JP4982995B2 - 電動式ステアリング装置 - Google Patents
電動式ステアリング装置 Download PDFInfo
- Publication number
- JP4982995B2 JP4982995B2 JP2005296997A JP2005296997A JP4982995B2 JP 4982995 B2 JP4982995 B2 JP 4982995B2 JP 2005296997 A JP2005296997 A JP 2005296997A JP 2005296997 A JP2005296997 A JP 2005296997A JP 4982995 B2 JP4982995 B2 JP 4982995B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- tilt
- motor
- telescopic
- process proceeds
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Steering Controls (AREA)
Description
そこで、本発明は、上記従来例の未解決の課題に着目してなされたものであり、姿勢調整を行う制御範囲の設定を、送りねじの噛み込みや機構系の破損の原因となる大きな衝撃力を低減しながら行うことができる電動式ステアリング装置を提供することを目的としている。
さらに、請求項3に係る電動式ステアリング装置は、請求項1又は2に係る発明において、前記上死点位置検出手段は、姿勢調整機構の移動速度を検出し、当該移動速度が所定速度以下に低下したときに前記メカニカルストッパに当接したことを検出するように構成されていることを特徴としている。
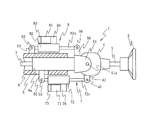
図1は、本発明の一実施形態を示す電動式ステアリング装置の概略構成図である。この電動式ステアリング装置1は、いわゆる首振りチルト方式を採用しており、ステアリングホイール2から延びてステアリングギア(図示せず)に連結されたステアリングシャフト3をその軸の周りに回転可能に保持する三つのステアリングコラム、すなわち、アッパコラム4,ミドルコラム5,ロアコラム6を備えている。そして、各コラム4,5,6の相対位置を適宜調節することによって、ステアリングシャフト3、ひいてはステアリングホイール2が所望の位置に保持される。
伸縮ロッド装置72から延びるアクチュエータロッド72aは、ブラシレスモータ71の回転に応じて伸縮する。
伸縮ロッド装置82の前端部は、ロアコラム6に固定されたブラケット62にピン63で枢着されており、ヒンジを構成している。アクチュエータロッド82aの後端部は、ミドルコラム5のフォーク部51に固定されたブラケット55にピン56で枢着されており、ヒンジを構成している。したがって、伸縮ロッド装置82からアクチュエータロッド82aを繰り出せば、ミドルコラム5がロアコラム6から繰り出されることになり、ステアリングホイール2を後退させることができる。一方、伸縮ロッド装置82内にアクチュエータロッド82aを収納すれば、ミドルコラム5がロアコラム6に繰り込まれることになり、ステアリングホイール2を前進させることができる。
ここで、ブラシレスモータ71及び81は、モータ駆動回路90A及び90Bを内蔵している。これらモータ駆動回路90A及び90Bは、図3に示すように、後述する制御装置100から入力されるスタート及びストップを表す信号ST/SPと、回転方向を指示する回転方向信号CW/CCWと、速度指令を表すパルス幅変調信号PWMと、ブラシレスモータ71及び81のロータ位置を検出する位置検出装置73及び83を構成する例えばホール素子でなる位置検出素子91u〜91wの出力を2値信号に変換するシュミットトリガ回路92u〜92wから入力される回転位置信号とが入力され、これらに基づいてブラシレスモータ71及び81を駆動する三相駆動信号を形成する三相分配回路93と、この三相分配回路93から出力される三相駆動信号と、後述するインバータ回路96の過電流を検出する過電流検出回路94からの過電流検出値信号SIとが入力されてインバータ回路96を構成する電界効果トランジスタQua〜Qwbのゲートを駆動するFETゲート駆動回路95と、一対の電界効果トランジスタ(FET)Qua,Qub、Qva,Qvb及びQwa,Qwbを直列に接続してブラシレスモータ71及び81の各相コイルLu、Lv及びLwに対応する3組のFET回路を並列に接続したインバータ回路96とを備えている。ここで、FETゲート駆動回路95は、過電流検出回路94から正常モータ電流状態を表す例えば論理値“0”の過電流検出信号SIが入力されているときには、三相分配回路93から入力される三相駆動信号に応じた回転方向及び回転速度ブラシレスモータ71及び81を駆動するようにインバータ回路96の各電界効果トランジスタQua〜Qwbのゲートにパルス幅変調信号PWMを供給するが、過電流検出回路94から過電流状態を表す例えば論理値“1”の過電流検出信号SIが入力されたときに、例えばインバータ回路96の下アームを構成する電界効果トランジスタQub、Qvb及びQwbのゲートに供給するPWM信号のデューティ比を0%に制御してブラシレスモータ71又は81の励磁コイルLu〜Lwへの通電を停止させる。
このモータ制御処理は、レギュレータ103から制御電圧Vcが供給開始されたときに実行開始され、先ず、ステップS1で、リレー回路108のリレーコイルLLRと接地との間に接続したスイッチング素子120をオン状態に制御する高レベルのリレー制御信号SLをスイッチング素子120に出力してからステップS2に移行する。
ここで、制御開始位置を設定するには、図8に示す制御開始位置設定処理を実行する。この制御開始位置設定処理は、先ず、ステップS61で、モータ駆動回路90Aに対して最小駆動速度VMINとなる最小デューティ比の速度指令PWMとチルトアップ側に移動させる例えば正転方向指令CWを出力し、次いでステップS62に移行して、モータ駆動回路90Aから入力される位置検出信号FG1及びFG2の何れか1つのパルスの立ち上がり時点から次のパルスの立ち上がり時点までの時間を計測するか又は単位時間当たりのパルス数を計測することにより駆動速度VTIを算出してからステップS63に移行する。
このステップS64では、モータ駆動回路90Aに対して最小駆動速度VMINよりは速いが比較的低い所定速度の速度指令PWMを出力すると共に、逆転方向指令CCWを出力し、次いでステップS65に移行して、位置検出信号FG1又はFG2のパルス数Npを計数し、次いでステップS66に移行して、計数したパルス数Npが予め設定した設定値Npsに達したか否かを判定し、Np<Npsであるときには前記ステップS65に戻り、Np=NpsとなったときにステップS67に移行する。
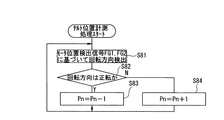
また、演算処理装置106では、図9に示すチルト位置計測処理を実行する。このチルト位置計測処理は、先ず、ステップS81で後述するようにモータ位置検出信号FG1及びFG2に基づいてブラシレスモータ71の回転方向を検出し、次いでステップS82に移行して、回転方向が正転方向であるか否かを判定し、正転方向であるときにはステップS83に移行して、モータ位置検出信号FG1が立ち上がる毎に位置計測値Pnをデクリメントしてから前記ステップS81に戻り、逆転方向であるときにはステップS84に移行してモータ位置検出信号FG2が立ち上がる毎に位置計測値Pnをインクリメントしてから前記ステップS81に戻る。
このテレスコピック機構8でも図示しないが図8と同様の電動テレスコ範囲設定処理を実行する。
ステップS27では、前記ステップS26と同様にリレー回路108をオフ状態とする低レベルのリレー制御信号SLをリレーコイルLLRと接地との間に介挿されたスイッチング素子120に出力して、このスイッチング素子120をオフ状態に制御してからステップS28に移行する。
このステップS31では、前述したステップS1と同様に、リレー回路108のリレーコイルLLRと接地との間に接続したスイッチング素子120をオン状態に制御する高レベルのリレー制御信号SLをスイッチング素子120に出力してからステップS32に移行する。
このステップS34では、現在のテレスコ位置は記憶装置107のテレスコ位置記憶領域に記憶されているテレスコ位置と一致するか否かを判定し、両者が一致しない場合には、ステップS35に移行して、現在のテレスコ子位置を記憶装置107のテレスコ位置記憶領域に更新記憶してからステップS36に移行し、両者が一致する場合には、そのままステップS36に移行する。
また、演算処理装置106では、図5に示す異常検出処理を所定時間(例えば10msec)毎のタイマ割込処理として実行する。この異常検出処理は、先ず、ステップS41で、モータ駆動回路90Aから出力されるモータ位置検出信号FG1,FG2を読込み、次いでステップS42に移行して、モータ駆動回路90Aに対する速度指令値PWMが“0”であるか否かを判定し、速度指令値PWMが“0”であるときにはステップS43に移行して、モータ駆動回路90Aから出力されるモータ位置検出信号FG1及びFG2の少なくとも一方に状態変化が生じたか否かを判定し、状態変化を生じたときには速度指令値PWMが“0”であり、モータ駆動回路90Aが駆動されていないにもかかわらずブラシレスモータ71が回転駆動しており、モータ駆動回路90Aに天絡等の異常が発生したものと判断してステップS44に移行して、異常判定フラグFAを“1”にセットし、状態変化を生じないときにはモータ駆動回路90Aが正常であるものと判断して後述するステップS49に移行する。
次いで、ステップS56に移行して、回転方向指令CW/CCWとステップS55で検出した回転方向検出値とが一致するか否かを判定し、両者が不一致であるときにはモータ駆動回路90Bが異常であると判断して前記ステップS52に移行し、両者が一致する場合にはモータ駆動回路90Bが正常であるものと判断して前記ステップS57に移行する。
今、生産工場で車両にチルト機構7及びテレスコピック機構8が組み付けられると共に、バッテリ101が搭載されて、このバッテリ101から制御装置100にバッテリ電圧VBが投入されると、レギュレータ103から制御電圧Vcが演算処理装置106に供給されることにより、この演算処理装置106で図4のモータ制御処理及び図5の異常検出処理が実行開始される。
このため、図4のモータ制御処理では、ステップS1で、高レベルのリレー制御信号SLをスイッチング素子120に出力することにより、リレーコイルLLRに通電してリレー接点tLRをオン状態とすることにより、ブラシレスモータ71及び81のモータ駆動回路90A及び90Bにバッテリ電圧VBを供給開始する。
そして、異常判定フラグFAが“0”にリセットされているので、ステップS2からステップS4に移行して、チルト機構7の制御開始位置を設定する制御開始位置設定処理を行う。
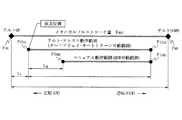
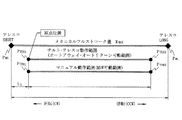
また、設定した位置計数値Pnuに電動チルト制御範囲のストロークに相当するパルス数を加算してチルトダウン側の位置計数値Pndを算出し、この位置計数値Pndを記憶装置107の電動チルト制御範囲記憶領域に記憶する。
このように、チルト機構7の電動チルト制御範囲及びテレスコピック機構8の電動テレスコ制御範囲を設定する場合に、ブラシレスモータ71及び81を最小駆動速度VMINで駆動しながらメカニカルストッパ側に正転駆動し、このときの移動速度が閾値以下に低下したときにメカニカルストッパに当接したものと判断し、ブラシレスモータ71及び81をチルト機構7の電動チルト制御範囲の退避側制御開始位置及びテレスコピック機構8の電動テレスコ制御範囲の退避側制御開始位置に移動させて、これら退避側制御開始位置を設定するので、チルト機構7及びテレスコピック機構8がメカニカルストッパに衝接することを確実に防止することができ、送りねじの噛み込みや機構系の破損を確実に防止することができる。しかも、メカニカルストッパへの当接をモータ駆動回路90A及び90Bから入力されるモータ位置検出信号FG1及びFG2に基づいて駆動速度を算出し、この駆動速度が閾値以下に減少したことを検出することにより、検出するようにしているので、別途速度検出手段を設ける必要がなく、部品点数を減少させて、全体の構成を簡易小型化することができる。
以上のように制御開始位置設定処理が終了すると、このときのイグニッションスイッチ111がオフ状態であるものとすると、ステップS6からステップS7を経てステップS8に移行し、低レベルのリレー制御信号SLをスイッチング素子120に出力することにより、スイッチング素子120をオフ状態とし、これによってリレー回路108をオフ状態としてブラシレスモータ71及び81のモータ駆動回路90A及び90Bへのバッテリ電圧VBの供給を停止し、ステップS6〜S8を繰り返すループ処理状態となる。
その後、運転者がチルト位置を調整したい場合には、マニュアルチルトスイッチ部ST1で好みのチルト位置を選択し、これに応じたスイッチ信号ST1が入力されると、入力されたスイッチ信号ST1に応じて逆転方向指令CCW及び速度指令PWMがモータ駆動回路90Aに出力されて、ブラシレスモータ71が例えば逆転されてステアリングホイール2が運転者の所望チルト位置まで下降される。
このように、運転者がマニュアルチルトスイッチ部115及びマニュアルテレスコスイッチ部116を操作することにより、ステアリングホイール2を運転者の所望位置に移動させることができる。
同様に、現在のテレスコ位置が記憶装置107のテレスコ位置記憶領域に記憶されているテレスコ位置と一致するか否かを判定し、テレスコ位置が記憶されていないので、現在のテレスコ位置がテレスコ位置記憶領域に記憶される(ステップS35)。
そして、モータ駆動回路90A及び90Bの何れかに異常が発生して、異常判定フラグFAが“1”にセットされると、前述した図4のモータ制御処理では、演算処理装置106に電源が投入された初期状態で、異常判定フラグFAが“1”にセットされているときには、ステップS2からステップS3に移行して、低レベルのリレー制御信号SLをスイッチング素子120に出力することにより、直ちにリレー回路108がオフ状態に制御されてモータ制御処理が終了される。このため、モータ駆動回路90A及び90Bに供給されるバッテリ電圧VBを確実に遮断するので、異常発生時にブラシレスモータ71及び81が駆動されることを確実に防止することができる。
また、上記実施形態においては、図4のモータ制御処理で、イグニッションスイッチ111がオフ状態を継続している状態ではステップS6〜S8で待ちループ処理を行う場合について説明したが、これに限定されるものではなく、前回の走行終了時にチルト機構7及びテレスコピック機構8を退避位置に移動させたときに、イグニッションスイッチ111の状態変化のみを監視する待機処理に移行し、イグニッションスイッチ111がオン状態となったときに図4の処理を復帰させるようにしてもよい。
なおさらに、上記実施形態においては、イグニッションスイッチ111がオン状態となったときに、チルト機構7及びテレスコピック機構8が記憶されたチルト位置及びテレスコ位置に制御される場合について説明したが、これに限定されるものではなく、ドアスイッチ114が開状態から閉状態となったとき即ち運転者が座席に着座してから運転席側のドアを締めたときに、チルト機構7及びテレスコピック機構8を記憶されたチルト位置及びテレスコ位置に移動させるようにしてもよい。
さらに、上記実施形態においては、1つのリレー回路108によってモータ駆動回路90A及び90Bへのバッテリ電圧VBの供給を遮断する場合について説明したが、これに限定されるものではなく、モータ駆動回路90A及び90Bに個別にリレー回路を設けて、異常となったモータ駆動回路に対してのみバッテリ電圧VBの供給を遮断するようにしてもよい。
また、上記実施形態においては、エンジン始動回数Nによって制御開始位置を設定するタイミングを設定する場合について説明したが、これに限定されるものではなく、キースイッチ113がオフ状態となったときのチルト機構7及びテレスコピック機構8の退避動作回数を計測して、その退避動作回数が所定値以上となったときに制御開始位置を設定するようにしてもよい。
さらにまた、上記実施形態においては、チルト機構7及びテレスコピック機構8の退避側制御開始位置を先に設定する場合について説明したが、これに限定されるものではなく、退避側とは反対側の制御開始位置を先に設定するようにしてもよい。
Claims (3)
- 後端側にステアリングホイールが装着されるステアリング機構と、該ステアリング機構の傾動位置及び伸縮位置の少なくとも一方を位置調整する電動モータを有する姿勢調整機構と、前記電動モータを駆動制御するモータ駆動回路と、前記モータ駆動回路に対して前記姿勢調整機構の姿勢調整を行う指令値を出力する制御部とを備えた電動式ステアリング装置であって、
前記制御部は、少なくとも前記制御部に最初に電源が投入されたとき並びに制御原点補正が必要なエンジン始動回数が設定値に達したとき及び前記姿勢制御機構の退避動作回数が所定値以上となったときの一方であるときに、前記姿勢調整機構の電動モータを位置調整可能な最小駆動デューティ制御を行ってメカニカルストッパに向けて駆動する最小駆動制御手段と、該最小駆動制御手段で姿勢調整機構が前記メカニカルストッパに当接したことを検出する上死点位置検出手段と、該上死点位置検出手段でメカニカルストッパへの当接を検出したときに、当該上死点位置から所定距離戻った所定制御範囲の制御開始位置まで前記姿勢調整機構を駆動する制御開始位置設定手段とを備えていることを特徴とする電動式ステアリング装置。 - 前記制御部は、前記制御開始位置設定手段で所定制御範囲の制御開始位置が設定されたときに、当該退避側制御開始位置に近づいたときに前記電動モータに対する速度指令を漸減するように構成されていることを特徴とする請求項1に記載の電動式ステアリング装置。
- 前記上死点位置検出手段は、姿勢調整機構の移動速度を検出し、当該移動速度が所定速度以下に低下したときに前記メカニカルストッパに当接したことを検出するように構成されていることを特徴とする請求項1又は2に記載の電動式ステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005296997A JP4982995B2 (ja) | 2005-10-11 | 2005-10-11 | 電動式ステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005296997A JP4982995B2 (ja) | 2005-10-11 | 2005-10-11 | 電動式ステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007106179A JP2007106179A (ja) | 2007-04-26 |
| JP4982995B2 true JP4982995B2 (ja) | 2012-07-25 |
Family
ID=38032399
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005296997A Expired - Fee Related JP4982995B2 (ja) | 2005-10-11 | 2005-10-11 | 電動式ステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4982995B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102452411A (zh) * | 2010-10-22 | 2012-05-16 | 比亚迪股份有限公司 | 一种方向盘自动调节装置 |
| JP5664214B2 (ja) | 2010-12-21 | 2015-02-04 | 株式会社ジェイテクト | 車両用操舵装置 |
| KR102532320B1 (ko) * | 2016-09-05 | 2023-05-16 | 현대자동차주식회사 | 차량의 이동형 전자장비 시스템 및 그 제어방법 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6167663A (ja) * | 1984-09-10 | 1986-04-07 | Aisin Seiki Co Ltd | 車上装備の姿勢設定装置 |
| JPH0794224B2 (ja) * | 1985-08-13 | 1995-10-11 | アイシン精機株式会社 | 車上装備の姿勢設定装置 |
| JPH0794223B2 (ja) * | 1985-08-13 | 1995-10-11 | アイシン精機株式会社 | 車上装備の姿勢設定装置 |
| JPH1170880A (ja) * | 1997-06-27 | 1999-03-16 | Aisin Seiki Co Ltd | ステアリング位置調整制御装置 |
| JP4304755B2 (ja) * | 1999-04-06 | 2009-07-29 | アイシン精機株式会社 | ステアリング位置調整制御装置 |
-
2005
- 2005-10-11 JP JP2005296997A patent/JP4982995B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007106179A (ja) | 2007-04-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5151128B2 (ja) | 電動式ステアリング装置 | |
| US5596253A (en) | Vehicle-mounted motor drive apparatus | |
| JP5614576B2 (ja) | 車両用操舵装置 | |
| US11338839B2 (en) | Electrically adjustable steering | |
| JP2006009526A (ja) | 開閉体の制御装置 | |
| US6972536B2 (en) | Closure member control device and method for limiting positional deviation of closure member | |
| JP4982995B2 (ja) | 電動式ステアリング装置 | |
| JP4882467B2 (ja) | 電動パワーステアリング制御装置 | |
| JP4973159B2 (ja) | 電動式ステアリング装置 | |
| JP7338572B2 (ja) | ステアリングホイール位置調整装置 | |
| US20070068727A1 (en) | Electric power steering control device | |
| JP2007106180A (ja) | 電動式ステアリング装置 | |
| JP5515851B2 (ja) | 電動式ステアリング位置調整装置及び車両 | |
| JP2007110788A (ja) | 電動式ステアリング装置 | |
| US20210363810A1 (en) | Vehicular opening/closing body control device | |
| JP7334674B2 (ja) | スイッチの駆動回路 | |
| JP4923506B2 (ja) | 電動式ステアリング装置 | |
| JP4802648B2 (ja) | 電動式ステアリング装置 | |
| WO2020184520A1 (ja) | 開閉体駆動機構 | |
| JP4876716B2 (ja) | 電動パワーステアリング制御装置 | |
| JPH10178800A (ja) | ステッピングモ−タ駆動装置 | |
| JP4166141B2 (ja) | 電動パワーステアリング装置 | |
| JP4910561B2 (ja) | 電動パワーステアリング装置 | |
| JP5721799B2 (ja) | 電動パワーステアリング装置 | |
| JP2002079884A (ja) | 電動格納ミラーの駆動方法および駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080917 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20090130 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20101022 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101022 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110111 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110301 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110712 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110907 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20111216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120327 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120409 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4982995 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150511 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |