JP4132448B2 - 産業車両の走行制御装置 - Google Patents
産業車両の走行制御装置 Download PDFInfo
- Publication number
- JP4132448B2 JP4132448B2 JP22301599A JP22301599A JP4132448B2 JP 4132448 B2 JP4132448 B2 JP 4132448B2 JP 22301599 A JP22301599 A JP 22301599A JP 22301599 A JP22301599 A JP 22301599A JP 4132448 B2 JP4132448 B2 JP 4132448B2
- Authority
- JP
- Japan
- Prior art keywords
- forklift
- speed
- industrial vehicle
- fork
- travel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000003028 elevating effect Effects 0.000 claims description 8
- 238000001514 detection method Methods 0.000 description 13
- 230000035939 shock Effects 0.000 description 7
- 230000001105 regulatory effect Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 230000000994 depressogenic effect Effects 0.000 description 3
- 230000002074 deregulated effect Effects 0.000 description 2
- 230000001174 ascending effect Effects 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000000881 depressing effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
Images





Landscapes
- Forklifts And Lifting Vehicles (AREA)
Description
【発明の属する技術分野】
本発明は、産業車両において荷役作業等に供せられる昇降部(フォークリフトのフォーク等)が所定揚高を超えた状態で産業車両の走行最高速度を規制する走行制御装置に関する。
【0002】
【従来の技術】
従来、フォークリフトのフォークが高い位置に揚高された状態でフォークリフトを走行させる場合、フォーク上の荷物が崩れたりフォークから荷物が落下する危険があるため、フォークリフトの高揚高状態での走行最高速度を規制する制御が行われる。
図5に示したフォークリフト51のマスト55には、運転室Rのフォーク操作レバー52の操作により、フォーク53が約1メートル上昇駆動されたときに作動する検出スイッチ54が取り付けられている。この検出スイッチ54は、図6に示すように走行制御回路56に接続されており、検出スイッチ54のオンオフ信号が走行制御回路56に入力されるようになっている。また、この走行制御回路56には、フォークリフト51のアクセルペダル57の踏み込み量を検知するアクセルストロークセンサ58やフォークリフト51の走行速度を検知する走行速度センサ59などが接続されている。走行制御回路56は、上記検出スイッチ54からオン信号が出力されたとき、アクセルストロークセンサ58や走行速度センサ59からの信号に基づいて走行駆動部60のエンジンあるいは走行モータ等を制御し、フォークリフト51の走行最高速度を所定制限速度に規制する速度制限制御をする。
【0003】
【発明が解決しようとする課題】
上記従来のフォークリフト51において、フォーク53が原点(最下位置)から約1メートル上昇駆動されたときに検出スイッチ54がオンされるため、走行制御回路56は検出スイッチ54からのオン信号に基づいて上記速度制限制御をするとともに、フォーク53が下降されて検出スイッチ54がオフされると、この速度制限制御を解除する。
尚、上記速度制限制御が行われていない状態でフォークリフト51が走行しているとき、フォークリフト51はオペレータによるアクセルペダル57の踏み込み操作に対応した速度で走行する。そのため、オペレータは、上記速度制限制御が行われていない状態ではアクセルペダル57を強く踏み込むことが少ない。この状態でフォーク53が上昇駆動されて上記検出スイッチ54がオンされ、上記速度制限制御が開始されても、この時点におけるフォークリフト51の減速度は比較的小さい。
一方、上記速度制限制御が行われている状態ではフォークリフト51の走行最高速度が制限され、フォークリフト51の走行速度が小さいため、オペレータはアクセルペダル57を強く踏み込む傾向がある。その状態でフォーク53が下降駆動され、検出スイッチ54がオフされたときに前記速度制限制御が解除されるため、フォークリフト51は急速に加速される。
【0004】
以上の説明から明らかなように、上記速度制限制御が開始された瞬間にフォークリフト51が減速するショックよりも、速度制限制御が解除された瞬間にフォークリフト51が加速するショックのほうが一般的に大きい。そのため、上記速度制限制御が解除された瞬間に、例えばフォーク53上の荷物が崩れるようなことを考慮し、前述のように検出スイッチ54は約1メートルの比較的低い揚高位置に取り付けられている。
【0005】
上記のように、上記従来のフォークリフト51では、比較的低揚高で速度制限制御が開始されたり、解除されるため、前記検出スイッチ54の位置より上の中間揚高及び高揚高でのフォークリフト51の走行最高速度は制限される。そのため、比較的作業頻度の高い中間揚高におけるフォークリフト51の作業効率が低いという問題がある。
【0006】
そこで本発明では、産業車両の昇降部が中間揚高に位置する場合の作業効率を向上させることが可能な産業車両の走行制御装置を提供することを解決すべき課題とするものである。
【0007】
【課題を解決するための手段】
上記課題は、特許請求の範囲に記載した産業車両の走行制御装置により解決することができる。
請求項1記載の産業車両の走行制御装置によれば、昇降部が第2の揚高に上昇駆動されるまで産業車両の走行最高速度は所定制限速度に規制されないため、産業車両はオペレータのアクセルペダルの踏み込み操作等に対応した速度で走行する。これにより、昇降部が作業頻度の高い第1の揚高と第2の揚高の間の中間揚高に位置している場合、産業車両の作業効率が良い。
尚、前記「発明が解決しようとする課題」の欄でフォークリフトの例を示したように、産業車両の走行最高速度が所定制限速度に規制されている場合、走行速度が遅いため、運転者はアクセルペダルを強く踏み込むことが多く、産業車両の走行最高速度が規制解除される瞬間でもアクセルペダルを強く踏み込みこんでいるため、産業車両の走行最高速度が規制解除された瞬間に産業車両は急激に加速され、それに伴うショックが極めて大きい。これにより、産業車両の走行最高速度が所定制限速度に規制開始される第2の揚高は高い位置に設定が可能である反面、産業車両の走行最高速度が規制解除される第1の揚高は、上記加速に伴うショックを考慮して低い位置に設定される。
【0008】
次に、請求項2記載の産業車両の走行制御装置によれば、請求項1記載の産業車両の走行制御装置の場合と同様に昇降部が作業頻度の高い第1の揚高と第2の揚高の間の中間揚高に位置している場合、産業車両の作業効率が良い。
また、昇降部が第2の揚高に上昇駆動された場合は産業車両の走行最高速度が徐々に小さくなるように制御されるため、昇降部が第2の揚高に達したときに産業車両の走行最高速度が所定制限速度に規制開始される際の走行減速ショックが小さい。
また、昇降部が第1の揚高に下降駆動された場合は産業車両の走行最高速度が徐々に大きくなるように制御されるため、昇降部が第1の揚高に下降されたときに産業車両の走行最高速度の規制が解除される際の走行加速ショックが小さい。
尚、本明細書中の「徐々に規制」とは、例えば直線的変化や、曲線的変化や、段階的変化の全てを含む意味で用いられる。
【0009】
【発明の実施の形態】
次に、本発明の実施の形態について説明する。
図1は、本発明の第1の実施の形態に対応したフォークリフト1の側面図である。
産業車両と呼称されるフォークリフト1に装備されたフォーク4は、運転室Rに装備されたフォーク操作レバー7の操作により油圧シリンダ5のピストンロッド6が伸縮駆動されるため、このピストンロッド6の伸縮駆動により昇降される。
また、フォークリフト1は、運転室Rに装備されたアクセルペダル2が図示していないオペレータにより踏み込み操作されたときのストローク量に対応した速度で走行される。
【0010】
フォークリフト1のマスト3に、二つのスイッチ9,10が取り付けられている。上位に取り付けられたスイッチ9、及び、下位に取り付けられたスイッチ10は、フォーク4が昇降される場合にフォーク4と一体的に昇降される図示していないストライカが当接したとき作動され、オン信号を出力する。
尚、スイッチ9の位置を超えてフォーク4が上昇駆動される領域を高揚高とし、スイッチ9とスイッチ10の間の領域を中間揚高とし、スイッチ10の位置以下の領域を低揚高とする。
【0011】
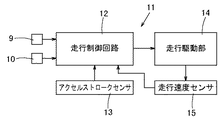
図2は、フォークリフト1の走行制御装置のブロック図である。
図2に示すように、フォークリフト1の走行制御装置11は、上記スイッチ9,10が電気的に接続される走行制御回路12と、前記アクセルペダル2のストローク量を検知したうえ、その検知信号を走行制御回路12に出力するアクセルストロークセンサ13と、走行制御回路12から出力される走行制御信号に基づいてフォークリフト1のエンジンや走行モータを走行駆動する走行駆動部14と、走行駆動部14を構成する車輪の回転数を検知したうえ、その検知信号を走行制御回路12に出力する走行速度センサ15とを備えている。
【0012】
次に、第1の実施の形態の作用について説明する。
フォーク4が上昇駆動され、図3に示した揚高h1、即ち前記スイッチ10の位置まで揚高されると、スイッチ10から走行制御回路12にオン信号が出力される。また、フォーク4が更に上昇駆動され、揚高h2、即ち前記スイッチ9の位置まで揚高されると、スイッチ9から走行制御回路12にオン信号が出力される。スイッチ9から走行制御回路12にオン信号が出力される前にフォークリフト1のオペレータが前記アクセルペダル2を大きく踏み込んでおり、図3に示すように走行最高速度が所定制限速度V0を超えてフォークリフト1が走行している場合、走行制御回路12はスイッチ9からのオン信号を入力したとき、フォークリフト1の走行最高速度を所定制限速度V0に規制する速度制限制御を開始する。
【0013】
フォーク4がスイッチ9の位置を超えて揚高されても走行制御回路12は上記速度制限制御を継続するため、フォークリフト1は走行最高速度が所定制限速度V0に規制された状態で走行する。これにより、フォーク4が高揚高の領域にあってもフォーク4上の荷物が崩れたり、フォーク4から荷物が落下するというようなことを防ぐことができる。
【0014】
図3に示すように、フォーク4が揚高h1、即ち前記スイッチ10の位置に下降されるまで上記速度制限制御が継続され、スイッチ10からオン信号が出力されると上記速度制限制御が解除される。
フォークリフト1の走行最高速度が所定制限速度V0に規制されている場合、フォークリフト1の走行速度が遅いため、オペレータはアクセルペダル2を強く踏み込んでいることが多い。そのため、フォークリフト1の走行最高速度が規制解除された瞬間にフォークリフト1は大きく加速され、ショックが極めて大きくなる。そこで、フォーク4上の荷物が崩れたり、フォーク4から荷物が落下することを防止するため、フォークリフト1の走行最高速度が規制解除される掲高h1を、例えば1メートルという低掲高に設定する。
【0015】
フォーク4が揚高h1まで下降されるとフォークリフト1の走行最高速度の規制が解除されるため、フォークリフト1はオペレータによるアクセルペダル2の踏み込み操作に対応した速度で走行する。
【0016】
以上の説明から明らかなように、フォーク4が揚高h2に上昇駆動されるまで、フォークリフト1の走行最高速度は規制されない。これにより、フォーク4が揚高h1と揚高h2の間の中間揚高に位置している場合、オペレータによるアクセルペダル2の踏み込み操作に対応した速度でフォークリフト1を走行させることができるため、フォークリフト1による作業効率が良い。
【0017】
次に、第2の実施の形態について説明する。
尚、第2の実施の形態では、図1に示した前記フォークリフト1における二つのスイッチ9,10を設けることなく、前記フォーク4の揚高を連続的に検知するセンサを用いる。このセンサとして、例えば、前記油圧シリンダ5のピストンロッド6の昇降位置を超音波を用いて検知する超音波式位置センサや、ピストンロッド6の上下方向の往復直線移動を回転に変換したうえ、その回転をロータリーエンコーダで検出する位置センサを用いる。
【0018】
図4に示すように、フォークリフト1の走行最高速度が所定制限速度V0を超えてフォークリフト1が走行している場合、前記フォーク4の揚高を連続的に検知するセンサによりフォーク4が揚高h2に上昇駆動されたことを検知されると、図示していない走行制御回路は、フォークリフト1の走行最高速度を直線的に小さく規制する制御を開始するとともに、フォーク4が揚高h2と揚高h3間を上昇駆動される過程で同制御を継続する。フォーク4が揚高h3に達すると、走行制御回路は、フォークリフト1の走行最高速度を所定制限速度V0に規制する速度制限制御を開始し、フォーク4が揚高h3を超えて上昇駆動されると、同制御を継続する。これにより、フォークリフト1の走行最高速度が所定制限速度V0を超えないため、フォーク4上の荷物が崩れたり、フォーク4から荷物が落下するというようなことを防ぐことができる。
【0019】
次に、フォーク4が高揚高領域から下降駆動される場合、フォーク4が揚高h1まで下降されると、走行制御回路はフォークリフト1の走行最高速度を図4に示すように直線的に大きくする制御を開始し、フォーク4が揚高h4に下降されるまで、その制御を継続する。そして、フォーク4が揚高h4に下降されると、走行制御回路はフォークリフト1の走行最高速度の規制を解除するため、フォークリフト1はオペレータによるアクセルペダル2の踏み込み操作に対応した速度で走行する。
【0020】
以上の説明から明らかなように、フォーク4が揚高h1を超えて揚高されても揚高h1と揚高h2の間の中間揚高領域に位置している場合、フォークリフト1の走行最高速度は所定制限速度V0に規制されない。これにより、フォーク4が揚高h1と揚高h2の間の中間揚高領域に位置している場合に、フォークリフト1はオペレータによるアクセルペダル2の踏み込み操作に対応した速度で走行するため、フォークリフト1による作業効率が良い。
【0021】
また、フォーク4の上昇駆動においてフォーク4が揚高h2に達したときにオペレータがアクセルペダル2を強く踏み込んでいる状態での前記速度制限制御の開始に伴う走行減速が円滑に行われる。また、フォーク4が揚高h1に下降されたときにオペレータがアクセルペダル2を強く踏み込んでいる加速可能状態での走行加速が円滑に行われる。
【0022】
以上の二つの実施の形態では、産業車両の例としてフォークリフトを説明したが、フォークリフトに限らず、例えばオーダーピッカーなども同様であり、その他にも昇降部を有する産業車両が範疇に入る。
【0023】
【発明の効果】
本発明によれば、産業車両の昇降部が中間揚高領域に位置する場合に産業車両の走行最高速度を規制しないため、産業車両はオペレータの走行操作に対応した速度で走行することが可能になり、作業効率を向上させることができるという効果がある。
【図面の簡単な説明】
【図1】フォークリフトの側面図である。
【図2】フォークリフトの走行制御装置のブロック図である。
【図3】第1の実施の形態の走行制御作用説明図である。
【図4】第2の実施の形態の走行制御作用説明図である。
【図5】従来のフォークリフトの側面図である。
【図6】従来の走行制御装置のブロック図である。
【符号の説明】
1 フォークリフト
4 フォーク
9 スイッチ
10 スイッチ
11 走行制御装置
14 走行駆動部
Claims (2)
- 産業車両の昇降部が、予め設定された第1の揚高を超え、且つ同第1の揚高より上位に設定された第2の揚高に上昇駆動された場合に、前記産業車両の走行最高速度を所定制限速度に規制する速度制限制御を開始し、前記昇降部が前記第2の揚高以上の揚高から前記第1の揚高に下降駆動された場合に前記速度制限制御を解除する走行制御手段を備えた産業車両の走行制御装置。
- 前記走行制御手段は、前記昇降部が前記第2の揚高に上昇駆動された場合には、前記産業車両の走行最高速度を徐々に規制し、前記昇降部が前記第1の揚高に下降駆動された場合には前記産業車両の走行最高速度を徐々に大きくする請求項1記載の産業車両の走行制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP22301599A JP4132448B2 (ja) | 1999-08-05 | 1999-08-05 | 産業車両の走行制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP22301599A JP4132448B2 (ja) | 1999-08-05 | 1999-08-05 | 産業車両の走行制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001048500A JP2001048500A (ja) | 2001-02-20 |
| JP4132448B2 true JP4132448B2 (ja) | 2008-08-13 |
Family
ID=16791504
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP22301599A Expired - Fee Related JP4132448B2 (ja) | 1999-08-05 | 1999-08-05 | 産業車両の走行制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4132448B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100797011B1 (ko) * | 2001-08-30 | 2008-01-22 | 두산인프라코어 주식회사 | 지게차의 포크 위치 검출 장치 및 이를 이용한 속도 제어방법 |
| JP4807028B2 (ja) * | 2005-09-30 | 2011-11-02 | 株式会社豊田自動織機 | フォークリフトの走行制御装置 |
| KR102106178B1 (ko) * | 2014-11-27 | 2020-04-29 | 주식회사 두산 | 지게차의 제어방법 |
| CN118723866B (zh) * | 2024-08-20 | 2025-11-18 | 安徽合力股份有限公司 | 一种用于站驾式堆垛车的安全保护系统及保护方法 |
| CN119528066B (zh) * | 2024-11-29 | 2025-10-24 | 宁波如意股份有限公司 | 一种物流工业车辆的控制方法 |
-
1999
- 1999-08-05 JP JP22301599A patent/JP4132448B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001048500A (ja) | 2001-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7735609B2 (en) | Controller of industrial vehicle, industrial vehicle, and control method for industrial vehicle | |
| JP4132448B2 (ja) | 産業車両の走行制御装置 | |
| CN1748085A (zh) | 移动式液压作业机 | |
| US20040154871A1 (en) | Method for operating a fork-lift truck | |
| EP1359113A3 (de) | Flurförderzeug mit einer Vorrichtung zum Bewegen eines Hubgerüsts | |
| CN103909984B (zh) | 一种驾驶室可升降的叉车 | |
| JP5262296B2 (ja) | 産業車両の走行制御装置 | |
| KR100301627B1 (ko) | 작업기의조작레버의조작반력제어장치 | |
| CN100381350C (zh) | 操纵叉式升降车的方法 | |
| JP2983922B2 (ja) | 穿孔装置 | |
| EP2008961B1 (en) | Control unit, method and computer program product for controlling a lift mechanism | |
| KR101112999B1 (ko) | 지게차의 속도 제어 회로 및 제어 방법 | |
| JP2007038918A (ja) | スタック脱出支援装置およびスタック脱出支援方法 | |
| CN118254733A (zh) | 用于车辆的踏板单元 | |
| JP2020011811A (ja) | 荷役車両の走行制御装置 | |
| JPH11228094A (ja) | フォークリフト車のフォーク昇降制御装置 | |
| JP7534062B2 (ja) | 走行制御装置、走行制御方法および走行制御プログラム | |
| CN202369350U (zh) | 高空作业车工作臂起升操作的自动加速控制系统 | |
| JP5567608B2 (ja) | 産業用車両 | |
| JP2006077451A (ja) | 作業車両の作業機用油圧ポンプの容量制御方法及び容量制御装置 | |
| JP2667598B2 (ja) | 乗用型水田作業機 | |
| JP2026057972A (ja) | 重さ変更システム | |
| JP2003054899A (ja) | フォークリフトの制御装置 | |
| JPH072498A (ja) | 荷役用油圧制御装置 | |
| JPH08245198A (ja) | オーダーピッキング車走行時のパレット抜け防止装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080509 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080513 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080602 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110606 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4132448 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110606 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110606 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130606 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140606 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |