JP6536263B2 - 分注用のラック及び分注システム - Google Patents
分注用のラック及び分注システム Download PDFInfo
- Publication number
- JP6536263B2 JP6536263B2 JP2015152910A JP2015152910A JP6536263B2 JP 6536263 B2 JP6536263 B2 JP 6536263B2 JP 2015152910 A JP2015152910 A JP 2015152910A JP 2015152910 A JP2015152910 A JP 2015152910A JP 6536263 B2 JP6536263 B2 JP 6536263B2
- Authority
- JP
- Japan
- Prior art keywords
- container
- robot
- unit
- liquid
- stage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N35/1009—Characterised by arrangements for controlling the aspiration or dispense of liquids
- G01N35/1011—Control of the position or alignment of the transfer device
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01L—CHEMICAL OR PHYSICAL LABORATORY APPARATUS FOR GENERAL USE
- B01L3/00—Containers or dishes for laboratory use, e.g. laboratory glassware; Droppers
- B01L3/02—Burettes; Pipettes
- B01L3/021—Pipettes, i.e. with only one conduit for withdrawing and redistributing liquids
- B01L3/0217—Pipettes, i.e. with only one conduit for withdrawing and redistributing liquids of the plunger pump type
- B01L3/0237—Details of electronic control, e.g. relating to user interface
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0019—End effectors other than grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0084—Program-controlled manipulators comprising a plurality of manipulators
- B25J9/0087—Dual arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1684—Tracking a line or surface by means of sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M1/00—Apparatus for enzymology or microbiology
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/0099—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor comprising robots or similar manipulators
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
- Y10S901/09—Closed loop, sensor feedback controls arm movement
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/30—End effector
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/46—Sensing device
- Y10S901/47—Optical
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- Robotics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mechanical Engineering (AREA)
- General Health & Medical Sciences (AREA)
- Biochemistry (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Analytical Chemistry (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Biotechnology (AREA)
- Wood Science & Technology (AREA)
- Organic Chemistry (AREA)
- Zoology (AREA)
- General Engineering & Computer Science (AREA)
- Sustainable Development (AREA)
- Microbiology (AREA)
- Medicinal Chemistry (AREA)
- Genetics & Genomics (AREA)
- Biomedical Technology (AREA)
- Human Computer Interaction (AREA)
- Clinical Laboratory Science (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Manipulator (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
Description
1.1 分注システム
第一実施形態に係る分注システム1は、容器90内に収容された液体を選択的に取り出す分注作業を行うためのものである。容器90は、分注システム1による作業の対象物を収容する。容器90は、可視光又は特定の波長の光を透過可能な材質で形成される。容器90は、例えばマイクロチューブであり、筒状の側壁91と底部92とを有する(図2(a)及び図2(b)参照)。側壁91の下側部分91aは、底部92側に向かうに従って窄まるテーパ形状を有する。容器90は、このようなマイクロチューブに限られず、対象物を収容可能であり、可視光又は特定の波長の光を透過可能であればどのような形状であってもよい。
図1に示すように、分注システム1は、ロボット10とカメラ43とを備える。ロボット10は、分注器30を移動させる作業等に用いられる。分注器30は、分注対象の液体C1を吸引する。分注器30としては、特定の信号又は特定の操作により自動で液体の吸引・吐出を行う電動のピペット又はシリンジが挙げられる。分注器30は電動式でなくてもよく、例えば手動式のシリンジ又はピペットであってもよい。この場合、後述するように、双腕型のロボット10の両腕によって分注器30を操作してもよい。このように、分注器30は、液体C1を吸引可能であればどのようなものであってもよいが、以下では分注器30が電動ピペットである場合を例示する。
分注システム1は、テーブル20を更に備えてもよい。テーブル20は、ロボット10に併設されており、ロボット10による作業対象物を支持する。
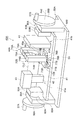
分注システム1は、上記カメラ43を構成要素とするラック40を更に備えてもよい。例えば図1及び図3に示すように、ラック40は、ステージ41と、容器保持部44と、カメラ43とを有する。ステージ41は、例えば矩形の板状体(支持板)であり、傾け可能な状態でテーブル20上に配置される。ステージ41は、実質的に変形しない(構成材の撓み等による微少変形を除く)ものであればどのようなものであってもよい。例えばステージ41は、ブロックであってもよいし、枠組体であってもよい。
分注システム1は、ライト45を更に有してもよい。ライト45は、容器保持部44により保持された容器90に光を照射する。ライト45は、少なくともカメラ43による撮像範囲に光を照射する。ライト45が照射する光は、容器90を透過可能であり、カメラ43により検出可能であればよい。例えばライト45は、赤色の可視光を照射するものであってもよい。ライト45の光源としては、例えばLED(Light Emitting Diode)等が挙げられる。
分注システム1は、コントローラ100を更に備える。コントローラ100は、少なくとも、カメラ43により撮像された画像に基づいて、液面SF1の位置情報と、境界部BD1の位置情報と、分注器30の先端部30aの位置情報とを取得すること、液体C1を分注器30内に吸引する際に、先端部30aの位置情報と、液面SF1の位置情報と、境界部BD1の位置情報とに基づいて、分注器30を下降させるようにロボット10を制御すること、を実行するように構成されている。
(1)全体構成
続いて、プロトコル構築方法の一例として、コントローラ100によるプロトコルの構築手順について説明する。
ステップS101では、工程設定部111が、複数種類の分注作業を含むロボット10の作業工程を設定する。工程設定部111は、複数種類の分注作業を含むロボット10の作業工程をコンソール200から取得し、工程記憶部151に登録する。
続いて、ステップS110における基準データの登録手順について詳細に説明する。
(1)全体構成
続いて、制御方法の一例として、コントローラ100により実行される分注制御手順について説明する。
条件1−1)液面SF1から境界部BD1までの深さに比較して微少であること。
条件1−2)位置制御の誤差が生じても先端部30aを液体C1内に維持できること。
続いて、ステップS305における吸引手順について詳細に説明する。
条件2−1)液面SF1から境界部BD1までの深さに比較して微少であること。
条件2−2)位置制御の誤差が生じても先端部30aが境界部BD1に到達しないこと。
条件3−1)分注器30が容器90の側壁91に干渉しないこと。
この場合においても、目標位置設定部136は、最終目標位置GL1と境界部BD1との鉛直方向における距離が所定の垂直オフセット値VO2となるように最終目標位置GL1を設定する。垂直オフセット値VO2も垂直オフセット値VO1と同様の条件を満たすように予め設定される。
コントローラ100は、液面SF1に対して境界部BD1が傾斜し得る場合(例えば容器90の中心軸線CL1に対して境界部BD1が傾斜している場合)に、液面SF1に対する境界部BD1の傾斜を緩やかにする方向に容器90が傾いた状態で、ステップS305の吸引手順を実行してもよい。この場合、ステップS305では、降下制御部133が、容器90の傾きに対応して分注器30の先端部30aを斜め方向に下降させるようにロボット10を制御する(図19(a)〜(d)参照)。容器90の傾きに対応して先端部30aを斜め方向に下降させるとは、容器90の側壁91に接しないように先端部30aを下降させることを意味する。例えば降下制御部133は、容器90の傾いた中心軸線CL1に沿って先端部30aを下降させるようにロボット10を制御してもよい。
1.4 第一実施形態の効果
但し、降下制御部133による制御を、第一モード制御部133aによる制御と第二モード制御部133bによる制御の二段階に分けることは必須ではない。
ラックは、ステージに固定され、分注対象の液体を収容する容器を保持する容器保持部と、容器を撮像可能な位置にてステージに固定されたカメラと、を備えていればどのようなものであってもよいので、その具体的な構成は上述したラック40として例示したものに限られない。以下、図24〜図27を参照し、ラックの変形例を説明する。
容器保持部44Aは、第一ホルダ70A、第二ホルダ70B及び弾性部材78A,78Bを有する。以下、第一ホルダ70A、第二ホルダ70B及び弾性部材78A,78Bの説明における「上下」は、ステージ41の上面を水平にした場合の上下を意味する。
第一ホルダ70A及び第二ホルダ70Bは、カメラ43の中心軸CL2を挟むように位置し、互いに近接して容器90を挟むように構成されている。例えばステージ41の上面には、二本のガイド71A,71Bが設けられており、第一ホルダ70Aはガイド71Aに取り付けられ、第二ホルダ70Bはガイド71Bに取り付けられている。ガイド71A,71Bは、中心軸CL2に沿う方向に並んでおり、それぞれ中心軸CL2に直交する方向に延びている。鉛直上方から見て、ガイド71Aは中心軸CL2の一方側に位置し、ガイド71Bは中心軸CL2の他方側に位置する。
弾性部材78A、78Bは、第一ホルダ70A及び第二ホルダ70Bを互いに近接させるように反発力を生じる。第一ホルダ70Aのスライド板73Aのうち、ガイド71B側に張り出した部分には、ステージ41側に突出する凸部76Aが形成されている。ステージ41の上面には、中心軸CL2に直交する方向において第二ホルダ70Bの逆側から凸部76Aに対向する凸部77Aが形成されている。弾性部材78Aは、例えばコイルバネであり、圧縮された状態で凸部76A,77Aの間に配置されている。これにより、弾性部材78Aの反発力は、第一ホルダ70Aに対して第二ホルダ70B側に作用する。
ラック40Aは、リンク機構80を更に有してもよい。リンク機構80は、互いに近接又は離間する際の第一ホルダ70A及び第二ホルダ70Bの移動量が等しくなるように、第一ホルダ70A及び第二ホルダ70Bを連動させる。例えばリンク機構80は、ピン81A,81B及びリンク83を有する。
ステージ保持部50Aは、容器保持部44とカメラ43とが並ぶ方向に沿う軸線Ax2(第一軸線)まわりに回転可能となるようにステージ41を保持する。軸線Ax2は、カメラ43の中心軸CL2に平行であってもよく、中心軸CL2とステージ41との間(図27の領域R1参照)に位置してもよい。軸線Ax2は、鉛直上方から見て中心軸CL2と重なる位置にあってもよい。
角度保持機構60Aは、外力によるトルクが作用した場合にステージ41の回転を許容し、外力によるトルクが作用しない場合にステージ41の回転を規制する。角度保持機構60Aは、例えば摩擦負荷63A,63Bを有する。摩擦負荷63Aは、軸54Aの周囲においてブラケット53A,55Aの間に介在し、これらの間に摩擦トルクを発生させる。摩擦負荷63Bは、軸54Bの周囲においてブラケット53B,55Bの間に介在し、これらの間に摩擦トルクを発生させる。摩擦負荷63A,63Bの静摩擦トルクは、その合計値が、軸線Ax2まわりに回転可能な部分の自重によるトルクを上回るように設定されている。
ラック40Aは、第一ハンドル56A及び第二ハンドル56Bを更に有してもよい。第一ハンドル56Aは、軸線Ax2が延びる方向におけるステージ41の一端側に設けられ、ステージ41にトルクを伝達可能である。第二ハンドル56Bは、軸線Ax2が延びる方向におけるステージ41の他端側に設けられ、ステージ41にトルクを伝達可能である。
以上、ラック40Aにおいて例示したように、ラック40Aの第一軸線(軸線Ax2)は、カメラ43の中心軸CL2に平行であり、カメラ43の中心軸CL2とステージ41との間に位置してもよい。この場合、第一軸線がラック40Aの外縁に位置する場合に比べ、第一軸線まわりに回転する部分の回転半径が小さくなる。このため、ラックの占有面積を縮小できる。
第二実施形態に係る分注システム1Aは、分注システム1のコントローラ100をコントローラ100Aに置き換えたものである。
図29に示すように、コントローラ100Aは、コントローラ100のプロトコル構築部110、画像処理部120及びロボット制御部130をプロトコル構築部110A、画像処理部120A及びロボット制御部130Aにそれぞれ置き換えると共に、解析領域設定部170を付加したものである。コントローラ100Aは、コントローラ100において例示したものと同様のハードウェアにより構成可能である。このため、ハードウェア構成の説明は省略し、機能モジュールのみについて説明する。
プロトコル構築部110Aは、複数種類の分注作業を含むロボット10の作業工程を設定して工程記憶部151に登録する。例えばプロトコル構築部110Aは、プロトコル構築部110と同様に工程設定部111を有するが、割込部112、工程確認部114及び基準データ登録部113を有しない。このため、プロトコル構築部110Aは、上述した基準データの登録を行わない。
解析領域設定部170は、容器90内に収容された液体C1及び非分注対象物C2の量を示す情報に基づいて、液体C1を画像内で探索するための解析領域(本実施形態では、これを「第一の解析領域」という。)を設定する。
図30に示すように、画像処理部120Aは、カメラ43により撮像された画像に基づいて、液面SF1の位置情報と、境界部BD1の位置情報と、先端部30aの位置情報とを取得する。例えば画像処理部120Aは、画像取得部121と、第一処理部122と、第二処理部123と、出力部124と、参照情報記憶部125とを有する。
ロボット制御部130Aは、ロボット制御部130に副制御部139を付加したものである。副制御部139は、先端部30a、液面SF1及び境界部BD1の少なくともいずれかについて、画像処理部120から位置情報が得られない場合に、降下制御部133に代わって、予め設定されたパターンに基づいてロボット10を制御する、
(1)全体構成
続いて、制御方法の一例として、コントローラ100Aにより実行される分注制御手順について説明する。
続いて、ステップS608における吸引手順について詳細に説明する。
以上、第二実施形態において例示したように、画像処理部120Aは、先端部30aの位置情報を取得した後の先端部30aの位置変化を推定し、この位置変化に基づいて先端部30aの位置情報を更新してもよい。先端部30aは、液体C1中に位置する際に液面SF1及び境界部BD1に比べ画像認識し難い傾向がある一方で、その位置変化をロボット10の状態から推定し易い。このため、先端部30aの位置情報を位置変化の推定により更新することで、降下制御部の制御の信頼性を高めることができる。
液体C1の吸引に際してロボット10が分注器30を下降させるときに、画像の取得及び各種位置情報の取得を繰り返すことは必須ではない。例えば、コントローラ100は、画像処理部120により各種位置情報を一度取得した後には、当該位置情報を基準にして以降の位置情報を算出するように構成されていてもよい。
分注器30は電動ピペットに限られない。分注器30は、例えばシリンジであってもよい。この場合、コントローラ100は、アーム13A,13Bのいずれか一方によってシリンジの外筒を把持し、アーム13A,13Bの他方によってシリンジのプランジャを押し引きするようにロボット10を制御してもよい。
Claims (13)
- ステージに固定され、分注対象の液体を収容する容器を保持する容器保持部と、
前記容器を撮像可能な位置にて前記ステージに固定されたカメラと、
前記容器保持部と前記カメラとが並ぶ方向に沿う第一軸線まわりに回転可能となるように前記ステージを保持するステージ保持部と、を備える分注用のラック。 - 前記第一軸線は、前記カメラの中心軸に平行であり、前記カメラの中心軸と前記ステージとの間に位置する、請求項1記載の分注用のラック。
- 外力によるトルクが作用した場合に前記ステージの回転を許容し、外力によるトルクが作用しない場合に前記ステージの回転を規制する角度保持機構を更に備える、請求項1又は2記載の分注用のラック。
- 前記第一軸線が延びる方向における前記ステージの一端側に設けられ、前記ステージにトルクを伝達可能な第一ハンドルと、
前記第一軸線が延びる方向における前記ステージの他端側に設けられ、前記ステージにトルクを伝達可能な第二ハンドルと、を更に有する、請求項1〜3のいずれか一項記載の分注用のラック。 - 前記容器に光を照射可能な位置にて前記ステージに固定されたライトを更に備える、請求項1〜4のいずれか一項記載の分注用のラック。
- 前記容器保持部は、前記カメラと前記ライトとの間に位置している、請求項5記載の分注用のラック。
- 前記容器保持部は、前記カメラの中心軸を挟むように位置し、互いに近接して容器を挟むように構成された第一ホルダ及び第二ホルダと、
前記第一ホルダ及び前記第二ホルダを互いに近接させるように反発力を生じる弾性部材とを更に有する、請求項1〜6のいずれか一項記載の分注用のラック。 - 互いに近接又は離間する際の前記第一ホルダ及び前記第二ホルダの移動量が等しくなるように、前記第一ホルダ及び前記第二ホルダを連動させるリンク機構を更に有する、請求項7記載の分注用のラック。
- 請求項1〜8のいずれか一項に記載の分注用のラックと、
ロボットと、
前記容器を搬送し、前記容器保持部に保持させるように前記ロボットを制御することと、前記カメラにより撮像された画像に基づいて前記液体の液面の位置情報を取得することと、前記ラックを傾けるように前記ロボットを制御することと、前記液体を分注器内に吸引する際に、前記液面の位置情報に基づいて前記分注器を下降させるように前記ロボットを制御することと、を実行するように構成されたコントローラと、を備える分注システム。 - 前記コントローラは、前記第一軸線まわりに前記ラックを傾けるように前記ロボットを制御する、請求項9記載の分注システム。
- 前記コントローラは、前記カメラにより撮像された画像に基づいて、前記ロボットを基準とした前記分注器の先端部の位置のキャリブレーションを更に実行するように構成されている、請求項9又は10記載の分注システム。
- ステージに固定され、分注対象の液体を収容する容器を保持する容器保持部と、
前記容器を撮像可能な位置にて前記ステージに固定されたカメラと、を備え、
前記容器保持部は、前記カメラの中心軸を挟むように位置し、互いに近接して容器を挟むように構成された第一ホルダ及び第二ホルダと、
前記第一ホルダ及び前記第二ホルダを互いに近接させるように反発力を生じる弾性部材と、を有する分注用のラック。 - ステージに固定され、分注対象の液体を収容する容器を保持する容器保持部と、前記容器を撮像可能な位置にて前記ステージに固定されたカメラと、を備える分注用のラックと、
ロボットと、
前記容器を搬送し、前記容器保持部に保持させるように前記ロボットを制御することと、前記カメラにより撮像された画像に基づいて前記液体の液面の位置情報を取得することと、前記ラックを傾けるように前記ロボットを制御することと、前記液体を分注器内に吸引する際に、前記液面の位置情報に基づいて前記分注器を下降させるように前記ロボットを制御することと、を実行するように構成されたコントローラと、を備える分注システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/146,291 US10837977B2 (en) | 2015-05-11 | 2016-05-04 | Rack for dispensing and dispensing system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| WOPCT/JP2015/063515 | 2015-05-11 | ||
| PCT/JP2015/063515 WO2016181466A1 (ja) | 2015-05-11 | 2015-05-11 | 分注システム、コントローラ及び制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016212077A JP2016212077A (ja) | 2016-12-15 |
| JP6536263B2 true JP6536263B2 (ja) | 2019-07-03 |
Family
ID=57247840
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017517582A Active JP6492273B2 (ja) | 2015-05-11 | 2015-07-31 | 分注システム、コントローラ及び制御方法 |
| JP2015152910A Expired - Fee Related JP6536263B2 (ja) | 2015-05-11 | 2015-07-31 | 分注用のラック及び分注システム |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017517582A Active JP6492273B2 (ja) | 2015-05-11 | 2015-07-31 | 分注システム、コントローラ及び制御方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10697991B2 (ja) |
| EP (1) | EP3296069B1 (ja) |
| JP (2) | JP6492273B2 (ja) |
| WO (2) | WO2016181466A1 (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018079702A1 (ja) | 2016-10-28 | 2018-05-03 | 株式会社Nrlファーマ | ラクトフェリン/アルブミン融合タンパク質及びその製造方法 |
| JP2018176295A (ja) * | 2017-04-03 | 2018-11-15 | 川崎重工業株式会社 | ロボット及びその動作方法 |
| WO2019064751A1 (ja) * | 2017-09-28 | 2019-04-04 | 日本電産株式会社 | ロボット教示システム、ロボット教示方法、制御装置、及びコンピュータプログラム |
| WO2019064752A1 (ja) * | 2017-09-28 | 2019-04-04 | 日本電産株式会社 | ロボット教示システム、ロボット教示方法、制御装置、及びコンピュータプログラム |
| JP2019117071A (ja) * | 2017-12-26 | 2019-07-18 | 川崎重工業株式会社 | 分注方法 |
| CN113519209B (zh) * | 2019-01-04 | 2023-01-24 | 捷普有限公司 | 提供电路板组件底部填充物分配器的设备、系统和方法 |
| JP7071301B2 (ja) * | 2019-01-25 | 2022-05-18 | 株式会社日立ハイテク | 生体試料検出装置 |
| JP7204587B2 (ja) * | 2019-06-17 | 2023-01-16 | 株式会社東芝 | 物体ハンドリング制御装置、物体ハンドリング装置、物体ハンドリング方法および物体ハンドリングプログラム |
| KR102701980B1 (ko) * | 2019-09-18 | 2024-09-02 | 엘지전자 주식회사 | 액체통에 담긴 액체의 수위를 산출하는 로봇 및 방법 |
| JP6725930B1 (ja) * | 2020-04-08 | 2020-07-22 | 株式会社エクサウィザーズ | 液体秤量方法、制御装置、コンピュータプログラム及び学習方法 |
| JP7597999B2 (ja) * | 2020-06-29 | 2024-12-11 | 澁谷工業株式会社 | 液体吸引排出装置 |
| EP4521120B1 (en) * | 2020-12-21 | 2026-04-01 | Tecan Trading AG | Iterative liquid aspiration |
| JP7600049B2 (ja) * | 2021-08-02 | 2024-12-16 | 株式会社日立ハイテク | 検体性状判別装置 |
| JPWO2023176401A1 (ja) * | 2022-03-17 | 2023-09-21 | ||
| JP2023147725A (ja) * | 2022-03-30 | 2023-10-13 | セイコーエプソン株式会社 | ロボット制御装置、ロボット制御方法およびロボット制御プログラム |
| CN119233880A (zh) * | 2022-05-20 | 2024-12-31 | 恩特格里斯公司 | 机械臂的臂末端附接件 |
| EP4293362B1 (en) * | 2022-06-15 | 2025-09-17 | TECAN Trading AG | A method of operating a pipetting system and a pipetting system |
| EP4296684A1 (en) * | 2022-06-20 | 2023-12-27 | Tecan Trading AG | Liquid interface estimation for liquid aspiration |
| WO2025197372A1 (ja) * | 2024-03-22 | 2025-09-25 | 株式会社日立ハイテク | 自動分析装置 |
Family Cites Families (71)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4730435A (en) * | 1986-04-07 | 1988-03-15 | Aqua-Chem, Inc. | Sterile docking system for filling IV bags |
| US5341854A (en) * | 1989-09-28 | 1994-08-30 | Alberta Research Council | Robotic drug dispensing system |
| US5366896A (en) * | 1991-07-30 | 1994-11-22 | University Of Virginia Alumni Patents Foundation | Robotically operated laboratory system |
| US5337919A (en) * | 1993-02-11 | 1994-08-16 | Dispensing Technologies, Inc. | Automatic dispensing system for prescriptions and the like |
| US5431201A (en) * | 1993-12-03 | 1995-07-11 | Technology 2000 Incororated | Robotic admixture system |
| US5534222A (en) * | 1995-07-11 | 1996-07-09 | Purity Packaging A Division Of Great Pacific Enterprises | Method for sterilizing internal surfaces of an edible liquid packaging machine |
| US5805454A (en) * | 1995-08-10 | 1998-09-08 | Valerino, Sr.; Fred M. | Parenteral products automation system (PPAS) |
| US6048086A (en) * | 1995-08-10 | 2000-04-11 | Valerino, Sr.; Fred M. | Parenteral products automatic system (PPAS) with an oral/solid interface |
| US20010056311A1 (en) * | 1997-09-25 | 2001-12-27 | Fred M. Valerino | Automatic empty carrier storage, retrieval and distribuition system |
| US5797515A (en) * | 1995-10-18 | 1998-08-25 | Adds, Inc. | Method for controlling a drug dispensing system |
| US5925885A (en) * | 1996-05-22 | 1999-07-20 | Purepulse Technologies, Inc. | Parametric control in pulsed light sterilization of packages and their contents |
| US5786598A (en) * | 1996-05-22 | 1998-07-28 | Purepulse Technologies, Inc. | Sterilization of packages and their contents using high-intensity, short-duration pulses of incoherent, polychromatic light in a broad spectrum |
| KR100454611B1 (ko) * | 1996-10-30 | 2005-06-10 | 스미또모 가가꾸 고오교오 가부시끼가이샤 | 합성실험자동화시스템및분액처리장치와반응용기 |
| CA2276462C (en) * | 1996-12-31 | 2007-06-12 | High Throughput Genomics, Inc. | Multiplexed molecular analysis system apparatus and method |
| US6066294A (en) * | 1997-08-21 | 2000-05-23 | Ethicon, Inc. | Multi-compartment sterilization system |
| US5941867A (en) * | 1997-07-15 | 1999-08-24 | Kao; Ti | Formulation of pharmaceutical solutions in free fall |
| US6213853B1 (en) * | 1997-09-10 | 2001-04-10 | Speedfam-Ipec Corporation | Integral machine for polishing, cleaning, rinsing and drying workpieces |
| US6902703B2 (en) * | 1999-05-03 | 2005-06-07 | Ljl Biosystems, Inc. | Integrated sample-processing system |
| US6037598A (en) * | 1998-01-28 | 2000-03-14 | Tetra Laval Holdings & Finance, Sa | Arrangement on an ultraviolet sterilization system |
| JP2004525673A (ja) * | 2000-12-14 | 2004-08-26 | ユーブイ−ソルーションズ・エルエルシー | 小型の物品を迅速に滅菌する方法及び装置 |
| US20030074223A1 (en) * | 2001-09-24 | 2003-04-17 | Scott Laboratories, Inc. | Methods and apparatuses for assuring quality and safety of drug administration and medical products and kits |
| US6604903B2 (en) * | 2001-11-30 | 2003-08-12 | Forhealth Technologies, Inc. | Automated drug vial safety cap removal |
| US7228198B2 (en) * | 2002-08-09 | 2007-06-05 | Mckesson Automation Systems, Inc. | Prescription filling apparatus implementing a pick and place method |
| US6915823B2 (en) * | 2002-12-03 | 2005-07-12 | Forhealth Technologies, Inc. | Automated apparatus and process for reconstitution and delivery of medication to an automated syringe preparation apparatus |
| US7753085B2 (en) * | 2002-12-03 | 2010-07-13 | Forhealth Technologies, Inc. | Automated drug preparation apparatus including automated drug reconstitution |
| US6832844B2 (en) * | 2002-12-03 | 2004-12-21 | Field Controls, L.L.C. | Ultraviolet lamp assembly |
| US7875245B2 (en) * | 2003-05-14 | 2011-01-25 | Dako Denmark A/S | Method and apparatus for automated pre-treatment and processing of biological samples |
| EP2413136B1 (en) * | 2003-07-18 | 2013-07-03 | Bio-Rad Laboratories, Inc. | System and method for multi-analyte detection |
| US7488451B2 (en) | 2003-09-15 | 2009-02-10 | Millipore Corporation | Systems for particle manipulation |
| US20060024690A1 (en) * | 2003-09-19 | 2006-02-02 | Kao H P | Normalization of data using controls |
| US20050226779A1 (en) * | 2003-09-19 | 2005-10-13 | Oldham Mark F | Vacuum assist for a microplate |
| US7570443B2 (en) * | 2003-09-19 | 2009-08-04 | Applied Biosystems, Llc | Optical camera alignment |
| JP2005201882A (ja) | 2003-12-16 | 2005-07-28 | Olympus Corp | 使い捨てチップの先端検出方法と使い捨てチップを用いた分注装置 |
| JP2007526479A (ja) | 2004-03-02 | 2007-09-13 | ダコ デンマーク アクティーゼルスカブ | 生物学的染色装置のための試薬送達システム、分配デバイスおよび容器 |
| US7343943B2 (en) * | 2004-05-13 | 2008-03-18 | Forhealth Technologies, Inc. | Medication dose underfill detection system and application in an automated syringe preparing system |
| US7128105B2 (en) * | 2004-04-07 | 2006-10-31 | Forhealth Technologies, Inc. | Device for reconstituting a drug vial and transferring the contents to a syringe in an automated matter |
| US7163035B2 (en) * | 2004-05-13 | 2007-01-16 | Forhealth Technologies, Inc. | Automated use of a vision system to detect foreign matter in reconstituted drugs before transfer to a syringe |
| JP2005304303A (ja) * | 2004-04-16 | 2005-11-04 | Olympus Corp | 給排ロボットおよび自動培養装置 |
| US7017623B2 (en) * | 2004-06-21 | 2006-03-28 | Forhealth Technologies, Inc. | Automated use of a vision system to unroll a label to capture and process drug identifying indicia present on the label |
| US7726514B2 (en) * | 2004-07-07 | 2010-06-01 | Rxmedic Systems, Inc. | Automated article dispensation mechanism |
| US7783383B2 (en) * | 2004-12-22 | 2010-08-24 | Intelligent Hospital Systems Ltd. | Automated pharmacy admixture system (APAS) |
| US20060157507A1 (en) * | 2004-12-30 | 2006-07-20 | Chang Byeong S | Multi-functional container closure delivery system |
| JP2009520963A (ja) * | 2005-12-21 | 2009-05-28 | テカン・トレーディング・アクチェンゲゼルシャフト | 液体移送を点検する方法と装置 |
| US7876935B2 (en) | 2006-01-30 | 2011-01-25 | Protedyne Corporation | Sample processing apparatus with a vision system |
| EP2064557B1 (en) * | 2006-09-22 | 2015-09-16 | Clondiag GmbH | A dispenser device for and a method of dispensing a substance onto a substrate |
| EP2136911A2 (en) | 2007-01-19 | 2009-12-30 | Biodot, Inc. | Systems and methods for high speed array printing and hybridization |
| EP2148206B1 (en) | 2008-07-25 | 2015-11-18 | F.Hoffmann-La Roche Ag | A laboratory system for handling sample tube racks, an alignmemt element for sample tube racks and a rack tray receiver assembly |
| US8559699B2 (en) | 2008-10-10 | 2013-10-15 | Roboticvisiontech Llc | Methods and apparatus to facilitate operations in image based systems |
| JP2010096643A (ja) * | 2008-10-17 | 2010-04-30 | Hitachi High-Technologies Corp | 分注装置、及びそれを用いた検体処理装置,自動分析装置 |
| JP2010197047A (ja) * | 2009-02-20 | 2010-09-09 | Beckman Coulter Inc | 分注方法、分析装置および分析装置 |
| CN102803959B (zh) * | 2009-05-15 | 2015-07-08 | 生物梅里埃有限公司 | 用于样品中的微生物剂的快速的识别和/或表征的系统和方法 |
| EP2752668A3 (en) * | 2010-07-23 | 2014-10-15 | Beckman Coulter, Inc. | System Or Method Of Including Analytical Units |
| WO2012069925A1 (en) | 2010-11-23 | 2012-05-31 | Andrew Alliance S.A | Devices and methods for programmable manipulation of pipettes |
| JP5709678B2 (ja) | 2011-07-14 | 2015-04-30 | パナソニックヘルスケアホールディングス株式会社 | 分注装置 |
| AU2012287299C1 (en) * | 2011-07-22 | 2016-02-18 | Roche Diagnostics Hematology, Inc. | Fluid sample preparation systems and methods |
| US9404864B2 (en) | 2013-03-13 | 2016-08-02 | Denovo Sciences, Inc. | System for imaging captured cells |
| US9810704B2 (en) * | 2013-02-18 | 2017-11-07 | Theranos, Inc. | Systems and methods for multi-analysis |
| US10012664B2 (en) * | 2011-09-25 | 2018-07-03 | Theranos Ip Company, Llc | Systems and methods for fluid and component handling |
| JP5474903B2 (ja) * | 2011-09-28 | 2014-04-16 | あおい精機株式会社 | 検査前処理装置、検査前処理方法、及び検体処理装置 |
| FR2987896B1 (fr) | 2012-03-08 | 2014-04-25 | Noviloire | Automate d'analyse medicale et procede correspondant |
| JP6170917B2 (ja) * | 2012-06-25 | 2017-07-26 | 協和メデックス株式会社 | 容器把持装置 |
| US9962728B2 (en) | 2012-09-20 | 2018-05-08 | Te Connectivity Corporation | Fluid dispensing machine and method of dispensing fluid |
| US20140112829A1 (en) | 2012-10-22 | 2014-04-24 | Qiagen Gaithersburg, Inc. | Tube strip handling and heating apparatus |
| US10228382B2 (en) * | 2012-11-01 | 2019-03-12 | Leica Biosystems Melbourne Pty Ltd | Fluid transport system and method for treating one or more tissue samples on a slide |
| US8912007B2 (en) * | 2013-01-22 | 2014-12-16 | Tecan Trading Ag | Optical measuring apparatus and method for the analysis of samples contained in liquid drops |
| US9488576B2 (en) * | 2013-01-22 | 2016-11-08 | Tecan Trading Ag | Optical measuring apparatus and method for the analysis of samples contained in liquid drops |
| JP5928435B2 (ja) * | 2013-11-01 | 2016-06-01 | 株式会社安川電機 | ロボットシステム、検査方法および被検査物の生産方法 |
| WO2015066342A1 (en) * | 2013-11-04 | 2015-05-07 | Siemens Healthcare Diagnostics Inc. | Methods and apparatus for determining aspiration and/or dispensing volume and/or pipette positioning |
| EP3101428B1 (en) | 2014-01-27 | 2021-07-07 | Hitachi High-Tech Corporation | Automatic analytical apparatus |
| US10837977B2 (en) * | 2015-05-11 | 2020-11-17 | Kabushiki Kaisha Yaskawa Denki | Rack for dispensing and dispensing system |
| US10518289B2 (en) * | 2015-10-15 | 2019-12-31 | The Boeing Company | Apparatuses for applying glutinous substances |
-
2015
- 2015-05-11 WO PCT/JP2015/063515 patent/WO2016181466A1/ja not_active Ceased
- 2015-07-31 JP JP2017517582A patent/JP6492273B2/ja active Active
- 2015-07-31 WO PCT/JP2015/071887 patent/WO2016181572A1/ja not_active Ceased
- 2015-07-31 JP JP2015152910A patent/JP6536263B2/ja not_active Expired - Fee Related
- 2015-07-31 EP EP15891896.1A patent/EP3296069B1/en active Active
-
2017
- 2017-11-08 US US15/806,339 patent/US10697991B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016181572A1 (ja) | 2016-11-17 |
| JP2016212077A (ja) | 2016-12-15 |
| EP3296069B1 (en) | 2020-09-02 |
| EP3296069A1 (en) | 2018-03-21 |
| US20180238923A1 (en) | 2018-08-23 |
| JP6492273B2 (ja) | 2019-04-03 |
| US10697991B2 (en) | 2020-06-30 |
| WO2016181466A1 (ja) | 2016-11-17 |
| EP3296069A4 (en) | 2019-03-13 |
| JPWO2016181572A1 (ja) | 2018-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6536263B2 (ja) | 分注用のラック及び分注システム | |
| US10837977B2 (en) | Rack for dispensing and dispensing system | |
| US9409291B2 (en) | Robot system, method for inspection, and method for producing inspection object | |
| JP6029971B2 (ja) | 検体分析装置およびピアサーの位置調整方法 | |
| EP3457241A1 (en) | Gripping device and conveying apparatus | |
| JP5850625B2 (ja) | 分析装置及び位置確認方法 | |
| US10591709B2 (en) | Cell imaging apparatus and cell imaging method | |
| EP3112027B1 (en) | Specimen processing apparatus for genetic testing | |
| US10234364B2 (en) | Sample processing apparatus and rack | |
| JP4320266B2 (ja) | 分注装置およびそれを備えた分析装置 | |
| JPWO2018193719A1 (ja) | 細胞移動装置及び細胞移動方法 | |
| US20170274372A1 (en) | Pipetting system | |
| WO2014158936A1 (en) | Laser triangulation for pipette tip position | |
| US10245734B2 (en) | Manipulation system and control method thereof | |
| JP2009074870A (ja) | 検体分析用液体吸入装置および検体分析装置 | |
| JP2003014770A (ja) | 開栓装置及び分注装置 | |
| CN1980730A (zh) | 试管搅动装置,包括试管的光学探测装置 | |
| US20260077500A1 (en) | Robot system | |
| JP7399681B2 (ja) | 培養操作装置 | |
| JP7029135B2 (ja) | 薬剤感受性試験用接種機 | |
| JP2026026502A (ja) | 吸引吐出装置、液滴除去用治具、吸引吐出装置の制御方法および液滴除去方法 | |
| CN118304171A (zh) | 基于图像识别的配液方法 | |
| JP2025127103A (ja) | 自動分注装置 | |
| JP2024068947A (ja) | ロボットシステム | |
| JP2020080759A (ja) | 細胞回収装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180117 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190520 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6536263 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |