそれぞれ吸気弁の開弁時期と閉弁時期、EO、ECはそれぞれ排気弁の開弁時期と閉弁時期とを表している。図2に示すように、吸気弁は排気行程上死点(TDC)前から開弁し、吸気行程下死点(BDC)後に閉弁する。また、排気弁は爆発行程下死点(BDC)前から開弁し、排気行程上死点(TDC)後に閉弁する。図2に示すように、排気行程では排気弁が閉じる(EC)前に吸気弁が開く(IO)ようにバルブタイミングが設定されるため、吸気弁と排気弁との両方が開弁している期間(図2にOLで示す期間)が存在する。本実施形態では期間OLの長さ(角度)をバルブオーバラップ量と称する。また、本実施形態では吸気弁開弁時期から上死点までの角度をバルブタイミング値VTと定義している。図2から判るように、本実施形態では排気弁の閉弁時期は固定されているため、バルブタイミング値VTとバルブオーバラップ量OLとは一対一に対応する。すなわち、VTが大きい(吸気弁の開弁時期IOが早い)ことはバルブオーバラップ量OLもそれに応じて大きくなっていることを意味し、VTが小さい(吸気弁の開弁時期IOが遅い)ことは、バルブオーバラップ量OLもそれに応じて小さくなっていることを意味している。
【0038】
一般に、吸気弁のバルブタイミングVT(バルブオーバラップOL)の設定が機関性能に及ぼす影響は以下の通りである。
(1)VTを増大させてバルブオーバラップ量OLを大きく設定すると、吸気管負圧が増大(吸気ポート絶対圧力が低下)する低負荷時には、既燃ガスの吸気ポートへの吹き返しが大きくなる。また、吸気ポートに吹き返した既燃ガスが燃焼室内に再吸入されるため燃焼室内の残留既燃ガス量が大きくなる、いわゆる内部EGR効果が増大する。一方、負荷が増大するにつれてスロットル弁開度が増大し吸気負圧は減少するため、高負荷時にはバルブオーバラップ量OLを大きく設定しても既燃ガスの吹き返しは小さくなる。
【0039】
(2)VTを減少させてバルブオーバラップ量OLを小さく設定すると、吸気弁の開弁時期と閉弁時期とはバルブオーバラップ量OLが大きい場合に較べて遅くなる(図2、IO′、IC′はバルブオーバラップ量を小さく設定したときの吸気弁の開弁時期と閉弁時期とを示す)。この場合、圧縮行程時に吸気弁が開弁している期間(図2にIBで示す期間)が長くなるため、低中速回転領域では気筒内に吸入された新気が圧縮行程初期に気筒から吸気ポートに押し戻されるようになり、気筒の充填効率が低下する。従って、バルブオーバラップ量OLを小さく設定すると、気筒の実圧縮比が低下する。
【0040】
一方、高回転領域では吸気の流速が早くなるため吸気慣性効果が生じ、閉弁時期を遅くするほど充填効率が向上して実圧縮比が増大する。このため、機関高回転領域では、バルブオーバラップ量OLを小さく設定すると、気筒の実圧縮比は増大する。
本実施形態では、上記の機関性能に対するバルブタイミング値の影響を考慮して、以下に説明するように機関の各運転領域における吸気弁バルブタイミングを設定している。
【0041】
図3は、本実施形態における標準状態における運転時、すなわち機関の暖機完了後の運転時のバルブタイミング値VTの設定値の一例を示している。以下、この標準状態における、バルブタイミング設定値を基本バルブタイミング値(tVVT)と称する。
図3の表中、縦軸は機関負荷を表すパラメータとして使用する機関1回転当たりの吸入空気重量GN(グラム/回転)、横軸は機関回転数NE(RPM)を表しており、基本バルブタイミング値tVVTはクランク軸の回転角度(°CA)で表してある。
【0042】
図3に示すように、基本バルブタイミング値tVVTは、機関の中回転中負荷運転領域(図3においてNE≒2400〜3200RPM、GN≒1.0〜1.25グラム/回転付近の領域)で最大値をとり(すなわち、バルブオーバラップ量OLも最大となり)、この中回転中負荷領域から回転数または負荷が離れるほど小さな値になり、バルブオーバラップ量OLも小さくなる。
【0043】
すなわち、本実施形態では低負荷領域(例えば、GN<1.00)では、負荷が低いほど基本バルブタイミング値tVVT(すなわち、バルブオーバラップ量OL)を小さく設定して、既燃ガスの吹き返しによる内部EGRの低減による燃焼の安定を図っている。また、中負荷領域では、内部EGR量を大幅に増大することによりエミッションの改善とポンピングロスの低減を図ることができるためバルブオーバラップ量OL(基本バルブタイミング値tVVT)は低負荷または高負荷時より全般的に大きく設定される。しかし、中負荷領域においても、低速領域でバルブオーバラップ量OLをあまり大きく設定すると燃焼不安定が生じやすくなるため、また高速中負荷領域ではバルブオーバラップ量OLを大きく設定すると吸気慣性を利用できなくなり逆に充填効率が低下するため、低速領域と高速領域ではバルブオーバラップ量OLは比較的小さい値に設定される。このため本実施形態では、中速中負荷領域でバルブオーバラップ量OLが最大となるように基本バルブタイミング値tVVTの値が設定されている。
【0044】
また、高負荷領域では、内部EGRを低減して出力を増大する必要があるためVTは全般的に小さく設定される。特に高速領域ではVTを小さくするほど吸気慣性による新気充填効率の向上効果が大きいため、低、中速領域よりもVTが小さく設定されている。このため、本実施形態では、高負荷領域(GN>1.25の領域)では、負荷が大きくなるほどバルブオーバラップ量OLは小さくなり、更に同一負荷では低速領域(NE<1600RPM)より高速領域(NE>3200RPM)でバルブオーバラップ量OLが小さくなるように基本バルブタイミング値tVVTが設定されている。
【0045】
次に、本実施形態の機関低温時における基本バルブタイミング値tVVTの補正について説明する。
上述したように、図3に示したバルブタイミングtVVT(バルブオーバラップ量)は、機関が十分に暖機された後の標準状態におけるものである。ところが、機関温度が低い状態では燃料の気化状態が悪いため、吸気ポートへの既燃ガスの吹き返しが大きいと、吸気ポートに供給された液状のままの燃料粒子が既燃ガスの吹き返しにより吸気ポート壁面に付着してしまう問題がある。機関低温時には吸気ポート壁面温度も低く、吸気ポート壁面に付着した燃料は気化しにくいため、機関低温時に燃料の壁面付着が生じると気筒内に実際に供給される燃料の量が減少してしまい、低温運転時の機関回転数上昇のもたつき(いわゆる冷間ヘジテーション)などの問題が生じる。そこで、本実施形態では、機関冷却水温度THWに基づいて図3の基本バルブタイミング値tVVTを補正し、機関温度(機関冷却水温度THW)が低いほど実際のバルブオーバラップ量が小さくなるようにして、冷間ヘジテーションの発生を防止している。
【0046】
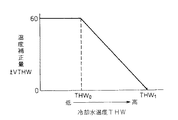
図4は、冷却水温度THWと、THWに基づくバルブタイミング温度補正量tVTHWとの関係を示すグラフである。図4に示すように、温度補正量tVTHWの値は、暖機完了後(冷却水温度THWが所定値THW1 以上)では0に設定され、THW<THW1 の温度範囲では冷却水温度THWが低いほど大きな値に設定され、さらに冷却水温度THWが所定値THW0 以下の領域では一定の大きな値に設定される。後述するように、制御回路30は冷却水温度TWHに基づいて、温度補正量tVTHWの値を図4から決定し、機関回転数と負荷とから決定される基本バルブタイミング値tVVTを温度補正量tVTHWを用いて補正し、実際の可変バルブタイミング機構10のバルブタイミング制御目標値VVTを、VVT=tVVT−tVTHW(但しVVT≧0)として算出する。
【0047】
この結果、温度補正後のバルブタイミング制御目標値VVTは、図3の基本バルブタイミング値tVVTから全運転領域にわたって一律に冷却水温度THWに応じた補正量tVTHWだけ小さく設定されることになる。
ところが、このように機関低温時に全部の負荷領域においてバルブオーバラップ量が小さくなるような温度補正をすると、前述したように吸気弁の閉弁時期の遅延により、特に吸気慣性による過給効果が得られない低中速運転領域では機関実圧縮比の低下による機関の出力低下が大きくなる問題がある。
【0048】
ところで、上記バルブオーバラップ量の機関温度による補正は、機関低温時に既燃ガスの吸気ポートへの吹き返しにより燃料がポート壁面に付着することを防止することを主たる目的としている。しかし、機関低温時でも吸気ポートに供給された燃料粒子が気化または十分に微粒化していれば、既燃ガスの吸気ポートへの吹き返しがあっても燃料の壁面付着は少なくなる。一方、燃料の気化傾向は燃料の組成により大きく異なっており、軽質成分を多く含む燃料(軽質燃料)では、機関低温時でも気化状態は良好である。このため、機関低温時であっても気化状態が良好な軽質燃料を使用している場合には燃料の壁面付着は生じにくくなっており、バルブオーバラップ量を多少大きく設定しても冷間ヘジテーション等の問題は生じない。
【0049】
すなわち、機関低温時には一律にバルブオーバラップ量を小さく設定していたのでは、本来もっとバルブオーバラップ量を大きく設定して機関出力を増大可能な軽質燃料使用時にも、バルブオーバラップ量が小さく設定されてしまい、不必要に機関出力の低下を生じさせることになる。そこで、本実施形態では、前述の温度補正を行った後のバルブタイミング設定値を更に機関の使用燃料の性状に応じて補正し、使用燃料が軽質であるほどバルブオーバラップ量を増大するようにしている。これにより、機関低温時には真に必要な場合にのみバルブオーバラップ量が低減され、不必要な機関出力の低下が防止される。
【0050】
上記のように、使用燃料の性状に応じて機関低温時のバルブオーバラップ量を補正するためには、現在機関で使用している燃料の気化傾向を正確に判定する必要がある。本実施形態では、機関始動後の燃料タンク内の燃料温度の変化と燃料タンク内圧力の変化とを計測することにより、以下の方法で燃料性状を判定するようにしている。
【0051】
図5は燃料タンク内の圧力(燃料蒸気圧力)とタンク内の燃料温度との関係を説明する図である。図5の横軸は燃料温度を、縦軸はタンク内圧力をそれぞれ示しており、図中のカーブAは軽質成分を多く含む燃料(軽質燃料)の場合を、カーブBは重質成分を多く含む燃料(重質燃料)の場合をそれぞれ示している。燃料タンク内の圧力は燃料温度が上昇すると燃料蒸気圧の上昇とともに増大する。このとき、図5に示すように気化しやすい軽質燃料(カーブA)では、温度が同一であっても気化しにくい重質燃料(カーブB)より蒸気圧が高くなるため、燃料タンク内の圧力は大きくなる。また、図5に示すように軽質燃料の場合のタンク内圧と重質燃料の場合のタンク内圧との差は燃料温度が高くなるほど大きくなる。すなわち、燃料温度が一定量上昇する間のタンク内圧増加は、燃料が軽質であるほど(気化しやすいほど)大きくなっている。そこで、本実施形態では、燃料温度が所定の温度幅(図5、ΔF)だけ上昇する間のタンク内圧力上昇(図5、ΔFP)を計測することにより、燃料の気化傾向を判定している。
【0052】
図6、図7は、上記燃料性状を判定するための判定ルーチンを説明するフローチャートである。本ルーチンは制御回路30により一定時間毎に実行される。
本ルーチンでは、機関始動毎に燃料性状の判定を行うようにしている。
図6においてルーチンがスタートすると、ステップ601では機関始動が完了したか否かが判定され、機関始動が完了していない場合(始動操作中の場合)には、ステップ603とステップ605でフラグXFUEL、XDTの値がそれぞれ初期値1に設定される。機関始動完了の有無は、例えば機関回転数が所定値以上(例えば400RPM以上)に上昇したか否かに基づいて判定される。また、XFUELは、機関燃料性状の判定を機関始動毎に1回のみ実行するためのフラグであり、フラグXFUELの値は燃料性状の判定が完了した後ステップ633(図7)で0にセットされる。更に、フラグXDTは計測開始時の燃料温度FT0とタンク内圧FP0とを記憶するためのフラグであり、XDTの値はFT0とFP0とを記憶後にステップ621で0にセットされる。
【0053】
ステップ601で機関始動が完了していた場合には、ステップ607に進み、フラグXFUELの値が1にセットされているか否かを判定する。XFUEL≠1の場合(すなわち、燃料性状判定が既に終了している場合)には、ステップ609以下は実行せずに直ちにルーチンを終了する。
ステップ607で、XFUEL=1であった場合には、ステップ609に進み、燃料タンク内の燃料残量FL、燃料タンク内圧FP及び燃料温度FTを読み込み、ステップ611からステップ615でこれらの値に基づいて、燃料性状判定のための前提条件が成立しているか否かを判定する。
【0054】
ステップ611からステップ615で判定される前提条件は、▲1▼タンク内燃料残量FLが最小値(AL)より大きいこと、▲2▼タンク内燃料温度FTが所定の温度範囲内(B<FT<C)にあること、▲3▼タンク内圧FPが所定の圧力範囲内(D<FP<E)にあること、であり上記▲1▼から▲3▼の前提条件のいずれか一つでも成立しない場合には、本ルーチンは燃料性状の判定を行うことなく直ちに終了する。
【0055】
ここで、燃料性状判定の際に条件▲1▼から▲3▼を要求するのは、後述するように本実施形態では、燃料タンク内の温度、圧力の上昇により燃料性状を判定するため、温度と圧力の上昇が安定した範囲で計測を行う必要があるためである。すなわち、条件▲1▼を要求するのは、タンク内の燃料残量が所定の最小値以上でない場合にはタンク内圧力上昇が小さくなり、計測誤差が生じやすいためであり、条件▲2▼を要求するのは、温度上昇に対するタンク内圧力の上昇がある程度大きい範囲(図5参照)で計測を行うためである。また、条件▲3▼を要求するのは、燃料タンクには通常、タンク内圧が一定の範囲内になるように制御する圧力制御弁が設けられているため、この圧力制御弁が作動しない圧力範囲で計測を行う必要があるからである。
【0056】
ステップ611からステップ615の条件が全て成立すると、ステップ617から621では、条件が成立した時点のタンク内圧FPと燃料温度FTとを、それぞれ計測開始時の圧力FP0、温度FT0として記憶する。ステップ617及びステップ621は、ステップ619を1回だけ実行するために設けられている。
【0057】
次いで、ルーチンは図7ステップ623に進む。
図7、ステップ623では、現在の燃料温度FTが計測開始時の温度FT0(ステップ619)から所定の温度幅ΔFだけ上昇したか否かが判定され、上昇幅がΔFより小さい場合にはステップ625以下を実行せずにルーチンを終了する。また、計測開始時からΔFだけ燃料温度が上昇していた場合には、ステップ625で計測開始時からの燃料タンク内圧力上昇幅ΔFP(=FP−FP0)が算出される。そして、ステップ627では燃料性状基本学習値tKFUELの値がステップ625で算出したΔFPに基づいて決定される。
【0058】
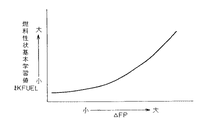
図8は、ΔFPとtKFUELとの関係を示す図である。図8に示すように本実施形態では、tKFUELの値はΔFPの値が大きいほど大きな値に設定される。図5で説明したように、所定の温度上昇幅(ΔF)に対するタンク内圧力の上昇幅(ΔFP)は、燃料の揮発性(気化傾向)が大きいほど、すなわち燃料が軽質であるほど大きくなる。従って、本実施形態では燃料性状基本学習値tKFUELの値は、燃料が軽質であるほど大きな値に設定されるようになる。
【0059】
ステップ629、ステップ631はステップ627で求めた燃料性状基本学習値tKFUELの値のタンク内燃料残量に応じた補正を行うステップである。
タンク内の燃料残量が少ない(すなわち、タンク内燃料油面上部空間の容積が大きい)と、燃料温度上昇に対するタンク内圧力の上昇が小さくなる。従って、現在のタンク内燃料残量が少ないほどステップ627で求めたtKFUELの値は真の値より小さくなっていると考えられる。そこで、本実施形態では、ステップ609で読み込んだ燃料残量FLの値に応じて、燃料残量補正係数tKFLを決定し(ステップ629)、真の燃料性状学習値KFUELを、KFUEL=tKFUEL×tKFLとして算出している。
【0060】
図9は、燃料残量補正係数tKFLと燃料残量FLとの関係を示す図である。図9に示すように、tKFLの値は燃料残量FLの値が小さいほど大きな値に設定される。
以上により、燃料性状学習値KFUELを算出後、ステップ633では算出したKFUELの値を制御回路30のバックアップRAM37に格納し、ステップ635でフラグXFUELの値を0にセットした後ルーチンを終了する。前述のように、フラグXFUELの値が0にセットされると、その後は燃料性状の判定(ステップ609からステップ633)は実行されなくなる。
【0061】
なお、燃料性状学習値KFUELの算出に用いた図8、図9の関係は予め実際の燃料タンクと燃料性状とに基づいて実験等により決定し、制御回路30のROM32に格納してある。
次に、上記燃料性状学習値KFUELを用いた本実施形態のバルブタイミング制御について説明する。図10は、本実施形態のバルブタイミング制御ルーチンを示すフローチャートである。本ルーチンでは、機関運転条件に応じてバルブタイミングを設定するとともに、上記に説明したように機関冷却水温度と燃料性状とに基づいてバルブタイミング設定値を補正する。このルーチンは、制御回路30により一定時間毎に実行される。
【0062】
図10においてルーチンがスタートすると、ステップ1001では、機関1回転当たりの吸気重量流量GNと機関回転数NEが読み込まれる。次いでステップ1003では、このGNとNEとの値を用いて前述の図3の関係から基本バルブタイミングtVVTが読みだされる。図3の関係は、予めGNとNEとを用いた数値マップとして制御回路30のROM32に格納されている。
【0063】
基本バルブタイミングtVVT算出後、ステップ1005では、現在の冷却水温度THWが読み込まれ、ステップ1007では、この冷却水温度THWから図4の関係を用いて温度補正量tVTHWが決定される。ここで、図4の関係も予めTHWの値を用いた数値マップの形で制御回路30のROM32に格納されている。
【0064】
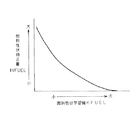
次いで、ステップ1009では、図6のルーチンで算出した燃料性状学習値KFUELの値がバックアップRAM37から読みだされる。そして、ステップ1011では、KFUELの値に基づいて燃料性状補正量tVFUELが決定される。図11は、燃料性状学習値KFUELと燃料性状補正量tVFUELとの関係を示すグラフである。図11に示すように、本実施形態では、燃料性状補正量tVFUELの値は、学習値KFUELが大きな値であるほど、すなわち燃料が軽質であるほど小さな値に設定される。
【0065】
ステップ1013では、上記により求めた温度補正量tVTHWと燃料性状補正量tVFUELとを用いて、基本バルブタイミングtVVTが補正され、バルブタイミングの設定値VVTが、VVT=tVVT−tVTHW−tVFUELとして算出される。
次いで、ステップ1015、1017では、ステップ1011で補正したバルブタイミング設定値VVTが負の値になっている場合にはVVT=0に再設定され、バルブタイミング設定値VVTが常にVVT≧0になるように制限する。
【0066】
そして、ステップ1019では、カム軸回転角センサ45で検出した実際のバルブタイミングVTが設定値VVTに一致するようにリニアソレノイドバルブ25を制御してルーチンを終了する。この制御は、例えばVVTとVTとの偏差に基づくPDI(比例微分積分)制御とされる。
上記補正を行うことにより、バルブタイミングは他の条件が同じであれば、機関温度が低いほど小さな値に設定され、機関温度が低いほどバルブオーバラップ量が小さくなる。また、バルブタイミングVTは使用燃料の性状によっても補正され、他の条件が同一であれば使用燃料が軽質であるほどバルブタイミングVTは大きな値になるように補正され、バルブオーバラップ量は大きな値になる。このため、機関温度が低い場合でも使用燃料が軽質である場合には重質燃料使用時に較べてバルブオーバラップは大きな値に設定されるようになり、機関低温時に本来必要のない機関出力低下が生じることが防止される。
【0067】
次に、本発明バルブタイミング制御の別の実施形態について説明する。
前述の実施形態では、燃料性状に応じてバルブタイミングを補正することにより、機関低温時であってもバルブオーバラップを小さく設定する必要のない軽質燃料使用時には、バルブオーバラップ量を増大して機関出力の低下を防止していた。これに対して、本実施形態では燃料性状の代わりに可変バルブタイミング機構10の作動速度に応じてバルブオーバラップ量を補正する。
【0068】
前述したように、一般に機関低温時には可変バルブタイミング機構作動油の粘性増大や各作動部のフリクション増大等により可変バルブタイミング機構作動速度は低下する。このため、機関負荷状態が変化してバルブタイミング制御目標値(最適バルブタイミング値)が減少した場合には、実際のバルブタイミングが制御目標値に到達するまでに比較的長い時間を要するようになり、一時的に実際のバルブタイミングが最適バルブタイミング値より大きい状態が続くことになる。
【0069】
この場合、バルブオーバラップ量も最適値より大きい状態となるため、実際のバルブオーバラップ量が最適値に較べて非常に大きい場合には機関の失火を生じることになる。そこで、一般的には機関低温時で可変バルブタイミング機構の作動速度が低下した場合でも、実際のバルブオーバラップ量が最適値に較べて過度に大きくなることがないように、機関低温時にはバルブオーバラップ量を極めて小さく設定することが行われている。すなわち、通常の低温時のバルブオーバラップ量の設定値は、可変バルブタイミング機構の作動速度が大幅に低下した場合を考慮して設定されている。
【0070】
ところが、実際には機関低温時であっても一律に可変バルブタイミング機構の作動速度が低下するわけではない。例えば、作動油として低温時の粘性が低いものを使用した場合などは機関低温時であっても可変バルブタイミング機構の作動速度はそれほど低下しない。また、機構各部のクリアランスには公差の範囲内でばらつきがあるため、製品によっては各部のクリアランスが大きく、低温時のフリクションが小さいために作動速度が低温時でもそれほど低下しないものも存在する。このような場合には、低温時のバルブオーバラップ量を比較的大きな値に設定しても失火が生じるおそれはない。このため、低温時のバルブオーバラップ量を一律に小さな値に設定したのでは、低温時の作動速度がそれほど低下しない場合には不必要に機関出力を低下させる結果になる。
【0071】
そこで、本実施形態では機関運転中に可変バルブタイミング機構10の作動速度を実際に検出し、検出した作動速度に応じてバルブタイミングの設定値を補正するようにしている。
図12は、可変バルブタイミング機構の作動速度を検出し、作動速度に応じてバルブタイミングの作動速度補正量tVVTRを算出する補正量算出ルーチンを示すフローチャートである。本ルーチンは、制御回路30により一定時間毎(例えば100ミリ秒程度毎)に実行される。
【0072】
図12においてルーチンがスタートすると、ステップ1201では、現在の実際のバルブタイミングの値VTと、後述するバルブタイミング制御ルーチン(図14)で算出されるバルブタイミング設定値(制御目標値)VVTとが読み込まれ、ステップ1203では前回ルーチン実行時からのバルブタイミング値VTの変化量ΔVTが、ΔVT=|VT−VTi-1 |として算出される。VTi-1 は、前回ルーチン実行時のバルブタイミング値である。本ルーチンは一定時間間隔で実行されるため、この変化量ΔVTは現在の可変バルブタイミング機構の実際の作動速度を表すことになる。そして、ステップ1205では、次回のルーチン実行に備えてVTi-1 の値を更新する。
【0073】
次いで、ステップ1207では、バルブタイミング制御目標値VVTと現在のバルブタイミング値VTとの偏差|VVT−VT|が所定値Aより大きいか否かが判定され、|VVT−VT|>Aの場合にのみステップ1209から1215の作動速度補正量の算出ステップを実行する。偏差|VVT−VT|が所定値Aより大きい場合にのみ作動速度補正量を算出するようにしたのは、制御目標値VVTと実際のバルブタイミングVTとの偏差がある程度大きく、可変バルブタイミング機構10の作動速度が十分に大きくなっている状態で計測したバルブタイミング値変化量ΔVTを作動速度として採用するようにするためである。すなわち、制御目標値と実際のバルブタイミング値との偏差がある程度大きい状態では、可変バルブタイミング機構の作動速度も大きくなっており、作動速度のばらつきも少なくなっている。このため、この状態で計測した変化量ΔVTに基づいて作動速度補正量を算出することにより、信頼性の高い作動速度補正を行うことができるためである。
【0074】
ステップ1207で、偏差|VVT−VT|が所定値Aより大きい場合には、ついでステップ1209で、制御目標値VVTが実際のバルブタイミング値VTより大きいか否か、すなわち現在可変バルブタイミング機構がバルブタイミングの進角動作中(バルブタイミングを増大中)か遅角動作中(バルブタイミングを低減中)かを判定する。そして、進角中(VVT>VT)であった場合にはステップ1211に進み、ステップ1203で算出したバルブタイミング変化量(変化速度)ΔVTを用いて、図13にカーブAで示した関係から作動速度補正係数tVVTRを決定する。また、遅角中(VVT≦VT)であった場合には、ステップ1213に進み、ΔVTを用いて、同様に図13にカーブBで示した関係から作動速度補正係数tVVTRを決定する。そして、ステップ1215では、ステップ1211またはステップ1213で決定した作動速度補正係数tVVTRを、実際に使用する作動速度補正量VVTRとして記憶してルーチンを終了する。
【0075】
図13は、作動速度補正係数tVVTRと可変バルブタイミング機構作動速度ΔVTとの関係を示す図である。通常、可変バルブタイミング機構はカム軸から進角側または遅角側のいずれかの方向に反力を受けているため、他の条件が同一であっても進角動作中と遅角動作中とでは作動速度ΔVTが異なってくる。そこで、本実施形態では進角動作中か遅角動作中かにかかわらず同一の作動速度補正係数tVVTRが得られるように、進角動作中(カーブA)と遅角動作中(カーブB)との2つのカーブを準備し、計測したΔVTが進角中か遅角中かに応じて選択するようにしている。なお、図13は可変バルブタイミング機構がカム軸からバルブタイミング遅角方向に反力を受ける場合(遅角動作の作動速度が進角動作の作動速度より速い場合)を示している。
【0076】
図14は上記の作動速度補正量VVTRを用いた可変バルブタイミング機構の作動速度に応じた補正を行う、本実施形態のバルブタイミング制御ルーチンのフローチャートである。本ルーチンは制御回路30により一定時間毎に実行される。
図14において、ルーチンがスタートすると、ステップ1401からステップ1407ではGN、NEに基づく基本バルブタイミングtVVTの設定と、機関温度に基づく温度補正量tVTHWの決定とが行われる。ステップ1401からステップ1407の各ステップは、図10のステップ1001から1007と同一であるので、ここでは説明は省略する。
【0077】
ステップ1407を終了すると、本ルーチンではステップ1409以下の可変バルブタイミング機構作動速度に基づくバルブタイミングの補正が行われる。すなわち、ステップ1409では図12のルーチンで算出した作動速度補正量VVTRを読み込み、ステップ1411では、ステップ1407で算出した温度補正量tVTHWと作動速度補正量VVTRとを用いて、基本バルブタイミングtVVTを補正し、バルブタイミング設定値VVTを、VVT=tVVT−tVTHW+VVTRとして設定する。すなわち、バルブタイミングは作動速度補正量VVTRが大きい程進角され、バルブオーバラップが増大することになる。前述のように作動速度補正量VVTRは、可変バルブタイミング機構作動速度が大きいほど大きな値に設定される(図13)ため、本実施形態では機関低温時であってもバルブオーバラップ量は可変バルブタイミング機構作動速度が大きいほど大きな値に設定されることになる。
【0078】
上記によりバルブタイミングVVTを設定後、ステップ1413からステップ1419ではバルブタイミング設定値VVTが正の値であり、且つ基本バルブタイミングtVVTを越えないように制限し、ステップ1421では制限後のVVTに基づいて可変バルブタイミング機構10を制御する。
本実施形態では、上記ルーチン実行により機関低温時であっても可変バルブタイミング機構作動速度が大きく、バルブオーバラップ量を小さく設定する必要がない場合にはバルブオーバラップ量が可変バルブタイミング機構作動速度に応じて増大補正されるので、機関低温時であっても本来必要のない機関出力低下が生じることを防止できる。
【0079】
次に、可変バルブタイミング機構作動速度に基づく補正量VVTRの算出の、図12とは別の実施形態について説明する。図12の実施形態では、バルブタイミングの設定値VVTと実際のバルブタイミング値VTとの差が大きい場合のバルブタイミング値の変化速度ΔVTに基づいて補正量VVTRを算出している。しかし、実際には可変バルブタイミング機構の作動速度は機関回転数によって変化する。例えば、機関低回転時には機関駆動の油圧ポンプの回転数も低くなる。このため、可変バルブタイミング機構作動油の油圧が低下し、可変バルブタイミング機構の作動速度も低下する。また、逆に機関高回転時には油圧ポンプの回転数が上昇し、作動油油圧が上昇するため可変バルブタイミング機構作動速度は大きくなる。
【0080】
一方、前述のように図12のルーチンでは、設定値VVTと実際のバルブタイミング値VTとの偏差が大きい場合にのみ作動速度補正量VVTRを算出しているため、VVTRの算出頻度は比較的少なくなる。このため、VVTR算出時の機関回転数と、VVTRを用いてバルブタイミングを補正する時の機関回転数とが異なっていると、実際の可変バルブタイミング機構作動速度と補正量VVTRとが対応しなくなるおそれがある。すなわち、機関低回転時に算出したVVTRを用いて、機関高回転時にバルブタイミング補正を行うと実際には可変バルブタイミング機構作動速度は大きいにもかかわらずバルブオーバラップの増大量は小さく設定されてしまう(図14、ステップ1411)。また、逆に機関高回転時に算出したVVTRを用いて機関低回転時に図14ステップ1411の補正を行うと、実際には可変バルブタイミング機構の作動速度が低下しているにもかかわらず、バルブオーバラップが大きく設定されてしまうおそれがある。
【0081】
そこで、本実施形態では作動速度補正量VVTRの算出時とVVTRに基づくバルブタイミング補正時とにそれぞれ機関回転数に基づいて補正を行うことにより、回転数差により生じる作動速度の差を補正している。
図15は機関回転数による可変バルブタイミング機構作動速度変化の一例を示している。図15(A) は、機関駆動の油圧ポンプの吐出圧力の機関回転数による変化を示している。図15(A) に示すように、ポンプ吐出圧力は機関回転数が上昇するにつれて高くなる。また、図15(B) は図15(A) の油圧変化による可変バルブタイミング機構作動速度の変化を示す。図15(B) に示すように可変バルブタイミング機構作動速度は、油圧ポンプの吐出圧力と略同一の変化を示す。
【0082】
本実施形態では、図15の特性に基づいて回転数に応じて決定される回転数補正係数tVNEを導入し、作動速度補正量VVTRを補正する。図16は、回転数補正係数tVNEと機関回転数NEとの関係を示す図である。図16に示すように、回転数補正係数tVNEは、図15(B) と同一の特性になるように設定されている。
【0083】
図17は、上記補正係数tVNEを用いた作動速度補正量VVTR算出ルーチンを示すフローチャートである。図17、ステップ1701からステップ1713は、バルブタイミング値の変化量ΔVTから作動速度補正係数tVVTRを算出するステップであり、図12のステップ1201からステップ1213と同一であるので、ここでは説明を省略する。本実施形態では、上記により作動速度補正係数tVVTRを算出した後、ステップ1715で現在の機関回転数NEを読み込んで、ステップ1717でこの回転数NEを用いて図16の関係から回転数補正係数tVNEを算出する。そして、ステップ1719では、tVVTRをtVNEで除した値を基本作動速度補正量VVTR0 として記憶する。
【0084】
図18は、上記により記憶した補正量VVTR0 と回転数補正係数tVNEとを用いた本実施形態のバルブタイミング制御ルーチンを示すフローチャートである。図18のルーチンは、図14のルーチンのステップ1409と1411との間にステップ1810とステップ1810aとが追加されている点のみが相違し、ステップ1801からステップ1809は図14のステップ1401からステップ1409と、ステップ1811からステップ1821は図14のステップ1411からステップ1421と、それぞれ同一の操作となっている。
【0085】
図18では、ステップ1809で、図17で設定した基本作動速度補正量VVTR0 を読み込むとともに、ステップ1810では図16に基づいて現在の機関回転数NEに応じた回転数補正係数tVNEを算出する。そして、この現在の機関回転数に基づく回転数補正係数tVNEを用いて、基本補正量VVTR0 の値を再度補正する。すなわち、VVTR0 に補正係数tVNEを乗じた値を用いて求めた値を作動速度補正量VVTRとしてステップ1811以下のバルブタイミング補正を行う。
【0086】
このように、補正量VVTR0 算出時とバルブタイミング補正時とに、それぞれ機関回転数を用いて補正を行うようにしたことにより、機関回転数の変化にかかわらず正確に可変バルブタイミング機構作動速度に基づく補正を行うことが可能となる。例えば、機関高回転時に算出したtVVTR(図17ステップ1711、1713)の値は、高回転時の比較的大きな回転数補正係数tVNE(図16)により除した値がVVTR0 として記憶され、機関低回転時にバルブタイミング補正(図18、ステップ1811)を行う場合には、このVVTR0 に低回転時の比較的小さな補正係数tVNEを乗じた値VVTRを制御に使用する(図18、ステップ1810a)ことになる。このため、バルブタイミング補正に使用するVVTRは比較的小さな値となり、現在の機関回転数に対応したバルブタイミング補正を行うことができる。
【0087】
このように、本実施形態によれば、検出した可変バルブタイミング機構の作動速度を機関の回転数に応じて補正することにより、より正確にバルブオーバラップ量の補正を行うことが可能となる。
【0088】
【発明の効果】
各請求項記載の発明によれば、機関低温時に真に必要な場合にのみバルブオーバラップ量を低減することが可能となり、不必要な機関出力の低下を防止することができるという共通の効果を奏する。
【図面の簡単な説明】
【図1】本発明のバルブタイミング制御装置を4サイクルエンジンの吸気弁に適用した実施例の概略構成を示す図である。
【図2】吸気弁と排気弁との一般的な開閉時期を模式的に示す図である。
【図3】機関の暖機完了後の基本バルブタイミング値の設定例を示す図である。
【図4】バルブタイミングの温度補正量と機関冷却水温度との関係を示す図である。
【図5】燃料温度変化によるタンク内圧力の変化を説明する図である。
【図6】燃料性状判定ルーチンを示すフローチャートの一部である。
【図7】燃料性状判定ルーチンを示すフローチャートの一部である。
【図8】燃料性状基本学習値とタンク内圧力変化との関係を示すグラフである。
【図9】燃料学習補正係数の燃料残量による補正を示すグラフである。
【図10】バルブタイミング制御ルーチンの一実施形態のフローチャートである。
【図11】燃料性状補正量の設定を示すグラフである。
【図12】可変バルブタイミング機構作動速度に基づく補正量の算出ルーチンの一実施形態を示すフローチャートである。
【図13】作動速度補正量の設定を示すグラフである。
【図14】バルブタイミング制御ルーチンの一実施形態を示すフローチャートである。
【図15】機関回転数による可変バルブタイミング機構作動速度の変化を説明する図である。
【図16】機関回転数と回転数補正係数との関係を示すグラフである。
【図17】機関回転数を考慮した作動速度補正量の算出ルーチンを示すフローチャートである。
【図18】バルブタイミング制御ルーチンの一実施形態を示すフローチャートである。
【符号の説明】
1…カムシャフト
10…可変バルブタイミング装置
30…制御回路
Claims (4)
- 内燃機関のバルブタイミングを変更することにより、内燃機関の運転状態に応じて機関のバルブオーバラップ量を調節し、機関低温時に機関高温時に較べて機関のバルブオーバラップ量を小さく設定するバルブタイミング制御装置において、
バルブタイミング変更時のバルブタイミング変化速度を検出する作動速度検出手段と、
機関低温時のバルブオーバラップ量を、前記バルブタイミング変化速度が大きいときに前記バルブタイミング変化速度が小さいときより大きくなるように補正する作動速度補正手段と、
を備えた内燃機関のバルブタイミング制御装置。 - 更に、機関回転数を検出する回転数検出手段を備え、機関低温時のバルブオーバラップ量を、機関回転数が高いときに機関回転数が低いときより大きくなるように補正する回転数補正手段を備えた請求項1に記載のバルブタイミング制御装置。
- 更に、機関の使用燃料の性状を判定する燃料判定手段と、
該燃料判定手段により、機関使用燃料が軽質燃料であると判断されたときに、機関のバルブオーバラップ量を機関使用燃料が重質燃料であると判定された場合に較べて大きくなるように補正する燃料補正手段と、
を備えた請求項1に記載のバルブタイミング制御装置。 - 前記燃料判定手段は、機関始動後の燃料タンク内の燃料温度の変化と燃料タンク内圧力の変化とに基づいて機関の使用燃料の性状を判定する、請求項3に記載のバルブタイミング制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP33608096A JP3663788B2 (ja) | 1996-12-16 | 1996-12-16 | 内燃機関のバルブタイミング制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP33608096A JP3663788B2 (ja) | 1996-12-16 | 1996-12-16 | 内燃機関のバルブタイミング制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10176557A JPH10176557A (ja) | 1998-06-30 |
| JP3663788B2 true JP3663788B2 (ja) | 2005-06-22 |
Family
ID=18295495
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP33608096A Expired - Fee Related JP3663788B2 (ja) | 1996-12-16 | 1996-12-16 | 内燃機関のバルブタイミング制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3663788B2 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3876648B2 (ja) | 2001-05-22 | 2007-02-07 | 日産自動車株式会社 | エンジンのバルブタイミング制御装置 |
| US6678608B2 (en) * | 2001-11-09 | 2004-01-13 | Ford Global Technologies, Llc | Robust interpolation method for improved automative engine control during transient engine operation |
| JP4151524B2 (ja) | 2003-08-28 | 2008-09-17 | 三菱自動車工業株式会社 | 内燃機関 |
| JP2005201068A (ja) | 2004-01-13 | 2005-07-28 | Denso Corp | 燃料判別装置 |
| US7063056B2 (en) | 2004-05-25 | 2006-06-20 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Valve timing control apparatus for engine |
| JP4677895B2 (ja) * | 2005-12-14 | 2011-04-27 | 日産自動車株式会社 | エンジンの制御方法及び制御装置 |
| JP2008196409A (ja) * | 2007-02-14 | 2008-08-28 | Toyota Motor Corp | 内燃機関の燃焼制御装置 |
| CN101960126B (zh) | 2007-11-13 | 2013-01-02 | 丰田自动车株式会社 | 用于内燃发动机的控制装置 |
| JP4502030B2 (ja) * | 2008-03-12 | 2010-07-14 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
| JP5056770B2 (ja) * | 2009-02-10 | 2012-10-24 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
| JP5512433B2 (ja) * | 2010-07-16 | 2014-06-04 | 本田技研工業株式会社 | 蒸発燃料処理装置 |
| JP6459461B2 (ja) * | 2014-12-11 | 2019-01-30 | 日産自動車株式会社 | 内燃機関のegr推定装置及び内燃機関のegr推定方法 |
| EP3505742A4 (en) * | 2016-10-28 | 2019-09-25 | Mazda Motor Corporation | CONTROL DEVICE OF A MOTOR WITH A VARIABLE VALVE CONTROL MECHANISM |
-
1996
- 1996-12-16 JP JP33608096A patent/JP3663788B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10176557A (ja) | 1998-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6109225A (en) | Valve timing control device for an internal combustion engine | |
| JP4989523B2 (ja) | 内燃機関の可変動弁システム及び内燃機関の制御装置 | |
| US7324889B2 (en) | Intake-air quantity control system of engine | |
| US7520261B2 (en) | Apparatus for and method of controlling intake operation of an internal combustion engine | |
| US8505505B2 (en) | Control apparatus and control method for internal combustion engine | |
| JP3663788B2 (ja) | 内燃機関のバルブタイミング制御装置 | |
| JPH08270470A (ja) | 内燃機関のバルブタイミング制御装置 | |
| JP4701871B2 (ja) | エンジンの制御装置 | |
| JP3522053B2 (ja) | 内燃機関の制御装置 | |
| US7426913B2 (en) | Intake valve control system and method for internal combustion engine | |
| JP3750157B2 (ja) | 内燃機関の燃料噴射量制御装置 | |
| JPWO2012063313A1 (ja) | エンジン | |
| JP3454082B2 (ja) | 内燃機関の燃料噴射制御装置 | |
| JPH10331670A (ja) | 内燃機関のバルブ特性制御装置 | |
| JP3351268B2 (ja) | 内燃機関のバルブタイミング制御装置 | |
| AU2005317727B2 (en) | Valve characteristic control apparatus for internal combustion engine | |
| JP5249814B2 (ja) | 可変動弁機構の制御装置 | |
| JP3771101B2 (ja) | 内燃機関の制御装置 | |
| JP3661321B2 (ja) | パワートレーンの制御装置 | |
| JPH09256880A (ja) | 内燃機関の制御装置 | |
| JP2010265832A (ja) | 内燃機関の制御装置 | |
| JP4985465B2 (ja) | 内燃機関の制御方法および内燃機関の制御システム | |
| JP2010077813A (ja) | 内燃機関の制御装置 | |
| JP2001254639A (ja) | 内燃機関のバルブ特性制御装置 | |
| JP2003328791A (ja) | 内燃機関の可変動弁装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041126 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20041130 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050131 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050308 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050321 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090408 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090408 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100408 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100408 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110408 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120408 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120408 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130408 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140408 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |