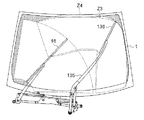
図1は、本発明の実施の形態に係る払拭範囲可変ワイパ装置(以下、「ワイパ装置」と称する)2を含むワイパシステム100の一例を示した概略図である。図1に示したワイパシステム100は、例えば、乗用自動車等の車両に備えられた「ウィンドシールド」としてのウィンドシールドガラス1を払拭するためのものであり、一対のワイパアーム(後述する運転席側ワイパアーム17及び助手席側ワイパアーム35)と、第1モータ11と、第2モータ12と、制御回路52と、駆動回路56と、ウォッシャ装置70と、を含んで構成されている。
図1は、右ハンドル車の場合を示しているので、車両の右側(図1の左側)が運転席側、車両の左側(図1の右側)が助手席側である。車両が左ハンドル車の場合には、車両の左側(図1の右側)が運転席側、車両の右側(図1の左側)が助手席側になる。また、車両が左ハンドル車の場合には、ワイパ装置2の構成が左右反対になる。
第1モータ11は、出力軸が所定の回転角度の範囲で正回転及び逆回転することにより、運転席側ワイパアーム17及び助手席側ワイパアーム35の各々をウィンドシールドガラス1上で往復動作させるための駆動源である。本実施の形態では、第1モータ11が正回転した場合に、運転席側ワイパアーム17は運転席側ワイパブレード18が下反転位置P2Dから上反転位置P1Dを払拭するように動作し、助手席側ワイパアーム35は助手席側ワイパブレード36が下反転位置P2Pから上反転位置P1Pを払拭するように動作する。また、第1モータ11が逆回転した場合には、運転席側ワイパアーム17は運転席側ワイパブレード18が上反転位置P1Dから下反転位置P2Dを払拭するように動作し、助手席側ワイパアーム35は助手席側ワイパブレード36が上反転位置P1Pから下反転位置P2Pを払拭するように動作する。
ウィンドシールドガラス1の外縁部は、可視光及び紫外線を遮るため、セラミックス系の黒色顔料が塗布された遮光部1Aとなっている。黒色顔料は、ウィンドシールドガラス1の車室内側の外縁部に塗布された後、所定温度で加熱されることにより溶融し、ウィンドシールドガラス1の車室側表面に定着される。ウィンドシールドガラス1は、外縁部に塗布された接着剤により車体に固定されるが、図1に示したように、紫外線を透過させない遮光部1Aを外縁部に設けることにより、紫外線による当該接着剤の劣化を抑制する。
後述する第2モータ12が動作しない場合には、第1モータ11の出力軸(後述する第1出力軸11A)が0°から所定の回転角度(以下、「第1所定回転角度」と称する)までの回転角度で正回転及び逆回転することにより、運転席側ワイパブレード18は払拭範囲H1を、助手席側ワイパブレード36は払拭範囲Z1を、各々払拭する。
第2モータ12は、当該第2モータ12の出力軸(後述する第2出力軸12A)が0°から所定の回転角度(以下、「第2所定回転角度」と称する)までの回転角度で正回転及び逆回転することにより、助手席側ワイパアーム35を見かけ上伸長させる駆動源である。前述の第1モータ11が動作中に第2モータ12が動作することにより、助手席側ワイパアーム35は助手席側上方に見かけ上伸長され、助手席側ワイパブレード36は払拭範囲Z2を払拭する。また、第2所定回転角度の大きさを変更することにより、助手席側ワイパアーム35が伸長する範囲を変更することが可能となる。例えば、第2所定回転角度を大きくすれば、助手席側ワイパアーム35が伸長する範囲は大きくなり、第2所定回転角度を小さくすれば、助手席側ワイパアーム35が伸長する範囲は小さくなる。
第1モータ11及び第2モータ12は、各々の出力軸の回転方向を正回転及び逆回転に制御可能であると共に、各々の出力軸の回転速度も制御可能なモータであり、一例としてブラシ付きDCモータ及びブラシレスDCモータのいずれかである。
第1モータ11及び第2モータ12には、各々の回転を制御するための制御回路52が接続されている。本実施の形態に係る制御回路52は、例えば、第1モータ11及び第2モータ12の各々の出力軸末端付近に設けられた「回転角検出部」としての絶対角センサ(図示せず)が検知した第1モータ11及び第2モータ12の各々の出力軸の回転方向、回転位置、回転速度及び回転角度に基づいて、第1モータ11及び第2モータ12の各々に印加する電圧のデューティ比を算出する。
本実施の形態では、第1モータ11及び第2モータ12の各々に印加する電圧を、電源である車載バッテリの電圧(略12V)をスイッチング素子によってオンオフしてパルス状の波形に変調するパルス幅変調(PWM)によって生成する。本実施の形態でデューティ比は、PWMによって生成される電圧の波形の1周期間に対する前述のスイッチング素子がオンになったことで生じる1のパルスの時間の割合である。また、PWMによって生成される電圧の波形の1周期は、前述の1のパルスの時間と前述のスイッチング素子がオフになりパルスが生じない時間との和である。駆動回路56は、制御回路52によって算出されたデューティ比に従って駆動回路56内のスイッチング素子をオンオフさせて第1モータ11及び第2モータ12の各々に印加する電圧を生成し、生成した電圧を第1モータ11及び第2モータ12の各々の巻線の端子に印加する。
本実施の形態に係る第1モータ11及び第2モータ12の各々は、ウォームギアで構成された減速機構を有しているので、各々の出力軸の回転方向、回転速度及び回転角度は、第1モータ11本体及び第2モータ12本体の各々の回転速度及び回転角度と同一ではない。しかしながら、本実施の形態では、各モータと各減速機構とは、一体不可分に構成されているので、以下、第1モータ11及び第2モータ12の各々の出力軸の回転速度及び回転角度を、第1モータ11及び第2モータ12の各々の回転方向、回転速度及び回転角度とみなすものとする。
絶対角センサは、例えば第1モータ11及び第2モータ12の各々の減速機構内に設けられ、各々の出力軸に連動して回転する励磁コイル又はマグネットの磁界(磁力)を電流に変換して検出するセンサであり、一例として、MRセンサ等の磁気センサである。
制御回路52は、第1モータの出力軸末端付近に設けられた絶対角センサが検出した第1モータ11の出力軸の回転角度から運転席側ワイパブレード18のウィンドシールドガラス1上での位置を算出可能なマイクロコンピュータ58を備えている。マイクロコンピュータ58は、算出した位置に応じて第1モータ11の出力軸の回転速度が変化するように駆動回路56を制御する。
また、マイクロコンピュータ58は、第1モータの出力軸末端付近に設けられた絶対角センサが検出した第1モータ11の出力軸の回転角度から助手席側ワイパブレード36のウィンドシールドガラス1上での位置を算出し、算出した位置に応じて第2モータ12の出力軸の回転速度が変化するように駆動回路56を制御する。また、マイクロコンピュータ58は、第2モータ12の出力軸末端付近に設けられた絶対角センサが検出した第2モータ12の出力軸の回転角度から助手席側ワイパアーム35の伸長の程度を算出する。
制御回路52には、駆動回路56の制御に用いるデータ及びプログラムを記憶した記憶装置であるメモリ60が設けられている。メモリ60は、運転席側ワイパブレード18及び助手席側ワイパブレード36のウィンドシールドガラス1上の位置を示す第1モータ11の出力軸の回転角度に応じて第1モータ11及び第2モータ12の各々の出力軸の回転速度等(回転角度を含む)を算出するためのデータ及びプログラムを記憶している。
また、マイクロコンピュータ58には、車両のエンジン等の制御を統括する車両ECU(Electronic Control Unit)90が接続されている。また、車両ECU90には、ワイパスイッチ50、方向指示器スイッチ54、ウォッシャスイッチ62、レインセンサ76、車両の速度を検知する車速センサ92、車両の前方を撮影する車載カメラ94、GPS(Global Positioning System)装置96及び操舵角センサ98が接続されている。
ワイパスイッチ50は、車両のバッテリから第1モータ11に供給される電力をオン又はオフするスイッチである。ワイパスイッチ50は、運転席側ワイパブレード18及び助手席側ワイパブレード36を、低速で動作させる低速作動モード選択位置、高速で動作させる高速作動モード選択位置、一定周期で間欠的に動作させる間欠作動モード選択位置、レインセンサ76が雨滴を検知した場合に動作させるAUTO(オート)作動モード選択位置、格納(停止)モード選択位置に切替可能である。また、各モードの選択位置に応じた信号を、車両ECU90を介してマイクロコンピュータ58に出力する。
ワイパスイッチ50から各モードの選択位置に応じて出力された信号が車両ECU90を介してマイクロコンピュータ58に入力されると、マイクロコンピュータ58がワイパスイッチ50からの出力信号に対応する制御をメモリ60に記憶されたデータ及びプログラムを用いて行う。
本実施の形態では、ワイパスイッチ50には、助手席側ワイパブレード36の払拭範囲を払拭範囲Z2に変更する拡大モードスイッチが別途設けられていてもよい。拡大モードスイッチがオンになると、所定の信号が車両ECU90を介してマイクロコンピュータ58に入力される。マイクロコンピュータ58は、所定の信号が入力されると、例えば、助手席側ワイパブレード36が下反転位置P2Pから上反転位置P1Pに動作する場合に、払拭範囲Z2を払拭するように第2モータ12を制御する。
方向指示器スイッチ54は、車両の方向指示器(図示せず)の作動を指示するスイッチであり、運転者の操作により、右又は左の方向指示器をオンにするための信号を車両ECU90に出力する。車両ECU90は、方向指示器スイッチ54から出力された信号に基づいて、右又は左の方向指示器のランプを点滅させる。方向指示器スイッチ54から出力された信号は、車両ECU90を介してマイクロコンピュータ58にも入力される。
ウォッシャスイッチ62は、車両のバッテリからウォッシャモータ64、第1モータ11及び第2モータ12に供給される電力をオン又はオフするスイッチである。ウォッシャスイッチ62は、例えば、前述のワイパスイッチ50を備えたレバー等の操作手段に一体に設けられ、当該レバー等を乗員が手元に引く等の操作によりオンになる。マイクロコンピュータ58は、ウォッシャスイッチ62がオンになると、ウォッシャモータ64及び第1モータ11を作動させる。マイクロコンピュータ58は、助手席側ワイパブレード36が下反転位置P2Pから上反転位置P1Pまで払拭する場合には、払拭範囲Z2を払拭するように、助手席側ワイパブレード36が上反転位置P1Pから下反転位置P2Pまで払拭する場合には、払拭範囲Z1を払拭するように第2モータ12を各々制御する。かかる制御により、ウィンドシールドガラス1の助手席側を広く払拭することが可能となる。
ウォッシャスイッチ62がオンになっている間は、ウォッシャ装置70が備えるウォッシャモータ64の回転でウォッシャポンプ66が駆動される。ウォッシャポンプ66はウォッシャ液タンク68内のウォッシャ液を運転席側ホース72A又は助手席側ホース72Bに圧送する。運転席側ホース72Aは、ウィンドシールドガラス1の運転席側の下方に設けられた運転席側ノズル74Aに接続されている。また、助手席側ホース72Bは、ウィンドシールドガラス1の助手席側の下方に設けられた助手席側ノズル74Bに接続されている。圧送されたウォッシャ液は、運転席側ノズル74A及び助手席側ノズル74Bからウィンドシールドガラス1上に噴射される。ウィンドシールドガラス1上に付着したウォッシャ液は、動作している運転席側ワイパブレード18及び助手席側ワイパブレード36によってウィンドシールドガラス1上の汚れと一緒に払拭される。
マイクロコンピュータ58は、ウォッシャスイッチ62がオンになっている間のみ動作するようにウォッシャモータ64を制御する。また、マイクロコンピュータ58は、ウォッシャスイッチ62がオフになっても運転席側ワイパブレード18及び助手席側ワイパブレード36が下反転位置P2D、P2Pに到達するまで動作を継続するように第1モータ11を制御する。さらにマイクロコンピュータ58は、運転席側ワイパブレード18及び助手席側ワイパブレード36が上反転位置P1D、P1Pに向かって払拭している際にウォッシャスイッチ62がオフになった場合には、運転席側ワイパブレード18及び助手席側ワイパブレード36が、第1モータ11の回転により上反転位置P1D、P1Pに到達するまで、払拭範囲Z2を払拭するように第2モータ12を制御する。
レインセンサ76は、例えば、ウィンドシールドガラス1の車室内側に設けられる光学センサの一種であり、ウィンドシールドガラス1表面の水滴を検知する。レインセンサ76は、一例として、赤外線の発光素子であるLED、受光素子であるフォトダイオード、赤外線の光路を形成するレンズ及び制御回路を含んでいる。LEDから放射された赤外線はウィンドシールドガラス1で全反射するが、ウィンドシールドガラス1の表面に水滴が存在すると赤外線の一部が水滴を透過して外部に放出されるため、ウィンドシールドガラス1での反射量が減少する。その結果、受光素子であるフォトダイオードに入る光量が減少する。かかる光量の減少に基づいて、ウィンドシールドガラス1表面の水滴を検知する。
車速センサ92は、車両の車輪の回転数を検知し、当該回転数を示す信号を出力するセンサである。車両ECU90は、車速センサ92が出力した信号と車輪の周長から車速を算出する。
車載カメラ94は、車両前方を撮影し、動画像のデータを取得する装置である。車両ECU90は、車載カメラ94で取得した動画像のデータを画像処理することにより、車両がカーブに差し掛かっている等を判定することが可能である。また、車両ECU90は、車載カメラ94で取得した動画像のデータの輝度から、車両前方の明るさを算出できる。
GPS装置は、上空にあるGPS衛星から受信した測位のための信号に基づいて車両の現在位置を算出する装置である。本実施の形態では、ワイパシステム100専用のGPS装置96を用いるが、車両がカーナビゲーションシステム等の他のGPS装置を備える場合には、当該他のGPS装置を用いてもよい。
操舵角センサ98は、一例としてステアリングの回転軸(図示せず)に設けられ、当該ステアリングの回転角度を検出するセンサである。
以下、図2〜8を用いて、本実施の形態に係るワイパ装置2の構成を説明する。図2、図4〜8に示したように、本実施の形態に係るワイパ装置2は、板状の中央フレーム3と、中央フレーム3に一端部が固定され、中央フレーム3から車両幅方向両側に延設された一対のパイプフレーム4、5とを備える。パイプフレーム4の他端部には、運転席側ワイパアーム17の運転席側ピボット軸15等を備えた第1ホルダ部材6が形成されている。また、パイプフレーム5の他端部には、助手席側ワイパアーム35の第2助手席側ピボット軸22等が設けられた第2ホルダ部材7が形成されている。ワイパ装置2は、中央フレーム3に設けられた支持部3Aで車両に支持されると共に、第1ホルダ部材6の固定部6A及び第2ホルダ部材7の固定部7Aの各々がボルト等により車両に締結されることにより、車両に固定される。
ワイパ装置2は、中央フレーム3の裏面(車室側に対向する面)に、ワイパ装置2を駆動させるための第1モータ11と第2モータ12とを備えている。第1モータ11の第1出力軸11Aは、中央フレーム3を貫通して中央フレーム3の表面(車両の外部側の面)に突出し、第1出力軸11Aの先端部には第1駆動クランクアーム13の一端が固定されている。第2モータ12の第2出力軸12Aは、中央フレーム3を貫通して中央フレーム3の表面に突出し、第2出力軸12Aの先端部には第2駆動クランクアーム14の一端が固定されている。
第1ホルダ部材6には、運転席側ピボット軸15が回転可能に支持され、運転席側ピボット軸15の基端部(図2の奥側)には運転席側揺動レバー16の一端が固定され、運転席側ピボット軸15の先端部(図2の手前側)には運転席側ワイパアーム17のアームヘッドが固定されている。図1に示したように、運転席側ワイパアーム17の先端部には、ウィンドシールドガラス1の運転席側を払拭するための運転席側ワイパブレード18が連結されている。
第1駆動クランクアーム13の他端と運転席側揺動レバー16の他端とは、第1連結ロッド19を介して連結されている。第1モータ11が駆動されると、第1駆動クランクアーム13は回転し、その回転力が第1連結ロッド19を介して運転席側揺動レバー16に伝達されて運転席側揺動レバー16を搖動させる。運転席側揺動レバー16が搖動されることにより運転席側ワイパアーム17も搖動し、運転席側ワイパブレード18が下反転位置P2Dと上反転位置P1Dとの間の払拭範囲H1を払拭する。
図3は、図2のA−A線に沿った第2ホルダ部材7の断面図である。図3に示したように、第2ホルダ部材7には、第1助手席側ピボット軸21が第1軸線L1を中心として回転可能に支持させると共に、第2助手席側ピボット軸22が第2軸線L2を中心として回転可能に支持されている。本実施の形態では、第1軸線L1と第2軸線L2とが同一直線L(同心)上に配置されている。なお、図3は、図2、図4〜8に示されている防水カバーKを外した状態を示している。
第2ホルダ部材7には、筒状部7Bが形成され、筒状部7Bの内周側には軸受23を介して第1助手席側ピボット軸21が回転可能に支持されている。第1助手席側ピボット軸21は筒状に形成され、第1助手席側ピボット軸21の内周側には軸受24を介して第2助手席側ピボット軸22が回転可能に支持されている。
第1助手席側ピボット軸21の基端部には、第1助手席側揺動レバー25の一端が固定され、第1助手席側ピボット軸21の先端部には、第1駆動レバー26の一端が固定されている。図2に示したように、第1助手席側揺動レバー25の他端と運転席側揺動レバー16の他端とは、第2連結ロッド27により連結されている。従って、第1モータ11が駆動されて運転席側揺動レバー16搖動すると、第2連結ロッド27が駆動力を第1助手席側揺動レバー25に伝達し、第1助手席側揺動レバー25と共に、第1駆動レバー26を第1軸線L1周りに揺動(回転)させる。
図3に示したように、第2助手席側ピボット軸22は、第1助手席側ピボット軸21よりも長く形成され、第2助手席側ピボット軸22の基端部及び先端部が第1助手席側ピボット軸21から軸方向に突出し、第2助手席側ピボット軸の基端部には、第2助手席側揺動レバー28の一端が固定され、第2助手席側ピボット軸22の先端部には、第2駆動レバー29の一端が固定されている。
第2駆動クランクアーム14の他端と第2助手席側揺動レバー28の他端とは、第3連結ロッド31によって連結されている。従って、第2モータ12が駆動されると、第2駆動クランクアーム14が回転し、第3連結ロッド31が第2駆動クランクアーム14の駆動力を第2助手席側揺動レバー28に伝達し、第2助手席側揺動レバー28と共に、第2駆動レバー29を揺動(回転)させる。前述のように第1助手席側ピボット軸21及び第2助手席側ピボット軸22は同軸に設けられているが、第1助手席側ピボット軸21及び第2助手席側ピボット軸22は互いには連動しておらず、第1助手席側ピボット軸21及び第2助手席側ピボット軸22は、各々独立して回転する。
図2、図4〜8に示したように、ワイパ装置2は、第1駆動レバー26の他端側にある第3軸線L3を中心として回転可能に基端部が連結された第1従動レバー32を備える。
ワイパ装置2は、第1従動レバー32の先端側にある第4軸線L4を中心として回転可能に基端部が連結されると共に、第2駆動レバー29の他端側にある第5軸線L5を中心として回転可能に先端側が連結された第2従動レバーであるアームヘッド33を備える。アームヘッド33は、当該アームヘッド33の先端に基端部が固定されるリテーナ34と共に助手席側ワイパアーム35を構成する。助手席側ワイパアーム35の先端部には、ウィンドシールドガラス1の助手席側を払拭するための助手席側ワイパブレード36が連結されている。
第1駆動レバー26、第2駆動レバー29、第1従動レバー32及びアームヘッド33は、第1軸線L1(第2軸線L2)から第3軸線L3までの長さと、第4軸線L4から第5軸線L5までの長さが同じになるように連結されている。第1駆動レバー26、第2駆動レバー29、第1従動レバー32及びアームヘッド33は、第3軸線L3から第4軸線L4までの長さと、第1軸線L1(第2軸線L2)から第5軸線L5までの長さが同じになるように連結されている。従って、第1駆動レバー26とアームヘッド33とが平行を保持し、かつ第2駆動レバー29と第1従動レバー32とが平行を保持することになり、第1駆動レバー26、第2駆動レバー29、第1従動レバー32及びアームヘッド33は、略平行四辺形状のリンク機構を構成する。
第5軸線L5は、助手席側ワイパアーム35が動作する際の支点であり、助手席側ワイパアーム35は、第1モータ11の駆動力により、第5軸線L5を中心として回転することによりウィンドシールドガラス1上を往復動作する。また、第2モータ12は、第1駆動レバー26、第2駆動レバー29、第1従動レバー32及びアームヘッド33で構成される略平行四辺形状のリンク機構を介して、第5軸線L5を、図4〜6に示したように、図2、図7及び図8の場合よりもウィンドシールドガラス1の上方に移動させる。かかる第5軸線L5の移動により、助手席側ワイパアーム35は見かけ上伸長される。従って、第1モータ11と共に第2モータ12が動作することにより、助手席側ワイパブレード36は払拭範囲Z2を払拭する。
第2モータ12が動作せずに第1モータ11のみが動作する場合には、第5軸線L5は図2、図7及び図8に示した位置(以下、「第1位置」と称する)から動かない。従って、助手席側ワイパアーム35は、位置が変化しない第5軸線L5を中心に略円弧状の軌跡を描きながら下反転位置P2Pと上反転位置P1Pの間を動作し、助手席側ワイパブレード36は略扇形の払拭範囲Z1を払拭する。
本実施の形態では、ウィンドシールドガラス1を広く払拭することを要する場合には、助手席側ワイパブレード36が下反転位置P2Pから上反転位置P1Pに動作する往動時に、払拭範囲Z2を払拭するように第1モータ11及び第2モータ12を各々制御する。そして、上反転位置P1Pで反転した助手席側ワイパブレード36が下反転位置P2Pに向かって動作する復動時に、払拭範囲Z1を払拭するように第1モータ11及び第2モータ12を各々制御する。助手席側ワイパブレード36が下反転位置P2Pと上反転位置P1Pとの間を往復する際に、往動時には払拭範囲Z2を、復動時には払拭範囲Z1を、各々払拭することにより、ウィンドシールドガラス1の幅広い範囲を払拭できる。または、助手席側ワイパブレード36が下反転位置P2Pと上反転位置P1Pとの間を往復する際に、往動時には払拭範囲Z1を、復動時には払拭範囲Z2を、各々払拭することによっても、ウィンドシールドガラス1の幅広い範囲を払拭できる。または、往動時及び復動時に、払拭範囲Z2を払拭するようにしてもよい。
以下、本実施の形態に係るワイパ装置2の動作について説明する。本実施の形態では、運転席側ワイパアーム17及び運転席側ワイパブレード18は、第1モータ11の回転に従い、運転席側ピボット軸15を中心として動作するのみなので、以下では、助手席側ワイパアーム35及び助手席側ワイパブレード36の動作について詳述する。
図2は、助手席側ワイパブレード36が下反転位置P2Pに位置している状態であり、助手席側ワイパアーム35が停止位置にある状態を示している。かかる状態で、前述のウォッシャスイッチ62又は拡大モードスイッチがオンになると、制御回路52の制御により第1モータ11の第1出力軸11Aが図4に示した回転方向CC1で回転することにより、第1駆動レバー26が回転を開始し、助手席側ワイパアーム35は、第5軸線L5を中心として回転動作を開始する。同時に、第2モータ12の第2出力軸12Aも、図4に示した回転方向CC2での回転を開始する。なお、本実施の形態では、第1出力軸11Aの回転方向CC1での回転、及び第2出力軸12Aの回転方向CC2での回転を、各々の出力軸における正回転とする。
図4は、助手席側ワイパブレード36がウィンドシールドガラス1を途中(往動行程の略1/4)まで払拭した状態を示している。本実施の形態では、第1モータ11が回転方向CC1での回転を開始すると、第2モータ12の回転方向CC2での回転による駆動力が第2駆動レバー29に伝達される。第2モータ12の駆動力が伝達された第2駆動レバー29は、動作方向CW3に動作し、助手席側ワイパアーム35の支点である第5軸線L5をウィンドシールドガラス1の助手席側の上方に向けて移動させる。
図5は、第1出力軸11Aが0°と第1所定角度との間の中間回転角度まで回転したことにより、第1駆動レバー26がさらに回転され、助手席側ワイパブレード36が下反転位置P2Pと上反転位置P1Pとの間の行程(往動行程)の略中間点に達した場合を示している。図5では、第2モータ12の第2出力軸12Aは、図4で示した回転方向CC2で第2所定回転角度まで回転した状態でもある。第2出力軸12Aの正回転での回転角度が最大となったことにより、助手席側ワイパアーム35の支点である第5軸線L5は、第2駆動クランクアーム14、第3連結ロッド31、第2助手席側揺動レバー28及び第2駆動レバー29により、最も上方の位置(第2位置)まで持ち上げられる。その結果、助手席側ワイパブレード36の先端部は、図1に示したように、ウィンドシールドガラス1の助手席側の上方の角に近い位置まで移動される。なお、前述の中間回転角度は、第1所定回転角度の半分程度であるが、ウィンドシールドガラス1の形状等に応じて、個別に設定する。なお、第2位置は、各々の拡大率において第5軸線L5が最も上方に配置される位置である。詳説すると、第2位置は、助手席側ワイパブレードが払拭範囲Z1より広い範囲(例えば、払拭範囲Z2)を払拭する際に、第1出力軸11Aが0°と第1所定角度との間の中間回転角度まで回転した時の第5軸線L5が配置される位置である。
図6は、第1駆動レバー26がさらに回転されたことにより、助手席側ワイパブレード36が下反転位置P2Pと上反転位置P1Pとの間の行程(往動行程)の略3/4に達した場合を示している。図6では、第1モータ11の第1出力軸11Aの回転方向は図4、5の場合と同じだが、第2モータ12の第2出力軸12Aは、図4、5の場合とは逆の回転方向CW2で回転する(逆回転)。第2出力軸12Aが回転方向CW2で回転することにより、第2駆動レバー29は動作方向CC3で動作し、助手席側ワイパアーム35の支点である第5軸線L5は第2位置から下方へ移動される。その結果、助手席側ワイパブレード36は、その先端部が図1に示した払拭範囲Z2上方の破線で示された軌跡を描きながらウィンドシールドガラス1上を移動し、払拭範囲Z2を払拭する。
図7は、第1モータ11の第1出力軸11Aが第1所定回転角度まで正回転し、かつ第2モータ12の第2出力軸12Aが第2所定回転角度で逆回転した場合を示している。第1モータ11の第1出力軸11Aの正回転での回転角度が最大となったことにより、運転席側ワイパアーム17及び運転席側ワイパブレード18は、上反転位置P1Dに到達する。また、第2モータ12の第2出力軸12Aは、図5の示した状態(第2出力軸12Aが正回転にて第2所定回転角度に達した状態)から、第2所定回転角度で逆回転したことにより、助手席側ワイパアーム35の支点である第5軸線L5は、図2に示した第2モータ12の第2出力軸12Aが正回転を開始する前の位置である第1位置に戻っている。その結果、助手席側ワイパアーム35及び助手席側ワイパブレード36は、第2モータ12を駆動しない場合の払拭範囲Z1と同じ上反転位置P1Pに到達する。
図8は、運転席側ワイパアーム17及び運転席側ワイパブレード18並びに助手席側ワイパアーム35及び助手席側ワイパブレード36が上反転位置P1D、P1Pから下反転位置P2D、P2Pに移動する復動時の状態(復動行程)を示している。復動時では、第1モータ11の第1出力軸11Aは逆回転し、図2、図4〜7の場合とは逆方向の回転方向CW1で回転する。しかしながら、第2モータ12の第2出力軸12Aは回転せず、従って助手席側ワイパアーム35の支点である第5軸線L5は第1位置から移動しないので、第1モータ11の第1出力軸11Aが逆回転することにより、助手席側ワイパアーム35は略円弧状の軌跡を描く。その結果、助手席側ワイパアーム35の先端に連結された助手席側ワイパブレード36は、払拭範囲Z1を払拭する。
図9は、本実施の形態に係るワイパシステム100の回路を模式的に示した回路図である。図9に示すように、ワイパシステム100は、制御回路52と駆動回路56とを含んでいる。
制御回路52は、前述のようにマイクロコンピュータ58とメモリ60を有し、マイクロコンピュータ58には、車両ECU90(図示せず)を介して、ワイパスイッチ50、方向指示器スイッチ54、ウォッシャスイッチ62、レインセンサ76、車速センサ92、車載カメラ94、GPS装置96、操舵角センサ98が各々接続されている。
駆動回路56は、第1モータ11を駆動させるための第1プリドライバ104及び第1モータ駆動回路108、第2モータ12を駆動させるための第2プリドライバ106及び第2モータ駆動回路110を備えている。また駆動回路56は、ウォッシャモータ64を駆動させるための、リレー駆動回路78、FET駆動回路80及びウォッシャモータ駆動回路57を有している。
制御回路52のマイクロコンピュータ58は、第1プリドライバ104を介して第1モータ駆動回路108を構成するスイッチング素子をオンオフさせることにより第1モータ11の回転を、第2プリドライバ106を介して第2モータ駆動回路110のスイッチング素子をオンオフさせることにより第2モータ12の回転を、各々制御する。また、マイクロコンピュータ58は、リレー駆動回路78及びFET駆動回路80を制御することによりウォッシャモータ64の回転を制御する。
第1モータ11及び第2モータ12がブラシ付きDCモータの場合、第1モータ駆動回路108及び第2モータ駆動回路110は、各々4個のスイッチング素子を含む。スイッチング素子は、一例としてN型のFET(電界効果トランジスタ)である。
図9に示すように、第1モータ駆動回路108は、FET108A〜108Dを含んでいる。FET108Aは、ドレインが電源(+B)に接続され、ゲートが第1プリドライバ104に接続され、ソースが第1モータ11の一端部に接続されている。FET108Bは、ドレインが電源(+B)に接続され、ゲートが第1プリドライバ104に接続され、ソースが第1モータ11の他端部に接続されている。FET108Cは、ドレインが第1モータ11の一端部に接続され、ゲートが第1プリドライバ104に接続され、ソースが接地されている。FET108Dは、ドレインが第1モータ11の他端部に接続され、ゲートが第1プリドライバ104に接続され、ソースが接地されている。
第1プリドライバ104は、マイクロコンピュータ58からの制御信号に従ってFET108A〜108Dのゲートに供給する制御信号を切り替えることで、第1モータ11の駆動を制御する。すなわち、第1プリドライバ104は、第1モータ11の第1出力軸11Aを所定方向に回転(正回転)させる場合には、FET108AとFET108Dの組をオンさせ、第1モータ11の第1出力軸11Aを所定方向と逆方向に回転(逆回転)させる場合には、FET108BとFET108Cの組をオンさせる。また、第1プリドライバ104は、マイクロコンピュータ58からの制御信号に基づいて、FET108A及びFET108Dを断続的にオンオフさせるPWMを行う。
第1プリドライバ104はPWMにより、FET108A及びFET108Dのオンオフに係るデューティ比を変化させることにより、第1モータ11の正回転での回転速度を制御する。当該デューティ比が大きくなれば、正回転時に第1モータ11の端子に印加される電圧の実効値が高くなり、第1モータ11の回転速度は大きくなる。
同様に、第1プリドライバ104はPWMにより、FET108B及びFET108Cのオンオフに係るデューティ比を変化させることにより、第1モータ11の逆回転での回転速度を制御する。当該デューティ比が大きくなれば、逆回転時に第1モータ11の端子に印加される電圧の実効値は高くなり、第1モータ11の回転速度は大きくなる。
第2モータ駆動回路110は、FET110A〜110Dを含んでいる。FET110Aは、ドレインが電源(+B)に接続され、ゲートが第2プリドライバ106に接続され、ソースが第2モータ12の一端部に接続されている。FET110Bは、ドレインが電源(+B)に接続され、ゲートが第2プリドライバ106に接続され、ソースが第2モータ12の他端部に接続されている。FET110Cは、ドレインが第2モータ12の一端部に接続され、ゲートが第2プリドライバ106に接続され、ソースが接地されている。FET110Dは、ドレインが第2モータ12の他端部に接続され、ゲートが第2プリドライバ106に接続され、ソースが接地されている。
第2プリドライバ106は、マイクロコンピュータ58からの制御信号に従ってFET110A〜110Dのゲートに供給する制御信号を切り替えることで、第2モータ12の駆動を制御する。すなわち、第2プリドライバ106は、第2モータ12の第2出力軸12Aを所定方向に回転(正回転)させる場合には、FET110AとFET110Dの組をオンさせ、第2モータ12の第2出力軸12Aを所定方向と逆方向に回転(逆回転)させる場合には、FET110BとFET110Cの組をオンさせる。また、第2プリドライバ104は、マイクロコンピュータ58からの制御信号に基づいて、前述の第1プリドライバ104のようなPWMを行うことにより、第2モータ12の回転速度を制御する。
第1モータ11の減速機構内における第1出力軸11Aの出力軸端部112には、2極のセンサマグネット112Aが固定され、センサマグネット112Aに対向するように第1絶対角センサ114が設けられている。
第2モータ12の減速機構内における第2出力軸12Aの出力軸端部116には、2極のセンサマグネット116Aが固定され、センサマグネット116Aに対向するように第2絶対角センサ118が設けられている。
第1絶対角センサ114はセンサマグネット112Aの磁界を、第2絶対角センサ118はセンサマグネット116Aの磁界を、各々検出し、検出した磁界の強さに応じた信号を出力する。マイクロコンピュータ58は、第1絶対角センサ114及び第2絶対角センサ118が各々出力した信号に基づいて、第1モータ11の第1出力軸11A及び第2モータ12の各々の回転角度、回転位置、回転方向及び回転速度を算出する。
第1モータ11の第1出力軸11Aの回転角度からは、運転席側ワイパブレード18の下反転位置P2Dと上反転位置P1Dとの間での位置が算出できる。また、第2モータ12の第2出力軸12Aの回転角度からは、助手席側ワイパアーム35の見かけの伸長の程度(拡大の程度)が算出できる。マイクロコンピュータ58は、第1出力軸11Aの回転角度から算出した運転席側ワイパブレード18の下反転位置P2Dと上反転位置P1Dとの間での位置に基づいて、第2出力軸12Aの回転角度を制御することにより、第1モータ11と第2モータ12の各々の動作を同期させる。一例として、メモリ60に、運転席側ワイパブレード18の下反転位置P2Dと上反転位置P1Dとの間での位置(又は第1出力軸11Aの回転角度)と第2出力軸12Aの回転角度とを対応付けたマップ(例えば、後述する第2出力軸回転角度マップ)を予め記憶させ、当該マップに従って、第1出力軸11Aの回転角度に応じて第2出力軸12Aの回転角度を制御する。
ウォッシャモータ駆動回路57は、2個のリレーRLY1、RLY2を内蔵したリレーユニット84、2個のFET86A、86Bを含んでいる。リレーユニット84のリレーRLY1、RLY2のリレーコイルはリレー駆動回路78に各々接続されている。リレー駆動回路78はリレーRLY1、RLY2のオンオフ(リレーコイルの励磁/励磁停止)を切り替える。リレーRLY1、RLY2は、リレーコイルが励磁されていない間は、共通端子84C1、84C2が第1端子84A1、84A2と各々接続している状態(オフ状態)を維持し、リレーコイルが励磁されると共通端子84C1、84C2を第2端子84B1、84B2に各々接続する状態に切り替わる。リレーRLY1の共通端子84C1はウォッシャモータ64の一端に接続されており、リレーRLY2の共通端子84C2はウォッシャモータ64の他端に接続されている。また、リレーRLY1、RLY2の第1端子84A1、84A2の各々はFET86Bのドレインに接続され、リレーRLY1、RLY2の第2端子84B1、84B2の各々は電源(+B)に接続されている。
FET86BはゲートがFET駆動回路80に接続され、ソースが接地されている。FET86Bのオンオフに係るデューティ比はFET駆動回路80によって制御される。また、FET86Bのドレインと電源(+B)との間にはFET86Aが設けられている。FET86Aは、ゲートに制御信号が入力されないのでオンオフの切り替えは行われず、寄生ダイオードをサージの吸収に用いる目的で設けられている。
リレー駆動回路78及びFET駆動回路80は、2個のリレーRLY1、RLY2とFET86Bとのオンオフを切り替えることで、ウォッシャモータ64の駆動を制御する。すなわち、ウォッシャモータ64の出力軸を所定方向に回転(正回転)させる場合、リレー駆動回路78はリレーRLY1をオンさせ(リレーRLY2はオフ)、FET駆動回路80は所定のデューティ比でFET86Bをオンさせる。上記の制御により、ウォッシャモータ64の出力軸の回転速度が制御される。
以下、本実施の形態に係るワイパシステム100の制御について説明する。図10は、本実施の形態における第1出力軸11Aの回転角度に応じた第2出力軸12Aの回転角度を定めた第2出力軸回転角度マップの一例を示している。図10の横軸は第1出力軸11Aの回転角度である第1出力軸回転角度θAであり、縦軸は第2出力軸12Aの回転角度である第2出力軸回転角度θBであり、その最大値は第2所定回転角度θ2となる。マイクロコンピュータ58は、第1モータ11の第1出力軸11Aが回転を始めると、第1絶対角センサ114で検知した第1出力軸11Aの回転角度と第2出力軸回転角度マップとを照合する。かかる照合により、第1絶対角センサ114で検知した第1出力軸回転角度θAに対応する第2出力軸回転角度θBを算出し、算出した第2出力軸回転角度θBになるように第2モータ12の第2出力軸12Aの回転角度を制御する。
図10には、曲線190と、曲線192と、曲線194とが記載されている。曲線190は、第1出力軸11Aの回転角度に対応して、第2出力軸12Aの回転角度が遅延なしに変化する理想的な場合を示している。通常は、曲線190で示された第1出力軸回転角度θAに対する第2出力軸回転角度θBを、第2モータ12の回転制御の指令値とする。なお、図10に示した曲線190は、後述する曲線192、194と共に、第1出力軸回転角度θAが、第1所定回転角度θ1に到達した場合、すなわち、助手席側ワイパブレード36が上反転位置P1Pに到達した場合の第2出力軸回転角度θBは、0°よりも大きい角度θ3を示すように設定されている。
しかしながら、実機では、リンク機構による駆動力伝達の遅れ、制御回路52における素子の動作に要する時間による制御処理の遅れ等により、必ずしも理想値を示す曲線190のように第1出力軸回転角度θAと第2出力軸回転角度θBとが対応しない。
上述の遅れの影響を排除して第1出力軸回転角度θAと第2出力軸回転角度θBとを対応させるには、第2出力軸回転角度θBの制御のタイミングを、曲線190が示す場合よりも早めればよい。
時間経過と共に第1出力軸回転角度θAが大きくなる往動時では、検出された第1出力軸回転角度θAに補正値を加算して得られた角度に対応する曲線190上の第2出力軸回転角度θBとなるように第2出力軸の回転角度を制御することによって、第2出力軸回転角度θBの制御のタイミングを、曲線190が示す場合よりも早めることができる。
上述のように、本実施の形態では、検出された第1出力軸回転角度θAに補正値を加算して第1出力軸回転角度θAの時系列での変化を先取りし、実際の第1出力軸回転角度θAが示す制御のタイミングよりも第2出力軸回転角度θBの制御のタイミングを早めている。このように、第1出力軸回転角度θAの時系列での変化を先取りして第2出力軸回転角度θBの制御のタイミングを早めることを、本実施の形態では便宜上、第1出力軸回転角度θAの進角と表現する。なお、補正値は、第2出力軸回転角度θBの制御のタイミングを最適化するための数値である。補正値は、ワイパ装置2の仕様等によって異なるのみならず、第1出力軸回転角度θAの変化に伴っても変動するので、設計時のシミュレーション、実機を用いた試験等を通じて第1出力軸回転角度θAの変化毎に具体的に決定する。
図10の曲線192は、助手席側ワイパアーム35が下反転位置P2Pから上反転位置P1Pに動作する往動時において、検出された第1出力軸回転角度θAに対応する第2出力軸回転角度θBの制御のタイミングを、曲線190の場合よりも早めたマップの一例を示している。曲線192は、検出された第1出力軸回転角度θAに第2出力軸回転角度θBの制御のタイミングを最適化するための補正値を加算して得られた角度に対する曲線190上の第2出力軸回転角度θBを、検出された第1出力軸回転角度θAに対してプロットしたものである。
補正値は、第1出力軸回転角度θAが0°の場合、すなわち助手席側ワイパブレード36が下反転位置P2Pに位置している場合と、第1出力軸回転角度θAが第1所定回転角度θ1の場合、すなわち助手席側ワイパブレード36が上反転位置P1Pに位置している場合と、では「0」になるように定める。助手席側ワイパブレード36が下反転位置P2P及び上反転位置P1Pに位置している場合に補正値を「0」とするのは、助手席側ワイパブレード36が下反転位置P2P又は上反転位置P1Pに到達した場合に、助手席側ワイパアーム35の支点である第5軸線L5を第1位置に復帰させるためである。助手席側ワイパブレード36が下反転位置P2P及び上反転位置P1Pに位置している場合に補正値を「0」とすることで、図10に示したように、第1出力軸回転角度θAが0°及び第1所定回転角度θ1の場合には、曲線190と、曲線190に対して第1出力軸回転角度θAを進角させた曲線192とにおける第2出力軸回転角度θBが一致する。なお、後述する曲線194も、第1出力軸回転角度θAが0°及び第1所定回転角度θ1の場合には、第2出力軸回転角度θBが曲線190と一致する。
図11は、曲線190から曲線192を得るための補正値の一例を示した概略図である。図11に示した補正値は、助手席側ワイパブレード36が下反転位置P2P及び上反転位置P1Pに位置している場合に「0」を示し、助手席側ワイパブレード36が払拭動作中に最大値ΔCを示す。助手席側ワイパブレード36が下反転位置P2P及び上反転位置P1Pに位置している場合は、助手席側ワイパアーム35の伸縮機構は伸縮を開始していないので、補正値を「0」に定めておく。例えば、助手席側ワイパブレード36が下反転位置P2Pから払拭動作を開始した場合には、補正値を最大値であるΔCまで迅速に増大させ、助手席側ワイパブレード36が2つの反転位置の間を払拭動作する際に最大値ΔCを維持させて第2出力軸回転角度θBの制御のタイミングを最適化させる。そして、助手席側ワイパブレード36が上反転位置P1Pに近づいた場合には、補正値を迅速に減少させ、助手席側ワイパブレード36が上反転位置P1Pに到達した際に補正値を「0」とする。
図10に示したように、第1出力軸回転角度θAが0°と第1所定回転角度θ1との間の中間回転角度θmに達するまでは、同じ第1出力軸回転角度θAに対する第2出力軸回転角度θBは、曲線192が曲線190よりも大きくなっている。リンク機構による駆動力伝達の遅れ及び制御回路52における制御処理の遅れを見越して、曲線190を第1出力軸回転角度θAついて前述の補正値で適切に進角させて曲線192を定義することにより、第1出力軸11Aの回転角度に対する第2出力軸12Aの回転角度の同期の遅れを補正することが可能になる。
図10の曲線194は、助手席側ワイパアーム35が上反転位置とP1Pから下反転位置P2Pに動作する復動時において、検出された第1出力軸回転角度θAに対応する第2出力軸回転角度θBの制御のタイミングを、曲線190の場合よりも早めたマップの一例を示している。復動時に、第1出力軸11Aは往動時とは逆回転するので、第1出力軸11Aの回転角度は、第1所定回転角度θ1から減少し、下反転位置P2Pに助手席側ワイパブレード36が達すると0°になる。従って、復動時には図10に示したマップを第1所定回転角度θ1から0°に向かって適用していく。
復動時にも、リンク機構による駆動力伝達の遅れ、制御回路52における素子の動作に要する時間による制御処理の遅れ等が問題になり、助手席側ワイパアーム35の伸長が曲線190に示した理想値(指令値)のようにはならない場合がある。かかる遅れにより、助手席側ワイパブレード36が上反転位置P1Pから下反転位置P2Pに向けて払拭動作をする場合には、第1出力軸回転角度θAの減少に助手席側ワイパアーム35の伸長及び収縮が追いつかなくなる。
上述のように、進角という単語は制御のタイミングを速めるという概念を表現したものであるから、時間経過と共に第1出力軸回転角度θAが減少する復動時では、検出された第1出力軸回転角度θAから第2出力軸回転角度θBの制御のタイミングを最適化するための補正値を減算して得られた角度に対する曲線190上の第2出力軸回転角度θBとなるように第2出力軸の回転角度を制御することによって、助手席側ワイパアーム35の伸長・収縮のタイミングを速めることが可能となる。従って、ステップ124では、検出された第1出力軸回転角度θAから図11に示した補正値を減算することによって進角させる。検出された第1出力軸回転角度θAから補正値を減算して、第1出力軸回転角度θAの時系列での変化を先取りし、実際の第1出力軸回転角度θAが示す制御のタイミングよりも第2出力軸回転角度θBの制御のタイミングを早めることを、本実施の形態では便宜上、第1出力軸回転角度θAの進角と表現する。なお、補正値は、ワイパ装置2の仕様等によって異なるのみならず、第1出力軸回転角度θAの変化に伴っても変動するので、設計時のシミュレーション、実機を用いた試験等を通じて第1出力軸回転角度θAの変化毎に具体的に決定する。
図10の曲線194は、助手席側ワイパアーム35が上反転位置P1Pから下反転位置P2Pに動作する復動時において、検出された第1出力軸回転角度θAに対応する第2出力軸回転角度θBの制御のタイミングを、曲線190の場合よりも早めたマップの一例を示している。曲線194は、検出された第1出力軸回転角度θAに補正値を減算して得られた角度に対応する曲線190上の第2出力軸回転角度θBを、検出された第1出力軸回転角度θAに対してプロットしたものである。
補正値は、図11に示したように、助手席側ワイパブレード36が上反転位置P1Pから払拭動作を開始した場合には、補正値を最大値であるΔCまで迅速に増大させて、第2出力軸回転角度θBの制御のタイミングを最適化させる。そして、助手席側ワイパブレード36が下反転位置P2Pに近づいた場合には、補正値を迅速に減少させ、助手席側ワイパブレード36が下反転位置P2Pに到達した際に補正値を「0」とする。
図10に示したように、第1出力軸回転角度θAが第1所定回転角度θ1から中間回転角度θmに達するまでは、同じ第1出力軸回転角度θAに対する第2出力軸回転角度θBは、曲線194の方が曲線190よりも大きくなっている。リンク機構による駆動力伝達の遅れ及び制御回路52における制御処理の遅れを見越して、曲線190を第1出力軸回転角度θAついて適切に進角させて曲線194を定義することにより、第1出力軸11Aの回転角度に対する第2出力軸12Aの回転角度の同期の遅れを補正することが可能になる。
図12は、本実施の形態におけるワイパ装置2の回転角度進角処理の一例を示したフローチャートである。図12は、助手席側ワイパブレード36を下反転位置P2Pから上反転位置P1Pに払拭動作させる往動時に拡大払拭させ、助手席側ワイパブレード36を上反転位置P1Pから下反転位置P2Pに払拭動作させる復動時に通常の払拭動作をさせる場合を示している。
ステップ110では、第1出力軸11Aの回転角度(第1出力軸回転角度θA)と回転方向とを第1絶対角センサ114を用いて検出する。ステップ112では、回転方向から往動開始か否かを判定し、肯定判定の場合には手順をステップ114に移行させ、否定判定の場合にはリターンする。
ステップ114では、第1絶対角センサ114によって検出された第1出力軸回転角度θAに図11の補正値を加算して進角させる。
ステップ116では、進角させた第1出力軸回転角度θAに対応する第2出力軸回転角度θBを算出してリターンする。ステップ114で第1出力軸回転角度θAに補正値を加算して進角させた場合には、図10の曲線190を用いて第2出力軸回転角度θBを算出する。なお、ステップ114及びステップ116の処理は、図10の曲線192を使用してもよい。かかる場合には、検出された第1出力軸回転角度θAに図10の曲線192を適用して第2出力軸回転角度θBを算出する。
図12では、往動時に拡大払拭させ、復動時に通常の払拭動作をさせる場合を示したが、往動時に通常の払拭動作をさせ、復動時に拡大払拭させる場合には、図13に示したような処理を行う。図13は、本実施の形態におけるワイパ装置2の回転角度進角処理の他の一例を示したフローチャートである。
ステップ120では、第1出力軸回転角度θAと第一出力軸の回転方向とを第1絶対角センサ114を用いて検出する。ステップ122では、回転方向から復動開始か否かを判定し、肯定判定の場合には手順をステップ124に移行させ、否定判定の場合にはリターンする。
ステップ124では、検出された第1出力軸回転角度θAから図11の補正値を減算することによって進角させる。補正値は、ワイパ装置2の仕様等によって異なるので、設計時のシミュレーション、実機を用いた試験等を通じて具体的に決定する。
ステップ126では、進角させた第1出力軸回転角度θAに対応する第2出力軸回転角度θBを算出してリターンする。ステップ124で第1出力軸回転角度θAから補正値を減算して進角させた場合には、図10の曲線190を用いて第2出力軸回転角度θBを算出する。なお、ステップ124及びステップ126の処理は、図10の曲線194を使用してもよい。かかる場合には、検出された第1出力軸回転角度θAに図10の曲線194を適用して第2出力軸回転角度θBを算出する。
以上説明したように、本実施の形態では、第1絶対角センサ114によって検出された第1出力軸の回転角度に対応する第2出力軸12Aの回転制御のタイミングを速めることにより、助手席側ワイパアーム135の往復動作に同期させる助手席側ワイパアーム135の伸長及び収縮における遅延を低減させることが可能になる。
なお、本実施の形態は、第1モータ11の第1出力軸11A及び第2モータ12の第2出力軸12Aが正逆(往復)回転可能に制御されていたが、これに限定されることはない。例えば、第1出力軸11A及び第2出力軸12Aの一方が一方向に回転するものでもよい。
なお、本実施の形態は、第1モータ11の第1出力軸11Aの回転により、運転席側ワイパブレード18及び助手席側ワイパブレード36を上反転位置P1D、P1Pと下反転位置P2D、P2Pとの間で移動させていたが、これに限定されることはない。例えば、第1モータ11として「運転席側第1モータ」と「助手席側第1モータ」とを備え、運転席側第1モータの回転によって運転席側ワイパブレード18を上反転位置P1Dと下反転位置P2Dとの間で移動させ、助手席側第1モータの回転によって助手席側ワイパブレード36を上反転位置P1Pと下反転位置P2Pとの間で移動させる構造でもよい。
なお、本実施の形態では、運転席側ワイパブレード18と助手席側ワイパブレード36とが下反転位置P2D、P2Pにて車幅方向に重ならない構造になっていたが、これに限定されることはない。例えば、助手席側ワイパブレード36の運転席側ワイパブレード18側を長く設定してもよい。換言すると、助手席側ワイパブレード36の運転席側ワイパブレード18側が、当該運転席側ワイパブレード18の助手席側ワイパブレード36側と重なるように助手席側ワイパブレード36の長さを設定してもよい。これにより、往復動時に払拭範囲Z2を払拭する際に、ウィンドシールドガラスの中央下側に残る払拭不能領域を少なくすることができる。
なお、本実施の形態では、第1出力軸11Aの所定回転角度における中間角度付近までの間で助手席側ワイパアーム35(助手席側ワイパブレード36)を伸長させ、中間角度付近から所定回転角度までの間で助手席側ワイパアーム35(助手席側ワイパブレード36)を縮小させる制御を行ったが、これに限定されることはない。例えば、助手席側ワイパブレード36が下反転位置P2Pから上反転位置P1Pに向かって払拭する際(往動払拭時)に、助手席側ワイパアーム35が徐々に伸長するように制御してもよい。
なお、本実施の形態では、第1モータ11の第1出力軸11Aの回転角度と第2モータ12の第2出力軸12Aの回転角度とを用いた実施の形態を説明したが、これに代えて第1出力軸11Aの回転位置と第2出力軸12Aの回転位置とを用いたものとしてもよい。
なお、本実施の形態では、図10に示すように、第1出力軸回転角度θAが第1所定回転角度θ1に到達した場合、すなわち、助手席側ワイパブレード36が上反転位置P1Pに到達した場合の第2出力軸回転角度θBをθ3としたが、これに限定されることはない。例えば、助手席側ワイパブレード36が上反転位置P1Pに到達した場合の第2出力軸回転角度θBを0°としてもよい。
なお、本実施の形態では、図11で示すような補正値としたが、これに限定されることはない。例えば、補正値を第1出力軸回転角度θAの変化に影響されない定数としてもよい。0°から第1所定回転角度θ1までの第1出力軸回転角度θAの各々に一律に定数である補正値を加算することによって、制御を簡易迅速に行うことができる。