以下に、図面を参照しながら本開示を実施するための複数の形態を説明する。各形態において先行する形態で説明した事項に対応する部分には同一の参照符号を付して重複する説明を省略する場合がある。各形態において構成の一部のみを説明している場合は、構成の他の部分については先行して説明した他の形態を適用することができる。各実施形態で具体的に組み合わせが可能であることを明示している部分同士の組み合わせばかりではなく、特に組み合わせに支障が生じなければ、明示していなくても実施形態同士を部分的に組み合せることも可能である。
<第1実施形態>
第1実施形態について図1~図4を参照しながら説明する。明細書に明示の目的を達成可能な電池管理装置は、ハイブリッド自動車、電気自動車、燃料電池車等の車両に搭載された二次電池の管理に適用することができる。車両には、乗用車、バス、建設作業車、農業機械車両等が含まれる。二次電池には、リチウムイオン二次電池、ニッケル水素二次電池、有機ラジカル電池等を用いることができる。
図1には、電池装置200に係る構成、および組電池5に充電する外部機器が示されている。電池装置200は、組電池5と、電池管理装置100と、を備えている。
電池管理装置100は組電池5に係る制御装置10を備えている。外部機器は充電設備(CF)12と充電端末(CT)11を備えている。車両に搭載された充放電回路(CDC)8によって、組電池5と充電端末11との間で電力が交換可能になっている。
電池管理装置100は、前述の車両に設けられている。電池管理装置100は、前述の車両における二次電池を含む組電池5に対して、監視したり充放電を制御したりする管理装置として機能する。組電池5は外部機器によって充電可能になっている。
電池管理装置100と充電設備12との間においては、電力を一方向または双方向に流す電力処理が提供される。充電設備12は、住宅、事業所等に配置された電源機器である。充電設備12は、単なる電源のアウトレット、または充電のための充電スタンドとして構成されている。
充電端末11は、可搬型または定置型の機器である。充電端末11は、充電設備12または車両に配置することができる。充電端末11は、専用信号線を使用して車両と通信する。充電端末11は、充電器として構成することもできる。システムメインリレー6は、充電端末11と組電池5とを通電状態と非通電状態とに切り換えることができる。
充電設備12は、交流電源と、交流電源から供給される電力を出力するアウトレットとを備える。交流電源は、小規模な発電施設、または広域電力網から供給される。アウトレットは、充電設備12を提供する施設の外部に配置されており、所定のプラグを受け入れ可能である。アウトレットとプラグとは、充電設備12と充電端末11との間を接続する接続装置を提供する。
電池管理装置100を備える車両は、インレットを有する。インレットは、充電端末11の入力側接続器を提供する。インレットは、直流電力のための複数の端子とデータ通信のための複数の端子とを含む端子群を有する。
充電端末11は、充電設備12のアウトレットに接続可能なプラグを備える。プラグは、交流電力を通電可能である。充電端末11は、車両のインレットに接続可能なコネクタを備える。コネクタは充電ガンとも呼ばれる。コネクタは、交流電力のための複数の端子とデータ通信のための複数の端子とを含む端子群を有する。車両のインレットと充電端末11のコネクタとは、充電端末11と車両とを接続する接続装置を提供する。充電端末11は、充電端末11のプラグに供給される電力を調整しコネクタに供給する制御装置を備える。充電端末11の制御装置は、コネクタへの電力供給を断続するスイッチ回路を含む。充電端末11の制御装置は、電圧変換回路を含むことができる。
充電端末11の制御装置は、充電端末11のコネクタを経由して車両と通信するための通信装置でもある。充電端末11の制御装置は、電池管理装置100の制御装置10と連携し、組電池5への充電を制御する充電処理を実行する。充電端末11の制御装置は、充電端末11から給電が可能であることを示す信号をCPLT信号によって送信する。また、充電端末11の制御装置は、組電池5からの放電が可能となっていることを示す信号をCPLT信号によって受信する。充電端末11の制御装置は、充電端末11から組電池5への給電を断続する。
組電池5は、車両に設けられた走行用電動機に給電する。組電池5は、車両の走行用電源として利用することができるほどの高容量と高電圧を備えている。組電池5は、直列接続または並列接続された複数の電池群を含んでいる。電池群は、直列接続された複数の電池セル7を含んでいる。電池セル7は二次電池である。
車両に充放電回路8が搭載されている。充放電回路8は、車両のインレットに供給される電力を整流し、変圧し、組電池5に供給する充電回路として機能する。充放電回路8は、組電池5から得られる直流電力を交流電力に変換し車両のインレットに出力する放電回路としても機能できる。充放電回路8は、充電設備12の交流電源から組電池5への充電と、組電池5から交流電源への逆潮流とを可能とする。充放電回路8は、インバータ回路と、電圧コンバータ回路とを含むことができる。電池管理装置100の制御装置10は、充放電回路8を制御する。
制御装置10は、監視IC(BMIC)3、絶縁素子(IE)2、マイクロコンピュータ(μC)1を含んでいる。監視IC3は、各電池セル7の陽極と負極との間の電圧(端子間電圧)を計測する計測部として機能する。一つの監視IC3は、例えば、一つの電池群に含まれる各電池セル7の端子間電圧を計測する。
マイクロコンピュータ1と各監視IC3は、絶縁素子2によって絶縁されている。マイクロコンピュータ1は、各監視IC3によって計測された端子間電圧を、絶縁素子2を介して取得する。マイクロコンピュータ1は、各監視IC3を通じて各電池セル7を監視し、充放電状態等の組電池5の状態を管理している。なお、監視IC3と監視IC3は、絶縁素子(IE)21によって絶縁されている。この絶縁構成を備えることは、監視IC3ごとにGNDレベルが異なるためであり、通信性能を確保するためである。
マイクロコンピュータ1は、電池セル7における電圧計測範囲を調整して限定計測範囲を設定する。マイクロコンピュータ1は、ノイズの影響が少ない車両状態である場合に、限定計測範囲を設定する。マイクロコンピュータ1は、電池セル7における全範囲の電圧のうち、任意の限定計測範囲を設定できる範囲設定部として機能する。マイクロコンピュータ1は、監視IC3に対して送信するコマンドによって調整された電圧計測範囲を、限定計測範囲として設定する。監視IC3は、マイクロコンピュータ1から出力されたコマンドを解釈して、このコマンドに含まれる電圧計測範囲で作動する。
マイクロコンピュータ1は、一例として、以下のようなロジックで限定計測範囲を設定する。マイクロコンピュータ1は、電池セル7における全範囲の電圧について監視IC3が計測した電圧計測値のうち最大値を用いて、最大値を含む限定計測範囲を設定する。マイクロコンピュータ1は、電池セル7における全範囲の電圧について監視IC3が計測した電圧計測値のうち最小値を用いて、最小値を含む限定計測範囲を設定する。マイクロコンピュータ1は、電池における全範囲の電圧について監視IC3が計測した電圧計測値のうち最大値と最小値を用いて、限定計測範囲を設定する。
監視IC3は、例えば図2に示すように、コマンド部(CS)31、アナログデジタルコンバータ(A/D)32、レベルシフタ(L/S)33、スイッチ群(MUX)34を含む。監視IC3は、さらに均等化回路(BC)4を含んでいる。
コマンド部31は、シリアルI/O、不揮発性メモリ、ディジタルフィルタを含み、マイクロコンピュータ1からのコマンドを解釈する機能を有する。
アナログデジタルコンバータ32は、アナログ電気信号をデジタル電気信号に変換する電子回路をなすA/Dコンバータと、A/Dコンバータの入力レンジを制限するためのクランプ回路と、を有する。A/Dコンバータの量子化ビット数は固定値になっている。クランプ回路がコマンド部31によって制御されることで、A/Dコンバータの入力レンジが制御される。
スイッチ群34は、各電池セル7の電圧を任意に選択できる機能を有している。スイッチ群34は、複数の入力を選択して、一つの信号として出力する機能を有している。
レベルシフタ33は、レベルシフタ、ゲインセクタとして機能する。レベルシフタ33は、オペアンプと、オペアンプの入力端子と出力端子との間で並列接続された複数の帰還回路と、を有する。この帰還回路には直列接続されたスイッチとコンデンサが含まれている。複数の帰還回路に含まれるコンデンサの静電容量は同一でも不同でもよい。
レベルシフタ33の有する複数の帰還回路のスイッチが選択的に通電状態と遮断状態とに制御される。これによりオペアンプの入力端子と出力端子との間で接続されるコンデンサの数が変化する。オペアンプの入力端子と出力端子との間の静電容量が変化する。また、オペアンプの入力端子と出力端子との間の抵抗が変化する。この結果、レベルシフタ33のゲインとオフセットが制御される。
アナログデジタルコンバータ32の入力レンジの制限とレベルシフタ33のゲインとオフセットの調整により、アナログデジタルコンバータ32でアナログデジタル変換されるアナログ電気信号の電圧レンジが制御される。アナログデジタルコンバータ32でアナログデジタル変換される電池セル7の電圧の電圧レンジが制御される。この結果、電圧計測範囲が調整される。
監視IC3は、マイクロコンピュータ1によって設定された電圧計測範囲において電池セル7の電圧を計測する。監視IC3は、マイクロコンピュータ1によって設定された限定計測範囲において電池セル7の電圧を計測する計測部として機能する。
組電池5に含まれる電池セル7は、蓄電率(SOC)と開放電圧(OCV)との関係性について固有の特性を有している。この明細書において電池セル7の蓄電率は、SOCと記載することがある。電池セル7がリチウムイオン二次電池である場合、電池セル7は一例として図3に示すような特性データを有する。図3のような特性データは、制御装置10の記憶部(ME)22に記憶されている。各種2次電池のSOCとOCVの特性データの温度依存性が記憶部22に記憶されている。電池セル7の種類と温度に応じた特性データがマイクロコンピュータ1によって読み出される。なお、記憶部22はマイクロコンピュータ1に内蔵されていてもよい。図面では、構成要素を明示するために、マイクロコンピュータ1と記憶部22とを分けて表記している。
マイクロコンピュータ1は、監視IC3によって計測された電池セル7の端子間電圧とこの特性データとを用いた演算によって電池セル7のSOCを推定するSOC推定部として機能する。マイクロコンピュータ1は、計測可能な電池セル7の電圧の全範囲において計測された電圧計測値に基づいて、SOCを推定するSOC推定部として機能する。マイクロコンピュータ1は、計測した電圧計測値に基づいて、SOCを推定するSOC推定部として機能する。
図3に示す特性データは、電池セル7のSOCと開放電圧との関係性を示している。この特性データには、SOCに対する電圧変化幅が所定の値以下である低変化領域が含まれている。特性データには、低変化領域よりも低いSOC範囲と低変化領域よりも高いSOC範囲とのそれぞれにおいて電圧変化が低変化領域よりも大きい高変化領域が含まれている。
電圧の低変化領域は、図3の縦軸において矢印で示された範囲である。低変化領域に対応する電池セル7のSOCは、図3の横軸において矢印で示された範囲に相当する。電池セル7の端子間電圧の全範囲には、SOCに対する電圧変化幅が、低SOC領域や高SOC領域よりも小さい低変化領域が含まれている。
マイクロコンピュータ1は、SOCと開放電圧とに関する関係性を示す電池セル7の固有特性に基づいて、限定計測範囲を設定する範囲設定部として機能する。マイクロコンピュータ1は、電池セル7に係る全範囲の電圧のうち、低変化領域に含まれる電圧範囲を限定計測範囲として設定することが好ましい。制御装置10は、このような特徴を有する電池セル7について、高精度の電圧計測、および蓄電状態の正確な推定を実施できる機能を有する。
均等化回路4は、電池群に含まれる複数の電池セル7の電圧ばらつきを低減するための処理(均等化処理)を実行する均等化処理部として機能する。均等化回路4は、制御部と均等化回路部を含んでいる。制御部は、監視IC3に内蔵されている。均等化回路部は、各電池セル7に接続されている。均等化回路部は監視IC3に内蔵されている。なお、均等化回路部は監視IC3の外部に配置されてもよい。
均等化処理では、例えば、電池群に含まれる複数の電池セル7の中で、相対的に高い電圧計測値を示す電池セル7が放電される。それとともに、電池群に含まれる電池セル7の中で、相対的に低い電圧計測値を示す電池セル7が充電される。これにより電池群に含まれる複数の電池セル7のSOCが均等化される。
マイクロコンピュータ1は、均等化処理条件が成立する場合に、均等化回路4に対して、対応する電池群に均等化処理を命令する信号を送る。マイクロコンピュータ1は、均等化処理条件が不成立である場合に、均等化回路4に対して均等化処理を命令する信号を送らない。マイクロコンピュータ1は、均等化処理条件が不成立である場合に、均等化回路4に対して均等化処理を禁止する信号を送るようにしてもよい。
マイクロコンピュータ1は、均等化処理条件の成立か不成立かに応じて、均等化処理を実施するか否かを判断する均等化判断部として機能する。マイクロコンピュータ1は、複数の電池群のうち所定の電池群で計測した最大電圧計測値と最小電圧計測値との差が判断閾値よりも小さい場合は均等化処理を実施しない判断をする。マイクロコンピュータ1は、前述の最大電圧計測値と最小電圧計測値との差が判断閾値よりも大きい場合は均等化処理を実施する判断をする。
この明細書における制御装置は、電子制御装置(ECU:Electronic Control Unit)とも呼ばれる場合がある。制御装置、または制御システムは、(a)if-then-else形式と呼ばれる複数の論理としてのアルゴリズム、または(b)機械学習によってチューニングされた学習済みモデル、例えばニューラルネットワークとしてのアルゴリズムによって提供される。
制御装置は、少なくとも一つのコンピュータを含む制御システムによって提供される。制御システムは、データ通信装置によってリンクされた複数のコンピュータを含む場合がある。コンピュータは、ハードウェアである少なくとも一つのプロセッサ(ハードウェアプロセッサ)を含む。ハードウェアプロセッサは、下記(i)、(ii)、または(iii)により提供することができる。
(i)ハードウェアプロセッサは、少なくとも一つのメモリに格納されたプログラムを実行する少なくとも一つのプロセッサコアである場合がある。この場合、コンピュータは、少なくとも一つのメモリと、少なくとも一つのプロセッサコアとによって提供される。プロセッサコアは、CPU:Central Processing Unit、GPU:Graphics Processing Unit、RISC-CPUなどと呼ばれる。メモリは、記憶媒体とも呼ばれる。メモリは、プロセッサによって読み取り可能な「プログラムおよび/またはデータ」を非一時的に格納する非遷移的かつ実体的な記憶媒体である。記憶媒体は、半導体メモリ、磁気ディスク、または光学ディスクなどによって提供される。プログラムは、それ単体で、またはプログラムが格納された記憶媒体として流通する場合がある。
(ii)ハードウェアプロセッサは、ハードウェア論理回路である場合がある。この場合、コンピュータは、プログラムされた多数の論理ユニット(ゲート回路)を含むデジタル回路によって提供される。デジタル回路は、ロジック回路アレイ、例えば、ASIC:Application-Specific Integrated Circuit、FPGA:Field Programmable Gate Array、SoC:System on a Chip、PGA:Programmable Gate Array、CPLD:Complex Programmable Logic Deviceなどとも呼ばれる。デジタル回路は、プログラムおよび/またはデータを格納したメモリを備える場合がある。コンピュータは、アナログ回路によって提供される場合がある。コンピュータは、デジタル回路とアナログ回路との組み合わせによって提供される場合がある。
(iii)ハードウェアプロセッサは、上記(i)と上記(ii)との組み合わせである場合がある。(i)と(ii)とは、異なるチップの上、または共通のチップの上に配置される。これらの場合、(ii)の部分は、アクセラレータとも呼ばれる。
制御装置と信号源と制御対象物とは、多様な要素を提供する。それらの要素の少なくとも一部は、ブロック、モジュール、またはセクションと呼ぶことができる。さらに、制御システムに含まれる要素は、意図的な場合にのみ、機能的な手段と呼ばれる。
次に、制御装置10の電池管理に係る制御について、図4のフローチャートにしたがって説明する。この説明においては、制御装置10に含まれるどの構成要素が実施する処理であるのかを明示するため、必要に応じて、処理を説明する文章の主語を、制御装置10に代わって、その処理を実行する制御装置10の構成要素で記載する。また、図面では、開始をS、終了をEで表記している。
ステップS100で制御装置10の電源がオン状態になると、ステップS110で制御装置10は、電圧計測条件が成立するか否かを判断する。ステップS110において制御装置10は、車両を走行させる動力を発生するモータやエンジンが停止状態であり、組電池5の充放電が行われていない場合には、ノイズの影響がないと判断する。制御装置10は、例えば、イグニッションスイッチやモータスタートスイッチがオフ状態である場合にはモータやエンジンが停止状態であると判断する。
制御装置10は、例えば、車両のインレットと充電端末11のコネクタとが接続されていない状態である場合には電池の充放電が停止中であると判断する。車両のインレットと充電端末11のコネクタとが接続されていない状態である場合、制御装置10は組電池5の充放電が停止中であると判断する。制御装置10は、例えば、システムメインリレー6がオフ状態であり、充電端末11と組電池5とが非通電である場合には組電池5の充放電が停止中であると判断する。制御装置10は、車両の動力機器が停止状態であり、かつ組電池5に対する充放電が停止中であるときに、電圧計測条件が成立すると判断する。制御装置10は、電圧計測条件が成立すると、ノイズが許容できる状況であると判断する。
ステップS110において電圧計測条件が不成立と判断すると、制御装置10は図4のフローチャートを終了する。ステップS110において電圧計測条件が成立と判断すると、制御装置10はステップS120に進む。ステップS120で制御装置10は、電池管理装置100において電気回路の故障があるか否かを判断する。制御装置10は、電池管理装置100における電気回路の故障の有無を判断する故障判断部としての機能を有している。ステップS120において電気回路の故障があると判断すると、制御装置10は限定計測範囲を設定する処理を実施することなく、図4のフローチャートを終了する。
ステップS120において電気回路の故障がないと判断すると、制御装置10はステップS130に進む。ステップS130で制御装置10は、各電池セル7の電圧値(セル電圧)について見当がついているか否かを判断する。現在の電圧値についておおよその値がわかっている場合は、制御装置10はステップS130で見当がついていると判断する。例えば、電圧値が記憶部22に記憶されている場合、制御装置10はステップS130で見当がついていると判断する。
ステップS130において見当がついていると判断すると、制御装置10はステップS140に進む。ステップS130において見当がついていないと判断すると、制御装置10はステップS150に進む。
各電池セル7の電圧値について見当がついていると判断すると、ステップS140でマイクロコンピュータ1は監視IC3に限定範囲での電池セル7の電圧を検出するコマンドを、制限コマンドとして出力する。コマンド部31は、制限コマンドに基づいてアナログデジタルコンバータ32とレベルシフタ33を制御して、入力レンジ、ゲイン、および、オフセットを制御する。これにより電池セル7の限定計測範囲が設定される。
ステップS140を経てステップS160へ進むと制御装置10の監視IC3は、ステップS150で設定された限定計測範囲において、電池セル7の電圧を計測し、計測した電圧計測値をマイクロコンピュータ1に出力する。マイクロコンピュータ1はこの限定計測範囲で計測された電圧を取得して、記憶部22に記憶する。そして制御装置10はステップS180へ進む。
フローを遡って、各電池セル7の電圧値について見当がついていないと判断すると、ステップS150でマイクロコンピュータ1は監視IC3に全範囲での電池セル7の電圧を検出するコマンドを、非制限コマンドとして出力する。コマンド部31は、非制限コマンドに基づいてアナログデジタルコンバータ32とレベルシフタ33を制御して、入力レンジ、ゲイン、および、オフセットを制御する。これにより電池セル7の全範囲での電圧計測範囲が設定される。
非制限コマンドを受信すると監視IC3は、ステップS170において全範囲で電池セル7の電圧を計測し、計測した電圧計測値をマイクロコンピュータ1に出力する。マイクロコンピュータ1はこの全範囲で計測された電圧を取得して、記憶部22に記憶する。次に制御装置10はステップS180へ進む。
ステップS180でマイクロコンピュータ1は、電池群について均等化処理を実施するか否かを判断する。ステップS180でマイクロコンピュータ1は、電池群に含まれる複数の電池セル7に係る最大電圧計測値と最小電圧計測値との差である電圧差が判断閾値よりも大きいか否かに応じて均等化処理の実施か否かを判断する。マイクロコンピュータ1は、前述の電圧差が判断閾値よりも小さい場合は均等化処理を実施せずに図4のフローチャートを終了する。マイクロコンピュータ1は、前述の電圧差が判断閾値よりも大きい場合、均等化処理は必要であると判断する。マイクロコンピュータ1は、ステップS190において均等化回路4を制御して均等化処理を実施させる。マイクロコンピュータ1は、前述の電圧差が判断閾値よりも小さい場合、均等化処理は不要であると判断をする。
ステップS110における判断処理は、以下のように実施してもよい。ステップS110では、車両の駆動力を提供する動力機器が停止状態、組電池5に対する充放電が停止中、およびシステムメインリレー6がオフ状態のとき、のいずれかであるときに、マイクロコンピュータ1はノイズが許容できる状況であると判断する。ステップS110では、ノイズが許容できる状況であると判断すると、マイクロコンピュータ1はノイズレベルを判断してノイズレベルが許容できるか否かを判断する。ノイズレベルが許容できると判断すると、マイクロコンピュータ1はステップS120に進む。マイクロコンピュータ1は、このようにして、ノイズが許容できる状況において許容できるノイズレベルであるときに、電圧計測条件が成立すると判断してもよい。制御装置10は、信号と雑音の比率であるSN比が規定値以上であるとき、ノイズが許容できる状態であると判断する。SN比が規定値以下のときは、電圧検出のための信号に対してノイズの影響が大きくなり、電圧検出誤差に影響が大きくなる。ノイズの発生元は、例えば、動力機器などの組電池5に繋がる車載負荷や外部機器である。
第1実施形態の電池管理装置100がもたらす作用効果について説明する。電池管理装置100は、車載用の組電池5に含まれる電池セル7について電圧計測範囲を限定した限定計測範囲を設定する範囲設定部と、範囲設定部によって設定された限定計測範囲において電池セル7の電圧を計測する計測部とを備える。これによれば、電圧計測の精度向上を図るための適切な電圧計測範囲の設定がされる。電圧計測の精度向上が図れることにより、電圧計測を用いてSOC推定やSOH推定を行う場合にこれらの高精度な推定に寄与できる。
例えば、電池管理装置100は電池セル7の電圧計測範囲を0.0V~5.0Vの全範囲から、3.0V~3.5Vの限定計測範囲に狭める。この限定測定範囲において、アナログ電気信号の電池セル7の電圧がアナログデジタルコンバータ32でデジタル電気信号に変換される。これによりアナログデジタルコンバータ32の量子化誤差が低減される。上記例の場合、量子化誤差が10分の1程度になる。これにより電池セル7の電圧の検出精度が向上される。
監視IC3は、マイクロコンピュータ1から出力されるコマンドに応じて電圧計測範囲を調整して限定計測範囲を設定する。これによれば、異なる開放電圧の範囲をもつ複数の電池セル7に対して、1個の制御装置10で適切な電圧計測を実施することができる。
電池管理装置100の範囲設定部は、電池セル7の電圧値について見当がついている場合は見当がついている電圧値に基づいて調整した限定計測範囲を設定する。電池管理装置100の範囲設定部は、電池セル7の電圧値について見当がついていない場合は全範囲の電圧について実施した電圧計測値に基づいて限定計測範囲を設定する。電池管理装置100の範囲設定部は、例えば、電池セル7の電圧値が記憶されていない場合は全範囲の電圧について実施した電圧計測値に基づいて限定計測範囲を設定する。これによれば、計測対象とする電池セル7の開放電圧を確認した上で、確認した計測値に基づいて限定計測範囲が設定される。この設定によれば、電圧計測の精度向上をもたらす適切な電圧計測範囲が設定される。
電池管理装置100の範囲設定部は、電圧の全範囲について計測した電圧計測値のうち最大値と最小値の少なくとも一方を用いて、限定計測範囲を設定する。これによれば、電圧計測範囲が、現状態の電圧値の反映された限定計測範囲に設定される。これにより電圧計測の精度が向上される。
ノイズが許容できる状況において許容できるノイズレベルであるときに、範囲設定部は限定計測範囲を設定する。計測部はこの限定計測範囲において電池セル7の電圧を計測する。これによれば、ノイズの影響が少ない状態で許容できるノイズレベルであるときに設定した限定計測範囲において電圧が計測される。このため、電池管理装置100は、ノイズと信号を切り分けた電圧計測を実施でき、さらに電圧計測精度の向上に寄与する。
車両の駆動力を提供する動力機器が停止状態であり、かつ組電池5に対する充放電が停止中であるときに、範囲設定部は限定計測範囲を設定する。計測部はこのように設定された限定計測範囲において電池セル7の電圧を計測する。これによれば、ノイズの影響が少ない状態で設定した限定計測範囲において電圧を計測するので、ノイズと信号を切り分けた電圧計測が実施される。このため、電池管理装置100は、さらに電圧計測精度の向上に寄与する。
電池管理装置100は、複数の電池群のうち所定の電池群に含まれる複数の電池セル7の電圧のばらつきを低減する均等化処理を実施するか否かを判断する均等化判断部を備える。この均等化判断部は、限定計測範囲において計測された電池セル7の電圧計測値に基づいて均等化処理を実施するか否かを判断する。これによれば、限定計測範囲において計測した高精度の電圧計測値に基づくことにより、高精度な均等化処理の実施判断を行うことができる。
電池管理装置100は、開放電圧と蓄電率との関係性を示す特性データと限定計測範囲において計測された電池セル7の電圧計測値とに基づいて蓄電率を推定するSOC推定部を備える。これによれば、限定計測範囲において計測した高精度の電圧計測値に基づく推定により、高精度のSOC推定を行うことができる。
<第2実施形態>
第2実施形態について図5および図6を参照して説明する。図5、図6にしたがって、第2実施形態の電池管理に係る制御について説明する。第2実施形態で特に説明しない構成、作用、効果については、第1実施形態と同様であり、以下に第1実施形態と異なる点についてのみ説明する。
第2実施形態の電池管理に係る制御は、第1実施形態の電池管理に係る制御に対して、SOC推定のステップ、SOH推定に係る判断ステップ、実施ステップのみが相違する。図5に示すフローチャートにおけるステップのS200~S270では、図4に示すステップのS100~S170と同一の処理が行われる。
図5に示すように、ステップS260若しくはステップS270で電圧計測を実施した後、制御装置10はステップS280において、前述したようにSOCを推定する処理を実行する。マイクロコンピュータ1は、電圧計測値と前述の特性データとを用いてSOCを算出することによりSOC推定を行う。
ステップS290でマイクロコンピュータ1は、電池セル7の劣化度合を示すSOHを推定する条件(SOH推定条件)が成立しているか否かを判断する。マイクロコンピュータ1は、例えば、SOCの推定に用いられる電圧計測のタイミングがイグニッションスイッチやモータスタートスイッチがオフ状態になってから所定時間経過している場合にSOH推定条件が成立したと判断する。この場合、電池分極が緩和した状態であるから、マイクロコンピュータ1はSOH推定の許可を行う。
ステップS290でSOH推定条件が成立していないと判断した場合は、SOHの推定をすることなく、図5のフローチャートを終了する。ステップS290でSOH推定条件が成立していると判断した場合は、マイクロコンピュータ1は、ステップS300でSOHの推定を行い、図5のフローチャートを終了する。マイクロコンピュータ1は、SOHの推定を行うSOH推定部として機能する。
マイクロコンピュータ1は、下記の数式(1)を用いた演算により、SOH(%)を計算してSOHを推定することが好ましい。
図6は、電池セル7に係る特性データとSOH推定を求める演算とを示している。図6に示すように、SOC1とSOC2は、マイクロコンピュータ1によって設定された限定計測範囲において計測された高精度な電圧計測値を用いて推定されるSOCの推定値である。Iの積分値は、SOC1からSOC2までの電流の値を積算することにより算出される。初期満充電容量は、電池セル7の製造時における満充電容量、換言すれば、劣化が始まっていない満充電容量である。
電池管理装置100は、ステップS290の判断処理を、下記のような方法によって行うようにしてもよい。マイクロコンピュータ1は、電圧計測装置についての計測誤差が基準値よりも小さい場合にSOH推定条件が成立していると判断するようにしてもよい。マイクロコンピュータ1は、電流計測装置についての計測誤差が基準値よりも小さい場合にSOH推定条件が成立していると判断するようにしてもよい。マイクロコンピュータ1は、電圧計測装置および電流計測装置が正常に作動している場合にSOH推定条件が成立していると判断するようにしてもよい。
<第3実施形態>
第3実施形態について図7を参照して説明する。図7にしたがって、第3実施形態の電池管理に係る制御について説明する。第3実施形態で特に説明しない構成、作用、効果については、第1実施形態と同様であり、以下に第1実施形態と異なる点についてのみ説明する。
第3実施形態の電池管理に係る制御は、第1実施形態の制御に対して、ステップS110の少なくとも一部をステップS112、S114、S116に細分化して明示した点が相違する。図7のフローチャートにおいて、図4に示すステップと同じステップには同一のステップ符号を付している。
図7に示すように、ステップS112においてマイクロコンピュータ1はノイズの影響があるか否かを判断する。ノイズの影響がないと判断するとマイクロコンピュータ1はステップS120に進む。ノイズの影響があると判断するとマイクロコンピュータ1はステップS114の判断処理を実行する。
ステップS114で制御装置10は、現在、外部機器からの充電が組電池5に対して実施されているかまたは実施準備中であるか否かを判断する。外部機器は、例えば充電設備12である。外部機器には、小規模な発電施設または広域電力網から供給される交流電源をアウトプットする機器が含まれる。外部機器には、直流電力をアウトプットする蓄電施設、蓄電池等が含まれる。
ステップS114で充電中または充電準備中でないと判断した場合は、制御装置10は図7のフローチャートを終了する。ステップS114で充電中または充電準備中であると判断した場合は、制御装置10は、ステップS116で充電停止の処理または充電準備の停止の処理を実行する。ステップS116による充電停止後、制御装置10は前述したようにステップS120以降の処理を実行する。S114、S116のステップによれば、組電池5への充電中または充電準備中である場合に、これを停止することにより、ノイズ影響の少ない状態にすることができる。これにより、高精度の電圧計測を可能とする限定計測範囲の設定が実施される。
第3実施形態は以下の効果をもたらす。外部電源から組電池5へ充電中である場合に当該充電を一時停止させた状態で、範囲設定部は限定計測範囲を設定し、計測部は限定計測範囲において電池の電圧を計測する。この制御によれば、組電池5に対する外部機器からの充電中であっても、高精度な電圧計測を実施するための機会を提供できる電池管理装置100が得られる。
<第4実施形態>
第4実施形態について図8を参照して説明する。図8にしたがって、第4実施形態の電池管理に係る制御について説明する。第4実施形態で特に説明しない構成、作用、効果については、第1実施形態と同様であり、以下に第1実施形態と異なる点についてのみ説明する。
第4実施形態の電池管理に係る制御は、第1実施形態の制御に対して、S162、S164およびS166のステップを有する点が相違する。図8のフローチャートにおいて、図4に示すステップと同じステップには同一のステップ符号を付している。
図8に示すように、ステップS160で限定計測範囲において電圧計測した後、制御装置10はステップS162の判断処理を実行する。ステップS162で制御装置10のマイクロコンピュータ1は、設定された限定計測範囲の幅に応じて、ステップS180の判断で用いる判断閾値の補正値を決定する均等化判断部としての機能を果たす。マイクロコンピュータ1は、限定計測範囲の幅が記憶部22に記憶された所定範囲幅よりも大きい場合は判断閾値を大きく補正する。マイクロコンピュータ1は、限定計測範囲の幅が所定範囲幅よりも小さい場合は判断閾値を小さく補正する。
限定計測範囲の幅が所定範囲幅よりも大きい場合は、マイクロコンピュータ1はステップS164に進む。マイクロコンピュータ1は、ステップS164で大きく補正した判断閾値に決定する処理を実行する。マイクロコンピュータ1は、ステップS180で前述の電圧差が、大きく補正された判断閾値よりも大きいか否かに応じて均等化処理の実施か否かを判断する。ステップS164で判断閾値を大きく補正した場合には、補正前に対して、均等化処理は不実施になりやすくなる。
限定計測範囲の幅が所定範囲幅よりも小さい場合は、マイクロコンピュータ1はステップS166に進む。マイクロコンピュータ1は、ステップS166で小さく補正した判断閾値に決定する処理を実行する。マイクロコンピュータ1は、ステップS180で前述の電圧差が、小さく補正された判断閾値よりも大きいか否かに応じて均等化処理の実施か否かを判断する。ステップS166で判断閾値を小さく補正した場合には、補正前に対して、均等化処理は実施になりやすくなる。
マイクロコンピュータ1は、以下の方法により、限定計測範囲の幅に応じて判断閾値を設定するようにしてもよい。マイクロコンピュータ1は、限定計測範囲の幅を係数倍し、このように算出した限定計測範囲の幅が小さいほど判断閾値を小さく補正する。マイクロコンピュータ1は、このように算出した限定計測範囲の幅が大きいほど判断閾値を大きく補正する。マイクロコンピュータ1は、所定の電池群について計測した最大電圧計測値と最小電圧計測値との差がこの判断閾値よりも小さい場合は均等化処理を実施しない判断をする。マイクロコンピュータ1は、前述の最大電圧計測値と最小電圧計測値との差がこの判断閾値よりも大きい場合は均等化処理を実施する判断をする。
第4実施形態は以下の効果をもたらす。マイクロコンピュータ1は、限定計測範囲の幅に応じて、判断閾値を設定する。この制御によれば、限定計測範囲の幅に応じて設定された判断閾値を用いて、高精度な均等化処理の要否判断が実施される。この結果、高精度な均等化処理が実施される。
マイクロコンピュータ1は、限定計測範囲の幅が所定範囲幅よりも大きい場合は判断閾値を大きく補正する。マイクロコンピュータ1は、限定計測範囲の幅が所定範囲幅よりも小さい場合は判断閾値を小さく補正する。マイクロコンピュータ1は、複数の電池のうち所定の電池群について計測した最大電圧計測値と最小電圧計測値との差が判断閾値よりも小さい場合は均等化処理を実施しない判断をする。マイクロコンピュータ1は、前述の最大電圧計測値と最小電圧計測値との差が判断閾値よりも大きい場合は均等化処理を実施する判断をする。
この制御によれば、限定計測範囲において計測した高精度の電圧計測値に基づく均等化処理の要否判断により、高精度の均等化処理を行うことができる。さらに限定計測範囲の幅に応じて補正した判断閾値を用いることにより、高精度の均等化処理の要否判断が実施される。このため、高精度な均等化処理が実施される。
<第5実施形態>
第5実施形態について図9を参照して説明する。図9は、監視IC103の構成図である。第5実施形態で特に説明しない構成、作用、効果については、第1実施形態と同様であり、以下に第1実施形態と異なる点についてのみ説明する。
第5実施形態の監視IC103は、コマンド部31、複数のアナログデジタルコンバータ32、複数のレベルシフタ33、スイッチ群34を含む。監視IC103は、さらに均等化回路4を含んでいる。アナログデジタルコンバータ32とレベルシフタ33は、互いに対応するように設けられている。
監視IC103は、一つのスイッチ群34に対して複数のアナログデジタルコンバータ32を備える構成により、複数の異なる限定計測範囲を設定する機能を有する。監視IC103は、設定された複数の限定計測範囲において電池セル7の電圧を計測する計測部として機能する。各アナログデジタルコンバータ32は、所定の限定計測範囲を設定する機能を有する構成としてもよい。この場合、一つの電池群に対応して設けられている複数のアナログデジタルコンバータ32とレベルシフタ33は、異なる所定の限定計測範囲を設定するように構成されている。
第5実施形態の範囲設定部は、複数の異なる限定計測範囲を設定する。これによれば、複数の電池セル7に対する適切な電圧計測が実施される。
また、監視IC103は、一つのスイッチ群34に対して複数のレベルシフタ33とアナログデジタルコンバータ32を備えている。そのために複数の電池セル7の電圧を早く計測することができる。
なお、当然ではあるが、スイッチ群34が複数の電池セル7の電圧を一つ一つ選択する際に、それら複数の電池セル7一つ一つの電圧計測範囲をアナログデジタルコンバータ32とレベルシフタ33で個別に設定してもよい。係る構成はすべての実施形態と変形例とに適用可能である。
また、スイッチ群34が電池群に含まれる複数の電池セル7の電圧を選択する際に、それら複数の電池セル7の少なくとも一部に対して共通の電圧計測範囲をアナログデジタルコンバータ32とレベルシフタ33で設定してもよい。係る構成においては、選択された複数の電池セル7で計測される電圧の最大値と最小値の少なくとも一方に基づいて、共通の電圧計測範囲を限定計測範囲として設定してもよい。係る構成はすべての実施形態と変形例に適用可能である。
<第6実施形態>
第6実施形態を図10~図12に基づいて説明する。
第1実施形態では、車両の動力機器が停止状態であるときにマイクロコンピュータ1が電池セル7の電圧計測範囲を設定する例を示した。車両のイグニッションスイッチがオフ状態であるときにマイクロコンピュータ1が電池セル7の電圧計測範囲を設定する例を示した。
これに対して本実施形態では、車両のイグニッションスイッチがオン状態であるときにマイクロコンピュータ1が電池セル7の電圧計測範囲を設定する。マイクロコンピュータ1はこの電圧計測範囲の設定と電圧検出をサイクルタスクとして実行している。
まず、電池セル7の電圧検出を図10に基づいて詳説する。図10に電池セル7の電圧の時間変化を示す。縦軸は任意単位である。横軸は時間である。任意単位はa.u.で表記している。時間はTで表記している。
なお、電池セル7には内部抵抗がある。そのために電池セル7のSOCに応じた開放電圧と、監視IC3で検出される閉路電圧とには、この内部抵抗と電池セル7を流れる電流に応じた電圧降下分の差がある。以下においては、監視IC3で検出される電池セル7の電圧を閉路電圧と統一して表記する。
図10には、閉路電圧のほかに、電池管理装置100の駆動状態、組電池5を流れる実電流、ある一つの電池セル7の閉路電圧を示している。電池管理装置100の駆動状態はDSと表記している。説明を簡便とするため、図面に示す電池セル7の閉路電圧の挙動と組電池5の閉路電圧の挙動は同等とする。挙動を明示するため、図面では電池セル7の閉路電圧が短時間で大きく変化するように図示している。
時間0の初期状態において、車両のイグニッションスイッチはオフ状態になっている。電池管理装置100は非駆動状態になっている。記憶部22には閉路電圧などの電池情報が記憶されていない。組電池5と各種車載機器との間の導通状態を制御するシステムメインリレー6が遮断状態になっている。そのために組電池5に電流が実質的に流れていない。電池セル7の閉路電圧は低変化領域の値になっている。
電池セル7に電流が流れていなくとも、自己放電のために電池セル7のSOCは減少する。そのために時間0の初期状態において、電池セル7の閉路電圧は微量ながら減少傾向にある。
時間t0になると、車両のイグニッションスイッチがオフ状態からオン状態になる。電池管理装置100は非駆動状態から駆動状態になる。システムメインリレー6が遮断状態から通電状態になる。これにより組電池5から各種車載機器への電源電力の供給が開始する。組電池5に実電流が流れはじめる。電池セル7のSOCの減少率が増大する。それにともなって、電池セル7の閉路電圧の減少率も増大する。
時間t1になると、マイクロコンピュータ1は電池セル7の閉路電圧を取得する。この際、記憶部22には電池情報が記憶されていない。そのため、マイクロコンピュータ1は時間t1での電圧計測範囲を全範囲に設定する。すなわち、マイクロコンピュータ1は電圧計測範囲を0.0V~5.0Vに設定する。
時間t2になると、マイクロコンピュータ1は再び電池セル7の閉路電圧を取得する。この際、マイクロコンピュータ1は時間t1で取得した電池セル7の閉路電圧に基づいて、時間t2での限定計測範囲の中心値を決定している。また、マイクロコンピュータ1は限定計測範囲の範囲幅αを決定している。
電圧計測範囲は図10に示す実線の両端矢印の幅で示される。限定計測範囲の中心値と上下限値との差は範囲幅αに設定される。範囲幅αは閉路電圧の検出誤差よりも大きな値である。範囲幅αは図6に示すOCV1とOCV2の差の半分よりも小さい値である。なお、中心値と上限値との差、および、中心値と下限値との差は、同一でも不同でもよい。本実施形態では範囲幅αを固定値にしている。範囲幅αは記憶部22に記憶されている。そのため、限定計測範囲は実質的に閉路電圧に基づいて決定される。マイクロコンピュータ1はこの範囲幅αと取得した閉路電圧とに基づいて限定計測範囲を設定する。マイクロコンピュータ1は、例えば、時間t2の限定計測範囲を2.8V~3.2Vに設定する。マイクロコンピュータ1はこの時間t2での限定計測範囲において監視IC3で検出された閉路電圧を取得する。
なお、厳密に言えば、電池管理装置100での演算処理があるため、時間t2における、限定計測範囲の決定タイミングと、閉路電圧の取得タイミングとは同一にならない。決定タイミングは取得タイミングの手前である。しかしながら、これら2つのタイミングの差は微小である。そのためにこれら2つのタイミングを同一とみなして記載している。
マイクロコンピュータ1は取得周期で閉路電圧を取得している。この取得周期は、急速充電などによって電池セル7の充放電状態が急変しない限り、電池セル7のSOCが急変しないことの期待される時間間隔である。取得周期は、電池セル7の閉路電圧の変化量が範囲幅αを超えないことが期待される時間間隔である。時間t1から取得周期が経過すると時間t2になる。
時間t2から取得周期が経過して時間t3になると、マイクロコンピュータ1は時間t2の閉路電圧に基づいて限定計測範囲を決定する。マイクロコンピュータ1は、例えば、時間t3の限定計測範囲を2.6V~3.0Vに設定する。そしてマイクロコンピュータ1はこの限定計測範囲において監視IC3で検出された電池セル7の閉路電圧を取得する。
時間t3から時間tc1になると、車両の駆動状態が変化する。実電流が低減する。これに伴って、閉路電圧の減少率も低減する。
時間t3から取得周期が経過して時間t4になると、マイクロコンピュータ1は時間t3の閉路電圧に基づいて限定計測範囲を決定する。マイクロコンピュータ1は、例えば、時間t4の検出範囲を2.4V~2.8Vに設定する。マイクロコンピュータ1はこの限定計測範囲において監視IC3で検出された電池セル7の閉路電圧を取得する。
時間t4から時間tc2になると、充電端末11を介して充電設備12が車両に接続される。充電設備12により組電池5が急速充電される。これにより実電流が急上昇する。マイクロコンピュータ1は係る情報を充電設備12から取得する。この際、マイクロコンピュータ1は電圧計測範囲を、全範囲に設定する。
時間t4から取得周期が経過して時間t5になると、マイクロコンピュータ1は全範囲において監視IC3で検出された電池セル7の閉路電圧を取得する。係る電圧計測範囲の変更のため、図10に示すように、たとえ閉路電圧が時間tc2から急上昇したとしても、時間t5で検出される閉路電圧が電圧計測範囲に収まっている。
時間t5から時間tc3になると、組電池5の出力電圧が目標電圧に到達する。これを検出すると、マイクロコンピュータ1は充電設備12による急速充電を終了させる。マイクロコンピュータ1は充電設備12に満充電を実行させる。
上記した急速充電と満充電とでは、供給電流量が異なる。急速充電は満充電よりも供給電流量が大きくなっている。
閉路電圧と開放電圧とには電圧降下分の差がある。そのため、例えば組電池5の最高出力電圧が閉路電圧として検出されたとしても、開放電圧は最高出力電圧に達していないことになる。組電池5のSOCは満充電容量に達していないことになる。
上記の目標電圧は、組電池5の最高出力電圧に基づく値である。マイクロコンピュータ1は組電池5の出力電圧が目標電圧に到達したと判定すると、満充電を充電設備12に実行させる。満充電では、過充電を避けつつ、組電池5のSOCを満充電容量に近づけるため、組電池5の出力電圧を目標電圧に保った状態で、組電池5への充電電力の供給が行われる。目標電圧と最高出力電圧は記憶部22に予め記憶されている。
時間t5から取得周期が経過して時間t6になると、マイクロコンピュータ1は全範囲において監視IC3で検出された電池セル7の閉路電圧を取得する。なおもちろんではあるが、この際、組電池5の出力電圧が目標電圧に到達していることが期待される。そのため、この目標電圧に基づいた電圧計測範囲で閉路電圧を検出してもよい。
(第7実施形態)
第7実施形態を図11に基づいて説明する。
第6実施形態では、図10に基づいて説明したように、非駆動状態から駆動状態に切り換わった際に、マイクロコンピュータ1は全範囲において監視IC3で検出された閉路電圧を取得する例を示した。
これに対して本実施形態では、非駆動状態から駆動状態に切り換わった際に、マイクロコンピュータ1は電池セル7の使用可能範囲において監視IC3で検出された閉路電圧を取得する。これによれば、電池管理装置100が非駆動状態から駆動状態に切り換わった際においても、閉路電圧の検出精度を向上することができる。
例えば図11に示す時間t0になると、電池管理装置100は非駆動状態から駆動状態になる。システムメインリレー6は遮断状態から通電状態になる。組電池5に電流が流れ始める。電池セル7のSOCと閉路電圧それぞれの減少率が増大する。
時間t0から時間t1になるとマイクロコンピュータ1は、図6に示すSOCとOCVの特性データに基づいて、限定計測範囲を設定する。マイクロコンピュータ1は、例えば、図6に示すSOC1とSOC2との間を電池セル7の使用可能範囲と設定する。そしてマイクロコンピュータ1はこれらSOC1とSOC2とに対応するOCV1とOCV2とに基づいて、限定計測範囲を設定する。図11に示すようにマイクロコンピュータ1は、限定計測範囲の下限値をCCV1、上限値をCCV2に設定する。
なお、図6に示す特性データは温度に依存する。そして開放電圧と閉路電圧とには電圧降下分の差がある。そのためにマイクロコンピュータ1は、図6に示す特性データだけではなく、時間t1における電池セル7の温度、電流、劣化具合などを加味して、限定計測範囲を設定してもよい。
他の実施形態で説明してきた全範囲との区別を明瞭とするため、本実施形態では、上記したように、マイクロコンピュータ1は時間t1での電圧計測範囲を限定計測範囲に設定する、と記載した。しかしながら、そもそも電池セル7は使用可能範囲で使用される。そのために検出される閉路電圧はこの使用可能範囲内であることが期待される。したがって、そもそも、使用可能範囲を全範囲と設定してもよい。係る設定は、他の実施形態と変形例にも適用することができる。
(第8実施形態)
第8実施形態を図12に基づいて説明する。
これまでの実施形態では、均等化処理の実施にかかわらず、マイクロコンピュータ1は複数の電池セル7それぞれの閉路電圧を取得する例を示した。これに対して本実施形態では、均等化処理が実施された後において、マイクロコンピュータ1は複数の電池セル7の一部の閉路電圧を取得する。
均等化処理を実施した場合、複数の電池セル7それぞれのSOCが均等化される。そのために複数の電池セル7それぞれの閉路電圧が同等になっていることが期待される。そこで、均等化処理が実施された後において、監視IC3は複数の電池セル7の一部の閉路電圧を検出する。マイクロコンピュータ1は監視IC3で検出された閉路電圧を取得する。これによれば監視IC3とマイクロコンピュータ1の演算処理が簡素化される。
なお、監視IC3は複数の電池セル7のすべての閉路電圧を検出してもよい。そしてマイクロコンピュータ1は監視IC3で検出された複数の閉路電圧のうちの一部を取得してもよい。これによればマイクロコンピュータ1の演算処理が簡素化される。
ただし、均等化を実施してからある程度時間が経過すると、複数の電池セル7のSOCにばらつきが生じる。複数の電池セル7それぞれの閉路電圧が不同になる。
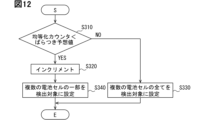
そこでマイクロコンピュータ1は図12に示す取得対象設定処理を実行する。マイクロコンピュータ1はこの取得対象設定処理をサイクルタスクとして実行する。マイクロコンピュータ1はこの取得対象設定処理を他の例えば図4や図10に示す電池管理と並行して実行する。
ステップS310においてマイクロコンピュータ1は、自身が保有している均等化カウンタが、記憶部22に記憶されたばらつき予想値よりも小さいか否かを判定する。均等化カウンタがばらつき予想値よりも小さいと判断すると、マイクロコンピュータ1はステップS320へ進む。均等化カウンタがばらつき予想値以上であると判断すると、マイクロコンピュータ1はステップS330へ進む。
均等化カウンタの値は均等化処理が実行されるとクリアされる。ばらつき予想値は、均等化処理が実行されてから、複数の電池セル7の閉路電圧が不同になることが想定される時間に基づいて決定される。
ステップS320へ進むとマイクロコンピュータ1は、均等化カウンタをインクリメントする。そしてマイクロコンピュータ1はステップS340へ進む。
ステップS340へ進むとマイクロコンピュータ1は、均等化処理の実行された複数の電池セル7のうちの一部のみを、閉路電圧の取得対象(電圧計測対象)にする。例えば、マイクロコンピュータ1は1つの電池群に含まれる複数の電池セル7のうちの1つを、閉路電圧の取得対象にする。例えば、マイクロコンピュータ1は複数の電池群に含まれるすべての電池セル7のうちの1つを、閉路電圧の取得対象にする。そしてマイクロコンピュータ1は取得対象設定処理を終了する。
ステップS310において均等化カウンタがばらつき予想値以上である判断してステップS330へ進むとマイクロコンピュータ1は、複数の電池セル7のすべてを、閉路電圧の取得対象にする。この後にマイクロコンピュータ1は取得対象設定処理を終了する。
均等化処理が実行されたのち、マイクロコンピュータ1はステップS310、S320、S340を繰り返し実行する。この間、均等化処理の実行された複数の電池セル7のうちの一部の閉路電圧のみが取得対象に設定される。
この後、均等化カウンタがばらつき予想値になると、マイクロコンピュータ1はステップS330を繰り返し実行する。これ以降、再び均等化処理が実行されるまで、複数の電池セル7の閉路電圧のすべてが取得対象に設定される。
<他の実施形態>
この明細書の開示は、例示された実施形態に制限されない。開示は、例示された実施形態と、それらに基づく当業者による変形態様を包含する。例えば、開示は、実施形態において示された部品、要素の組み合わせに限定されず、種々変形して実施することが可能である。開示は、多様な組み合わせによって実施可能である。開示は、実施形態に追加可能な追加的な部分をもつことができる。開示は、実施形態の部品、要素が省略されたものを包含する。開示は、一つの実施形態と他の実施形態との間における部品、要素の置き換え、または組み合わせを包含する。開示される技術的範囲は、実施形態の記載に限定されない。開示される技術的範囲は、特許請求の範囲の記載によって示され、さらに特許請求の範囲の記載と均等の意味および範囲内での全ての変更を含むものと解されるべきである。
(その他の変形例)
明細書に開示する目的を達成可能な電池管理装置100は、電池群ごとに監視IC3を有している構成に限定されない。電池管理装置100は、組電池5に対して監視IC3およびマイクロコンピュータ1を有している構成でもよい。電池管理装置100は、電池群ごとに一つのマイクロコンピュータ1を備える構成でもよい。