JP4702086B2 - 車両用運転支援装置 - Google Patents
車両用運転支援装置 Download PDFInfo
- Publication number
- JP4702086B2 JP4702086B2 JP2006038098A JP2006038098A JP4702086B2 JP 4702086 B2 JP4702086 B2 JP 4702086B2 JP 2006038098 A JP2006038098 A JP 2006038098A JP 2006038098 A JP2006038098 A JP 2006038098A JP 4702086 B2 JP4702086 B2 JP 4702086B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- deceleration
- point
- brake
- vehicle speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/14—Dynamic electric regenerative braking for vehicles propelled by AC motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L1/00—Supplying electric power to auxiliary equipment of vehicles
- B60L1/02—Supplying electric power to auxiliary equipment of vehicles to electric heating circuits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/15—Preventing overcharging
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/16—Driver interactions by display
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Regulating Braking Force (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
車両の位置を検出する位置検出手段と、
要減速地点の地図情報を記憶する記憶手段と、
前記位置検出手段により検出された車両位置に基づき進行方向に位置する要減速地点の地図情報を前記記憶手段から抽出する抽出手段と、
前記抽出手段によって抽出された要減速地点の地図情報に基づいて、その要減速地点における目標車速を設定する目標車速設定手段と、
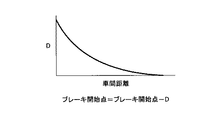
現在車速から前記目標車速設定手段によって設定された目標車速まで回生ブレーキで減速する場合に必要な減速距離を算出する減速距離算出手段と、
前記抽出手段によって地図情報が抽出された要減速地点と前記減速距離算出手段によって算出された減速距離とに基づいてブレーキ操作の開始が必要なブレーキ開始点を案内する案内手段を備える、車両用運転支援装置を提供する。
[数1]
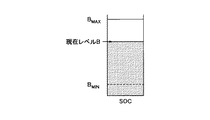
△B=0.5×M×(V2−Vmin2)×σ[J]
=2.78×10−7×0.5×M×(V2−Vmin2)×σ[kWh]
=Σ×(V2−Vmin2)[kWh]
と演算できる。なお、Mは車両重量[kg]、σはエネルギー回生効率[%]、Σは定数(=2.78×10−7×0.5×M×σ)である。つまり、△Bは車速Vを変数とする2次関数で定義することができる。もちろん、車速以外の走行状態の情報を反映した補正を行ってもよい。
[数2]
△V/△T=Win/(M×V)
なお、△Vは1秒間で走行する距離[m/s]、△Tは制御周期[s]、Winは電池受け入れ可能パワー[W]、Mは車両重量[kg]、Vは現状の実車速[m/s]である。
[数3]
Win=Pbr×(モータ効率)
として、減速パワーPbrと電池受け入れ可能パワーWinを等しいと考える。なお、以下、モータ効率は、一般に90%以上あるので、簡単化のため100%(=1)と仮定する。
[数4]
Pbr=Fbr×V
と表すことができる。また、慣性の法則に従い、車両重量M[kg]、減速加速度α[m/s2]とすると、減速力Fbrは、
[数5]
Fbr=M×α
と表すことができる。ここで、
[数6]
α=δV/δt:(Vは速度)
≒△V/△T:(△Tが小さいとき)
と考えることができるので、[数5]は、
[数7]
Fbr=M×(△V/△T)
と変形することができる。
[数8]
Fbr=M×(△V/△T)−M×g×sinθ
=M×(△V/△T−g×sinθ)
と表すことができる。
[数9]
Win=Pbr=M×(△V/△T−g×sinθ)×V
と表すことができる。
7 ナビゲーション装置
10 ECU
11 メモリ
20 エンジン
22 動力分割機構
24 ジェネレータ
26 インバータ
28 バッテリ
30 モータ
32 ディファレンシャル
40 案内装置
Claims (7)
- 車両の位置を検出する位置検出手段と、
要減速地点の地図情報を記憶する記憶手段と、
前記位置検出手段により検出された車両位置に基づき進行方向に位置する要減速地点の地図情報を前記記憶手段から抽出する抽出手段と、
前記抽出手段によって抽出された要減速地点の地図情報に基づいて、その要減速地点における目標車速を設定する目標車速設定手段と、
現在車速から前記目標車速設定手段によって設定された目標車速まで回生ブレーキで減速する場合に必要な減速距離を算出する減速距離算出手段と、
前記抽出手段によって地図情報が抽出された要減速地点と前記減速距離算出手段によって算出された減速距離とに基づいて、ブレーキ操作の開始が必要なブレーキ開始点を、該ブレーキ開始点に前記車両が到達する前に案内する案内手段を備える、車両用運転支援装置。 - 前記ブレーキ開始点は、前記抽出手段によって地図情報が抽出された要減速地点から前記減速距離算出手段によって算出された減速距離分手前に位置する地点である、請求項1記載の車両用運転支援装置。
- 前記案内手段は、前記抽出手段によって地図情報が抽出された要減速地点から前記減速距離算出手段によって算出された減速距離分手前に位置する地点に車両が到達した場合にブレーキ操作の案内を開始する、請求項1記載の車両用運転支援装置。
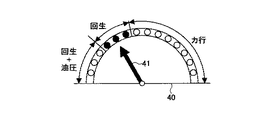
- 前記案内手段は、ドライバーのブレーキ操作量を案内する、請求項1記載の車両用運転支援装置。
- 前記案内手段は、前記ブレーキ操作量を視覚的に案内する表示手段である、請求項4記載の車両用運転支援装置。
- 前記減速距離算出手段によって算出された減速距離は、前記車両の走行状態に基づいて補正される、請求項1記載の車両用運転支援装置。
- 前記走行状態は、周辺車両の状態や天候状態である、請求項6記載の車両用運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006038098A JP4702086B2 (ja) | 2006-02-15 | 2006-02-15 | 車両用運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006038098A JP4702086B2 (ja) | 2006-02-15 | 2006-02-15 | 車両用運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007221889A JP2007221889A (ja) | 2007-08-30 |
| JP4702086B2 true JP4702086B2 (ja) | 2011-06-15 |
Family
ID=38498529
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006038098A Expired - Fee Related JP4702086B2 (ja) | 2006-02-15 | 2006-02-15 | 車両用運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4702086B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3828048A1 (en) | 2019-11-12 | 2021-06-02 | Toyota Jidosha Kabushiki Kaisha | Travel control device, travel control method, and non-transitory storage medium |
| EP3835156A1 (en) | 2019-12-11 | 2021-06-16 | Toyota Jidosha Kabushiki Kaisha | Travel control device, travel control method, non-transitory storage medium, and vehicle |
| DE102021125957A1 (de) | 2020-10-23 | 2022-04-28 | Toyota Jidosha Kabushiki Kaisha | Antriebssteuervorrichtung, verfahren und nicht-transitorisches speichermedium |
| DE102021129708A1 (de) | 2020-11-17 | 2022-05-19 | Toyota Jidosha Kabushiki Kaisha | Fahrsteuervorrichtung, Fahrsteuerverfahren und nichtflüchtiges Speichermedium |
| DE102022106658A1 (de) | 2021-03-26 | 2022-09-29 | Toyota Jidosha Kabushiki Kaisha | Antriebssteuervorrichtung, antriebssteuerverfahren und nicht-transitorisches speichermedium |
| EP3576976B1 (en) * | 2017-02-03 | 2024-01-24 | Bentley Motors Limited | Regenerative braking system |
| US12319268B2 (en) | 2022-03-02 | 2025-06-03 | Toyota Jidosha Kabushiki Kaisha | Traveling control device for vehicle, traveling control method, and storage medium |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE531922C2 (sv) * | 2008-01-28 | 2009-09-08 | Scania Cv Abp | Metod, system och datorprogram för automatisk has tighetsreglering av ett motorfordon |
| JP4985440B2 (ja) * | 2008-02-01 | 2012-07-25 | 株式会社デンソー | 回生制動状態報知装置 |
| JP4914868B2 (ja) * | 2008-04-22 | 2012-04-11 | 本田技研工業株式会社 | 電動車両の制御装置 |
| JP5262692B2 (ja) * | 2008-12-25 | 2013-08-14 | 日産自動車株式会社 | 車両のブレーキ操作の評価装置、車両のブレーキ操作の評価方法、ブレーキ制御装置及びバッテリ制御装置 |
| US8190325B2 (en) * | 2009-02-19 | 2012-05-29 | Ford Global Technologies, Llc | System and method for displaying an instantaneous fuel economy of a vehicle |
| JP4807421B2 (ja) | 2009-03-04 | 2011-11-02 | 株式会社デンソー | 車載用報知装置 |
| JP2011024353A (ja) | 2009-07-16 | 2011-02-03 | Aisin Aw Co Ltd | 案内装置、案内方法、及び案内プログラム |
| JP5521526B2 (ja) * | 2009-12-16 | 2014-06-18 | アイシン・エィ・ダブリュ株式会社 | 運転支援装置、方法およびプログラム |
| JP2011130547A (ja) | 2009-12-16 | 2011-06-30 | Aisin Aw Co Ltd | 運転支援装置、方法およびプログラム |
| WO2011096068A1 (ja) * | 2010-02-05 | 2011-08-11 | パイオニア株式会社 | 運転操作支援システム及び運転操作支援方法 |
| SE535806C2 (sv) * | 2010-04-12 | 2012-12-27 | Scania Cv Ab | Hybridfordon, och metod för ett hybridfordon |
| DE102010031540A1 (de) * | 2010-07-20 | 2012-01-26 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Fahrzeuges, welches mindestens eine elektrische Maschine umfasst |
| JP2012034501A (ja) | 2010-07-30 | 2012-02-16 | Aisin Aw Co Ltd | 運転支援装置、運転支援方法、及び運転支援プログラム |
| JP5454689B2 (ja) * | 2010-08-02 | 2014-03-26 | トヨタ自動車株式会社 | 車両用情報処理装置 |
| JP2012117938A (ja) * | 2010-12-01 | 2012-06-21 | Toyota Motor Corp | 車両用情報処理装置 |
| JP5360235B2 (ja) * | 2010-12-02 | 2013-12-04 | トヨタ自動車株式会社 | 車両制御装置 |
| EP2476596A1 (en) * | 2011-01-12 | 2012-07-18 | Harman Becker Automotive Systems GmbH | Energy efficient driving assistance |
| JP5652214B2 (ja) * | 2011-01-14 | 2015-01-14 | 株式会社デンソー | 運転支援装置 |
| SE535591C2 (sv) * | 2011-02-03 | 2012-10-09 | Scania Cv Ab | Metod för bestämning av en bromsposition för en regenerativ inbromsning av ett fordon, en anordning, ett bromssystem och ett fordon |
| JP5704229B2 (ja) | 2011-03-18 | 2015-04-22 | トヨタ自動車株式会社 | 運転支援装置及び車両用情報処理装置 |
| WO2013030927A1 (ja) | 2011-08-29 | 2013-03-07 | トヨタ自動車 株式会社 | 車両用情報処理装置及び車両用情報処理方法 |
| FR2996703B1 (fr) * | 2012-10-10 | 2015-03-20 | Renault Sas | Procede de recuperation d'energie electrique avec lissage de tension sur un reseau electrique embarque |
| US9026348B2 (en) | 2012-12-21 | 2015-05-05 | Honda Motor Co., Ltd. | System and method for brake coaching |
| JP5900448B2 (ja) * | 2013-09-30 | 2016-04-06 | トヨタ自動車株式会社 | 運転支援装置 |
| JP2015154602A (ja) * | 2014-02-14 | 2015-08-24 | トヨタ自動車株式会社 | 運転支援装置及び運転支援方法 |
| JP2016001970A (ja) * | 2014-06-12 | 2016-01-07 | 三菱自動車工業株式会社 | 車載電池の充放電表示装置 |
| JP6191570B2 (ja) | 2014-09-25 | 2017-09-06 | トヨタ自動車株式会社 | 車両の制御装置 |
| GB2539676B (en) | 2015-06-23 | 2020-11-25 | Bentley Motors Ltd | A method of controlling speed of a vehicle |
| JP6330791B2 (ja) | 2015-11-19 | 2018-05-30 | トヨタ自動車株式会社 | 車両制御装置 |
| DE102016218070B4 (de) * | 2016-09-21 | 2024-09-26 | Vitesco Technologies GmbH | Bestimmung des optimalen Beginns der Verzögerungsphase im Backend |
| CN112297850B (zh) * | 2020-10-23 | 2021-11-30 | 东风汽车股份有限公司 | 一种电机控制器失效模式下削弱冲击电流的方法 |
| CN112903305B (zh) * | 2020-12-31 | 2023-04-25 | 中汽院(重庆)汽车检测有限公司 | 一种汽车紧急避障能力测试评价方法 |
| JP7647677B2 (ja) * | 2022-05-20 | 2025-03-18 | トヨタ自動車株式会社 | 運転支援システム |
| EP4656439A1 (en) * | 2023-03-28 | 2025-12-03 | Hitachi Construction Machinery Co., Ltd. | Work vehicle |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3503318B2 (ja) * | 1995-12-15 | 2004-03-02 | 株式会社エクォス・リサーチ | 車両制御装置 |
| JP3627499B2 (ja) * | 1998-02-10 | 2005-03-09 | 日産自動車株式会社 | 車両制御装置 |
| JP3863672B2 (ja) * | 1998-08-18 | 2006-12-27 | 本田技研工業株式会社 | 車両用走行制御装置 |
| JP2005165423A (ja) * | 2003-11-28 | 2005-06-23 | Denso Corp | 車両運転支援装置 |
-
2006
- 2006-02-15 JP JP2006038098A patent/JP4702086B2/ja not_active Expired - Fee Related
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3576976B1 (en) * | 2017-02-03 | 2024-01-24 | Bentley Motors Limited | Regenerative braking system |
| EP3828048A1 (en) | 2019-11-12 | 2021-06-02 | Toyota Jidosha Kabushiki Kaisha | Travel control device, travel control method, and non-transitory storage medium |
| EP3835156A1 (en) | 2019-12-11 | 2021-06-16 | Toyota Jidosha Kabushiki Kaisha | Travel control device, travel control method, non-transitory storage medium, and vehicle |
| US11807214B2 (en) | 2019-12-11 | 2023-11-07 | Toyota Jidosha Kabushiki Kaisha | Travel control device, travel control method, non-transitory storage medium, and vehicle for deciding a power source for traveling based on a predicted amount of regenerative energy and thermal information |
| DE102021125957A1 (de) | 2020-10-23 | 2022-04-28 | Toyota Jidosha Kabushiki Kaisha | Antriebssteuervorrichtung, verfahren und nicht-transitorisches speichermedium |
| US11820354B2 (en) | 2020-10-23 | 2023-11-21 | Toyota Jidosha Kabushiki Kaisha | Driving control device, method, and non-transitory storage medium |
| US12304452B2 (en) | 2020-10-23 | 2025-05-20 | Toyota Jidosha Kabushiki Kaisha | Driving control device, method, and non-transitory storage medium |
| DE102021129708A1 (de) | 2020-11-17 | 2022-05-19 | Toyota Jidosha Kabushiki Kaisha | Fahrsteuervorrichtung, Fahrsteuerverfahren und nichtflüchtiges Speichermedium |
| US11780441B2 (en) | 2020-11-17 | 2023-10-10 | Toyota Jidosha Kabushiki Kaisha | Traveling control apparatus, traveling control method, and non-transitory storage medium |
| DE102022106658A1 (de) | 2021-03-26 | 2022-09-29 | Toyota Jidosha Kabushiki Kaisha | Antriebssteuervorrichtung, antriebssteuerverfahren und nicht-transitorisches speichermedium |
| US11975706B2 (en) | 2021-03-26 | 2024-05-07 | Toyota Jidosha Kabushiki Kaisha | Driving control device, driving control method, and non-transitory storage medium |
| US12319268B2 (en) | 2022-03-02 | 2025-06-03 | Toyota Jidosha Kabushiki Kaisha | Traveling control device for vehicle, traveling control method, and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007221889A (ja) | 2007-08-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4702086B2 (ja) | 車両用運転支援装置 | |
| US12017648B2 (en) | Vehicle control device | |
| US11254313B2 (en) | Travelling control apparatus | |
| JP6293197B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| JP6275187B2 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| CN105711593B (zh) | 驾驶辅助设备 | |
| JP5846214B2 (ja) | 運転支援装置 | |
| CN109383505B (zh) | 用于确定车辆的高效驾驶速度的系统和方法 | |
| JP5429197B2 (ja) | 車両制御装置 | |
| US9437110B2 (en) | Drive assisting apparatus | |
| US20170015328A1 (en) | Drive assist apparatus and method | |
| JP7059652B2 (ja) | 車両制御システム | |
| CN118695961A (zh) | 使用分段路线优化控制交通工具能耗的系统和方法 | |
| JP7234562B2 (ja) | ハイブリッド車両の制御方法及び制御装置 | |
| JP2011063186A (ja) | 車両駆動制御装置 | |
| US11801868B2 (en) | Hybrid vehicle, control method therefor, and storage medium | |
| JP2010132241A (ja) | 走行支援装置、走行支援方法及びコンピュータプログラム | |
| JP5835126B2 (ja) | 運転支援装置 | |
| US20230036756A1 (en) | Travel support control device for hybrid vehicle | |
| CN118618417A (zh) | 一种自动驾驶安全防护方法和系统 | |
| JP2009012495A (ja) | 車両用駆動力制御装置 | |
| JP2007168743A (ja) | ハイブリッド車両の駆動制御装置 | |
| JP6040792B2 (ja) | 走行制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090121 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110221 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4702086 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |