JP4623765B2 - 3次元操作検出装置 - Google Patents
3次元操作検出装置 Download PDFInfo
- Publication number
- JP4623765B2 JP4623765B2 JP29117096A JP29117096A JP4623765B2 JP 4623765 B2 JP4623765 B2 JP 4623765B2 JP 29117096 A JP29117096 A JP 29117096A JP 29117096 A JP29117096 A JP 29117096A JP 4623765 B2 JP4623765 B2 JP 4623765B2
- Authority
- JP
- Japan
- Prior art keywords
- phase
- output
- coil
- axis
- detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images



















Landscapes
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Position Input By Displaying (AREA)
Description
【発明の属する技術分野】
本発明は、人手等による3次元的操作を検出する3次元操作検出装置に関し、ジョイ・スティックのような3次元入力装置として、ゲーム機、パソコン、マルチメディア機器など、様々な分野で応用可能なものである。
【0002】
【従来の技術】
ジョイ・スティックのような従来知られた3次元操作型入力装置においては、スティック型操作子をベースに対して3次元的に移動可能とし、ベースの側に該スティック型操作子の3次元的動きを検出するための検出要素を設けるようにしている。その検出要素としては、一般的には、単純なスイッチが使用されていた。例えば、プラスX軸方向に操作子を傾けると、対応するスイッチがオンし、そのオン時間だけクロックパルスが出力されて、操作量に対応する情報となる。
しかし、そのような操作時間対応情報出力型のものでは、操作量を大きくすると応答時間が遅くなるという問題がある。そこで、最近では、X,Y,Zの各軸に関してポテンショメータのような位置検出装置を使用し、実際の操作移動量を検出するようにしたものがある。しかし、ポテンショメータでは、摺動接触子があるために耐久性の点で難があった。
【0003】
一方、一般的に知られた誘導型位置検出装置には、直線位置検出装置としては差動トランスがあり、回転位置検出装置としてはレゾルバがある。差動トランスは、1つの1次巻線を1相で励磁し、差動接続された2つの2次巻線の各配置位置において検出対象位置に連動する鉄心コアの直線位置に応じて差動的に変化するリラクタンスを生ぜしめ、その結果として得られる1相の誘導出力交流信号の電圧振幅レベルが鉄心コアの直線位置を示すようにしたものである。レゾルバは、複数の1次巻線を1相で励磁し、サイン相取り出し用の2次巻線からサイン相の振幅関数特性を示す出力交流信号を取り出し、コサイン相取り出し用の2次巻線からコサイン相の振幅関数特性を示す出力交流信号を取り出すようにしたものである。この2相のレゾルバ出力は公知のR/Dコンバータといわれる変換回路を用いて処理し、検出した回転位置に対応する位相値をディジタル的に測定することができる。
また、サイン相とコサイン相のような複数相の交流信号によって複数の1次巻線を夫々励磁し、検出対象直線位置又は回転位置に応じて該交流信号を電気的に位相シフトした出力交流信号を出力し、この出力交流信号の電気的位相シフト量を測定することにより、検出対象直線位置又は回転位置をディジタル的に測定する技術も知られている(例えば、特開昭49−107758号、特開昭53−106065号、特開昭55−13891号、実公平1−25286号など)。
【0004】
【発明が解決しようとする課題】
上述した誘導型の検出装置は、構造的に非接触であるため、ジョイ・スティックのような3次元操作型入力装置に応用することができれば好ましい。しかし、1本のスティックをベースに対して3次元的に動かすことができるようにし、かつこのスティックの動きを電磁誘導方式によってX,Y,Zの3軸について検出できるようにする構造は複雑であり、未だ、その種の装置は考えられていなかった。
また、スティックをベースに固定せずに、自由に持ち歩きながら、入力操作できるような3次元操作型入力装置も従来は存在していなかった。
本発明は上述の点に鑑みてなされたもので、従来なかった新規かつ有用な誘導型の3次元操作検出装置を提供しようとするものである。また、自由に持ち歩きながら、操作できるような、画期的な3次元操作検出装置を提供しようとするものである。
【0005】
【課題を解決するための手段】
【0008】
本発明に従う3次元操作検出装置は、人の手で持つことが可能な本体部と、前記本体部に形成された収納空間内にて相対的に上下に直線変位可能に配され、前記本体部を上下に動かす操作に応答して該収納空間を直線変位する可動部材と、前記本体部に搭載され、前記可動部材の前記本体部に対する相対的な直線変位を検出する直線位置検出手段と、前記本体部に搭載され、前記可動部材の直線移動軸に直交するX−Y座標面上のX軸及びY軸方向の該本体部の傾きを検出する2次元傾斜検出手段とを具えたものである。
本発明に従う3次元操作検出装置によれば、本体部は人の手で持つことが可能な構成であり、本体部に搭載された2次元傾斜検出手段によって該本体部そのものの2次元傾斜を検出するようになっており、かつ、本体部を上下に動かす操作に応答して収納空間内で可動部材が直線変位し、この可動部材の本体部に対する相対的な直線変位が直線位置検出手段によって検出される構成であるため、人の手で持った本体部を2次元的に傾斜させることでX軸及びY軸に沿う2次元的操作入力が行え、また、該本体部をZ軸方向に(上下に)振る動作によってZ軸に沿う操作入力が行え、総合して3次元的操作が行えるものであり、かつ、その3次元的操作に応じた検出信号を生成することができる。すなわち、本体部をZ軸方向に(上下に)振る動作によって収納空間内で可動部材が変位し、Z軸方向の動きに応じた検出信号を生成することができる。
また、3次元のすべての軸の検出手段が本体部に搭載されることになり、該本体部を固定せずにフリーな状態で持ち歩きながら3次元操作入力を行うことができる。また、本体部をZ軸方向に(上下に)振る動作によってZ軸方向操作入力を行う構成であるため、構造が簡単である(すなわち、操作子を本体部に対して上下動可能かつ全方向にユニバーサルに操作可能な構成とする必要がない)。
一例として、前記可動部材は、前記収納空間内にて重力に従って移動自在に収納された磁気応答部材からなり、前記直線位置検出手段は、前記収納空間の周囲に設けられたコイル部からなり、前記本体部の上下方向の動きに応じて前記コイル部に対して前記磁気応答部材が変位し、該動きに応じた検出信号を該コイル部から出力することを特徴とする。
【0010】
本発明の一実施形態によれば、前記直線位置検出手段は、コイル部と、該コイル部に対して相対的に変位可能な磁気応答部材とを含み、前記直動操作子の操作に応じて該コイル部と磁気応答部材の一方を他方に対して相対的に直線変位させることで、前記直動操作子の操作に応じた検出信号を該コイル部から出力するものである。
本発明の一実施形態によれば、前記2次元傾斜検出手段は、コイル部と、前記本体部のX軸及びY軸方向の動きに応じて該コイル部に対して相対的に変位する磁気応答部材とを含み、該本体部のX軸及びY軸方向の動きに応じた検出信号を該コイル部から出力するものである。
本発明の一実施形態によれば、前記2次元傾斜検出手段の前記磁気応答部材は、所定の収納空間内に移動自在に収納され、前記本体部のX軸及びY軸方向の動きに応じて該収納空間内を動くことにより前記コイル部に対して相対的に変位するものである。
本発明の一実施形態によれば、前記2次元傾斜検出手段は、リング状の収納空間を有する収納体と、前記収納空間内にて重力に従って移動自在に収納された流動性の磁気応答部材と、前記収納体において前記収納空間に対応して配置されたコイル部とを具え、前記X軸及びY軸方向の傾きに応じて前記磁気応答部材が前記リング状の収納空間を移動し、該収納空間における前記磁気応答部材の分布に応答する出力信号を前記コイル部から生成し、これにより前記X軸及びY軸方向の傾きを検出するものである。このように、リング状の収納空間を有する収納体の収納空間内に流動性の磁気応答部材を収納した構成を採用し、X軸及びY軸方向の傾きを一挙に検出し、これに基づきにX軸及びY軸方向の操作検出信号を出力するようにしたことにより、X軸及びY軸方向の操作を検出するための新規な構成が提供でき、かつその構成をコンパクトにすることができる。
【0011】
本発明の一実施形態によれば、前記2次元傾斜検出手段は、コイル部と、所定の収納空間内に移動自在に収納され、前記本体部のX軸及びY軸方向の少なくとも一方の動きに応じて該収納空間内を動くことにより該コイル部に対して相対的に変位する磁気応答部材とを含む検出装置を少なくとも1つ有し、該検出装置によって前記操作部のX軸及びY軸方向の傾きを検出することに基づきX軸及びY軸方向の操作検出信号を出力する。このように、所定の収納空間内に移動自在に収納され、操作部のX軸及びY軸方向の少なくとも一方の動きに応じて該収納空間内を動くことにより該コイル部に対して相対的に変位する磁気応答部材とを含む検出装置を少なくとも1つ有している構成であることを特徴としている。このような特殊な構成により、X軸及びY軸方向の動きに応じた傾きを検出することができ、これに基づきX軸及びY軸方向の操作検出信号を出力することができる。これにより、X軸及びY軸方向の操作を検出するための新規な構成が提供できる。
【0012】
本発明の一実施形態によれば、前記2次元傾斜検出手段は、 コイル部と、前記本体部のX軸及びY軸方向の一方の動きに応じて該コイル部に対して相対的に変位する磁気応答部材とを含む検出装置をX軸及びY軸に対応して夫々設け、該検出装置によって前記操作部のX軸及びY軸方向の傾きを夫々検出することに基づきX軸及びY軸方向の操作検出信号を出力する。これにより、X軸及びY軸方向の操作を検出するための新規な構成が提供できる。
【0013】
本発明によれば、更に様々な実施の形態をとることができ、その詳細は、例示的に以下において示される。
【0014】
【発明の実施の形態】
以下、添付図面を参照してこの発明の実施の形態を詳細に説明しよう。
図1(a)は、本発明の第1の観点に従う3次元操作検出装置の一実施例を示す外観略図、(b)はそのX軸及びZ軸に沿う断面略図である。この3次元操作検出装置は、例えば、ジョイ・スティックのような3次元操作型入力装置として応用可能なものであり、全体が1つの操作子からなるスティック部10は、略々円盤状の頂部10aとその下に延びた棒状部10bとからなっていて、図で破線で示すように、人の手に握って操作されるものである。スティック部10の下端10cは、図示のように単純に終端していて、このスティック部10を自由に持ち歩いたり、振り回したりできるようになっていてよい。勿論、これに限らず、従来のジョイ・スティックのように、該下端10cがX,Y軸方向にユニバーサルに自由に傾動できるように適宜手段で枢支されていてもよい。なお、スティック部10の棒状部10bが延びた方向をZ軸とし、それに直交する頂部10aの円盤面をX−Y座標面とし、該面上に適宜設定した直交座標軸をそれぞれX軸及びY軸とする。
【0015】
スティック部10において、頂部10aの部分には、前記X−Y座標面のX軸及びY軸方向についての傾きを検出するための傾斜センサ(第1の検出手段)100が搭載されている。スティック部10のX軸方向及びY軸方向の操作は、該スティック部10をX軸方向及びY軸方向に任意に傾かせることによって行うものとしている。従って、この傾斜センサ100によってスティック部10のX軸方向及びY軸方向の傾きを検出することにより、これに基づきX軸方向及びY軸方向の操作(動き)を検出する。
傾斜センサ100は、主に、コイル部2と、スティック部10のX軸及びY軸方向の動きに応じて該コイル部2に対して相対的に変位する磁気応答部材3とを含んでいる。追って詳しく示すように、スティック部10のX軸及びY軸方向の傾きに応じて磁気応答部材3が動き、これによってコイル部2と磁気応答部材3の相対的な位置関係が変化するようになっており、この変化に応じてコイル部2と磁気応答部材3の磁気結合が変化し、該スティック部10のX軸及びY軸方向の傾きに応じた誘導出力信号がコイル部2から出力される。
【0016】
スティック部10の頂部10aの略中央及び棒状部10bの部分には、Z軸方向の操作を検出するためのリニアセンサ(第2の検出手段)200が搭載されている。すなわち、頂部10aの上部には、Z軸方向に指で押圧操作するためのドーム状のプッシャ201が設けられており、棒状部10bの内部には図1(b)に示すように棒状の可動部204が挿入されており、このプッシャ201が可動部202に結合していて、該プッシャ201の押圧操作に応じて可動部204がZ軸方向(上下方向)に動くようになっている。可動部204の全体もしくは少なくとも先端寄りの所定範囲においては、所定の磁気応答部材(例えば磁性体)203が設けられており、プッシャ201の押圧操作に応じた可動部204の動きに伴って該磁気応答部材203が直線的に変位する。棒状部10bの内部における所定位置にコイル部202が固定されている。このリニアセンサ200において、コイル部202は1又は複数のコイルからなり、例えばそのコイル空間内に可動部204の該磁気応答部材203が侵入して、該可動部204の動きに応じて該コイル部202と磁気応答部材203の相対的なリニア位置が変化するようになっている。この変化に応じてコイル部202と磁気応答部材203の磁気結合が変化し、該リニア位置つまりZ軸方向の操作位置に対応する誘導出力信号がコイル部202から出力される。なお、プッシャ201が弾性ゴムからなっていて、その弾性作用によって押圧操作が加わらないときは中立位置(リニア変位0の位置)に復帰するようになっている。勿論、その他の中立位置復帰バネを設けてもよい。
【0017】
以上の構成により、操作者がスティック部10を握ってX軸及びY軸方向に任意に傾けることにより、その傾きに応じた誘導出力信号が傾斜センサ100のコイル部2から出力され、これに基づきX軸及びY軸方向の操作検出信号を得ることができる。また、操作者がスティック部10の上部のプッシャ201を押圧操作することにより、Z軸方向の操作に応じた誘導出力信号がリニアセンサ200のコイル部204から出力され、これに基づきZ軸方向の操作検出信号を得ることができる。
【0018】
次に、図2を参照して、傾斜センサ100の具体例を説明する。
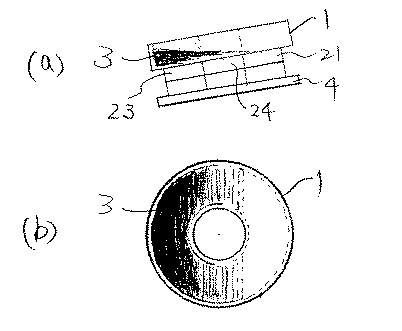
図2に示す傾斜センサ100は、1つのセンサによってX−Y座標平面の全方向についての傾斜検出が可能な多方向傾斜検出装置である。この傾斜センサ100は、収納体1内に流動性の磁気応答部材3を収納している。図2(a)は全体の側面略図、(b)は収納体1の概略斜視図、(c)は収納体1の断面図、(d)はコイル部2におけるコイル配置例を略示する平面図、である。
図2(b),(c)に示されるように、収納体1は、リング状の収納空間1aを有しており、このリング状の収納空間1a内に適量の流動性の磁気応答部材3が収納されている。磁気応答部材3としては、例えば磁性流体あるいは磁性粉体を使用する。磁性粉体としては、微粒粉に限らず、砂鉄のようなものであってもよい。図2(c)は、水平に置かれている状態の収納体1の断面略図であり、その場合、流動性の磁気応答部材3はリング状の収納空間1a内に均等に分布している。勿論、収納体1は、非磁性体からなる。4は、取付けベースである。
【0019】
図2(a)に示されるように、収納体1の下側にコイル部2が設けられる。コイル部2は、収納空間1a内における磁気応答部材3の分布を検出し得るような適宜のコイル配置からなる。例えば、図2(d)の例では、リング状の収納空間1aの円周方向に沿って等間隔(90度間隔)で4つの極を構成するようにコイル21〜24が設けられている。例えば、コイル21〜24は2次コイルであって、この各2次コイル21〜24に対応して各極ごとに1次コイル11〜14を設けてもよい。
1次コイル11〜14を適宜の交流信号で励磁すると、夫々に対応する2次コイル21〜24からは夫々の誘導結合度若しくは磁気結合度に応じたレベルの交流信号が誘導される。この誘導結合若しくは磁気結合は、磁気応答部材3の存在によって可変制御される。
上記構成からなる傾斜センサ100が、検出対象における適宜の位置に取り付けられる。検出対象の面としての傾きを全方向について検出しうるようにするためには、収納空間1aのリングが検出対象面に平行となるように設置する。すなわち、円形リングの径方向が検出対象面に平行となるように設置する。なお、ここで、検出対象面とは実際に面を成している必要はなく、仮想的な面であってよい。すなわち、この傾斜センサ100は、検出対象面の四方・八方、全方向についての傾斜を検出することができる。
【0020】
収納体1が水平に置かれている場合(つまり、検出対象面が傾斜0のとき)は、流動性の磁気応答部材3はリング状の収納空間1a内に均等に分布しているので、どの2次コイル21〜24からも同じレベルの出力信号が得られる。従って、どの2次コイル21〜24からも同じレベルの出力信号が得られることに基づき、傾斜0であることが検出できる。
収納体1が任意の方向に傾斜すると(つまり、検出対象面が任意の方向に傾斜すると)、流動性の磁気応答部材3が重力に従って収納空間1a内を動き、該収納空間1a内における磁気応答部材3の分布に偏りが生じる。例えば、図3は、収納体1が傾斜した状態の一例を示す略図であり、(a)は側面図、(b)は平面図である。この場合、コイル23の方向に傾いており、2次コイル23の位置に対応して最も多量の磁気応答部材3が集まっている。2次コイル22,24の位置に対応している磁気応答部材3の量は僅かであり、2次コイル21の位置に対応している磁気応答部材3の量は0である。このように、収納空間1a内における磁気応答部材3の分布に応答する出力信号をコイル部2から得ることができ、これに基づき、傾斜の方向を検出することができ、また傾斜の大きさ(傾斜角)を検出することができる。
【0021】
収納空間1a内における磁気応答部材3の分布を検出するための採用するコイル部2の構成は、なんらかの形で磁気応答部材3の分布を検出することができるものでありさえすれば、どのような構成でもよい。
例えば、図2(d)に示すような円周状のコイル(極)配置の中心Oを原点0とするX,Y座標を想定し、このX,Y座標によって傾斜の方向を全方向的に表わすことができる。例えば、コイル21と23がX軸に対応しており、コイル22と24がY軸に対応しているとすると、コイル21はプラスX方向、コイル22はプラスY方向、コイル23はマイナスX方向、コイル24はマイナスY方向、に位置していることになる。そこで、2次コイル21が配置された極をプラスX極(図でx)、2次コイル22が配置された極をプラスY極(図でy)、2次コイル23が配置された極をマイナスX極(図で/x)、2次コイル24が配置された極をマイナスY極(図で/y)、と表わすことにする。
なお、明細書中では、表記の都合上、反転を示すバー記号は「/(スラッシュ)」で記載するが、これは、図中のバー記号に対応している。
【0022】
同じ軸のプラス極とマイナス極のコイル出力信号はその差を求めることにより、該軸についての座標値を求めることができる。例えば、2次コイル22と24の出力振幅レベルが同じである場合は、Y軸座標値は0であり、Y軸方向の傾斜成分が0であることを示す。
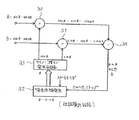
従って、コイル部2における各コイルに関連する回路例を示すと、図4のようになる。すなわち、すべての1次コイル11〜14を共通の交流信号(例えばsinωtと略記する)で励磁し、X軸に沿う各2次コイル21,23の出力信号の差を差分回路25で求め(差動接続でもよい)、その差信号としてX軸座標検出信号Sxを得るようにする。また、Y軸に沿う2次コイル22,24の出力信号の差を差分回路26で求め(差動接続でもよい)、その差信号としてY軸座標検出信号Syを得るようにする。このようにして求めたX,Y座標値の信号Sx,Syから座標の象限と極座標が判明するので、これらの信号Sx,Syを判定処理回路27で適宜処理することにより、傾斜の方向と大きさ(傾斜角)を検出することができる。なお、差分回路25,26の入力側又は出力側のどちらかに整流回路を設け、X,Y座標値を示す出力信号Sx,Syは、直流的な電圧レベル値とする。この電圧レベル値は、アナログ値のままである必要はなく、適宜ディジタル変換してもよい。従って、判定処理回路27はアナログ演算回路であってもよいし、あるいはディジタル回路であってもよい。
【0023】
概ね、極座標の偏角θが傾斜の方向に対応し、動径ρが傾斜の大きさ(傾斜角)に対応するので、判定処理回路27では、例えば下記式のような公知の直交座標−極座標変換公式を用いて、X,Y座標値の信号Sx,Syから極座標の偏角θと動径ρを求め、これに基づき傾斜の方向と大きさ(傾斜角)を検出するデータを得るようにすることができる。下記式において、x,yは、信号Sx,Syが示すX,Y座標値である。
【数1】
なお、厳密な極座標変換公式に限らず、おおまかな傾斜方向の判定は信号Sx,Syから座標の象限等を判定する簡単なテーブルを用いることによっても行える。また、おおまかな傾斜の大きさ(傾斜角)は、差信号(Sx,Sy)を使用せずに、個別の各コイル21〜24の出力レベルに基づき判定するようにしてもよい。例えば、各コイル21〜24の出力信号レベルのうち最大レベルのコイルの出力電圧値に基づき傾斜角度を判定する。その場合、傾斜方向判定結果を考慮して適宜の修正演算を行なうとよい。
その他、コイル部2の出力信号に基づく具体的な傾斜方向と傾斜量の判定の仕方は、設計上適宜の構成を採用してよい。
【0025】
別の例として、コイル部2を回転型のレゾルバと見立てて、90度間隔で配置された4つの2次コイル21〜24の極(X,Y,/X,/Y)を、サイン相、コサイン相、マイナス・サイン相、マイナス・コサイン相として、サイン及びコサインの2相のレゾルバ出力信号と同様の出力信号を取り出し、該出力信号から位相角データを求めることにより、該位相角データを極座標の偏角θに対応するデータとして得ることができる。
レゾルバ原理を採用する場合、コイル部2の各極(X,Y,/X,/Y)に対応する2次コイル21〜24に生じる誘導出力交流信号の振幅関数が、サイン関数、コサイン関数、マイナス・サイン関数、マイナス・コサイン関数にそれぞれ相当するものとなるように、各2次コイル21〜24の配置及び磁気応答部材3の磁気的性質及び量を、設定する。種々の条件によって、各コイルの配置は微妙に変わり得るし、磁気応答部材3の磁気的性質及び量も変わりうるので、希望の関数特性が得られるように各コイル配置を適宜調整したり、あるいは2次出力レベルを電気的増幅によって調整することにより、希望の振幅関数特性が最終的に得られるようにすることができる。従って、各2次コイル21〜24の配置と磁気応答部材3及び量は重要ではあるが、絶対的精度を要求されるわけではなく、設計上適宜に設定若しくは変更できる。
【0026】
レゾルバ原理を採用する場合、図5に示すように、コイル部2の1次及び2次コイルを回路を構成する。X軸(サイン相)の2次コイル21,23を差動接続し、Y軸(コサイン相)の2次コイル22,24を差動接続して、2つの出力信号を取り出すので、基本的なコイル結線は図4と変わらないが、整流回路は設けない。各2次コイル21〜24の誘導出力信号は、傾斜方向を示す偏角θに対応して2相の関数特性sinθ,cosθ及びその逆相の関数特性−sinθ,−cosθで振幅変調された状態で夫々出力されるようにすることができる。説明の便宜上、コイルの巻数等、その他の条件に従う係数は省略し、2次コイル21(サイン相)の出力信号を「sinθ・sinωt」で示し、2次コイル22(コサイン相)の出力信号を「cosθ・sinωt」で示す。また、2次コイル23(マイナス・サイン相)の出力信号を「−sinθ・sinωt」で示し、2次コイル24(マイナス・コサイン相)の出力信号を「−cosθ・sinωt」で示す。サイン相とマイナス・サイン相の誘導出力を差動的に合成することによりサイン関数の振幅関数を持つ第1の出力交流信号A(=2sinθ・sinωt)が得られる。また、コサイン相とマイナス・コサイン相の誘導出力を差動的に合成することによりコサイン関数の振幅関数を持つ第2の出力交流信号B(=2cosθ・sinωt)が得られる。なお、表現の簡略化のために、係数「2」を省略して、以下では、第1の出力交流信号Aを「sinθ・sinωt」で表わし、第2の出力交流信号Bを「cosθ・sinωt」で表わす。
【0027】
こうして、偏角θに対応する第1の関数値sinθを振幅値として持つ第1の出力交流信号A=sinθ・sinωtと、同じ偏角θに対応する第2の関数値cosθを振幅値として持つ第2の出力交流信号B=cosθ・sinωtとが出力される。このようなコイル構成によれば、回転型位置検出装置として従来知られたレゾルバにおいて得られるのと同様の、同相交流であって2相の振幅関数を持つ2つの出力交流信号A,B(サイン出力とコサイン出力)をコイル部2から得ることができるようにすることが理解できる。
このコイル部2から出力される2相の出力交流信号(A=sinθ・sinωtとB=cosθ・sinωt)は、従来知られたレゾルバの出力と同様の使い方をすることができる。例えば、図5に示すように、コイル部2の出力交流信号A,Bを適切なディジタル位相検出回路40に入力し、前記サイン関数sinθとコサイン関数cosθの位相値θをディジタル位相検出方式によって検出し、偏角θのディジタルデータDθを得るようにすることができる。こうして、レゾルバ原理に従う位相角検出処理によって、極座標の偏角θを示すディジタルデータDθを得ることができ、これによって検出対象の傾斜方向を検出することができる。
【0028】
この場合、傾斜の大きさ(傾斜角)は、前記数1に示す極座標公式の応用・変形によって、適宜求めることができる。例えば、図5の判定処理回路28において、各2次コイル21〜24の出力信号を整流した信号を入力し、この入力信号から最大レベルのものを検出し、ここから極座標の象限を判定してこの最大レベル値を直交座標のx値又はy値とし、かつ、前記ディジタルデータDθにもとづいて得た偏角θを利用して、極座標公式から動径ρを求めれば、傾斜の大きさ(傾斜角)を検出することができる。
なお、ディジタル位相検出回路40で採用するディジタル位相検出方式としては、公知のR−D(レゾルバ−ディジタル)コンバータを適用してもよいし、本発明者らによって開発済の新方式を採用してもよい。
なお、収納体1の収納空間は、リング状に限らず、凸曲面又は凹曲面状のような曲面状であってもよい。すなわち、収納体1の収納空間は、傾斜に応答してその内部の流動性の磁気応答部材3が重力に従って適切に変位しうるような形状であればよい。
【0029】
各実施例において、1次コイルは、各2次コイル21〜24に1対1で対応して設ける必要はなく、2次コイル21〜24の全体をカバーしうるように1個のみ又は適宜数だけ設けるようにしてよい。図7は、その一例を示すもので、2次コイル21〜24の配置の外側を囲んで1つの1次コイル15を設けたものである。このように1個の1次コイル15を設ける場合、2次コイル21〜24の配置の内側に設けてもよい。
また、コイル部2におけるコイル数及びその配置は上記実施例に示すものに限らず、様々な設計変更が可能である。例えば、上記実施例のような4極からなるコイル構成に限らず、6極あるいは8極あるいは12極等、任意である。
【0030】
次に、図6を参照してリニアセンサ200の一具体例につき説明する。
図6は、図示の都合上、Z軸(上下方向)を横向きにして描いてある。このリニアセンサ200は、前述の通り、プッシャ201に連動する可動部204と、この可動部204に設けられた磁気応答部材203と、所定位置に配置されたコイル部202とを含む。可動部204が検出対象たるプッシャ201に連結されて、該プッシャ201の直線位置の変化に連動して直線的にかつ往復的に変位可能であり、これに対して、コイル部202の配置は適宜に固定される。かくして、可動部204が検出対象たる直線位置に連動してコイル部202に対して相対的に直線的に変位する。勿論、その逆に、コイル部202をリニア変位検出対象たるプッシャ201に連動して変位させ、可動部204を固定するようにしてもよい。要するに、このリニアセンサ200においては、コイル部202に対する可動部204の相対的に直線位置を検出する。この相対的な直線変位の方向は、図において符号Zを伴う矢印で示されている。
【0031】
コイル部202は、1相の交流信号によって励磁される1次コイルPW1〜PW5と、直線変位方向Zに関して異なる位置に配置された複数の2次コイルSW1〜SW4とを含む。これらの1次及び2次コイル構成を明示するために、図6ではコイル部202は断面を含んで示されているが、実際は、点線で補って示されているように、ロッド状の可動部204の周囲にて適宜のギャップを空けて、コイルコイルが巻回された状態を成している。1相の交流信号によって共通に励磁されるが故に、1次コイルPW1〜PW5の数は、1又は適宜の複数であってよく、その配置も適宜であってよい。しかし、複数の1次コイルPW1〜PW5を適宜に分離して、例えば図6に示されるように各2次コイルSW1〜SW4をそれぞれの間に挟むように、配置することは、1次コイルによって発生する磁界を個別の2次コイルSW1〜SW4に対して有効に及ぼし、かつ可動部204の磁気応答部材203による磁場への影響を有効に及ぼすことができるので、好ましい。
【0032】
ロッド状の可動部204は、その所定範囲において、所定の磁気応答特性を持つ磁気応答部材203を直線変位方向に沿って所定のピッチpで1又は複数繰り返して設けて成るものである。既に知られているように、磁気応答部材203の材質を鉄またはニッケルなどのような磁性体、あるいは銅またはアルミニウムなどのような非磁性の導電体とすることにより、透磁率あるいは磁気抵抗あるいは渦電流損失などの所定の磁気応答特性を持たせることができるので、そのように適宜の材質を用いて磁気応答部材203を構成してよい。可動部204の基部ロッドの材質も、磁性体又は非磁性体又は導電体など適宜の材質を用いてよく、どのような材質を用いるかは、磁気応答部材203の材質及び/又は形状等との兼ね合いによって定まる。要するに、磁気応答部材203が存在する箇所とそうでない箇所との間では、コイル部202に及ぼす磁気的応答特性が異なるようになっていればよいものである。また、可動部204の基部ロッドに対する磁気応答部材203の形成法も、貼り付け、接着、かしめ止め、切削、めっき、蒸着、焼き付け、など適宜の手法を用いてよい。
【0033】
検出対象たる直線位置の変化に応じて、可動部204の磁気応答部材203のコイル部202に対する対応位置が変化することにより、1次コイルPW1〜PW5と各2次コイルSW1〜SW4間の磁気結合が該検出対象直線位置に応じて変化され、これにより、該検出対象直線位置に応じて振幅変調された誘導出力交流信号が、各2次コイルSW1〜SW4の配置のずれに応じて異なる振幅関数特性で、各2次コイルSW1〜SW4に誘起される。各2次コイルSW1〜SW4に誘起される各誘導出力交流信号は、1次コイルPW1〜PW5が1相の交流信号によって共通に励磁されるが故に、その電気的位相が同相であり、その振幅関数が磁気応答部材203の繰り返しピッチの1ピッチpに相当する変位量を1サイクルとして周期的にそれぞれ変化する。
【0034】
4つの2次コイルSW1〜SW4は、磁気応答部材203の繰り返しピッチの1ピッチpの範囲内において所定の間隔で配置され、各2次コイルSW1〜SW4に生じる誘導出力交流信号の振幅関数が、所望の特性を示すように設定される。例えば、レゾルバタイプの位置検出装置として構成する場合は、各2次コイルSW1〜SW4に生じる誘導出力交流信号の振幅関数が、サイン関数、コサイン関数、マイナス・サイン関数、マイナス・コサイン関数、にそれぞれ相当するように設定する。例えば図6に示されるように、1ピッチpの範囲を4分割し、p/4づつずれた各分割位置に配列する。これにより、各2次コイルSW1〜SW4に生じる誘導出力交流信号の振幅関数が、サイン関数、コサイン関数、マイナス・サイン関数、マイナス・コサイン関数、にそれぞれ相当するように設定することができる。勿論、種々の条件によって、各コイルの配置は微妙に変わり得るので、希望の関数特性が得られるように各コイル配置を適宜調整したり、あるいは2次出力レベルを電気的増幅によって調整して、希望の振幅関数特性が最終的に得られるようにする。
【0035】
例えば、2次コイルSW1の出力がサイン関数(図でsを付記する)に対応するとすると、これに対してp/2だけずれて配置された2次コイルSW3の出力はマイナス・サイン関数(図で/s(sバー)を付記する)に対応し、この両者の出力を差動的に合成することによりサイン関数の振幅関数を持つ第1の出力交流信号が得られる。また、サイン関数出力に対応する2次コイルSW1からp/4ずれて配置された2次コイルSW2の出力はコサイン関数(図でcを付記する)に対応し、これに対してp/2だけずれて配置された2次コイルSW4の出力はマイナス・コサイン関数(図で/c(cバー)を付記する)に対応し、この両者の出力を差動的に合成することによりコサイン関数の振幅関数を持つ第2の出力交流信号が得られる。。なお、明細書中では、表記の都合上、反転を示すバー記号は「/(スラッシュ)」で記載するが、これは、図中のバー記号に対応している。
【0036】
図7はコイル部202の回路図であり、1次コイルPW1〜PW5には共通の励磁交流信号(説明の便宜上、sinωtで示す)が印加される。この1次コイルPW1〜PW5の励磁に応じて、可動部204の磁気応答部材203のコイル部202に対する対応位置に応じた振幅値を持つ交流信号が各2次コイルSW1〜SW4に誘導される。夫々の誘導電圧レベルは検出対象直線位置xに対応して2相の関数特性sinθ,cosθ及びその逆相の関数特性−sinθ,−cosθを示す。すなわち、各2次コイルSW1〜SW4の誘導出力信号は、Z軸方向の検出対象直線位置すなわち可動部204のZ軸方向操作量(これを便宜的に“x”とする)に対応して2相の関数特性sinθ,cosθ及びその逆相の関数特性−sinθ,−cosθで振幅変調された状態で夫々出力される。なお、この場合、θはxに比例しており、例えば、θ=2π(x/p)のような関係である。説明の便宜上、コイルの巻数等、その他の条件に従う係数は省略し、2次コイルSW1をサイン相として、その出力信号を「sinθ・sinωt」で示し、2次コイルSW2をコサイン相として、その出力信号を「cosθ・sinωt」で示す。また、2次コイルSW3をマイナス・サイン相として、その出力信号を「−sinθ・sinωt」で示し、2次コイルSW4をマイナス・コサイン相として、その出力信号を「−cosθ・sinωt」で示す。サイン相とマイナス・サイン相の誘導出力を差動的に合成することによりサイン関数の振幅関数を持つ第1の出力交流信号(2sinθ・sinωt)が得られる。また、コサイン相とマイナス・コサイン相の誘導出力を差動的に合成することによりコサイン関数の振幅関数を持つ第2の出力交流信号(2cosθ・sinωt)が得られる。なお、表現の簡略化のために、係数「2」を省略して、以下では、第1の出力交流信号を「sinθ・sinωt」で表わし、第2の出力交流信号を「cosθ・sinωt」で表わす。
なお、このリニアセンサ20の動作説明においても、傾斜センサ100の前記説明と同様に、便宜上、位相角の符号を“θ”としているが、傾斜センサ100の説明で使用する“θ”と、リニアセンサ20の説明で使用する“θ”とは、べつものであるのは勿論である。すなわち、傾斜センサ100の説明で使用する“θ”は、前述の通り、X,Y軸についての傾斜方向を示すものであるのに対して、リニアセンサ20の説明で使用する“θ”は、前述の通り、Z軸方向のリニア変位に対応している。
【0037】
こうして、検出対象直線位置xに対応する第1の関数値sinθを振幅値として持つ第1の出力交流信号A=sinθ・sinωtと、同じ検出対象直線位置xに対応する第2の関数値cosθを振幅値として持つ第2の出力交流信号B=cosθ・sinωtとが出力される。このようなコイル構成によれば、回転型位置検出装置である従来知られたレゾルバにおいて得られるのと同様の、同相交流であって2相の振幅関数を持つ2つの出力交流信号(サイン出力とコサイン出力)を直線位置検出装置において得ることができることが理解できる。従って、このリニアセンサ200から得られる2相の出力交流信号(A=sinθ・sinωtとB=cosθ・sinωt)は、従来知られたレゾルバの出力と同様の使い方をすることができる。例えば、図5の例と同様に、図7においてもディジタル位相検出回路40にこれらの2相の出力交流信号A,Bを入力してディジタル位相検出によって位相値θに対応するディジタルデータを得て、これをZ軸方向の操作量の検出データDzとすることができる。その場合、ディジタル位相検出回路40の共通利用可能なハードウェア回路を、傾斜センサ100とリニアセンサ200の相方で時分割共用することができる。
なお、上記のように、4つの2次コイルSW1〜SW4を磁気応答部材203の繰り返しピッチの1ピッチpの範囲内において所定の間隔で配置した構成は、コイル部202全体のサイズを磁気応答部材203の1ピッチの範囲に略対応する比較的小さなサイズに収めることができるので、リニアセンサ200全体の構成を小型化することに役立つ。
【0038】
可動部204の一実施形態として、基部ロッドとしてピアノ線を使用し、磁気応答部材203として所定の金属片を使用し、ピアノ線からなる可動部204の周囲に、磁気応答部材203としての該金属片を所定のピッチで1又は複数繰り返して配置してそれぞれの金属片をかしめ止めすることによって、該所定のピッチで繰り返し配置した磁気応答部材203を構成するようにするとよい。このような可動部204の構成は、単に、所望の長さのピアノ線と所望の数の金属片とを用意し、該金属片を所望のピッチで該ピアノ線にかしめ止めすることだけで、製造することができるので、構成が極めて簡単であり、かつ製造が極めて容易であり、製造コストも極めて安価にすることができるので、かなり有意義である。しかも、可動部204つまり可動コア部の径は、ピアノ線の径に金属片(磁気応答部材203)の厚みを足した程度の小さなものとなり、これに伴い、コイル部202の各コイルの径もかなり小さくすることができるので、全体としてかなり小型化されたリニアセンサ200を提供することができる。
【0039】
更にその場合、磁気応答部材203としての前記金属片として、既存のスプリングピンを用いてもよく、そのようスプリングピンを用いると、かしめ止め加工作業も極めて容易になり、かつ、かしめ止めも確実になり、しかも安価であるから、極めて有利である。また、磁気応答部材203を形成するための前記金属片として展開状態では長方形のものを使用すると、これをロッド(ピアノ線)の周りにかしめ止めしたとき、図6に示すように、磁気応答部材203は略円筒形状となる。しかし、これに限らず、磁気応答部材203を形成するための前記金属片として展開状態では略円形乃至楕円形の金属片を使用してもよい。その他、磁気応答部材203の形状及び材質は任意である。勿論、傾斜センサ100の磁気応答部材3と同様に流動性の磁性体を用いることができる。
勿論、リニアセンサ200の検出原理は、上記のようなリニア・レゾルバ原理に従うものに限らず、その他のもの、例えば公知の差動トランスタイプのもの、あるいは、2相交流励磁1相出力タイプのような従来技術の項で説明した位相シフト型誘導リニアセンサでもよい。
【0040】
図1の例では、Z軸方向の操作は、スティック部10の本体に対してプッシャ201及び可動部204を相対的に上下動させることにより行われるようになっている。しかし、これに限らず、スティック部10の本体そのものを上下動させることによりZ軸方向の操作を行うようにしてもよい。図8はその場合の一例を示すZ軸方向一部断面側面図である。
図8において、スティック部10は、頂部10aと棒状部10bとを含む一体部分(側面略図で示す)が握り部10d(断面で示す)に対してZ軸方向に相対的に上下動可能な構成となっている。すなわち、握り部10d内に棒状部10bが下側から挿入されて、バネ10eによって棒状部10bが上向きに付勢され、つば状ストッパ10fによって変位0の初期位置に規制される。操作者が握り部10dを握って頂部10aを親指で押すと、頂部10aと一体の棒状部10bがZ軸方向に下向きに動かされる。この場合、傾斜センサ100は、図1の例と同様に頂部10a内に適宜設けられるてよいが、リニアセンサ200は、コイル部202を握り部10dの内側の所定位置に設け、磁気応答部材203を棒状部10bの下側の所定位置の周囲に適宜設ける。
【0041】
次に、本発明の第2の観点に従う3次元操作検出装置の一実施例につき、図9によって説明する。図9の実施例は、スティック部10をZ軸方向に(上下に)振る動作によってZ軸方向の操作を行えるようにしたものである。
図9において、スティック部10の頂部10aは側面図で示し、この内部には図1と同様に適宜の傾斜センサ100が設けられる。スティック部10の棒状部10bはリニアセンサ200’を内蔵している部分を切り欠いて一部断面で示している。このリニアセンサ200’は、スティック部10をZ軸方向に(上下に)振る動作に基づくZ軸方向の操作を検出するものである。
リニアセンサ200’は、棒状部10bの内部においてZ軸方向に沿って延びた収納空間205と、この収納空間205の周囲に設けられたコイル部202と、この収納空間205内にて重力に従って移動自在に収納された磁気応答部材203’とを含んでいる。磁気応答部材203’としては、空間205内を重力に従って自由に動きうる適宜のサイズの磁性体(球体あるいは円板等の適宜の形状であってよい)を使用することができるし、あるいは、適量の磁性流体あるいは磁性粉体等であってもよい。これによって、スティック部10をZ軸方向に(上下に)振る動作によって、慣性作用により、収納空間205内で磁気応答部材203’がコイル部202に対して相対的に変位し、Z軸方向の動きに応じた検出出力信号をコイル部202から出力することができる。
【0042】
次に、本発明の第3の観点に従う3次元操作検出装置の一実施例につき、図10によって説明する。図10の実施例は、3次元操作入力手段として、手で握るタイプの棒状のスティック部10を使用せずに、テーブル上等に任意に置いて、又は半固定的に設置して、使用できるようにしたものである。
図10(a)はX−Y軸方向に沿う平面図、(b)はZ軸に沿う断面略図である。この3次元操作検出装置の外観は、上側の操作部10aと、下側のベース部10bとからなっている。操作部10aは、ベース部10bに対してX軸及びY軸方向に傾き可能及びZ軸方向に上下動可能に配置されている。操作部10aには、その下側に傾斜センサ100が設けられていると共に、リニアセンサ200の可動部204が設けられている。可動部204の下側の所定箇所には、図1の例と同様に、リニアセンサ200の磁気応答部材203が設けられている。また、ベース部10bの内部の所定箇所には、図1の例と同様に、リニアセンサ200のコイル部202が設けられている。かくして、傾斜センサ100とリニアセンサ200の具体的構成は、本明細書で説明する欠く実施例と同様の構成を使用してよい。
【0043】
上面からみると円形を成している操作部10aの略中央が適当に膨らんでいて、ここがZ軸方向の操作を加えるためのZプッシャ部10zに相当する。また、操作部10aにおけるZプッシャ部10zの周囲のリング状平面が、X軸及びY軸方向に任意の傾き操作を加えるためのXYプッシャ部10xyに相当する。この操作部10aは、リング状のXYプッシャ部10xyの下方において、少なくとも90度間隔の4点において、バネ10cを介してベース部10bに対して上下動可能に支持されている。
この構成によって、操作部10aにおけるリング状のXYプッシャ部10xyの任意の点を指で押すと、操作部10aがその押された方向に傾く。この操作部10aの傾きは、前述と同様に、傾斜センサ100によって検出される。また、操作部10aにおける中央のZプッシャ部10zを指で押すと、操作部10aの全体が下方に(Z軸方向に)移動する。この操作部10aのZ軸方向の変位は、前述と同様に、リニアセンサ200によって検出される。
なお、ベース部10bを任意の使用場所に固定して、この検出装置を半固定的に設置するようにしてもよい。もしくは、操作部10a及びベース部10bを含む装置全体を持ち運び可能として、任意の場所でこの検出装置を使用できるようにしてもよい。
【0044】
なお、上記各実施例では、Z軸方向の操作は、下向きにのみ行うようになっているが、これに限らず、上下両方向に任意に操作できるようにしてもよい。その例を示すと図11,図12のようである。
図11は、図1の変形を示しており、同一符号は同一装置を示す。図11の例では、スティック部10の棒状部10bの下端に、上向き操作を行うためのプッシャ206が設けられている。プッシャ206には可動部204の下端が接続されている。プッシャ206は、プッシャ201と同様に、ゴム等の弾性体からなる。この構成によって、上のプッシャ201を押すことによりZ軸方向の下向き操作を行うことができ、下のプッシャ206を押すことによりZ軸方向の上向き操作を行うことができる。
図12は、可動部204の上端を外部に突出させ、この上端を指で下向きに押したり、指でつまんで上向きに引き上げることができるようにした例を示す。可動部204の下端又は適宜箇所にバネ207が設けられており、可動部204に操作が加えられていないときは中立位置となり、可動部204の上向き及び下向きの動き応じて該バネ207が伸びたり縮んだりする。なお、可動部204の上下動範囲を限界づけるための適宜のストッパ部208が設けられる。この構造は、図1のタイプに限らず、図10のタイプにも応用できる。
【0045】
次に、傾斜センサ100の他の実施例について説明する。
図2に示した傾斜センサ100は、XY座標面の傾斜を1つのセンサで一挙に検出する例であるが、これに限らず、一方向の(1軸用の)傾斜計を2個組み合わせて2軸傾斜検出を行うようにしてもよい。
図13は、そのような目的で使用できる1軸用の傾斜計100Xの一例を示す軸方向断面図である。プラスチックあるいはステンレス等の非磁性体からなる収納体101は巻軸のような形状をなしており、その軸の内部には、図示のように、下側にわん曲した通路101aが設けられている。この通路101a内には、適宜のサイズ又は量の磁気応答部材103が重力に従って移動自在に収納されている。磁気応答部材103は、図13の例では、球形状をした例えば鉄のような磁性体からなっている。収納体101の通路101aの周囲つまり巻軸の周囲には、1又は複数のコイル111〜115,121〜124が順次配置されて巻かれている。これらのコイル111〜115,121〜124によりコイル部102が構成されている。なお、通路101aの両端は閉じられていて、内部の磁気応答部材103が飛び出ないようになっている。
【0046】
上記の構成によって、通路101a内における磁気応答部材103のリニア位置つまり、コイル部102に対する磁気応答部材103の相対的直線位置に応じて、コイル部102における誘導結合が変化し、これに応じた出力信号を該コイル部102より得ることができる。従って、通路101a内における磁気応答部材103のリニア位置に応じた検出出力信号をコイル部102から得るようにすることができる。
ここで、収納体101の通路101aは、下側にわん曲しているため、該収納体101が水平位置におかれているとき、該通路101a内の磁気応答部材103は自重により必ず所定の位置(傾斜0に対応する一番低い位置)に位置する。収納体101が傾くと、それに応じて通路101aに沿って磁気応答部材103がリニアに変位し、該通路101aにおける前記磁気応答部材103のリニア位置に応じた検出出力信号が前記コイル部102から得られる。従って、コイル部102の出力信号は収納体101の傾きに応答するものであり、該傾きの検知信号として適宜利用できる。
【0047】
コイル部102による検出原理としては、任意のものを用いることができる。単純な例としては、ピックアップコイル方式があり得る。すなわち通路101aに沿って配置した複数のコイルの出力信号レベルに基づき、磁気応答部材103が最も近接したコイルを特定することにより、通路101aにおける磁気応答部材103のリニア位置を検出することができ、従って、収納体101の傾斜の度合いを検知/検出することができる。より細かく磁気応答部材103のリニア位置を検出するための一例として、リニア差動トランス原理に従ってコイル部102を構成することができる。すなわち、コイル部102として1個又は複数のリニア差動トランスを構成し、該リニア差動トランスの出力電圧値とどのリニア差動トランスから出力が得られたかを示すデータとの組み合わせによって、前記ピックアップコイル方式よりは細かい精度で磁気応答部材103のリニア位置を検出することができる。
【0048】
更に細かい精度で、かつ正確に、磁気応答部材103のリニア位置を検出し得るようにするには、レゾルバ原理に従ってコイル部102を構成するとよい。
レゾルバ原理に従ってコイル部102を構成する場合、1相の交流信号によって励磁される1次コイル111〜115と、複数の2次コイル121〜124とを含む。各2次コイル121〜124は、通路101aに沿って所定の間隔でずらして配置される。一方、1相の交流信号によって共通に励磁されるが故に、1次コイル111〜115の数は、1又は適宜の複数であってよく、その配置も適宜であってよい。しかし、複数の1次コイル111〜115を適宜に分離して、例えば図13に示されるように各2次コイル121〜124をそれぞれの間に挟むように、配置することは、1次コイルによって発生する磁界を個別の2次コイル121〜124に対して有効に及ぼし、かつ磁気応答部材103による磁場への影響を有効に及ぼすことができるので、好ましい。
【0049】
通路101aにおける磁気応答部材103のリニア位置に応じて、磁気応答部材103のコイル部102に対する対応位置が変化することにより、1次コイル111〜115と各2次コイル121〜124間の磁気結合が該リニア位置に応じて変化され、これにより、該リニア位置に応じて振幅変調された誘導出力交流信号が、各2次コイル121〜124の配置のずれに応じて異なる振幅関数特性で、各2次コイル121〜124に誘起される。各2次コイル121〜124に誘起される各誘導出力交流信号は、1次コイル111〜115が1相の交流信号によって共通に励磁されるが故に、その電気的位相が同相であり、その振幅関数が各2次コイル121〜124の配置のずれに応じてずれた位相を有する。
すなわち、4つの2次コイル121〜124に生じる誘導出力交流信号の振幅関数が、所望の特性を示すように設定することが可能であり、レゾルバタイプの位置検出装置として構成する場合は、各2次コイル121〜124に生じる誘導出力交流信号の振幅関数が、サイン関数、コサイン関数、マイナス・サイン関数、マイナス・コサイン関数、にそれぞれ相当するように設定することが可能である。種々の条件によって、各コイルの配置は微妙に変わり得るので、希望の関数特性が得られるように各コイルの配置や巻数を適宜調整したり、あるいは2次出力レベルを電気的増幅によって調整して、希望の振幅関数特性が最終的に得られるようにする。
【0050】
例えば、2次コイル121の出力がサイン関数(図でsを付記する)に対応するとすると、これに対して所定距離(例えばp/2とする)だけずれて配置された2次コイル123の出力はマイナス・サイン関数(図で/s(sバー)を付記する)に相当するように設定し、この両者の出力を差動的に合成することによりサイン関数の振幅関数を持つ第1の出力交流信号を得るようにすることができる。また、サイン関数出力に対応する2次コイル121から前記所定距離の半分(例えばp/4とする)だけずれて配置された2次コイル122の出力はコサイン関数(図でcを付記する)に対応し、これに対してp/2だけずれて配置された2次コイル124の出力はマイナス・コサイン関数(図で/c(cバー)を付記する)に相当するように設定し、この両者の出力を差動的に合成することによりコサイン関数の振幅関数を持つ第2の出力交流信号を得るようにすることができる。
【0051】
磁気応答部材103の形状は球に限らず、円筒形その他の適宜の形状であってもよい。また、磁気応答部材103は固形のものに限らず、例えば磁性流体や磁性粉体のような非固定形状の物体からなるものであってもよい。また、磁気応答部材103の材質は磁性体に限らず、銅のような良導電体であってもよい。
図13では、収納体101の外観は、ボビン若しくは巻き軸のようであるが、これに限らず、チューブを曲げた形状からなっていてもよい。その場合は、曲げられたチューブ(収納体101)の周りにコイル部102を嵌め込むようにすればよい。
勿論、コイル部102における1次及び2次コイルの数及び配置も様々な変形や設計変更が可能である。また、2次コイル出力信号の相数もサイン,コサインの2相に限らず、他の形態、例えば120度ずれた3相タイプ、であってもよい。
【0052】
以上のような傾斜計100Xは通路101aの方向に沿う一方向(1軸)のみについての傾斜を検出することができるものである。XY座標面の傾斜を検出するためには、図示例のような1軸傾斜計100XをX軸又はY軸について少なくとも1つ設け、他の軸のためには、別のタイプの適当な一方向傾斜計を設けるようにしてもよい。勿論、図13に示したような同じタイプの1軸傾斜計100Xを2個直交させて設けて、XY座標面の傾斜を検出するための傾斜センサ100を構成してもよい。図14はその一例を略示するものであり、互いに90度の角度で交差するように2つの傾斜計100X,100Yを組み合わせたものである。各傾斜計100X,100Yは、図13の傾斜計100Xと夫々同一構成である。これによって、検出対象のX軸方向の傾斜(傾斜成分)を傾斜計100Xで検出することができ、該検出対象のY軸方向の傾斜(傾斜成分)を傾斜計100Yで検出することができる。なお、図14の構成を変形して、X,Y軸に対応する各傾斜計100X,100Yの収納体101内の通路101aのわん曲を大きくとるようにしてもよい。
【0053】
なお、X軸及びY軸の操作を検出するための、第1のコイル部2と磁気応答部材3とを含む第1の検出手段(傾斜センサ100)は、上記実施例のように、必ずしも傾斜検出装置である必要はない。例えば、X軸及びY軸方向に、スティック部10を水平移動させるような操作を検出するもの、すなわち加速又は衝撃検出装置であってもよい。そのような加速又は衝撃検出装置は、上述の傾斜センサ100によっても構成できるし、上述の傾斜センサ100を適宜一部変形しても構成できる。すなわち、流動性の磁気応答部材3は、そのような瞬間の加速又は衝撃に応答して慣性作用に応じて変位するので、それに応答する出力を発生することができる。また、図13のような1軸傾斜計100の通路101aを直線状にしてもそのような瞬間の加速又は衝撃に応答する出力信号を得ることができる。
【0054】
ところで、本発明に係る3次元操作検出装置を実施するにあたっては、上述の構成すべてを具備する必要はなく、少なくとも1つを具備していても有効である。例えば、X軸及びY軸操作検出用のXY座標面傾斜検出装置すなわち傾斜センサ100は、上述で例示されたいずれかの構成に従うものとし、Z軸操作検出手段は他の適宜のリニア検出手段(光学式センサ、永久磁石又は磁化パターン利用のリニアセンサ、ポテンショメータ等)を使用してもよい。反対に、Z軸操作検出手段は例示されたリニアセンサ200のいずれかの構成に従うものとし、X軸及びY軸操作検出手段は、誘導式センサ以外の他の適宜の構成を用いてもよい。X軸及びY軸操作検出手段として利用可能な誘導式センサ以外の検出手段の一例を示すと、図10の例において、操作部10aのリング状のXYプッシャ部10xyの表面をタッチセンサを用いるような変更例が考えられる。勿論、そのような変更例を採用する場合は、図10における誘導式の傾斜センサ100を省略する。
【0055】
次に、図5に示したディジタル位相検出回路40のいくつかの例について説明する。以下で説明するディジタル位相検出回路40の各例は、図5に示したディジタル位相検出回路40に限らず、図7に示したディジタル位相検出回路40においても適用可能であり、また、図13に示した1軸傾斜計100Xの出力信号の位相をディジタル測定する場合においても適用可能である。しかし、以下の説明では、便宜的に、図5に示したディジタル位相検出回路40つまり傾斜センサ100の出力信号の位相測定のための使用されているものとして説明する。
図15は、ディジタル位相検出回路40として、公知のR−D(レゾルバ−ディジタル)コンバータを適用した例を示す。コイル部2の2次コイル21〜24から出力されるレゾルバタイプの2相の出力交流信号A=sinθ・sinωtとB=cosθ・sinωtが、それぞれアナログ乗算器30,31に入力される。順次位相発生回路32では位相角φのディジタルデータを発生し、サイン・コサイン発生回路33から該位相角φに対応するサイン値sinφとコサイン値cosφのアナログ信号を発生する。乗算器30では、サイン相の出力交流信号A=sinθ・sinωtに対してサイン・コサイン発生回路33からのコサイン値cosφを乗算し、「cosφ・sinθ・sinωt」を得る。もう一方の乗算器31では、コサイン相の出力交流信号B=cosθ・sinωtに対してサイン・コサイン発生回路33からのサイン値sinφを乗算し、「sinφ・cosθ・sinωt」を得る。引算器34で、両乗算器30,31の出力信号の差を求め、この引算器34の出力によって順次位相発生回路32の位相発生動作を次のように制御する。すなわち、順次位相発生回路32の発生位相角φを最初は0にリセットし、以後順次増加していき、引算器34の出力が0になったとき増加を停止する。引算器34の出力が0になるのは、「cosφ・sinθ・sinωt」=「sinφ・cosθ・sinωt」が成立したときであり、すなわち、φ=θが成立し、順次位相発生回路32から位相角φのディジタルデータが出力交流信号A,Bの振幅関数の位相角θのディジタル値に一致している。従って、任意のタイミングで周期的にリセットトリガを与えて順次位相発生回路32の発生位相角φを0にリセットして、該位相角φのインクリメントを開始し、引算器34の出力が0になったとき、該インクリメントを停止し、位相角θのディジタルデータを得る。
なお、順次位相発生回路32をアップダウンカウンタ及びVCOを含んで構成し、引算器34の出力によってVCOを駆動してアップダウンカウンタのアップ/ダウンカウント動作を制御するようにすることが知られており、その場合は、周期的なリセットトリガは不要である。
【0056】
温度変化等によってコイル部2の1次及び2次コイルのインピーダンスが変化することにより2次出力交流信号における電気的交流位相ωtに誤差が生じるが、上記のような位相検出回路においては、sinωtの位相誤差は自動的に相殺されるので、好都合である。これに対して、従来知られた2相交流信号(例えばsinωtとcosωt)で励磁することにより1相の出力交流信号に電気的位相シフトが生じるようにした方式では、そのような温度変化等に基づく出力位相誤差を除去することができない。
ところで、上記のような従来のR−Dコンバータからなる位相検出回路は、追従比較方式であるため、φを追従カウントするときのクロック遅れが生じ、応答性が悪い、という問題がある。
そこで、本発明者等は、以下に述べるような新規な位相検出回路を開発したので、これを使用すると好都合である。
【0057】
図16は、上述の傾斜センサ100その他において適用可能な新規なディジタル位相検出回路40の一実施形態を示している。
図16において、検出回路部41では、カウンタ42で所定の高速クロックパルスCKをカウントし、そのカウント値に基づき励磁信号発生回路43から励磁用の交流信号(例えばsinωt)を発生し、コイル部2の1次コイル11〜14に与える。カウンタ42のモジュロ数は、励磁用の交流信号の1周期に対応しており、説明の便宜上、そのカウント値の0は、基準のサイン信号sinωtの0位相に対応しているものとする。コイル部2の2次コイル21〜24から出力される2相の出力交流信号A=sinθ・sinωtとB=cosθ・sinωtは、検出回路部41に入力される。
【0058】
検出回路部41において、第1の交流出力信号A=sinθ・sinωtが位相シフト回路44に入力され、その電気的位相が所定量位相シフトされ、例えば90度進められて、位相シフトされた交流信号A’=sinθ・cosωtが得られる。また、検出回路部41においては加算回路45と減算回路46とが設けられており、加算回路45では、位相シフト回路44から出力される上記位相シフトされた交流信号A’=sinθ・cosωtとコイル部2の2次コイル21〜24から出力され第2の交流出力信号B=cosθ・sinωtとが加算され、その加算出力として、B+A’=cosθ・sinωt+sinθ・cosωt=sin(ωt+θ)なる略式で表わせる第1の電気的交流信号Y1が得られる。減算回路46では、上記位相シフトされた交流信号A’=sinθ・cosωtと上記第2の交流出力信号B=cosθ・sinωtとが減算され、その減算出力として、B−A’=cosθ・sinωt−sinθ・cosωt=sin(ωt−θ)なる略式で表わせる第2の電気的交流信号Y2が得られる。このようにして、収納空間1a内の磁気応答部材3の分布に対応して正方向にシフトされた電気的位相角(+θ)を持つ第1の電気的交流信号Y1=sin(ωt+θ)と、同じ分布に対応して負方向にシフトされた電気的位相角(−θ)を持つ第2の電気的交流信号Y2=sin(ωt−θ)とが、電気的処理によって夫々得られる。
【0059】
加算回路45及び減算回路46の出力信号Y1,Y2は、夫々ゼロクロス検出回路47,48に入力され、それぞれのゼロクロスが検出される。ゼロクロスの検出の仕方としては、例えば、各信号Y1,Y2の振幅値が負から正に変化するゼロクロスつまり0位相を検出する。各回路47,48で検出したゼロクロス検出パルスつまり0位相検出パルスは、ラッチパルスLP1,LP2として、ラッチ回路49,50に入力される。ラッチ回路49,50では、カウンタ42のカウント値を夫々のラッチパルスLP1,LP2のタイミングでラッチする。前述のように、カウンタ42のモジュロ数は励磁用の交流信号の1周期に対応しており、そのカウント値の0は基準のサイン信号sinωtの0位相に対応しているものとしたので、各ラッチ回路49,50にラッチしたデータD1,D2は、それぞれ、基準のサイン信号sinωtに対する各出力信号Y1,Y2の位相ずれに対応している。各ラッチ回路49,50の出力は誤差計算回路51に入力されて、「(D1+D2)/2」の計算が行なわれる。なお、この計算は、実際は、「D1+D2」のバイナリデータの加算結果を1ビット下位にシフトすることで行われるようになっていてよい。
【0060】
ここで、コイル部2と検出回路部41間の配線ケーブル長の長短による影響や、コイル部2の各1次及び2次コイルにおいて温度変化等によるインピーダンス変化が生じていることを考慮して、その出力信号の位相変動誤差を「±d」で示すと、検出回路部41における上記各信号は次のように表わされる。
A=sinθ・sin(ωt±d)
A’=sinθ・cos(ωt±d)
B=cosθ・sin(ωt±d)
Y1=sin(ωt±d+θ)
Y2=sin(ωt±d−θ)
D1=±d+θ
D2=±d−θ
【0061】
すなわち、各位相ずれ測定データD1,D2は、基準のサイン信号sinωtを基準位相に使用して位相ずれカウントを行なうので、上記のように位相変動誤差「±d」を含む値が得られてしまう。そこで、誤差計算回路51において、「(D1+D2)/2」の計算を行なうことにより、
【0062】
誤差計算回路51で求められた位相変動誤差「±d」のデータは、減算回路52に与えられ、一方の位相ずれ測定データD1から減算される。すなわち、減算回路52では、「D1−(±d)」の減算が行なわれるので、
D1−(±d)=±d+θ−(±d)=θ
となり、位相変動誤差「±d」を除去した正しい検出位相差θを示すディジタルデータが得られる。このように、本発明によれば、位相変動誤差「±d」が相殺されて、正しい位相差θのみが抽出されることが理解できる。
【0063】
この点を図17を用いて更に説明する。図17においては、位相測定の基準となるサイン信号sinωtと前記第1及び第2の交流信号Y1,Y2の0位相付近の波形を示しており、同図(a)は位相変動誤差がプラス(+d)の場合、(b)はマイナスの場合(−d)を示す。同図(a)の場合、基準のサイン信号sinωtの0位相に対して第1の信号Y1の0位相は「θ+d」だけ進んでおり、これに対応する位相差検出データD1は「θ+d」に相当する位相差を示す。また、基準のサイン信号sinωtの0位相に対して第2の信号Y2の0位相は「−θ+d」だけ遅れており、これに対応する位相差検出データD2は「−θ+d」に相当する位相差を示す。この場合、誤差計算回路51では、
D1−(+d)=+d+θ−(+d)=θ
が計算され、正しい位相差θが抽出される。
【0064】
図17(b)の場合、基準のサイン信号sinωtの0位相に対して第1の信号Y1の0位相は「θ−d」だけ進んでおり、これに対応する位相差検出データD1は「θ−d」に相当する位相差を示す。また、基準のサイン信号sinωtの0位相に対して第2の信号Y2の0位相は「−θ−d」だけ遅れており、これに対応する位相差検出データD2は「−θ−d」に相当する位相差を示す。この場合、誤差計算回路51では、
D1−(−d)=−d+θ−(−d)=θ
が計算され、正しい位相差θが抽出される。
なお、減算回路52では。「D2−(±d)」の減算を行なうようにしてもよく、原理的には上記と同様に正しい位相差θを反映するデータ(−θ)が得られることが理解できるであろう。
【0065】
また、図17からも理解できるように、第1の信号Y1と第2の信号Y2との間の電気的位相差は2θであり、常に、両者における位相変動誤差「±d」を相殺した正確な位相差θの2倍値を示していることになる。従って、図16におけるラッチ回路49,50及び誤差計算回路51及び減算回路52等を含む回路部分の構成を、信号Y1,Y2の電気的位相差2θをダイレクトに求めるための構成に適宜変更するようにしてもよい。例えば、ゼロクロス検出回路47から出力される第1の信号Y1の0位相に対応するパルスLP1の発生時点から、ゼロクロス検出回路48から出力される第2の信号Y2の0位相に対応するパルスLP2の発生時点までの間を適宜の手段でゲートし、このゲート期間をカウントすることにより、位相変動誤差「±d」を相殺した、電気的位相差(2θ)に対応するディジタルデータを得ることができ、これを1ビット下位にシフトすれば、θに対応するデータが得られる。
【0066】
ところで、上記実施例では、+θをラッチするためのラッチ回路49と、−θをラッチするためのラッチ回路50とでは、同じカウンタ42の出力をラッチするようにしており、ラッチしたデータの正負符号については特に言及していない。しかし、データの正負符号については、本発明の趣旨に沿うように、適宜の設計的処理を施せばよい。例えば、カウンタ42のモジュロ数が4096(10進数表示)であるとすると、そのディジタルカウント0〜4095を0度〜360度の位相角度に対応させて適宜に演算処理を行なうようにすればよい。最も単純な設計例は、カウンタ42のカウント出力の最上位ビットを符号ビットとし、ディジタルカウント0〜2047を+0度〜+180度に対応させ、ディジタルカウント2048〜4095を−180度〜−0度に対応させて、演算処理を行なうようにしてもよい。あるいは、別の例として、ラッチ回路50の入力データ又は出力データを2の補数に変換することにより、ディジタルカウント4095〜0を−360度〜−0度の負の角度データ表現に対応させるようにしてもよい。
【0067】
ところで、傾斜が静止状態のときは特に問題ないのであるが、検出対象傾斜が時間的に変化するときは、それに対応する位相角θも時間的に変動することになる。その場合、加算回路45及び減算回路46の各出力信号Y1,Y2の位相ずれ量θが一定値ではなく、移動速度に対応して時間的に変化する動特性を示すものとなり、これをθ(t)で示すと、各出力信号Y1,Y2は、
Y1=sin{ωt±d+θ(t)}
Y2=sin{ωt±d−θ(t)}
となる。すなわち、基準信号sinωtの周波数に対して、進相の出力信号Y1は+θ(t)に応じて周波数が高くなる方向に周波数遷移し、遅相の出力信号Y2は−θ(t)に応じて周波数が低くなる方向に周波数遷移する。このような動特性の下においては、基準信号sinωtの1周期毎に各信号Y1,Y2の周期が互いに逆方向に次々に遷移していくので、各ラッチ回路49,50における各ラッチデータD1,D2の計測時間基準が異なってくることになり、両データD1,D2を単純に回路51,52で演算するだけでは、正確な位相変動誤差「±d」を得ることができない。
【0068】
このような問題を回避するための最も簡単な方法は、図16の構成において、検出傾斜が時間的に動いているときの出力を無視し、静止状態のときの出力のみを用いて、静止状態が得られた時の位相角θを測定するように装置の機能を限定することである。すなわち、そのような限定された目的のために本発明を実施するようにしてもよいものである。
しかし、検出対象傾斜が時間的に変化している最中であっても時々刻々の該検出対象傾斜に対応する位相角θを正確に検出できるようにすることが望ましい。そこで、上記のような問題点を解決するために、検出対象傾斜が時間的に変化している最中であっても時々刻々の該検出対象傾斜に対応する位相角θを検出できるようにした改善策について図18を参照して説明する。
【0069】
図18は、図16の検出回路部41における誤差計算回路51と減算回路52の部分の変更例を抽出して示しており、他の図示していない部分の構成は図16と同様であってよい。検出対象傾斜が時間的に変化している場合における該傾斜方向に対応する位相角θを、+θ(t)および−θ(t)で表わすと、各出力信号Y1,Y2は前記のように表わせる。そして、夫々に対応してラッチ回路49,50で得られる位相ずれ測定値データD1,D2は、
D1=±d+θ(t)
D2=±d−θ(t)
となる。
この場合、±d+θ(t) は、θの時間的変化に応じて、プラス方向に0度から360度の範囲で繰り返し時間的に変化してゆく。また、±d−θ(t) は、θの時間的変化に応じて、マイナス方向に360度から0度の範囲で繰り返し時間的に変化してゆく。従って、±d+θ(t) ≠ ±d−θ(t) のときもあるが、両者の変化が交差するときもあり、そのときは±d+θ(t) = ±d−θ(t) が成立する。このように、±d+θ(t) = ±d−θ(t) が成立するときは、各出力信号Y1,Y2の電気的位相が一致しており、かつ、夫々のゼロクロス検出タイミングに対応するラッチパルスLP1,LP2の発生タイミングが一致していることになる。
【0070】
図18において、一致検出回路53は、各出力信号Y1,Y2ののゼロクロス検出タイミングに対応するラッチパルスLP1,LP2の発生タイミングが、一致したことを検出し、この検出に応答して一致検出パルスEQPを発生する。一方、時変動判定回路54では、適宜の手段により(例えば一方の位相差測定データD1の値の時間的変化の有無を検出する等の手段により)、検出対象傾斜が時間的に変化するモードであることを判定し、この判定に応じて時変動モード信号TMを出力する。
誤差計算回路51と減算回路52との間にセレクタ55が設けられており、上記時変動モード信号TMが発生されていないとき、つまりTM=“0”すなわち検出対象傾斜が時間的に変化していないとき、セレクタ入力Bに加わる誤差計算回路51の出力を選択して減算回路52に入力する。このようにセレクタ55の入力Bが選択されているときの図18の回路は、図16の回路と等価的に動作する。すなわち、検出対象が静止しているときは、誤差計算回路51の出力データがセレクタ55の入力Bを介して減算回路52に直接的に与えられ、図16の回路と同様に動作する。
【0071】
一方、上記時変動モード信号TMが発生されているとき、つまりTM=“1”すなわち検出対象が時間的に変化しているときは、セレクタ55の入力Aに加わるラッチ回路56の出力を選択して減算回路52に入力する。上記時変動モード信号TMが“1”で、かつ前記一致検出パルスEQPが発生されたとき、アンドゲート57の条件が成立して、該一致検出パルスEQPに応答するパルスがアンドゲート57から出力され、ラッチ回路56に対してラッチ命令を与える。ラッチ回路56は、このラッチ命令に応じてカウンタ42の出力カウントデータをラッチする。ここで、一致検出パルスEQPが生じるときは、カウンタ42の出力をラッチ回路49,50に同時にラッチすることになるので、D1=D2であり、ラッチ回路56にラッチするデータは、D1又はD2(ただしD1=D2)に相当している。
【0072】
また、一致検出パルスEQPは、各出力信号Y1,Y2のゼロクロス検出タイミングが一致したとき、すなわち「±d+θ(t) = ±d−θ(t)」が成立したとき、発生されるので、これに応答してラッチ回路56にラッチされるデータは、D1又はD2(ただしD1=D2)に相当しているが故に、
(D1+D2)/2
と等価である。このことは、
【0073】
こうして、検出対象が時間的に変動しているときは、位相変動誤差「±d」を正確に示すデータが一致検出パルスEQPに応じてラッチ回路56にラッチされ、このラッチ回路56の出力データがセレクタ55の入力Aを介して減算回路52に与えられる。従って、減算回路52では、位相変動誤差「±d」を除去した検出対象傾斜方向に正確に応答するデータθ(時間的に変動する場合はθ(t) )を得ることができる。
なお、図18において、アンドゲート57を省略して、一致検出パルスEQPを直接的にラッチ回路56のラッチ制御入力に与えるようにしてもよい。
また、ラッチ回路56には、カウンタ42の出力カウントデータに限らず、図16で破線で示すように誤差計算回路51の出力データ「±d」をラッチするようにしてもよい。その場合は、一致検出パルスEQPの発生タイミングに対して、それに対応する誤差計算回路51の出力データの出力タイミングが、ラッチ回路49,50及び誤差計算回路51の回路動作遅れの故に、幾分遅れるので、適宜の時間遅れ調整を行なった上で、誤差計算回路51の出力をラッチ回路56にラッチするようにするとよい。
また、動特性のみを考慮して検出回路部41を構成する場合は、図18の回路51及びセレクタ55と図16の一方のラッチ回路49又は50を省略してもよいことが、理解できるであろう。
【0074】
図19は、位相変動誤差「±d」を相殺することができる位相差検出演算法についての別の実施例を示す。
コイル部2の2次コイル21〜24から出力されるレゾルバタイプの前記第1及び第2の交流出力信号A,Bは、検出回路部60に入力され、図16の例と同様に、第1の交流出力信号A=sinθ・sinωtが位相シフト回路44に入力され、その電気的位相が所定量位相シフトされて、位相シフトされた交流信号A’=sinθ・cosωtが得られる。また、減算回路46では、上記位相シフトされた交流信号A’=sinθ・cosωtと上記第2の交流出力信号B=cosθ・sinωtとが減算され、その減算出力として、B−A’=cosθ・sinωt−sinθ・cosωt=sin(ωt−θ)なる略式で表わせる電気的交流信号Y2が得られる。減算回路46の出力信号Y2はゼロクロス検出回路48に入力され、ゼロクロス検出に応じてラッチパルスLP2が出力され、ラッチ回路50に入力される。
【0075】
図19の実施例が図16の実施例と異なる点は、検出対象に対応する電気的位相ずれを含む交流信号Y2=sin(ωt−θ)から、その位相ずれ量θを測定する際の基準位相が相違している点である。図16の例では、位相ずれ量θを測定する際の基準位相は、基準のサイン信号sinωtの0位相であり、これは、傾斜計10のコイル部2に入力されるものではないので、温度変化等によるコイルインピーダンス変化やその他の各種要因に基づく位相変動誤差「±d」を含んでいないものである。そのために、図16の例では、2つの交流信号Y1=sin(ωt+θ)及びY2=sin(ωt−θ)を形成し、その電気的位相差を求めることにより、位相変動誤差「±d」を相殺するようにしている。これに対して、図19の実施例では、コイル部2から出力される第1及び第2の交流出力信号A,Bを基にして、位相ずれ量θを測定する際の基準位相を形成し、該基準位相そのものが上記位相変動誤差「±d」を含むようにすることにより、上記位相変動誤差「±d」を排除するようにしている。
【0076】
すなわち、検出回路部60において、コイル部2から出力された前記第1及び第2の交流出力信号A,Bがゼロクロス検出回路61,62に夫々入力され、それぞれのゼロクロスが検出される。なお、ゼロクロス検出回路61,62は、入力信号A,Bの振幅値が負から正に変化するゼロクロス(いわば0位相)と正から負に変化するゼロクロス(いわば180度位相)のどちらにでも応答してゼロクロス検出パルスを出力するものとする。これは信号A,Bの振幅の正負極性を決定するsinθとcosθがθの値に応じて任意に正又は負となるため、両者の合成に基づき360度毎のゼロクロスを検出するためには、まず180度毎のゼロクロスを検出する必要があるためである。両ゼロクロス検出回路61,62から出力されるゼロクロス検出パルスがオア回路63でオア合成され、該オア回路63の出力が適宜の1/2分周パルス回路64(例えばT−フリップフロップのような1/2分周回路とパルス出力用アンドゲートを含む)に入力されて、1つおきに該ゼロクロス検出パルスが取り出され、360度毎のゼロクロスすなわち0位相のみに対応するゼロクロス検出パルスが基準位相信号パルスRPとして出力される。この基準位相信号パルスRPは、カウンタ65のリセット入力に与えられる。カウンタ65は所定のクロックパルスCKを絶えずカウントするものであるが、そのカウント値が、前記基準位相信号パルスRPに応じて繰返し0にリセットされる。このカウンタ65の出力がラッチ回路50に入力され、前記ラッチパルスLP2の発生タイミングで、該カウント値が該ラッチ回路50にラッチされる。ラッチ回路50にラッチしたデータDが、検出対象に対応した位相差θの測定データとして出力される。
【0077】
コイル部2から出力される第1及び第2の交流出力信号A,Bは、それぞれ、A=sinθ・sinωt、B=cosθ・sinωt、であり、電気的位相は同相である。従って、同じタイミングでゼロクロスが検出されるはずであるが、振幅係数がサイン関数sinθ及びコサイン関数cosθで変動するので、どちらかの振幅レベルが0か又は0に近くなる場合があり、そのような場合は、一方については、事実上、ゼロクロスを検出することができない。そこで、この実施例では、2つの交流出力信号A=sinθ・sinωt、B=cosθ・sinωtのそれぞれについてゼロクロス検出処理を行ない、両者のゼロクロス検出出力をオア合成することにより、どちらか一方が振幅レベル小によってゼロクロス検出不能であっても、他方の振幅レベル大の方のゼロクロス検出出力信号を利用できるようにしたことを特徴としている。
【0078】
図19の例の場合、コイル部2のコイルインピーダンス変化等による位相変動誤差が、例えば「−d」であるとすると、減算回路46から出力される交流信号Y2は、図20の(a)に示すように、Y2=sin(ωt−d−θ)となる。この場合、コイル部2の出力信号A,Bは、位相角θに応じた振幅値sinθ及びcosθを夫々持ち、図20の(b)に例示するように、A=sinθ・sin(ωt−d)、B=cosθ・sin(ωt−d)、というように位相変動誤差分を含んでいる。従って、このゼロクロス検出に基づいて図20の(c)のようなタイミングで得られる基準位相信号パルスRPは、本来の基準のサイン信号sinωtの0位相から位相変動誤差−dだけずれたものである。従って、この基準位相信号パルスRPを基準として、減算回路46の出力交流信号Y2=sin(ωt−d−θ)の位相ずれ量を測定すれば、位相変動誤差−dを除去した正確な値θが得られることになる。
【0079】
なお、コイル部2の配線長等の装置条件が定まると、そのインピーダンス変化は主に温度に依存することになる。そうすると、上記位相変動誤差±dは、この傾斜検出装置が配備された周辺環境の温度を示すデータに相当する。従って、図16の実施例のような位相変動誤差±dを演算する回路51を有するものにおいては、そこで求めた位相変動誤差±dのデータを温度検出データとして適宜出力することができる。従って、そのような本発明の構成によれば、1つの傾斜検出装置によって検出対象の傾斜を検出することができるのみならず、該傾斜検出装置の周辺環境の温度を示すデータをも得ることができる、という優れた効果を有するものである。勿論、温度変化等によるセンサ側のインピーダンス変化や配線ケーブル長の長短の影響を受けることなく、検出対象の傾斜に応答した高精度の検出が可能となる、という優れた効果をも奏するものである。また、図16や図図18,図19の例は、交流信号における位相差を測定する方式であるため、図15のような検出法に比べて、高速応答性にも優れた検出を行なうことができる、という優れた効果を奏する。
【0080】
なお、上記各実施例において、コイル部(2,102,202)と磁気応答部材(3,103,203)による検出原理を、公知の位相シフトタイプ位置検出原理によって構成してもよい。例えば、図5に示されたコイル部2において、1次コイルと2次コイルの関係を逆にして、サイン相のコイル21とマイナス・サイン相のコイル23を互いに逆相のサイン信号sinωt,−sinωtによって励磁し、コサイン相のコイル22とマイナス・コサイン相のコイル24を互いに逆相のコサイン信号cosωt,−cosωtによって励磁し、コイル11〜14から検出対象傾斜に応じた電気的位相シフトθを含む出力信号sin(ωt−θ)を得るようにしてもよい。
また、コイル部(2,102,202)と磁気応答部材(3,103,203)による検出原理を、公知の差動トランス型の位置検出原理に基づいてアナログ検出出力を得るように構成してもよいことは前述の通りである。
また、X,Y,Z各軸の操作検出の仕方は、必ずしも正確な操作位置を検出することを要せず、位置検出精度はおおまかであってもよく、また、単純にX,Y,Z軸方向に操作されたことを検知するだけであってもよい。
【0081】
あるいは、上記各実施例において、コイル部(2,102,202)の構成として、1次コイルと2次コイルの対を含むように構成せずに、1つのコイルのみによって構成し、該1つのコイルを所定の交流信号によって定電圧駆動し、該コイルへの磁性体(磁気応答部材3)の侵入量に応じて生じるインダクタンス変化に基づく電流変化を計測することにより、傾斜検出データを得るようにしてもよい。その場合、該電流変化に応答する出力信号の振幅変化を測定する方法、あるいは該電流変化に応答するコイル各端部での出力信号間の位相変化を測定する方法などによって所要の測定を行うことができる。
また、上記各実施例において、検出データの出力形式、もしくはデータ形成方式は、ディジタルアブソリュートデータまたはアナログ電圧データ等に限らず、インクリメンタルパルスデータあるいはアブソリュート値を周波数変換した繰り返しパルス信号など、あるいは或る方向への操作持続時間をカウントしたデータ形成など、あるいは加速度的な操作衝撃の大きさを検知して対応する大きさの適当なデータを形成するなど、利用目的に応じて適宜の形式としてよい。
【0082】
【発明の効果】
以上の通り、本発明によれば、スティック部に搭載された第1の検出手段に含まれる第1のコイル部と第1の磁気応答部材において、該スティック部のX軸及びY軸方向の動きに応じて該磁気応答部材が該コイル部に対して相対的に変位し得る構成を採用しているので、スティック部に該第1の検出手段の全体を搭載していながら、なおかつ該第1の検出手段によって該スティック部のX軸及びY軸方向の動きを検出することができるものとなる。従って、スティック部のX軸及びY軸方向の動きを検出するための第1の検出手段が、スティック部とは別に設けられずに、該スティック部にそっくり搭載されるので、構成を非常にコンパクトにすることができる。また、Z軸の操作を検出するための第2の検出手段もスティック部に搭載されるので、すべての軸の検出手段がスティック部に搭載されることになり、該スティック部を固定せずにフリーな状態で持ち歩きながら3次元操作入力を行うこともできるようになる。また、構造的に非接触であるという利点を持つ誘導型の検出装置を使用して、コンパクトな3次元操作検出装置にを提供することができる。
【図面の簡単な説明】
【図1】 本発明に係る3次元操作検出装置の一実施例を示す図。
【図2】 図1におけるXY面の傾斜を検出するための傾斜センサの詳細例を示す図。
【図3】 図2における収納空間内に収納された流動性磁気応答部材の傾斜時の状態を略示する図。
【図4】 図2におけるコイル部の構成例を示す回路図。
【図5】 図2におけるコイル部の別の構成例を示す回路図。
【図6】 図1におけるZ軸方向の操作を検出するためのリニアセンサの詳細例を示す図。
【図7】 図6におけるコイル部の構成例を示す回路図。
【図8】 本発明に係る3次元操作検出装置の別の実施例を示す図。
【図9】 本発明に係る3次元操作検出装置の更に別の実施例を示す図。
【図10】 本発明に係る3次元操作検出装置の更に他の実施例を示す図。
【図11】 本発明に係る3次元操作検出装置の更に他の実施例を示す図。
【図12】 本発明に係る3次元操作検出装置の更に他の実施例を示す図。
【図13】 本発明の各実施例におけるX軸又はY軸の一方向についての傾斜検出に使用できる傾斜計の一例を示す断面略図。
【図14】 図13の傾斜計を2軸分直交させて組み合わせて、XY面の傾斜を検出するための傾斜センサを構成する例を示す図。
【図15】 本発明に係る検出装置において適用可能な位相検出タイプの測定回路の一例を示すブロック図。
【図16】 本発明に係る検出装置において適用可能な位相検出タイプの測定回路の別の例を示すブロック図。
【図17】 図16の動作説明図。
【図18】 図16の回路に付加される変更例を示すブロック図。
【図19】 本発明に係る検出装置において適用可能な位相検出タイプの測定回路の更に別の例を示すブロック図。
【図20】 図19の動作説明図。
【符号の説明】
10 スティック部
10a 頂部
10b 棒状部
100 傾斜センサ
200 リニアセンサ
2,102,202 コイル部
11〜15 1次コイル
21〜24 2次コイル
3,103,203 磁気応答部材
27,28 判定処理回路
40 ディジタル位相検出回路
100X 1軸用の傾斜計
Claims (4)
- 人の手で持つことが可能な本体部と、
前記本体部に形成された収納空間内にて相対的に上下に直線変位可能に配され、前記本体部を上下に動かす操作に応答して該収納空間を直線変位する可動部材と、
前記本体部に搭載され、前記可動部材の前記本体部に対する相対的な直線変位を検出する直線位置検出手段と、
前記本体部に搭載され、前記可動部材の直線移動軸に直交するX−Y座標面上のX軸及びY軸方向の該本体部の傾きを検出する2次元傾斜検出手段と
を具えた3次元操作検出装置。 - 前記可動部材は、前記収納空間内にて重力に従って移動自在に収納された磁気応答部材からなり、前記直線位置検出手段は、前記収納空間の周囲に設けられたコイル部からなり、前記本体部の上下方向の動きに応じて前記コイル部に対して前記磁気応答部材が変位し、該動きに応じた検出信号を該コイル部から出力することを特徴とする請求項1に記載の3次元操作検出装置。
- 前記2次元傾斜検出手段は、コイル部と、前記本体部のX軸及びY軸方向の動きに応じて該コイル部に対して相対的に変位する磁気応答部材とを含み、該本体部のX軸及びY軸方向の動きに応じた検出信号を該コイル部から出力するものである請求項1又は2に記載の3次元操作検出装置。
- 前記2次元傾斜検出手段は、コイル部と、所定の収納空間内に移動自在に収納され、前記本体部のX軸及びY軸方向の一方の動きに応じて該収納空間内を動くことにより該コイル部に対して相対的に変位する磁気応答部材とを含む検出装置を2個直交させて設け、該検出装置によって前記本体部のX軸及びY軸方向の傾きを検出することに基づきX軸及びY軸方向の操作検出信号を出力するものである請求項1又は2に記載の3次元操作検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP29117096A JP4623765B2 (ja) | 1996-02-15 | 1996-10-13 | 3次元操作検出装置 |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP5391496 | 1996-02-15 | ||
| JP8-53914 | 1996-02-15 | ||
| JP8761396 | 1996-03-16 | ||
| JP8-87613 | 1996-03-16 | ||
| JP29117096A JP4623765B2 (ja) | 1996-02-15 | 1996-10-13 | 3次元操作検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH09311762A JPH09311762A (ja) | 1997-12-02 |
| JP4623765B2 true JP4623765B2 (ja) | 2011-02-02 |
Family
ID=27295108
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP29117096A Expired - Lifetime JP4623765B2 (ja) | 1996-02-15 | 1996-10-13 | 3次元操作検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4623765B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6148669A (en) * | 1998-06-29 | 2000-11-21 | U.S. Philips Corporation | Acceleration sensor with a spherical inductance influencing member |
| JP3957505B2 (ja) * | 2001-12-26 | 2007-08-15 | 株式会社ワコム | 3次元情報検出装置、3次元情報センサ装置 |
| CN101611368B (zh) * | 2007-02-20 | 2012-06-27 | 索尼计算机娱乐公司 | 操作装置和信息处理系统、信息处理方法 |
| CN103712649B (zh) * | 2013-12-09 | 2016-02-24 | 合肥工业大学 | 直管式倾斜与振动传感器及其使用方法 |
| CN116888434A (zh) * | 2021-03-01 | 2023-10-13 | 村田机械株式会社 | 位移检测装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS546421Y1 (ja) * | 1969-04-23 | 1979-03-26 | ||
| JPS5937515U (ja) * | 1982-09-03 | 1984-03-09 | オムロン株式会社 | 傾斜角検出センサ |
| JPS61207915A (ja) * | 1985-03-11 | 1986-09-16 | Hideo Oka | 磁性流体と開磁路磁心による傾斜センサ |
| JPH0726649Y2 (ja) * | 1986-08-21 | 1995-06-14 | 株式会社ソキア | 磁性流体を用いた傾斜センサ |
| JPH01291316A (ja) * | 1988-05-18 | 1989-11-22 | Matsushita Electric Ind Co Ltd | 3次元移動量指示装置 |
| JPH04151719A (ja) * | 1990-10-15 | 1992-05-25 | Mitsubishi Electric Corp | ポインティング・デバイス |
| JPH0623148A (ja) * | 1992-02-24 | 1994-02-01 | Shinichi Tsubota | ゲーム制御装置 |
| JPH0783660A (ja) * | 1993-09-13 | 1995-03-28 | Mitsubishi Heavy Ind Ltd | 姿勢角センサ |
| JPH08106355A (ja) * | 1994-10-04 | 1996-04-23 | Fujitsu Ltd | 座標入力装置 |
-
1996
- 1996-10-13 JP JP29117096A patent/JP4623765B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JPH09311762A (ja) | 1997-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3179330B1 (en) | Magnetic sensing user interface device | |
| US4584577A (en) | Angular position sensor | |
| AU748524B2 (en) | Position detector | |
| JP3596850B2 (ja) | マルチタップ受信器捲線を有する誘導性位置トランスデューサ及び相対位置を判別するための方法 | |
| EP0444796A1 (en) | Potentiometric circuit arrangement | |
| JP2019525335A (ja) | 空間内で物体を位置決めする装置 | |
| JP4623765B2 (ja) | 3次元操作検出装置 | |
| US7061469B2 (en) | Method of data input into a computer | |
| JP3742844B2 (ja) | 傾斜又は振動又は加速度の検出装置 | |
| JP3760191B2 (ja) | 球体センサ | |
| JPH10160460A (ja) | 傾斜検出装置 | |
| JP4047947B2 (ja) | 誘導型直線位置検出装置 | |
| JP4441593B2 (ja) | 荷重計 | |
| JP3733397B2 (ja) | 多方向傾斜検出装置 | |
| JP3733400B2 (ja) | 傾斜計 | |
| JP3733399B2 (ja) | 傾斜検出装置 | |
| JP3920394B2 (ja) | シリンダ位置検出装置 | |
| JP3920896B2 (ja) | リニア位置検出装置 | |
| JP4048207B2 (ja) | 位置検出装置 | |
| CN115698896A (zh) | 无源触觉装置 | |
| JP3749955B2 (ja) | 誘導型2次元位置検出装置 | |
| JP2001082914A (ja) | 角度検出装置 | |
| JP4125059B2 (ja) | 多軸傾斜検出装置 | |
| JP4124256B2 (ja) | 直線位置検出装置 | |
| JP4185170B2 (ja) | 圧力計 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060627 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20060825 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070508 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070709 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070920 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071206 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20071211 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20080104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100712 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100901 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101102 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131112 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |