JP6281445B2 - 液面検出装置 - Google Patents
液面検出装置 Download PDFInfo
- Publication number
- JP6281445B2 JP6281445B2 JP2014174440A JP2014174440A JP6281445B2 JP 6281445 B2 JP6281445 B2 JP 6281445B2 JP 2014174440 A JP2014174440 A JP 2014174440A JP 2014174440 A JP2014174440 A JP 2014174440A JP 6281445 B2 JP6281445 B2 JP 6281445B2
- Authority
- JP
- Japan
- Prior art keywords
- tan
- liquid level
- liquid
- wave
- surface portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Measurement Of Levels Of Liquids Or Fluent Solid Materials (AREA)
Description
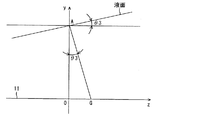
容器(10)の底面部(11)と所定の角度(θ1)をもって、底面部(11)の所定位置(O)から液面に向かう方向に、第1の波動を発射する第1発射部(110)と、
第1の波動とは逆の方向で、底面部(11)と所定の角度(θ1)をもって、所定位置(O)から液面に向かう方向に、第2の波動を発射する第2発射部(120)と、
底面部(11)に配置されて、液面で反射して底面部(11)に至る第1の波動の位置(C)、および液面で反射して底面部(11)に至る第2の波動の位置(F)を検知する検知部(130)と、
所定の角度(θ1)、第1の波動の位置(C)、および第2の波動の位置(F)を基にして、液面の位置(H)、および底面部(11)に対する液面の相対的な傾き(θ2、θ3)を算出する算出部(140)とを備えることを特徴としている。
第1実施形態の液面検出装置100について、図1〜図4を用いて説明する。液面検出装置100は、例えば、車両用の燃料タンク10内に貯留される燃料(例えば、ガソリン)の液面の位置を検出(算出)する装置である。燃料タンク10は本発明の容器に対応し、また、燃料は本発明の液体に対応する。
∠OAB=π/2−θ1、
∠BAD=θ2、
入射角度=反射角度の関係であることより、
∠OAD=∠DAC=(π/2−θ1)+θ2=π/2−θ1+θ2、
∠BAC=θ2+(π/2−θ1+θ2)=π/2−θ1+2・θ2、である。
(数1)
tanθ1=AB/OB となる。
OB=AB/tanθ1=(L+M)/tanθ1 となる。
(数2)
OB=(L+M)/tanθ1 となる。
(数3)
M=OB・tanθ2 となる。
OB=(L+M)/tanθ1=(L+OB・tanθ2)/tanθ1 となり、
OB・tanθ1=L+OB・tanθ2 となり、
OB(tanθ1−tanθ2)=L となる。
(数4)
OB=L/(tanθ1−tanθ2) となる。
AB=tanθ1・OB=tanθ1・L/(tanθ1−tanθ2) となる。
(数5)
AB=tanθ1・L/(tanθ1−tanθ2) となる。
(数6)
tan(∠BAC)=tan(π/2−θ1+2・θ2)=BC/AB となる。
BC=AB・tan(π/2−θ1+2・θ2)
={tanθ1・L/(tanθ1−tanθ2)}・tan(π/2−θ1+2・θ2) となる。
(数7)
BC={tanθ1・L/(tanθ1−tanθ2)}・tan(π/2−θ1+2・θ2) となる。
OC=OB+BC
=L/(tanθ1−tanθ2)+{tanθ1・L/(tanθ1−tanθ2)}・tan(π/2−θ1+2・θ2)
={L+L・tanθ1・tan(π/2−θ1+2・θ2)}/(tanθ1−tanθ2) となる。
(数8)
OC={L+L・tanθ1・tan(π/2−θ1+2・θ2)}/(tanθ1−tanθ2) となる。
(数9)
OF={L+L・tanθ1・tan(π/2−θ1−2・θ2)}/(tanθ1+tanθ2) となる。
OC/OF={L+L・tanθ1・tan(π/2−θ1+2・θ2)}
/(tanθ1−tanθ2)
/[{L+L・tanθ1・tan(π/2−θ1−2・θ2)}
/(tanθ1+tanθ2)]
=[(tanθ1+tanθ2)/(tanθ1−tanθ2)]
・[(1+tanθ1・tan(π/2−θ1+2・θ2)
/(1+tanθ1・tan(π/2−θ1−2・θ2)] となる。
(数10)
OC/OF=[(tanθ1+tanθ2)/(tanθ1−tanθ2)]
・[(1+tanθ1・tan(π/2−θ1+2・θ2)/
(1+tanθ1・tan(π/2−θ1−2・θ2)] となる。
(数11)
tanθ3=OG/OA となる。
OG=OA・tanθ3
=AB・tanθ3
={tanθ1・L/(tanθ1−tanθ2)}・tanθ3、となる。
(数12)
OG={tanθ1・L/(tanθ1−tanθ2)}・tanθ3 となる。
第2実施形態の液面検出装置100Aを図5に示す。第2実施形態は、上記第1実施形態における液面検出装置100に対して、警告部150を追加したものである。
上記第1、第2実施形態では、第1、第2発光素子110、120を用いて、第1、第2発射部から発射する波動を、光(レーザ光)とし、また、発射された光を検知する検知部として受光部130(光感素子131)を用いるものとした。しかしながら、これに限定されることなく、波動としては、音(例えば、超音波)を用いるものとしてもよい。この場合は、第1、第2発射部、および検知部として、音波振動子とすることで対応が可能である。
11 底面部
100、100A 液面検出装置
110 第1発光素子(第1発射部)
120 第2発光素子(第2発射部)
130 受光部(検知部)
140 算出部
150 警告部
Claims (4)
- 容器(10)内に貯留される液体の液面の位置(H)を検出する液面検出装置であって、
前記容器(10)の底面部(11)と所定の角度(θ1)をもって、前記底面部(11)の所定位置(O)から液面に向かう方向に、第1の波動を発射する第1発射部(110)と、
前記第1の波動とは逆の方向で、前記底面部(11)と前記所定の角度(θ1)をもって、前記所定位置(O)から液面に向かう方向に、第2の波動を発射する第2発射部(120)と、
前記底面部(11)に配置されて、前記液面で反射して前記底面部(11)に至る前記第1の波動の位置(C)、および前記液面で反射して前記底面部(11)に至る前記第2の波動の位置(F)を検知する検知部(130)と、
前記所定の角度(θ1)、前記第1の波動の位置(C)、および前記第2の波動の位置(F)を基にして、前記液面の位置(H)、および前記底面部(11)に対する前記液面の相対的な傾き(θ2、θ3)を算出する算出部(140)とを備えることを特徴とする液面検出装置。 - 前記第1の波動、および前記第2の波動は、光であることを特徴とする請求項1に記載の液面検出装置。
- 前記算出部(140)は、前記液面の位置(H)、前記液面の相対的な傾き(θ2、θ3)、および予め把握された前記容器(10)に関する形状特性を基にして、前記液体の体積を算出することを特徴とする請求項1または請求項2に記載の液面検出装置。
- 前記算出部(140)は、前記液体の体積が予め定めた所定体積を下回ると、使用者に対する警告を行う警告部(150)を作動させることを特徴とする請求項3に記載の液面検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014174440A JP6281445B2 (ja) | 2014-08-28 | 2014-08-28 | 液面検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014174440A JP6281445B2 (ja) | 2014-08-28 | 2014-08-28 | 液面検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016050781A JP2016050781A (ja) | 2016-04-11 |
| JP6281445B2 true JP6281445B2 (ja) | 2018-02-21 |
Family
ID=55658403
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014174440A Expired - Fee Related JP6281445B2 (ja) | 2014-08-28 | 2014-08-28 | 液面検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6281445B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6422908B2 (ja) | 2016-03-15 | 2018-11-14 | 矢崎総業株式会社 | コネクタ |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS595911A (ja) * | 1982-07-01 | 1984-01-12 | Omron Tateisi Electronics Co | 距離・角度測定装置 |
| JPS60179928U (ja) * | 1984-05-09 | 1985-11-29 | 本田技研工業株式会社 | 液面レベル検出装置 |
| JPH0453527Y2 (ja) * | 1986-07-30 | 1992-12-16 | ||
| JPS6396506A (ja) * | 1986-10-14 | 1988-04-27 | Hamamatsu Photonics Kk | 水準器 |
| JP2987468B2 (ja) * | 1991-03-28 | 1999-12-06 | ニスカ株式会社 | 水準検出方法および装置 |
| JP2000186952A (ja) * | 1998-12-22 | 2000-07-04 | Atsushi Tominaga | 液面検出装置 |
| JP2000258227A (ja) * | 1999-03-12 | 2000-09-22 | Shinkawa Denki Kk | 鏡面、非鏡面物における表面の変位測定装置 |
| JP3940927B2 (ja) * | 2003-08-08 | 2007-07-04 | 船井電機株式会社 | 光ディスク記録装置 |
| FR2868834B1 (fr) * | 2004-04-07 | 2006-08-18 | Robert Andre Charles Dousset | Convertisseur quatre quadrants a jauges opto-electroniques pour la detection et la mesure de la declivite d'un plan oriente |
| US7497021B2 (en) * | 2006-01-24 | 2009-03-03 | Trimble Navigation Limited | Multi-axis bubble vial device |
| JP2008014267A (ja) * | 2006-07-07 | 2008-01-24 | Nissan Motor Co Ltd | 燃料残量検出装置 |
| DE102010016183B4 (de) * | 2010-03-29 | 2015-10-15 | Sartorius Lab Instruments Gmbh & Co. Kg | Optoelektronischer Neigungssensor |
-
2014
- 2014-08-28 JP JP2014174440A patent/JP6281445B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016050781A (ja) | 2016-04-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3115755B1 (en) | System and method for measuring a speed of sound in a liquid or gaseous medium | |
| CN106338320B (zh) | 用于液体的非侵入性连续液位测量的系统和方法 | |
| US10458831B2 (en) | System and method for acoustic container volume calibration | |
| CN106104224B (zh) | 便携式装置、料位测量系统、定位方法、程序单元、计算机可读介质和移动终端的用途 | |
| EP3115754B1 (en) | System and method for non-instrusive and continuous level measurement in a cylindrical vessel | |
| US8638453B2 (en) | Pipe diameter measurement device | |
| JP2010519531A (ja) | 流体面位置測定法及びそのためのシステム | |
| CN101111740B (zh) | 用于测量线段长度的方法及用于实施该方法的装置 | |
| JP3198160U (ja) | 内空断面形状計測装置 | |
| KR20150126532A (ko) | 장애물에 의한 오차를 해소하기 위한 수위 측정 방법 및 이를 이용한 레이더 방식 레벨 게이지 시스템 | |
| JP6281445B2 (ja) | 液面検出装置 | |
| US20160313170A1 (en) | System and method for determining the level of a substance in a container based on measurement of resonance from an acoustic circuit that includes unfilled space within the container that changes size as substance is added or removed from the container | |
| WO2006016224A3 (de) | Ultraschall-niveausensorvorrichtung | |
| JP2018194407A (ja) | 液面検出装置 | |
| CN105424145B (zh) | 燃油测量装置、油箱、车辆以及燃油测量方法 | |
| JP6580741B1 (ja) | 位置検出システムおよび位置検出方法 | |
| JP6866759B2 (ja) | 液面検出装置 | |
| JP4277761B2 (ja) | 液面検出装置 | |
| JP6901213B2 (ja) | 推薬タンクの液面形状計測装置と方法 | |
| JP2005201219A (ja) | 液体性状判別装置 | |
| JP2020122668A (ja) | 液体状態特定装置 | |
| US9322697B2 (en) | System and method for determining the level of a substance in a container based on measurement of resonance from an acoustic circuit that includes unfilled space within the container that changes size as substance is added or removed from the container | |
| JPH06249697A (ja) | 超音波液面計 | |
| JP2005265625A (ja) | 液化ガス貯蔵タンクおよび液化ガスの残量検出方法 | |
| US20200233070A1 (en) | Ultrasonic wave apparatus for measure of distance |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170316 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180108 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6281445 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |