JP7647677B2 - 運転支援システム - Google Patents
運転支援システム Download PDFInfo
- Publication number
- JP7647677B2 JP7647677B2 JP2022083009A JP2022083009A JP7647677B2 JP 7647677 B2 JP7647677 B2 JP 7647677B2 JP 2022083009 A JP2022083009 A JP 2022083009A JP 2022083009 A JP2022083009 A JP 2022083009A JP 7647677 B2 JP7647677 B2 JP 7647677B2
- Authority
- JP
- Japan
- Prior art keywords
- target
- vehicle speed
- driving
- notification
- brake
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/58—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration responsive to speed and another condition or to plural speed conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/045—Improving turning performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Human Computer Interaction (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Traffic Control Systems (AREA)
Description
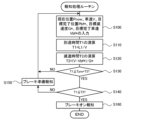
所定走行コースを走行する車両の運転を支援する運転支援システムであって、
車室内に情報を報知する報知装置と、
前記所定走行コースを走行する際の目標走行パターンにおいて前記所定走行コースのコーナーの手前でブレーキのオン操作を完了する位置としての目標完了位置と、前記目標走行パターンにおける前記目標完了位置での車速としての目標完了車速と、前記目標走行パターンにおける前記目標完了位置での減速度としての目標減速度と、前記車両の車速と、に基づいて、前記目標減速度で前記目標完了位置まで減速すると共に前記目標完了位置での前記車速が前記目標完了車速となるように前記ブレーキの前記オン操作を開始する開始タイミングを設定し、設定した前記開始タイミングで、前記報知装置が前記ブレーキの前記オン操作を促す報知であるブレーキオン報知を行なうよう前記報知装置を制御する制御装置と、
を備えることを要旨とする。
Claims (3)
- 所定走行コースを走行する車両の運転を支援する運転支援システムであって、
車室内に情報を報知する報知装置と、
前記所定走行コースを走行する際の目標走行パターンにおいて前記所定走行コースのコーナーの手前でブレーキのオン操作を完了する位置としての目標完了位置と、前記目標走行パターンにおける前記目標完了位置での車速としての目標完了車速と、前記目標走行パターンにおける前記目標完了位置での減速度としての目標減速度と、前記車両の車速と、に基づいて、前記目標減速度で前記目標完了位置まで減速すると共に前記目標完了位置での前記車速が前記目標完了車速となるように前記ブレーキの前記オン操作を開始する開始タイミングを設定し、設定した前記開始タイミングで、前記報知装置が前記ブレーキの前記オン操作を促す報知であるブレーキオン報知を行なうよう前記報知装置を制御する制御装置と、
を備え、
前記開始タイミングは、前記車両が現在位置から前記車速を維持して走行して前記目標完了位置に到達するまでに要する時間としての到達時間が、現在位置から前記目標減速度で減速したときに前記車速が前記目標完了車速となるのに要する時間としての減速時間になるタイミングである
運転支援システム。 - 所定走行コースを走行する車両の運転を支援する運転支援システムであって、
車室内に情報を報知する報知装置と、
前記所定走行コースを走行する際の目標走行パターンにおいて前記所定走行コースのコーナーの手前でブレーキのオン操作を完了する位置としての目標完了位置と、前記目標走行パターンにおける前記目標完了位置での車速としての目標完了車速と、前記目標走行パターンにおける前記目標完了位置での減速度としての目標減速度と、前記車両の車速と、に基づいて、前記目標減速度で前記目標完了位置まで減速すると共に前記目標完了位置での前記車速が前記目標完了車速となるように前記ブレーキの前記オン操作を開始する開始タイミングを設定し、設定した前記開始タイミングで、前記報知装置が前記ブレーキの前記オン操作を促す報知であるブレーキオン報知を行なうよう前記報知装置を制御する制御装置と、
を備え、
前記制御装置は、前記開始タイミングより所定時間前に、前記ブレーキの前記オン操作の準備を促す報知であるブレーキ準備報知を行なうよう前記報知装置を制御し、
前記開始タイミングは、前記車両が現在位置から前記車速を維持して走行して前記目標完了位置に到達するまでに要する時間としての到達時間が、現在位置から前記目標減速度で減速したときに前記車速が前記目標完了車速となるのに要する時間としての減速時間になるタイミングであり、
前記開始タイミングより前記所定時間前のタイミングは、前記到達時間が、前記減速時間に前記所定時間を加えた時間になるタイミングである
運転支援システム。 - 請求項2記載の運転支援システムであって、
前記報知装置は、情報を視認可能に表示する表示装置と、情報を音声により出力する音声出力装置と、を有し
前記制御装置は、前記表示装置および前記音声出力装置のうちの一方の装置が前記ブレーキオン報知を行なうように前記一方の装置を制御し、前記表示装置および前記音声出力装置のうちの他方の装置が前記ブレーキ準備報知を行なうように前記他方の装置を制御する
運転支援システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022083009A JP7647677B2 (ja) | 2022-05-20 | 2022-05-20 | 運転支援システム |
| CN202310194179.8A CN117087537A (zh) | 2022-05-20 | 2023-02-24 | 驾驶支援系统 |
| US18/117,762 US12202509B2 (en) | 2022-05-20 | 2023-03-06 | Driving assistance system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022083009A JP7647677B2 (ja) | 2022-05-20 | 2022-05-20 | 運転支援システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023170911A JP2023170911A (ja) | 2023-12-01 |
| JP7647677B2 true JP7647677B2 (ja) | 2025-03-18 |
Family
ID=88768719
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022083009A Active JP7647677B2 (ja) | 2022-05-20 | 2022-05-20 | 運転支援システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12202509B2 (ja) |
| JP (1) | JP7647677B2 (ja) |
| CN (1) | CN117087537A (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002264748A (ja) | 2001-03-05 | 2002-09-18 | Natl Inst For Land & Infrastructure Management Mlit | ブレーキ操作量及びタイミングの提供方法 |
| JP2011024353A (ja) | 2009-07-16 | 2011-02-03 | Aisin Aw Co Ltd | 案内装置、案内方法、及び案内プログラム |
| JP2019088114A (ja) | 2017-11-07 | 2019-06-06 | 三菱自動車工業株式会社 | 車両運転支援装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001010373A (ja) * | 1999-07-01 | 2001-01-16 | Hitachi Ltd | 自動車の走行制御装置 |
| JP2003076260A (ja) | 2001-09-06 | 2003-03-14 | Suzuki Motor Corp | 運転技能修得装置 |
| JP4702086B2 (ja) * | 2006-02-15 | 2011-06-15 | トヨタ自動車株式会社 | 車両用運転支援装置 |
| WO2013072995A1 (ja) * | 2011-11-14 | 2013-05-23 | トヨタ自動車株式会社 | 運転支援装置 |
| US9725089B2 (en) * | 2013-04-30 | 2017-08-08 | Nissan Motor Co., Ltd. | Vehicle control device and vehicle control method |
| JP6347262B2 (ja) * | 2016-02-12 | 2018-06-27 | マツダ株式会社 | 車両の制御装置 |
| US10347129B2 (en) * | 2016-12-07 | 2019-07-09 | Magna Electronics Inc. | Vehicle system with truck turn alert |
| CN112292718B (zh) * | 2018-07-12 | 2023-06-06 | 威伯科有限公司 | 用于转向辅助功能的信息、警告和制动请求生成 |
| US20220292749A1 (en) * | 2019-09-11 | 2022-09-15 | 3M Innovative Properties Company | Scene content and attention system |
| KR20210069177A (ko) * | 2019-12-02 | 2021-06-11 | 현대자동차주식회사 | 차량 및 차량의 제어방법 |
| US12145573B2 (en) * | 2021-01-11 | 2024-11-19 | Ford Global Technologies, Llc | System and method for vehicle turning radius reduction |
| US12005918B2 (en) * | 2021-09-01 | 2024-06-11 | Wipro Limited | System and method for providing assistance to vehicle occupants |
-
2022
- 2022-05-20 JP JP2022083009A patent/JP7647677B2/ja active Active
-
2023
- 2023-02-24 CN CN202310194179.8A patent/CN117087537A/zh active Pending
- 2023-03-06 US US18/117,762 patent/US12202509B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002264748A (ja) | 2001-03-05 | 2002-09-18 | Natl Inst For Land & Infrastructure Management Mlit | ブレーキ操作量及びタイミングの提供方法 |
| JP2011024353A (ja) | 2009-07-16 | 2011-02-03 | Aisin Aw Co Ltd | 案内装置、案内方法、及び案内プログラム |
| JP2019088114A (ja) | 2017-11-07 | 2019-06-06 | 三菱自動車工業株式会社 | 車両運転支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN117087537A (zh) | 2023-11-21 |
| US12202509B2 (en) | 2025-01-21 |
| US20230373507A1 (en) | 2023-11-23 |
| JP2023170911A (ja) | 2023-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6418634B2 (ja) | 運転支援制御装置 | |
| CN113165666B (zh) | 用于改善机动车的能效的方法、机动车和计算机可读介质 | |
| EP2748805B1 (en) | Drive support device and drive support method | |
| JP6292200B2 (ja) | 車両の自動減速制御装置 | |
| CN111619573B (zh) | 车辆控制装置 | |
| EP3778327B1 (en) | Method and device for controlling autonomous driving vehicle | |
| WO2016039427A1 (ja) | 駐車支援装置 | |
| JP2014041556A (ja) | 運転支援装置 | |
| EP3002655B1 (en) | Assistance control system for vehicle driving operation | |
| JP2012250673A (ja) | 車両用加速抑制装置及び車両用加速抑制方法 | |
| JP2016199104A (ja) | 車両の制御装置 | |
| JP5614079B2 (ja) | 運転支援装置 | |
| US20210300307A1 (en) | Vehicle and control apparatus thereof | |
| US12371051B2 (en) | Vehicle, control device and control method therefor, and storage medium | |
| US12337879B2 (en) | Control device for vehicle | |
| JP2020097355A (ja) | 安全運転レベル表示装置 | |
| JP7647677B2 (ja) | 運転支援システム | |
| JP7578086B2 (ja) | 車両支援サーバ及びプログラム | |
| CN118843571B (zh) | 车辆行驶控制方法及车辆行驶控制装置 | |
| US20230055862A1 (en) | Vehicle | |
| JP7683568B2 (ja) | 車両案内システム | |
| KR102275922B1 (ko) | 자동차 | |
| JP7385693B2 (ja) | 運転支援装置、車両、運転支援方法、およびプログラム | |
| JP2013049425A (ja) | 車両用加速抑制装置及び車両用加速抑制方法 | |
| JP2024077389A (ja) | 車両の運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241023 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250217 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7647677 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |