JP3966438B2 - 回転型アクチュエータ - Google Patents
回転型アクチュエータ Download PDFInfo
- Publication number
- JP3966438B2 JP3966438B2 JP19028399A JP19028399A JP3966438B2 JP 3966438 B2 JP3966438 B2 JP 3966438B2 JP 19028399 A JP19028399 A JP 19028399A JP 19028399 A JP19028399 A JP 19028399A JP 3966438 B2 JP3966438 B2 JP 3966438B2
- Authority
- JP
- Japan
- Prior art keywords
- teeth
- tooth
- oscillating
- rotary actuator
- plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000007246 mechanism Effects 0.000 claims description 41
- 239000012530 fluid Substances 0.000 claims description 8
- 230000000737 periodic effect Effects 0.000 claims description 4
- 230000002093 peripheral effect Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000010355 oscillation Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 230000009467 reduction Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000001125 extrusion Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images







Landscapes
- Actuator (AREA)
- Retarders (AREA)
Description
【発明の属する技術分野】
本発明は回転型アクチュエータ、特に、低速かつ高出力を得るのに適した回転型アクチュエータに関する。
【0002】
【従来の技術】
電動モータあるいは流体を駆動源とするタービンモータやベーンモータのように、使用目的に応じた種々の回転型アクチュエータが知られている。従来のこれら回転型アクチュエータは一般に回転速度が速く、ロボットのように比較的ゆっくりとした動きを求められるものへアクチュエータとして使用する場合には、減速器との組み合わせが必要とされ、全体として大きな容積とならざるを得なかった。
【0003】
流体を駆動源とするアクチュエータであって比較的低速作動に適したものとして、
図10a、10bに示しように、ゴム製のワブルジェネレータ100、内歯車を有する金属製のワブルリング115、上記ワブルリング115の内歯車と噛み合う外歯車114、上記外歯車114と固着された出力軸106、モータのケーシングを構成する部材103、112、104、上記出力軸106の回転を支持するベアリング113a、113bなどから構成される液圧駆動アクチュエータがワブルモータとして知られている(特開平10−78010号公報、特開平11−93612号公報など参照)。
【0004】
上記のワブルモータでは、ワブルジェネレータ100の内周面とワブルリング115の外周面は接着されており、また、上記ワブルリング115の内歯車の歯数が上記外歯車114の歯数よりも多くされると共に、非駆動状態ではワブルリング115の内歯車と外歯車114の間には隙間が存在するようにされている。
ワブルジェネレータ100の内部には圧力室として作用する適数の空間102a、102b、102c、・・・、102fが周方向に形成されており、各圧力室はそれぞれチューブ105a、105b、・・・、105fを介して適宜の空圧源に接続している。そして、各チューブに介在する電磁弁(図示されない)を適宜開閉制御することにより、各圧力室102a、102b、・・・、102fの内圧は順に加圧されていき、それにより、ワブルリング115が公転し、出力軸106が自転するようにされる。
【0005】
すなわち、図示のワブルモータでは、ワブルジェネレータ100の内周面が加圧によって径方向に変形すると、それに伴ってワブルリング115も径方向に移動する(なお、図10は、いずれの圧力室も加圧していない状態を示している)。ここで例えば、圧力室102fを加圧すると、圧力室102fが膨張してワブルリング115が図で下の方へ押し出され、ワブルリング115の内周面に形成した内歯車が出力軸106に固定された外歯車114と接触し噛合する。各圧力室を順に加圧してゆくと、ワブルリング115はいわゆる公転運動を行うこととなり、ここで、上述したように、外歯車114とワブルリング115に形成された内歯車は歯数が異なるので、ワブルリング115の公転に伴い、上記2つの歯車の噛合いがずれてゆき、出力軸106が自転することとなる。その回転角度(回転速度)は、内歯車と外歯車の歯数の差及びワブルリング115の公転速度に依存することから、歯数の差をわずか、例えば1とすることにより、出力軸106の回転速度を非常に低速とすることができる。そのために、アクチュエータとして小形のものを容易に入手することができる利点がある。
また、いずれの圧力室も加圧しない状態では、出力軸106を自由回転状態としておくことができ、一方、特定の圧力室のみを加圧状態に維持することにより、制動状態としておくことが可能であり、アクチュエータとして高い操作性も期待できる。
【0006】
【発明が解決しようとする課題】
上記の形式のワブルモータは、エアーモータの不都合、すなわち、小形ではあるが高速回転での使用が前提とされていて、高トルク低回転での使用が求められる場合には、別途、減速器を外部に備えることを必要とするという不都合を、モータそのものの機構の中に減速機構を持たせることによって解消したものであり、小形であるというエアーモータ本来の特性を保ちながら高トルク低回転での使用を可能としている。
しかし、上記の形式のワブルモータは、その機構上、小形のモーターにのみ適しており、ゴム製のワブルジェネレータが周方向の回転反力を受ける部材の一つとして機能することから、ゴム(弾性体)が生成可能なせん断力に限界があるため、直径の大きい大形のワブルモータで大きなトルクを発生させることは困難である。
【0007】
ゴム製のワブルジェネレータに代えて、内歯車を持つリングを用い、該リングの外周面に、放射方向(半径方向)を作動方向とするエアーピストンなどを3個以上配置して、それを順次作動させることにより、高トルク(出力)発生可能な類似する回転アクチュエータが得ることができるが、放射方向にエアーピストンを配置することは、円周方向へ大型化し、また、いずれにしろ何らかの手段で転動するリングから固定出力軸まわりの回転を取り出す付加機構が必要となる。
本発明は、上記の事情に鑑みてなされたものであり、円周方向のサイズを制限しながら低速と高出力の双方を同時に満足することのできる、回転型アクチュエータを提供することを目的とする。
【0008】
【課題を解決するための手段】
上記の課題を解決するための本発明による回転型アクチュエータは、固定台に設けられた固定軸の先端に自在継ぎ手を介して揺動自在に支持され、かつ、該固定軸の軸心を中心として同心円状に形成された歯数Nの第1の歯を備えている揺動板と、軸方向の移動は阻止された状態で前記揺動板に対向して配置され、かつ、該対向面には前記揺動円盤の第1の歯と噛み合うことのできる歯数Mの第2の歯(但し、M≠N)を前記固定軸の軸心を中心として同心円状に備えている回転板と、前記揺動板に対して、その第1の歯と前記回転板に形成した第2の歯との噛み合い位置が連続して変位するように360度に亘る周期的な揺動運動を生じさせる揺動運動発生手段とを備えてなり、前記揺動板の360度に亘る1揺動周期により、第1の歯の歯数Nと第2の歯の歯数Mの差分の回転移動を前記回転板に生じさせるようにされていることを特徴とする。
【0009】
上記の構成であり、適宜の揺動運動発生手段により、前記揺動板に対してその第1の歯と前記回転板に形成した第2の歯との噛み合い位置が連続して変位するように360度の揺動運動を生じさせると、1揺動周期により、揺動板の第1の歯の歯数Nと回転板の第2の歯の歯数Mの差分の回転移動が回転板に生じる。揺動板の前記揺動運動を連続させることにより、回転板は前記歯数の差と揺動板の揺動周期速度に応じた速度で回転する。
【0010】
本発明による回転型アクチュエータの径方向の寸法は、基本的に揺動板及び回転板の直径のみに依存しており、容易に小型化することができると共に、必要に応じて大きな直径のものを設計でき、この場合も、噛み合う歯が揺動板及び回転板の外周に近い位置となるため、機構的に可能な最大のトルクを発生できる。また、出力(回転トルク)は、本質的に、揺動板に形成した第1の歯が回転板に形成した第2の歯を押し付ける力に依存しており、さらに、回転反力の支持も固定軸及び固定軸の先端に取り付ける自在継ぎ手部分で行うことができ、従来のように弾性体が介在するようなことはないので、揺動板に揺動運動を生じさせる揺動運動発生手段の出力を、ロスの少ない状態で回転板側に確実に伝達可能であり、容易に高出力(高トルク)、低回転の回転型アクチュエータを得ることができる。
【0011】
前記揺動運動発生手段は、揺動板をその第1の歯と回転板に形成した第2の歯との噛み合い位置が連続して変位するように360度に亘る周期的な揺動運動を生じさせうるものであれば任意であり制限はない。揺動運動発生手段は、固定台と揺動板との間に固定軸に対して回転対称に配置された3個以上の直動機構、例えば、流体駆動ピストン・シリンダ機構であり、その際に、該直動機構を所定の順番に作動状態とするためのシーケンス制御される作動機構が備えられる。直動機構は回転型アクチュエータの固定軸に平行な方向を作動方向としており、回転型アクチュエータの直径方向の寸法に影響を与えることはない。作動流体は、圧送される空気であってもよく液体であってもよい。
揺動運動発生手段は、複数個の電磁ソレノイドであってもよく、その際には、各ソレノイドを所定の順番にON−OFF状態とするためのシーケンス制御機構が備えられる。
【0012】
本発明に係る回転型アクチュエータにおいて、揺動板は、同じ形態の揺動板を回転板の両側面に、鏡面対称となるようにして配置されており、当然に回転板の両側面に前記第2の歯が等しく形成される。配置された2枚の揺動板のそれぞれの第1の歯が前記回転板の両側に形成した第2の歯とそれぞれ噛み合うこととなるが、その噛み合い点を、実質的に両面で合い対向する位置とすることにより、回転板に作用する軸方向の力を相殺することが可能となり、出力の増加と共に、振動の少ない運転が可能となる。
【0013】
本発明に係る回転型アクチュエータは多くの態様で使用できる。例えば、その回転板に歯車を装着して低速高出力モータとして利用してもよく、あるいは、回転板に円筒状のリムを取り付けてタイヤを装着することにより、直接、車両の駆動輪として使用することもできる。前者の場合は、エアー駆動としてロボットアームのアクチュエータなどとしての利用に好適であり、後者の場合は、水圧駆動として散水車の駆動輪などとしての利用に好適となる。
【0014】
【発明の実施の形態】
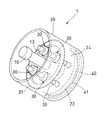
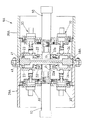
以下、図面を参照しながら、本発明による回転型アクチュエータの好ましい実施の形態を説明する。図1は本発明による回転型アクチュエータ1の全体を示す斜視図であり、図2はその中央断面図である。
図において、10は固定軸であり、回転型アクチュエータ1の使用時に、図示しない固定機枠側に直接あるいは後記する固定台13を介して定着される。固定軸10の先端には径方向のフランジ11を持つ円筒体12が螺合など適宜の手段により取り付けてあり、該円筒体12には自在継ぎ手20の支軸21が圧入されている。すなわち、支軸21の先端には、軸22aで中間リング22が回転支持され、該中間リング22に軸25で揺動円盤24を支持する従来知られた形式の自在継ぎ手20が備えられており、それにより揺動円盤24は固定軸10の軸心線を中心として任意の方向に揺動できるようにして装着されている。
【0015】
揺動円盤24の一方の面(図1では右側の面)には同心円状に歯数Nである第1の歯23(このような歯は一般にクラウンギアと呼ばれている)が形成されており、他方の面には、後記するピストン・シリンダ機構のピストン先端を受けるための凹所26が形成されている。
前記固定軸10にはねじ14により固定台13が定着されおり、該固定台13には4組の流体駆動のピストン・シリンダ機構30・・が、その作用線を前記固定軸10の軸心線方向に平行な方向として装着されている。なお、固定軸10と固定台13とは一体物であってもよい。各ピストン・シリンダ機構30は、シリンダ31と、シリンダ31内を往復動するピストン32と、先端にキャップ34を取り付けたピストン棒33とを備え、該キャップ34とシリンダ31の前壁との間にはバネ35が圧縮状態で介装されている。シリンダ31の後壁には空気供給室36が備えられ、そこを通して、図示しない圧空源からの加圧空気がシリンダ31内に供給される。
【0016】
4組のピストン・シリンダ機構30は同じ規格のものであり、加圧空気が供給されない状態では、各ピストン棒33の先端はバネ35の力により等しい圧力で前記揺動円盤24の裏面に常時圧接した状態とされ、その結果、図2に示すように、揺動円盤24は固定軸10の軸心に対して垂直な姿勢で保持される。加圧空気が供給されることにより、ピストン32は図で右方向に移動し、ピストン棒33の先端は前記揺動円盤24をさらに押圧する。従って、もし、1個のピストン・シリンダ機構30、図で上位に位置するピストン・シリンダ機構30aのみに加圧空気を供給して作動状態としたときには、揺動円盤24は前記自在継ぎ手20のジョイント部を支点として、図で上位が右方向に揺動し傾斜した姿勢となる。
【0017】
前記固定台13の外周には径方向の加重と軸方向の加重との双方を同時に支えることのできる環状をなすベアリング37のインナーレース38が適宜の手段により止着されており、該ベアリング37のアウターレースには、円筒39が軸心線を固定軸10の軸心線と同じとして止着されている。それにより、円筒39は固定軸10を軸心として自由に回転することができる一方、軸心線方向の移動は阻止された状態とされている。
【0018】
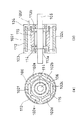
円筒39の前方端には、図3に示すように、一方の面に同心円状に、前記揺動円盤24に形成した第1の歯23に噛み合うことのできる歯数M(但し、M≠N、通常はM<N)である第2の歯41を形成した環状の回転板40が、前記固定軸10の軸心線に垂直な姿勢となるようにして、ねじ込みなど適宜の手段で止着されている。なお、図2に示すように、回転板40と揺動円盤24とは、揺動円盤24に形成した第1の歯23と回転板40に形成した第2の歯41とが互いに対向した位置となるようされている。また、前記回転板40の中央部分には、遮蔽板43がねじ44により止着されている。
【0019】
上記の回転型アクチュエータ1の作動について説明する。回転型アクチュエータ1の作動原理は、基本的には転動運動による減速機構によるものであり、固定軸10に自在継ぎ手20を介して非回動的に取り付けられた揺動円盤24に対して、その一側面に同心円状に形成した第1の歯23と前記回転板40にやはり同心円状に形成した第2の歯41との噛み合い位置が連続して変位しうるように、360度に亘る周期的な揺動運動を生じさせることにより、前記回転板40側に、前記第1の歯23の歯数Nと第2の歯41の歯数Mの差分の回転移動を生じさせるというものである。なお、第1の歯は第2の歯に揺動して噛み合うため、一般に第1の歯の歯数Nは第2の歯の歯数Mより大きくN>Mとされる。
【0020】
上述の回転型アクチュエータ1では、前記揺動円盤24の揺動運動は、揺動円盤24の裏面側に配置した4組のピストン・シリンダ機構30・・を順次作動状態とすることにより生じる。図4は、4組のピストン・シリンダ機構30a〜30dを順次作動状態とするためのシステム構成の一例であり、この例では、圧空源60からの加圧空気が管路51に送られており、管路51の4本の分岐にはそれぞれ常閉3ポート電磁弁52a〜52dが介装されていて、該電磁弁52a〜52dのON−OFFをコンピュータ70からのデジタル信号によりシーケンス制御することによって、各ピストン・シリンダ機構30a〜30dを規則性を持って順次作動させるようにしている。なお、図4において、61は圧力計、62は調圧弁、71は制御用のディスプレイである。
【0021】
図4に示す状態は、電磁弁52a〜52dはすべてOFFとされており、ピストン・シリンダ機構30a〜30dに加圧空気は送られず、各シリンダ室は大気圧とされている。図2にも示すように、この状態では、各ピストン棒33の先端はバネ35の力により等しい圧力で揺動円盤24の裏面に圧接しており、揺動円盤24は固定軸10の軸心に対して垂直な姿勢とされる。その姿勢では、前記第1の歯23と回転板40側の第2の歯41とは噛み合い状態になく、回転板40(及び円筒39)は、ベアリング37を介して、固定軸10に対して自由に回転できるフリーの状態となっている。
【0022】
コンピュータ70からの信号により例えば電磁弁52aが励磁されると、チャンネル(1)を介して加圧空気がピストン・シリンダ機構30aに送られ、ピストン32が図2で右側に移動して、揺動円盤24を自在継ぎ手20のジョイント部を支点として、図2で上位を右方向に傾斜させる。その傾斜により、揺動円盤24の第1の歯23が回転板40側の第2の歯41と噛み合った姿勢となる。この状態は、回転板40の固定軸10に対する相対回転が歯車同士の噛み合いにより規制された状態であり、ブレーキを掛けた状態に相当する。
【0023】
コンピュータ70からの信号により、例えば図4で反時計回りに、すなわち、電磁弁52a→52b→52c→52dの順で、4つの電磁弁のON−OFFを切り換える。それにより、4組のピストン・シリンダ機構には、30a→30b→30c→30dの順(チャンネル(1)から(4)の順)で順次加圧空気が供給され、また、大気に開放される。それにより、揺動円盤24は360度に亘る周期的な揺動運動を生じ、揺動円盤24の第1の歯23と前記回転板40に形成した第2の歯41との噛み合い位置は360度の範囲で連続して変位する。そして、第1の歯23の歯数Nと第2の歯41の歯数Mは相違しており、その差分の回転移動が回転板40側に発生する。継続して揺動円盤24に周期的な揺動運動を生じさせることにより、回転板40は連続して回転駆動し、回転型アクチュエータとしての機能を奏することとなる。
【0024】
例えば、第1の歯23の歯数Nを77、第2の歯41の歯数Mを76とすれば、揺動円盤24が一周期分揺動すると、歯数差分、つまり2π/77radだけ回転板40が回転する。従って、その値に揺動円盤24の揺動周波数を乗じることにより、単位時間当たりの回転数を求めることができる。また、第1の歯23の歯数Nと第2の歯41の歯数Mの差が正か負かにより、回転方向は逆転する。
【0025】
図5は、第1の歯23と第2の歯41の噛み合い部分を拡大して示している。本発明による回転型アクチュエータ1では、2枚の歯車は押し付けられながら噛み合うので、歯の形状は通常のインボリュート曲線などとは異なるが、ここでは二等辺三角形として表記している。
また、揺動円盤24から回転板40に伝達される力の大きさは圧力角αによって変化し、例えば、図中の左側にある揺動円盤24が力Finで押し付けられるとすると、回転板40には、回転方向に1/2・Fsin2αの力が、軸方向にはFsin2αの力が発生する。従って、使用目的に応じて圧力角αを選定すればよいが、最大トルクを発生させる場合には、α=π/4radとされる。
【0026】
上記の例では、揺動円盤24の揺動運動発生手段として、常閉3ポート電磁弁を持つピストン・シリンダ機構を4組使用するようにしているが、これは例示であり、他の形態であってもよい。例えば、ピストン・シリンダ機構の数は、上記のような単動押し出し型のシリンダの場合には、シリンダ数が3以上ないと必要とされる2自由度の揺動を発生できないので、3組以上であれば任意の組数であってよい。
【0027】
また、図示の4組のピストン・シリンダ機構を用いる場合に、図6aに示すように、一つのピストン・シリンダ機構だけを順次加圧して、シリンダの数と同じ4状態(π/2ピッチ)で1周期揺動を行うようにしてもよく、図6bのように、1つのシリンダが加圧されている場合と、2つのシリンダが加圧されている場合とを繰り返すことによって、8状態(π/4ピッチ)で1周期揺動するようにしてもよい。π/4radごとに揺動させる場合、例えば、616(77(歯数)×8)状態で回転板41が一回転(2π rad)する。これを利用してπ/380radごとに回転するステッピングモータとして本発明による回転型アクチュエータを利用することもできる。
【0028】
図7は、本発明による回転型アクチュエータ1の一つの利用態様を示している。ここでは、上記した回転型アクチュエータ1における円筒39の部分にリム80を取り付け、そこにタイヤ81を装着している。その駆動機構を複数個用意し、それぞれの固定軸10(あるいは固定台13)を車両のフレーム(不図示)(機枠に相当する)に固定することにより、回転型アクチュエータ1を、直接、当該車両の駆動輪として使用した車両が得られる。この場合に、駆動流体として加圧空気ではなく水圧を用いるようにすれば、例えば、散水用の水流の一部を回転型アクチュエータの駆動力として用いることができることから、散水車の駆動輪として有効に利用できる。
【0029】
なお、上記の説明では、揺動円盤24に形成される第1の歯23は固定軸10が位置する側とは反対側の面に形成されるものとしたが、反対の面(すなわち、ピストン・シリンダ機構30のピストン先端を受けるための凹所26が形成されている側の面)に第1の歯23を形成してもよい。そして、その場合には、前記環状の回転板40は、その第2の歯41が揺動円盤24の第1の歯23と噛み合うことができるようにして、前記ピストン・シリンダ機構30が位置する側(図1で揺動円盤24の左側)に対向配置される。この場合に、第1の歯23と第2の歯41との噛み合い位置は作動するピストン・シリンダ機構30と軸対称の位置となるが、この場合でも、回転型アクチュエータとして同じ機能が支障なく奏される。
【0030】
図8は、本発明による回転型アクチュエータの他の実施の形態を示す中央断面図である。ここでは、回転板40Aの両側面に第2の歯41、41が等しく形成されており、該回転板40Aの両側に、上記したのと同じ構成である、固定軸10、ピストン・シリンダ機構30、揺動円盤24などの駆動機構が、鏡面対称となるようにして配置されており、そこに、左右の円筒39A、39Aが装着されている。
【0031】
この回転型アクチュエータ1Aの作動態様は、図1〜図4で説明した回転型アクチュエータ1と基本的に同じであるが、鏡面対照的に配置された2枚の揺動板24のそれぞれの第1の歯23、23が回転板40Aの両側に形成した第2の歯41、41とそれぞれ噛み合う噛み合い点を、両面で合い対向する位置となるようにして、コンピュータ70でのシーケンス制御を行う。それにより、回転板40Aに作用する軸方向の力が相殺されることとなり、出力の増加と共に、振動の少ない運転が可能となる。
【0032】
図9は、本発明による回転型アクチュエータのさらに他の実施の形態を示す中央断面図である。この回転型アクチュエータ1Bは、図8に示した回転型アクチュエータ1Aと同様のものであるが、環状の回転板40Bが共通の円筒39Aに一体的に形成されると共に、軸心線を同じとして共通の固定軸10Bが配置され、該固定軸10Bに対して、環状の回転板40Bの両側に、上記したのとほぼ同じ構成のピストン・シリンダ機構30、揺動円盤24などの駆動機構が鏡面対称となるようにして配置されている。この回転型アクチュエータ1Bの作動態様は、図8に示す回転型アクチュエータ1Aと基本的に同じであるが、共通する一本の固定軸10Bを用いることにより、より安定した運転が期待できる。
また、いずれの場合も、出力(トルク)は流体の供給圧力で、回転数は電磁弁の切り替え速度で決まるので、トルクと回転数を独立して制御可能であり、多方面での他用途の使用が可能となる。
【0033】
【発明の効果】
上記のとおりであり、本発明によれば、小形でありながら低回転数、高出力の回転型アクチュエータが得られる。必要な場合には、大型高出力のものとして構築することもできる。
【図面の簡単な説明】
【図1】本発明による回転型アクチュエータの一実施の形態を示す斜視図。
【図2】図1の示す回転型アクチュエータの中央断面図。
【図3】回転板の一例を示す斜視図。
【図4】本発明による回転型アクチュエータの作動原理を説明するシステム図。
【図5】第1の歯と第2の歯との噛み合い態様を説明する図。
【図6】4組のピストン・シリンダ機構の異なった加圧パターンを説明する図。
【図7】本発明による回転型アクチュエータの一使用例を説明する断面図。
【図8】本発明による回転型アクチュエータの他の実施の形態を示す中央断面図。
【図9】本発明による回転型アクチュエータのさらに他の実施の形態を示す中央断面図。
【図10】液圧駆動アクチュエータの一例としてのワブルモータを説明する図。
【符号の説明】
1…回転型アクチュエータ、10…固定軸、20…自在継ぎ手、24…揺動円盤、23…第1の歯、30…揺動運動発生手段としてのピストン・シリンダ機構、37…ベアリング、39…円筒、40…回転円盤、41…第2の歯、52…電磁弁、60…圧空源、70…コンピュータ
Claims (3)
- 固定台に設けた固定軸に自在継ぎ手を介して揺動自在に支持され、かつ、該固定軸の軸心を中心として同心円状に形成された歯数Nの第1の歯を備えている2枚の揺動板と、軸方向の移動は阻止された状態で前記揺動板に対向して配置され、かつ、両側面に前記揺動円盤の第1の歯と噛み合うことのできる歯数Mの第2の歯(但し、M≠N)を前記固定軸の軸心を中心として同心円状に備えている回転板と、前記揺動板に対して、その第1の歯と前記回転板に形成した第2の歯との噛み合い位置が連続して変位するように360度に亘る周期的な揺動運動を生じさせる揺動運動発生手段とを備えてなり、
前記2枚の揺動板はそれぞれの第1の歯が向き合うように配置されているとともに、前記回転板は前記2枚の揺動板の間に配置されており、前記揺動運動発生手段は、前記2枚の揺動板の第1の歯と前記回転板の両側面に形成された第2の歯とが噛み合うそれぞれの噛み合い点が前記両側面で対向する位置となるように揺動運動を生じさせ、前記揺動板の360度に亘る1揺動周期により、第1の歯の歯数Nと第2の歯の歯数Mの差分の回転移動を前記回転板に生じさせることを特徴とする回転型アクチュエータ。 - 揺動運動発生手段は、固定台と揺動板の間に固定軸に対して回転対称に配置された3個以上の直動機構と、該直動機構を所定の順番に作動状態とするためのシーケンス制御される作動機構とを備えることを特徴とする請求項1記載の回転型アクチュエータ。
- 直動機構が流体駆動のピストン・シリンダ機構であることを特徴とする請求項2記載の回転型アクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP19028399A JP3966438B2 (ja) | 1999-07-05 | 1999-07-05 | 回転型アクチュエータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP19028399A JP3966438B2 (ja) | 1999-07-05 | 1999-07-05 | 回転型アクチュエータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001020908A JP2001020908A (ja) | 2001-01-23 |
| JP3966438B2 true JP3966438B2 (ja) | 2007-08-29 |
Family
ID=16255602
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP19028399A Expired - Fee Related JP3966438B2 (ja) | 1999-07-05 | 1999-07-05 | 回転型アクチュエータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3966438B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002317858A (ja) * | 2001-04-18 | 2002-10-31 | Tok Bearing Co Ltd | アクチュエータ |
| CN114198460B (zh) * | 2021-12-22 | 2023-05-16 | 姜虹 | 一种章动减速器 |
-
1999
- 1999-07-05 JP JP19028399A patent/JP3966438B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001020908A (ja) | 2001-01-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20020066331A1 (en) | Joint structure of robot | |
| JP2008157289A (ja) | ロータリアクチュエータ | |
| JP2001234999A (ja) | 軸力発生装置およびトラクション変速装置 | |
| JP3966438B2 (ja) | 回転型アクチュエータ | |
| CN114992288B (zh) | 一种柔性传动的行星减速机 | |
| JP4737695B2 (ja) | 指関節機構 | |
| JP2016187858A (ja) | ロボットアーム固定装置およびロボット | |
| JP2018189237A (ja) | サイクロ減速機 | |
| JPH0544794A (ja) | 揺動回転板を用いた減速装置 | |
| Uzuka et al. | Comparative assessment of several nutation motor types | |
| JP2573975Y2 (ja) | 特殊遊星歯車減速機 | |
| JP2002147545A (ja) | 油圧駆動減速装置 | |
| JPH03136710A (ja) | 電動回転工具 | |
| KR20030079938A (ko) | 회전 에너지 전달 방법 및 수단과, 연속적인 가변형 변속기 | |
| JP2000055146A (ja) | ハーモニックドライブ式変速機 | |
| JP2004092782A (ja) | バルブ駆動用の減速装置 | |
| JPH03288044A (ja) | 内接遊星歯車装置 | |
| JPH10193292A (ja) | ロータリバランサ及び該ロータリバランサを内蔵したロボット | |
| JP4249447B2 (ja) | バルブ駆動用の動力伝達装置 | |
| JPH0450464B2 (ja) | ||
| JPH0947927A (ja) | 回転アクチュエータ及びそれを使用したネジ締め機 | |
| JPS58165977A (ja) | 直線駆動形作動装置 | |
| JPH1078010A (ja) | アクチュエータ | |
| JPS6337498Y2 (ja) | ||
| JP2567651Y2 (ja) | アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051117 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070104 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070109 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070312 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070508 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070524 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100608 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100608 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |