JP3698628B2 - トルク検出装置及び舵取装置 - Google Patents
トルク検出装置及び舵取装置 Download PDFInfo
- Publication number
- JP3698628B2 JP3698628B2 JP2000297372A JP2000297372A JP3698628B2 JP 3698628 B2 JP3698628 B2 JP 3698628B2 JP 2000297372 A JP2000297372 A JP 2000297372A JP 2000297372 A JP2000297372 A JP 2000297372A JP 3698628 B2 JP3698628 B2 JP 3698628B2
- Authority
- JP
- Japan
- Prior art keywords
- detected
- torque
- target
- input shaft
- steering
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 title claims description 143
- 230000000295 complement effect Effects 0.000 claims description 3
- 230000000694 effects Effects 0.000 description 8
- 230000002093 peripheral effect Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 7
- 239000000696 magnetic material Substances 0.000 description 6
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/08—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque
- B62D6/10—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits responsive only to driver input torque characterised by means for sensing or determining torque
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/101—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means
- G01L3/104—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means involving permanent magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/109—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving measuring phase difference of two signals or pulse trains
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/22—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers
- G01L5/221—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers to steering wheels, e.g. for power assisted steering
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Steering Mechanism (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Description
【発明の属する技術分野】
本発明は、回転体と、回転体が回転するに従って、検出される部位が周期的及び連続的に変化すべく、回転体に設けられた複数のターゲットと、ターゲットの部位を検出する1又は複数の検出手段とを、トーションバーにより連結された入力軸及び出力軸にそれぞれ備え、検出手段が検出した部位のトーションバーに生じた捩れによる差に基づき、入力軸に加わるトルクを検出するトルク検出装置、及びこのトルク検出装置の検出結果に基づいて電動モータを駆動し、操舵補助力を発生させる舵取装置に関するものである。
【0002】
【従来の技術】
自動車用の舵取装置に、電動モータを駆動して操舵補助を行ない、運転者の負担を軽減するものがある。これは、操舵輪(ステアリングホイール)に繋がる入力軸と、ピニオン及びラック等により操向車輪に繋がる出力軸と、入力軸及び出力軸を連結するトーションバーとを備え、トーションバーに生じる捩れによって、トルク検出装置が入力軸に加わる操舵トルクを検出し、トルク検出装置が検出した操舵トルクに基づき、出力軸に連動する操舵補助用の電動モータを駆動制御するものである。
【0003】
図7は、本出願人の特願平11−288882号出願における提案に基づくトルク検出装置の要部構成例を模式的に示した模式図である。このトルク検出装置は、舵取装置に使用した場合を示しており、上端部にステアリングホイール4が連結され、下端部にトーションバー5が連結されたステアリングシャフトの上部軸23(入力軸)の中間部6(回転体)の周面に沿わせて、所定の傾斜角を有して等間隔に、磁性材からなる例えば8本の突起物7(ターゲット)を設けてある。また、上部軸23が回転したときに、上部軸23の軸方向に移動する突起物7の近接する位置を検出する為に、MRセンサ1(磁気抵抗効果素子、検出手段)が中間部6と適当な隙間を空けて平行に設けられ、車体の動かない部位に固定されている。
【0004】
ステアリングシャフトの下部軸18(出力軸)は、上端部がトーションバー5に連結され、下端部がピニオン10に連結されている。上部軸23と同様に、下部軸18の中間部8(回転体)の周面に沿わせて、所定の傾斜角を有して等間隔に、磁性材からなる8本の突起物9を設けてある。また、下部軸18が回転したときに、下部軸18の軸方向に移動する突起物9の近接する位置を検出する為に、MRセンサ2(磁気抵抗効果素子、検出手段)が下部軸18と適当な隙間を空けて平行に設けられ、車体の動かない部位に固定されている。
【0005】
MRセンサ1は、電気角が360°異なる(つまり、隣合う異なる突起物7の近接する位置を検出する)センサ1A,1Bを内蔵して二重系を構成しており、センサ1A,1Bがそれぞれ検出した突起物7の近接する位置を示す検出信号V1A,V1Bはそれぞれ演算部3に与えられる。
MRセンサ2は、電気角が360°異なる(つまり、隣合う異なる突起物9の近接する位置を検出する)センサ2A,2Bを内蔵して二重系を構成しており、センサ2A,2Bがそれぞれ検出した突起物7の近接する位置を示す検出信号V2A,V2Bはそれぞれ演算部3に与えられる。
【0006】
MRセンサ1,2は、ステアリングホイール4に操舵トルクが加わらず、トーションバー5が捩じれていない状態で、検出信号V1A,V2Aが同位相となり、また、検出信号V1B,V2Bが同位相となるように設けられている。
トーションバー5の捩じれ角度は高々数度であり、演算部3は、検出信号V1A,V2A又は検出信号V1B,V2Bの差に基づき、操舵トルクを演算しそのトルク信号を出力する。
【0007】
このような構成のトルク検出装置は、上部軸23及び下部軸18が、45°回転する都度、センサ1A,1B及びセンサ2A,2Bの各検出面に最近接する突起物7及び突起物9が、上部軸23及び下部軸18の軸方向に往復移動する。センサ1A,1B及びセンサ2A,2Bの各検出面に最近接する突起物7及び突起物9の、上部軸23及び下部軸18の軸方向の位置と、上部軸23及び下部軸18の回転角度とは対応させることが出来る。
【0008】
従って、センサ1A,1B及びセンサ2A,2Bの各検出信号を、上部軸23及び下部軸18の45°毎の回転角度と直線的な関係になるように設定しておけば、センサ1A,1B及びセンサ2A,2Bの各検出信号の昇降回数を計数することを併用することにより、センサ1A,1B及びセンサ2A,2Bの各検出信号に基づいて、上部軸23及び下部軸18の回転角度を検出することが出来る。また、センサ1A,1B及びセンサ2A,2Bが、何れの突起物7及び突起物9の近接する位置を検出しているかを識別することも可能である。
【0009】
例えば、センサ1A,1B及びセンサ2A,2Bの各検出信号と、上部軸23及び下部軸18の回転角度(舵角)とが同様の直線的な関係になるように設定しておき、上部軸23及び下部軸18を回転させれば、センサ1A,1B及びセンサ2A,2Bの各検出信号は、45°周期の電圧波形を示し、センサ1A,1B及びセンサ2A,2Bの各検出信号により、それぞれ上部軸23及び下部軸18の回転角度を検出することが出来る。
【0010】
ここで、ステアリングホイール4に操舵トルクが加えられ、トーションバー5に捩じれ角度が生じていれば、センサ1Aと2Aとの各検出信号及びセンサ1Bと2Bとの各検出信号は、それぞれその捩じれ角度に応じた電圧差ΔVが生じるので、その電圧差ΔVを演算部3により演算することにより、その捩じれ角度が求まり、その操舵トルクを示すトルク信号を出力することが出来る。
【0011】
【発明が解決しようとする課題】
上述したトルク検出装置は、ステアリングシャフトの上部軸23にその中間部として回転体6を設け、また、下部軸18にその中間部として回転体8を設けて構成してあるが、回転体6及び回転体8の各回転軸は、それぞれ上部軸23及び下部軸18と同軸関係を精密に保って設けることは困難であり、強調して示すと、図8に示すように、回転体6及び回転体8の各回転軸は互いに屈折した関係になる。
【0012】
その為、MRセンサ1と突起物7との位置関係及びMRセンサ2と突起物9との位置関係は、回転体6及び回転体8の回転に応じて同様にはならず、各センサの検出信号は、強調して示すと、図9に示すように、回転体6,8が1回転する間に、全体に正弦波形を描くような回転振れが生じることになり、その結果、正確な操舵トルクを検出することが出来ないという問題がある。
【0013】
本発明は、上述したような事情に鑑みてなされたものであり、第1,2発明では、回転振れによる影響を抑制することが出来、より正確な操舵トルクを検出することが出来るトルク検出装置を提供することを目的とする。
第3発明では、第1,2発明に係るトルク検出装置を備えた舵取装置を提供することを目的とする。
【0014】
【課題を解決するための手段】
第1発明に係るトルク検出装置は、回転体と、該回転体が回転するに従って、検出される部位が周期的及び連続的に変化すべく、前記回転体に設けられた複数のターゲットと、該ターゲットの部位を検出する1又は複数の検出手段とを、トーションバーにより連結された入力軸及び出力軸にそれぞれ備え、前記検出手段が検出した部位の前記トーションバーに生じた捩れによる差に基づき、前記入力軸に加わるトルクを検出するトルク検出装置であって、前記検出手段が検出した部位に基づき、前記ターゲットを個々に識別する識別手段と、前記回転体が1回転したときに、前記検出手段が検出した部位を示す信号の前記ターゲット毎の各最大値又は各最小値に基づき、前記検出手段が検出した部位を補正すべき前記ターゲット毎の補正量を求める手段と、該手段が求めた各補正量を記憶する記憶手段と、前記検出手段が部位を検出したときに、検出した部位を、前記識別手段が識別したターゲットの、前記記憶手段が記憶する補正量により補正する手段とを備え、該手段が補正した部位に基づき、前記入力軸に加わるトルクを検出すべくなしてあることを特徴とする。
【0015】
このトルク検出装置では、トーションバーにより連結された入力軸及び出力軸がそれぞれ回転体を有し、複数のターゲットが、回転体が回転するに従って、検出される部位が周期的及び連続的に変化するように、回転体に設けられている。1又は複数の検出手段がターゲットの近接する部位を検出し、検出手段が検出した部位のトーションバーに生じた捩れによる差に基づき、入力軸に加わるトルクを検出する。
識別手段が、検出手段が検出した部位に基づき、ターゲットを個々に識別し、補正量を求める手段が、回転体が1回転したときに、検出手段が検出した部位を示す信号のターゲット毎の各最大値又は各最小値に基づき、検出手段が検出した部位を補正すべきターゲット毎の補正量を求める。
【0016】
記憶手段が、補正量を求める手段が求めた各補正量を記憶し、補正する手段は、検出手段が部位を検出したときに、その検出した部位を、識別手段が識別したターゲットの、記憶手段が記憶する補正量により補正し、補正する手段が補正した部位に基づき、入力軸に加わるトルクを検出する。
これにより、回転振れによる影響を抑制することが出来、より正確な操舵トルクを検出することが可能なトルク検出装置を実現することが出来る。
【0017】
第2発明に係るトルク検出装置は、回転体と、該回転体が回転するに従って、検出される部位が周期的及び連続的に変化すべく、前記回転体に設けられた複数のターゲットと、該ターゲットの部位を検出する1又は複数の検出手段とを、トーションバーにより連結された入力軸及び出力軸にそれぞれ備え、前記検出手段が検出した部位の前記トーションバーに生じた捩れによる差に基づき、前記入力軸に加わるトルクを検出するトルク検出装置であって、前記回転体が1回転したときに、前記検出手段が検出した部位を示す信号の前記ターゲット毎の各最大値又は各最小値に基づき、前記検出手段が検出した部位を補正すべく予め定められた前記ターゲット毎の補正量を記憶する記憶手段と、前記検出手段が検出した部位に基づき、前記ターゲットを個々に識別する識別手段と、前記検出手段が部位を検出したときに、検出した部位を、前記識別手段が識別したターゲットの、前記記憶手段が記憶する補正量により補正する手段とを備え、該手段が補正した部位に基づき、前記入力軸に加わるトルクを検出すべくなしてあることを特徴とする。
【0018】
このトルク検出装置では、トーションバーにより連結された入力軸及び出力軸がそれぞれ回転体を有し、複数のターゲットが、回転体が回転するに従って、検出される部位が周期的及び連続的に変化するように、回転体に設けられている。1又は複数の検出手段がターゲットの近接する部位を検出し、検出手段が検出した部位のトーションバーに生じた捩れによる差に基づき、入力軸に加わるトルクを検出する。
【0019】
記憶手段が、回転体が1回転したときに、検出手段が検出した部位を示す信号のターゲット毎の各最大値又は各最小値に基づき、検出手段が検出した部位を補正すべく予め定められたターゲット毎の補正量を記憶し、識別手段が、検出手段が検出した部位に基づき、ターゲットを個々に識別する。補正する手段が、検出手段が部位を検出したときに、その検出した部位を、識別手段が識別したターゲットの、記憶手段が記憶する補正量により補正し、補正する手段が補正した部位に基づき、入力軸に加わるトルクを検出する。
これにより、回転振れによる影響を抑制することが出来、より正確な操舵トルクを検出することが可能なトルク検出装置を実現することが出来る。
【0020】
第3発明に係る舵取装置は、操舵輪に繋がる入力軸と、前記操舵輪に加わる操舵トルクに基づき駆動制御される操舵補助用の電動モータと、該電動モータに連動する出力軸と、前記入力軸及び該出力軸を連結するトーションバーと、前記入力軸に加わる操舵トルクを検出する請求項1又は2に記載されたトルク検出装置とを備え、該トルク検出装置が検出した操舵トルクに基づき操舵補助すべくなしてあることを特徴とする。
【0021】
この舵取装置では、入力軸が操舵輪に繋がり、操舵補助用の電動モータが操舵輪に加わる操舵トルクに基づき駆動制御され、出力軸が電動モータに連動する。トーションバーが入力軸及び出力軸を連結し、請求項1又は2に記載されたトルク検出装置が、入力軸に加わる操舵トルクを検出し、そのトルク検出装置が検出した操舵トルクに基づき操舵補助する。
これにより、回転振れによる影響を抑制することが出来、より正確な操舵トルクを検出することが可能なトルク検出装置を備えた舵取装置を実現することが出来る。
【0022】
【発明の実施の形態】
以下に、本発明をその実施の形態を示す図面に基づいて説明する。
実施の形態1.
図1は、本発明に係るトルク検出装置の実施の形態の要部構成例を模式的に示した模式図である。このトルク検出装置は、舵取装置に使用した場合を示しており、上端部にステアリングホイール4が連結され、下端部にトーションバー5が連結されたステアリングシャフトの上部軸23(入力軸)の中間部6(回転体)の周面に沿わせて、所定の傾斜角を有して等間隔に、磁性材からなる例えば8本の突起物7(ターゲット)を設けてある。また、上部軸23が回転したときに、上部軸23の軸方向に移動する突起物7の近接する位置を検出する為に、MRセンサ1(磁気抵抗効果素子、検出手段)が中間部6と適当な隙間を空けて平行に設けられ、車体の動かない部位に固定されている。
【0023】
ステアリングシャフトの下部軸18(出力軸)は、上端部がトーションバー5に連結され、下端部がピニオン10に連結されている。上部軸23と同様に、下部軸18の中間部8(回転体)の周面に沿わせて等間隔に螺旋状に、磁性材からなる8本の突起物9を設けてある。また、下部軸18が回転したときに、下部軸18の軸方向に移動する突起物9の近接する位置を検出する為に、MRセンサ2(磁気抵抗効果素子、検出手段)が下部軸18と適当な隙間を空けて平行に設けられ、車体の動かない部位に固定されている。
【0024】
MRセンサ1は、電気角が360°異なる(つまり、隣合う異なる突起物7の近接する位置を検出する)センサ1A,1Bを内蔵して二重系を構成しており、センサ1A,1Bがそれぞれ検出した突起物7の近接する位置を示す検出信号V1A,V1Bはそれぞれ信号処理部11に与えられる。
MRセンサ2は、電気角が360°異なる(つまり、隣合う異なる突起物9の近接する位置を検出する)センサ2A,2Bを内蔵して二重系を構成しており、センサ2A,2Bがそれぞれ検出した突起物7の近接する位置を示す検出信号V2A,V2Bはそれぞれ信号処理部11に与えられる。
【0025】
MRセンサ1,2は、ステアリングホイール4に操舵トルクが加わらず、トーションバー5が捩じれていない状態で、検出信号V1A,V2Aが同位相となり、また、検出信号V1B,V2Bが同位相となるように設けられている。
トーションバー5の捩じれ角度は高々数度であり、信号処理部11は、メモリ12に記憶してある補正量により、検出信号V1A,V2A,1B,V2Bを補正し、補正した検出信号V1A,V2A又は検出信号V1B,V2Bの差に基づき、操舵トルクを演算しそのトルク信号を出力する。
【0026】
以下に、このような構成のトルク検出装置の動作を説明する。
このトルク検出装置は、上部軸23及び下部軸18が、45°回転する都度、センサ1A,1B及びセンサ2A,2Bの各検出面に最近接する突起物7及び突起物9が、上部軸23及び下部軸18の軸方向に往復移動する。センサ1A,1B及びセンサ2A,2Bの各検出面に最近接する突起物7及び突起物9の、上部軸23及び下部軸18の軸方向の位置と、上部軸23及び下部軸18の回転角度とは対応させることが出来る。
【0027】
従って、センサ1A,1B及びセンサ2A,2Bの各検出信号を、上部軸23及び下部軸18の45°毎の回転角度と直線的な関係になるように設定しておけば、センサ1A,1B及びセンサ2A,2Bの各検出信号の昇降回数を計数することを併用することにより、センサ1A,1B及びセンサ2A,2Bの各検出信号に基づき、上部軸23及び下部軸18の回転角度を検出することが出来る。また、センサ1A,1B及びセンサ2A,2Bが、何れの突起物7及び突起物9の近接する位置を検出しているかを識別することも可能である。
【0028】
例えば、センサ1A,1B及びセンサ2A,2Bの各検出信号と、上部軸23及び下部軸18の回転角度(舵角)とが同様の直線的な関係になるように設定しておき、上部軸23及び下部軸18を回転させれば、センサ1A,1B及びセンサ2A,2Bの各検出信号は、45°周期の電圧波形を示し、センサ1A,1B及びセンサ2A,2Bの各検出信号により、それぞれ上部軸23及び下部軸18の回転角度を検出することが出来る。
【0029】
ここで、ステアリングホイール4に操舵トルクが加えられ、トーションバー5に捩じれ角度が生じていれば、センサ1Aと2Aとの各検出信号及びセンサ1Bと2Bとの各検出信号は、その捩じれ角度に応じた電圧差ΔVが生じるので、その電圧差ΔVを信号処理部11により演算することにより、その捩じれ角度が求まり、その操舵トルクを示すトルク信号を出力することが出来る。
【0030】
図2は、このトルク検出装置のセンサ1A,1B,2A,2Bの各検出信号の内、1つの検出信号についての回転振れによる影響を補正する動作を示すフローチャートである。以下に、このフローチャートを参照しながら、回転振れを補正する動作を説明する。
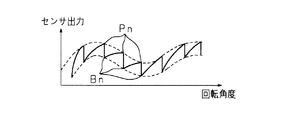
このトルク検出装置の信号処理部11は、運転者から指示があったとき又は随時、回転振れを補正する動作を行う。信号処理部11は、先ず、パラメータをリセットして初期化を行った(S2)後、センサ出力(検出信号)を読込む(S4)。信号処理部11は、読込んだ検出信号からステアリングホイール4の回転方向を検出し(S6)、その回転方向が前回検出した回転方向と逆方向でなければ(S8)、図9に示すような、突起物7,9の1つであるターゲットTnの近接する位置を検出した検出信号のピーク値Pnを検出する動作を行う(S10)。尚、ピーク値Pnに代えてボトム値Bnを検出して使用しても良い。
【0031】
ステアリングホイール4の回転方向の判定(S6)、及びピーク値Pn又はボトム値Bnの検出(S10)は、複数回連続して読込んだ(S4)検出信号の差に基づいて行う。
信号処理部11は、ターゲットTnの近接する位置を検出した検出信号のピーク値Pnを検出する動作を行い(S10)、ピーク値Pnを検出しなければ(S12)、次の検出信号の読込みを行う(S4)。
信号処理部11は、検出した(S6)回転方向が前回検出した回転方向と逆方向であれば(S8)、パラメータをリセットして初期化を行い(S2)、回転振れを補正する動作を最初からやり直す。
【0032】
信号処理部11は、ピーク値Pnを検出する動作を行い(S10)、ピーク値Pnを検出すれば(S12)、ターゲットTnの近接する位置を検出した検出信号のピーク値Pnを一時記憶し(S14)、パラメータnに1を加算する(S16)。
信号処理部11は、1を加算した(S16)パラメータnが7であるか否かを判定し(S18)、パラメータnが7でなければ、次の検出信号の読込みを行う(S4)。
【0033】
信号処理部11が、パラメータnが7であるか否かを判定し、パラメータnが7であれば(S18)、ステアリングホイール4が同一方向に1回転する間の、ターゲットT0〜T7による検出信号の各ピーク値P0〜P7を求めたことになる。
次に、信号処理部11は、各ピーク値P0〜P7の平均Paを求める演算Pa=(P0+P1+‥‥+P7)/8を行う(S20)。
【0034】
次に、信号処理部11は、求めた(S20)平均Paと各ターゲットT0〜T7における各ピーク値P0〜P7との差を求める演算を行い、各ターゲットT0〜T7における各偏差D0〜D7を求め(S22)、メモリ12に記憶して(S24)リターンする。
これにより、図4に示すように、検出信号の各ターゲットT0〜T7における回転振れの各補正量を、平均Paと各ターゲットT0〜T7における各ピーク値P0〜P7との各偏差D0〜D7として求めることが出来る。
【0035】
信号処理部11は、上述した回転振れを補正する動作を、センサ1A,1B,2A,2Bの各検出信号について実行し、各検出信号における各偏差D0〜D7を求め(S22)、メモリ12に記憶しておく(S24)。
尚、上述した回転振れを補正する動作を、トルク検出装置の組立て時に行い、メモリ12をROMとして、各検出信号における各偏差D0〜D7をそのROMに記憶するようにしても良い。
【0036】
図3は、実際の車両運転時において、このトルク検出装置のセンサ1A,1B,2A,2Bの各センサ出力(検出信号)の内、1つのセンサ出力についての回転振れによる影響を補正する動作を示すフローチャートである。以下に、このフローチャートを参照しながら、センサ出力の回転振れを補正する動作を説明する。
このトルク検出装置の信号処理部11は、先ず、センサ出力So(検出信号)を読込み(S30)、読込んだセンサ出力SoからターゲットTnを識別する(S32)。
ターゲットTnの識別(S32)は、ターゲットによるセンサ出力Soのピークを検出し、その検出したピークが、中点から何れの方向へ幾つ目であるかを記憶しておくことにより行う。
【0037】
次に、信号処理部11は、識別した(S32)ターゲットTnにおける補正値Dnを、メモリ12から読込み(S34)、So−Dnを演算して補正済センサ出力Socを求める(S36)。
信号処理部11は、求めた(S36)補正済センサ出力Socを一時記憶して(S38)リターンする。
信号処理部11は、上述した、回転振れによる影響を補正する動作を、センサ1A,1B,2A,2Bの各センサ出力(検出信号)について実行する。これにより、センサ1A,1B,2A,2Bの各センサ出力は、図5に示すように、回転体6,8が1回転する間に回転振れが生じることがなく、正確な操舵トルクを演算し出力することが出来る。
【0038】
実施の形態2.
図6は、本発明に係る舵取装置の実施の形態2の要部構成を示す縦断面図である。この舵取装置は、上端部にステアリングホイール4(操舵輪)が取付けられる上部軸23を備え、上部軸23の下端部には、第1ダウエルピン14を介して筒状の入力軸15及びこれの内側に挿入されるトーションバー5の上端部が連結されている。トーションバー5の下端部には、第2ダウエルピン17を介して筒状の出力軸18が連結されており、上部軸23、入力軸15及び出力軸18が軸受19,20,21を介してハウジング22内にそれぞれ回転が可能に支持されている。
【0039】
このハウジング22内には、前記トーションバー5を介して連結される入力軸15及び出力軸18の相対変位量により操舵トルクを検出するトルク検出装置13と、トルク検出装置13の検出結果に基づいて駆動される操舵補助用の電動モータ24の回転を減速して、前記出力軸18に伝達する減速機構25とを備え、ステアリングホイール4の回転に応じた舵取機構の動作を前記電動モータ24の回転により補助し、舵取の為の運転者の労力負担を軽減するように構成されている。出力軸18の下端部は、ユニバーサルジョイントを介してラックピニオン式の舵取機構に連結されている。
【0040】
トルク検出装置13は、前記入力軸15の周面6(回転体)に沿わせて、所定の傾斜角を有して等間隔に、磁性材からなる例えば8本の突起物7を設けてあり、入力軸15が回転したときに、入力軸15の軸方向に移動する突起物7の近接する位置を検出する為に、MRセンサ1(磁気抵抗効果素子、検出手段)が入力軸15と適当な隙間を空けて平行に設けられ、車体の動かない部位に固定されている。
MRセンサ1は、電気角が360°異なる(つまり、隣合う異なる突起物7の近接する位置を検出する)2つのセンサを内蔵して二重系を構成しており、2つのセンサがそれぞれ検出した突起物7の近接する位置を示す検出信号は、それぞれ図示しない信号処理部に与えられる。
【0041】
出力軸18は、入力軸15と同様に、出力軸18の周面8(回転体)に沿わせて、所定の傾斜角を有して等間隔に、磁性材からなる例えば8本の突起物9を設けてある。また、出力軸18が回転したときに、出力軸18の軸方向に移動する突起物9の近接する位置を検出する為に、MRセンサ2(磁気抵抗効果素子、検出手段)が出力軸18と適当な隙間を空けて平行に設けられ、車体の動かない部位に固定されている。
MRセンサ2は、電気角が360°異なる(つまり、隣合う異なる突起物9の近接する位置を検出する)2つのセンサを内蔵して二重系を構成しており、2つのセンサがそれぞれ検出した突起物9の近接する位置を示す検出信号は、それぞれ図示しない信号処理部に与えられる。
【0042】
以下に、このような構成の舵取装置の動作を説明する。
トーションバー5が捩れずに入力軸15及び出力軸18が回転する場合には、入力軸15、出力軸18及びトーションバー5は一体的に回転する。
入力軸15及び出力軸18が回転するのに応じて、MRセンサ1及び2の各2つのセンサの検出面に最近接する突起物7及び9が、入力軸15及び出力軸18の軸方向に移動する。突起物7及び9は、入力軸15及び出力軸18の周面6及び8に沿わせて、所定の傾斜角を有して等間隔に設けてあるので、MRセンサ1及び2の各2つのセンサの検出面に最近接する突起物7及び9の、入力軸15及び出力軸18の軸方向の位置と、入力軸15及び出力軸18の回転角度とを対応させることが出来る。
【0043】
例えば、MRセンサ1及び2の各2つのセンサの各出力電圧と、入力軸15及び出力軸18の回転角度(舵角)とが同様の直線的な関係になるように設定しておき、入力軸15及び出力軸18を1回転させれば、図5に示すように、MRセンサ1及び2の各2つのセンサの出力は、45°周期の電圧波形を示す。
このとき、信号処理部は、実施の形態1において説明したように、周面6,8(回転体)の回転振れによる影響を補正する。
【0044】
ステアリングホイール4に操舵トルクが加えられ、トーションバー5が捩れて入力軸15及び出力軸18が回転する場合には、MRセンサ1及び2の各センサの出力電圧は、その捩じれ角度に応じた電圧差が生じる。MRセンサ1及び2の各2つのセンサの出力電圧は、各出力ケーブルを通じて、図示しない信号処理部に与えられ、信号処理部は、実施の形態1において説明したように、各センサの出力電圧の、周面6,8(回転体)の回転振れによる影響を補正し、それらの補正した出力電圧の差を算出することにより、その操舵トルクに応じた信号を出力することが出来る。
【0045】
【発明の効果】
第1,2発明に係るトルク検出装置によれば、回転振れによる影響を抑制することが出来、より正確な操舵トルクを検出することが可能なトルク検出装置を実現することが出来る。
【0046】
第3発明に係る舵取装置によれば、回転振れによる影響を抑制することが出来、より正確な操舵トルクを検出することが可能なトルク検出装置を備えた舵取装置を実現することが出来る。
【図面の簡単な説明】
【図1】本発明に係るトルク検出装置の実施の形態の要部構成例を模式的に示した模式図である。
【図2】本発明に係るトルク検出装置の各センサの各検出信号の内、1つの検出信号についての回転振れによる影響を補正する動作を示すフローチャートである。
【図3】車両運転時において、本発明に係るトルク検出装置の各センサ出力の内、1つのセンサ出力についての回転振れによる影響を補正する動作を示すフローチャートである。
【図4】本発明に係るトルク検出装置の動作を説明する為の説明図である。
【図5】本発明に係るトルク検出装置の動作を説明する為の説明図である。
【図6】本発明に係る舵取装置の実施の形態の要部構成を示す縦断面図である。
【図7】従来のトルク検出装置の要部構成例を模式的に示した模式図である。
【図8】従来のトルク検出装置の動作を説明する為の説明図である。
【図9】従来のトルク検出装置の動作を説明する為の説明図である。
【符号の説明】
1,2 MRセンサ(磁気抵抗効果素子、検出手段)
1A,1B,2A,2B センサ
4 ステアリングホイール(操舵輪)
5 トーションバー
6,8 中間部(回転体、周面)
7,9 突起物(ターゲット)
11 信号処理部(求める手段、識別手段、補正する手段)
12 メモリ(記憶手段)
13 トルク検出装置
15 入力軸
18 下部軸(出力軸)
23 上部軸(入力軸)
24 電動モータ
Claims (3)
- 回転体と、該回転体が回転するに従って、検出される部位が周期的及び連続的に変化すべく、前記回転体に設けられた複数のターゲットと、該ターゲットの部位を検出する1又は複数の検出手段とを、トーションバーにより連結された入力軸及び出力軸にそれぞれ備え、前記検出手段が検出した部位の前記トーションバーに生じた捩れによる差に基づき、前記入力軸に加わるトルクを検出するトルク検出装置であって、
前記検出手段が検出した部位に基づき、前記ターゲットを個々に識別する識別手段と、前記回転体が1回転したときに、前記検出手段が検出した部位を示す信号の前記ターゲット毎の各最大値又は各最小値に基づき、前記検出手段が検出した部位を補正すべき前記ターゲット毎の補正量を求める手段と、該手段が求めた各補正量を記憶する記憶手段と、前記検出手段が部位を検出したときに、検出した部位を、前記識別手段が識別したターゲットの、前記記憶手段が記憶する補正量により補正する手段とを備え、該手段が補正した部位に基づき、前記入力軸に加わるトルクを検出すべくなしてあることを特徴とするトルク検出装置。 - 回転体と、該回転体が回転するに従って、検出される部位が周期的及び連続的に変化すべく、前記回転体に設けられた複数のターゲットと、該ターゲットの部位を検出する1又は複数の検出手段とを、トーションバーにより連結された入力軸及び出力軸にそれぞれ備え、前記検出手段が検出した部位の前記トーションバーに生じた捩れによる差に基づき、前記入力軸に加わるトルクを検出するトルク検出装置であって、
前記回転体が1回転したときに、前記検出手段が検出した部位を示す信号の前記ターゲット毎の各最大値又は各最小値に基づき、前記検出手段が検出した部位を補正すべく予め定められた前記ターゲット毎の補正量を記憶する記憶手段と、前記検出手段が検出した部位に基づき、前記ターゲットを個々に識別する識別手段と、前記検出手段が部位を検出したときに、検出した部位を、前記識別手段が識別したターゲットの、前記記憶手段が記憶する補正量により補正する手段とを備え、該手段が補正した部位に基づき、前記入力軸に加わるトルクを検出すべくなしてあることを特徴とするトルク検出装置。 - 操舵輪に繋がる入力軸と、前記操舵輪に加わる操舵トルクに基づき駆動制御される操舵補助用の電動モータと、該電動モータに連動する出力軸と、前記入力軸及び該出力軸を連結するトーションバーと、前記入力軸に加わる操舵トルクを検出する請求項1又は2に記載されたトルク検出装置とを備え、該トルク検出装置が検出した操舵トルクに基づき操舵補助すべくなしてあることを特徴とする舵取装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000297372A JP3698628B2 (ja) | 2000-09-28 | 2000-09-28 | トルク検出装置及び舵取装置 |
| US09/960,499 US6554096B2 (en) | 2000-09-28 | 2001-09-24 | Torque detecting apparatus and steering apparatus |
| EP01122579A EP1193158A3 (en) | 2000-09-28 | 2001-09-25 | Torque detecting apparatus and steering apparatus |
| KR1020010060088A KR20020025776A (ko) | 2000-09-28 | 2001-09-27 | 토오크검출장치 및 조향장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000297372A JP3698628B2 (ja) | 2000-09-28 | 2000-09-28 | トルク検出装置及び舵取装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002107243A JP2002107243A (ja) | 2002-04-10 |
| JP3698628B2 true JP3698628B2 (ja) | 2005-09-21 |
Family
ID=18779496
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000297372A Expired - Fee Related JP3698628B2 (ja) | 2000-09-28 | 2000-09-28 | トルク検出装置及び舵取装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6554096B2 (ja) |
| EP (1) | EP1193158A3 (ja) |
| JP (1) | JP3698628B2 (ja) |
| KR (1) | KR20020025776A (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3681324B2 (ja) | 2000-07-14 | 2005-08-10 | 光洋精工株式会社 | トルク検出装置及び電動パワーステアリング装置 |
| FR2821931B1 (fr) * | 2001-03-09 | 2003-05-09 | Roulements Soc Nouvelle | Dispositif de mesure analogique d'un couple de torsion, colonne de direction et module le comprenant |
| US7454986B2 (en) * | 2002-09-06 | 2008-11-25 | Volkswagen Aktiengesellschaft | Device and method for measuring torque in an electromechanical steering system |
| DE10244068A1 (de) * | 2002-09-06 | 2004-03-11 | Volkswagen Ag | Vorrichtung und Verfahren zur Drehmomentmessung für eine elektromechanische Lenkung |
| US6983817B2 (en) * | 2003-03-18 | 2006-01-10 | Toyoda Koki Kabushiki Kaisha | Power steering device |
| DE102009000165A1 (de) * | 2009-01-13 | 2010-07-15 | Zf Lenksysteme Gmbh | Verfahren zum Betreiben einer Hilfskraftlenkung |
| KR101484759B1 (ko) | 2012-01-16 | 2015-01-20 | 주식회사 만도 | 전동식 파워 스티어링 시스템 및 그의 조향각 계산 방법 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01133338A (ja) | 1987-11-18 | 1989-05-25 | Mitsubishi Electric Corp | ヒートシンク |
| JP2981625B2 (ja) * | 1991-07-09 | 1999-11-22 | 光洋精工株式会社 | 動力舵取装置 |
| US5473539A (en) * | 1992-12-11 | 1995-12-05 | Honda Giken Kogyo Kabushiki Kaisha | Electrically operated power steering apparatus |
| US5712563A (en) * | 1994-06-13 | 1998-01-27 | Honda Giken Kogyo Kabushiki Kaisha | Steering torque sensor utilizing a displacement detector having a pulse power supply |
| JP2937314B2 (ja) * | 1994-06-27 | 1999-08-23 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP3405052B2 (ja) * | 1996-03-21 | 2003-05-12 | 日産自動車株式会社 | 駆動力配分制御装置 |
| JP3128530B2 (ja) * | 1997-03-21 | 2001-01-29 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP3128531B2 (ja) * | 1997-04-03 | 2001-01-29 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP3390333B2 (ja) * | 1997-08-27 | 2003-03-24 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| EP0989046A1 (en) * | 1998-09-11 | 2000-03-29 | Koyo Seiko Co., Ltd. | Torque sensor and steering apparatus |
| WO2000062031A1 (en) | 1999-04-07 | 2000-10-19 | Koyo Seiko Co., Ltd. | Rotation angle detector, torque detector and steering device |
| JP2000352502A (ja) | 1999-04-07 | 2000-12-19 | Koyo Seiko Co Ltd | 回転角度検出装置、トルクセンサ及び舵取装置 |
| JP2001201313A (ja) * | 1999-10-15 | 2001-07-27 | Koyo Seiko Co Ltd | 回転角度検出装置、トルク検出装置及び舵取装置 |
| JP3715858B2 (ja) * | 2000-01-18 | 2005-11-16 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| JP3675692B2 (ja) * | 2000-03-17 | 2005-07-27 | 光洋精工株式会社 | 電動パワーステアリング装置 |
| JP3781653B2 (ja) * | 2001-03-12 | 2006-05-31 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
-
2000
- 2000-09-28 JP JP2000297372A patent/JP3698628B2/ja not_active Expired - Fee Related
-
2001
- 2001-09-24 US US09/960,499 patent/US6554096B2/en not_active Expired - Fee Related
- 2001-09-25 EP EP01122579A patent/EP1193158A3/en not_active Withdrawn
- 2001-09-27 KR KR1020010060088A patent/KR20020025776A/ko not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| EP1193158A2 (en) | 2002-04-03 |
| JP2002107243A (ja) | 2002-04-10 |
| EP1193158A3 (en) | 2005-02-09 |
| US6554096B2 (en) | 2003-04-29 |
| US20020036112A1 (en) | 2002-03-28 |
| KR20020025776A (ko) | 2002-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3784248B2 (ja) | 回転角度検出装置、トルクセンサ及び舵取装置 | |
| KR100792108B1 (ko) | 차량용 조타 장치 | |
| US6948382B2 (en) | Angle detection device and torque sensor incorporating angle detection device | |
| JP2013257231A (ja) | 回転角センサ | |
| JP2001521163A (ja) | 自動車用電動パワーステアリング | |
| EP2743645B1 (en) | Phase difference detector and rotation angle detection device including the same | |
| JP3698628B2 (ja) | トルク検出装置及び舵取装置 | |
| US9658050B2 (en) | Rotation angle detection device | |
| JP2003083823A (ja) | 回転角検出装置、トルク検出装置及び舵取装置 | |
| JP2003344188A (ja) | 回転角度検出装置及びトルク検出装置 | |
| JP2007263693A (ja) | 舵角検出装置 | |
| JP4120425B2 (ja) | 回転角度検出装置及びトルク検出装置 | |
| JP5382187B2 (ja) | 回転角検出装置、および、これを用いた電動パワーステアリング装置 | |
| JP2008509382A (ja) | ステアリングホイール角度を検出する装置と方法 | |
| JP4830209B2 (ja) | 最大値・最小値検出方法、最大値・最小値検出装置、その最大値・最小値検出装置を備えたトルク検出装置及び舵取装置 | |
| JP2011080783A (ja) | 相対角度検出装置、回転角度検出装置及びパワーステアリング装置 | |
| JP6202302B2 (ja) | 回転角検出装置 | |
| US20130282239A1 (en) | Torque detecting device and electric power steering system | |
| JP2002107242A (ja) | トルク検出装置及び舵取装置 | |
| JP2003004438A (ja) | 回転角度検出装置及び舵取装置 | |
| JP3956734B2 (ja) | トルク検出装置及び舵取装置 | |
| JP2005010015A (ja) | 角度センサ、角度・トルクセンサ、及び、それを用いた電動パワーステアリング装置 | |
| JP2002116095A (ja) | 回転角度検出装置、トルク検出装置及び舵取装置 | |
| JP2003050166A (ja) | トルク検出装置及び舵取装置 | |
| JP2002340514A (ja) | 回転角度検出装置、トルク検出装置及び舵取装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041022 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050329 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050525 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050705 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050705 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |