JP7579164B2 - 荷役車両及び積載装置 - Google Patents
荷役車両及び積載装置 Download PDFInfo
- Publication number
- JP7579164B2 JP7579164B2 JP2021013976A JP2021013976A JP7579164B2 JP 7579164 B2 JP7579164 B2 JP 7579164B2 JP 2021013976 A JP2021013976 A JP 2021013976A JP 2021013976 A JP2021013976 A JP 2021013976A JP 7579164 B2 JP7579164 B2 JP 7579164B2
- Authority
- JP
- Japan
- Prior art keywords
- loading
- arm
- bumper
- switch
- container
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 83
- 238000000034 method Methods 0.000 description 37
- 239000010720 hydraulic oil Substances 0.000 description 4
- 230000001681 protective effect Effects 0.000 description 3
- 230000001154 acute effect Effects 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
Images











Landscapes
- Loading Or Unloading Of Vehicles (AREA)
Description
ところでコンテナ運搬車は、コンテナを車両上に引き上げたり、車両から地上にコンテナを降ろしたりする作業を行うものであるから、これらの作業の際に、バンパーがコンテナと干渉する場合がある。
特許文献1には、車両の傾斜を防ぐジャッキを有し、ジャッキと連動してバンパーの姿勢が変化する構造のコンテナ運搬車が開示されている。
特許文献1に開示されたコンテナ運搬車では、ジャッキを伸ばすとバンパーの姿勢が変わり、積み降ろしの際におけるコンテナとバンパーの干渉を防いでいる。
特許文献1のコンテナ運搬車を使用して、コンテナの積み降ろしを行う場合、作業者は次の手順に則って作業を行う。
即ち、最初にジャッキを動作させ、バンパーを退避させる。
これに続いて荷役アームを動作させ、コンテナの積み下ろしを行う。
しかしながら、荷役アームとジャッキ(バンパー)は、それぞれ独立して操作されるため、作業者が手順を間違え、ジャッキすなわちバンパーを格納せずに積み降ろし作業を行う場合がある。
このような場合、バンパーが後方に突出している状態で、コンテナが移動し、コンテナがバンパーに衝突してしまう懸念がある。
本態様の荷役車両は、この構成に加えて、格納検知手段を有し、バンパー本体が格納位置にあるか否かを確認することができる。本態様の荷役車両では、バンパー本体が格納位置にあることを条件として、荷役アームの動作が開始可能な状態となるから、荷役アームが動作を開始する際には、バンパー本体は必ず格納位置にあり、コンテナがバンパー本体と接触することはない。
前記車両部上に載置された前記コンテナを前記荷役アームによって地上におろす降ろし動作を実施することが可能な荷役車両において、バンパー装置を有し、当該パンパー装置は、バンパー本体を有し、人力によって当該バンパーを走行時に適した走行時位置と、車両側に退避した格納位置に位置変更することが可能であり、前記バンパー本体が前記格納位置にあることを検知する格納位置検知手段を有し、少なくとも前記積み降ろし動作においては、前記バンパー本体が前記格納位置にあることを前記格納位置検知手段が検知していることを条件として、前記荷役アームの動作が開始可能な状態となることを特徴とする荷役車両である。
本態様の荷役車両は、格納検知手段を有し、バンパー本体が格納位置にあるか否かを確認することができる。本態様の荷役車両では、バンパー本体が格納位置にあることを条件として、荷役アームの動作が開始可能な状態となるから、荷役アームが動作を開始する際には、バンパー本体は必ず格納位置にあり、コンテナがバンパー本体と接触することはない。
格納スイッチを操作することによって、バンパー本体を格納位置に移動することができる。そのため、格納スイッチの操作履歴を参照し、降ろしスイッチを操作する前に、格納スイッチが操作されているならば、降ろし動作を行ってもよい場合もある。
本態様によると、降ろしスイッチを操作する前に、格納スイッチが操作されている場合は、例外的に降ろし動作を行うことができる場合がある。
以下の説明において、前後の関係は、荷役車両1の前後を基準とする。即ち前側とは、運転席100側を意味し、後側はその反対側を意味する。
本実施形態の荷役車両1は、脱着ボデー車と称されるコンテナ運搬車であり、コンテナ2を車両上と地上との間で積降ろす荷役アーム3を備えている。
荷役車両1は、図1の様に、車両部5と積載装置17を有している。積載装置17には、制御装置6と、油圧装置7及びバンパー装置50が含まれている。また積載装置17にはリモートコントロール装置(以下 リモコンと称する)8が含まれる。
車両部5は、公知のトラックの車体であり、エンジンを有し、車輪を回転させて道路上を走行するものである。
積載装置17は、コンテナ2を車両部5と地上との間で積み降ろしする装置であり、車両部5に搭載されている。
コンテナ載置部11は、コンテナ2を載置するフレームであり、前端に、門型の防護枠12を有している。防護枠12には、初期位置検知手段15が設けられている。初期位置検知手段15は、公知の近接センサーや光電センサー等であり、荷役アーム3が、走行姿勢である初期位置に移動しているか否かを検知するものである。なお初期位置検知手段15は、リミットスイッチ等の機械的なスイッチでもよい。
荷役アーム3は、リフトアーム21の先端側に、フックアーム20が角度をつけた姿勢で揺動可能に取り付けられたものであり、全体形状が、略「L」状を呈している。フックアーム20とリフトアーム21の間には油圧シリンダ22が取り付けられており、フックアーム20は油圧シリンダ22を伸縮することによってリフトアーム21に対する角度が変化する。
フックアーム20の先端には、フック(係合部)23が設けられている。
リフトアーム21の基端側は、車両部5に揺動可能に取りけられており、荷役アーム3は、全体として揺動可能である。またリフトアーム21には、油圧シリンダ25が取り付けられており、当該油圧シリンダ25によって、荷役アーム3が全体的に揺動する。
バンパー本体10は、車両部5の幅方向にのびるバー状や板状の部材である。バンパー本体10は、公知のそれと同様、衝突に対する衝撃を緩和したり、他の車両が車両部5の下に潜り込んだりすることを防ぐものである。
バンパー移動機構52には、図示しないガイドがあり、油圧シリンダ53を伸縮することによって、バンパー本体10を前後方向に平行移動する。
バンパー移動機構52の構造は限定するものではなく、リンク機構を採用したものや、モータによってバンパー本体10を移動させるものであってもよい。
また単にバンパー本体10を水平方向に移動するだけでなく、高さ方向にも変位させることができるものであってもよい。
本実施形態では油圧シリンダ53を伸ばして、バンパー本体10を後方に張り出した位置が走行時位置であり、油圧シリンダ53を縮めてバンパー本体10を前方に配置した位置が格納位置である。
格納検知手段55及び張出検知手段56は、公知の近接センサーや光電センサー等である。格納検知手段55は、リミットスイッチ等の機械的なスイッチでもよい。
油圧ポンプは、車両部5のエンジンから動力伝動を受けて回転する。即ち油圧装置7は、車両部5のPTO軸に接続されており、作業者が図示しないPTOスイッチを操作することによって油圧ポンプが回転し、油圧を発生させる。
油圧装置7には、油圧シリンダ22に油圧を供給する電磁弁と、油圧シリンダ25に油圧を供給する電磁弁と、油圧シリンダ53に油圧を供給する電磁弁が設けられている(いずれも図示せず)。
制御装置6は、リモコン8と通信する通信手段を有している。
またリモコン8には、バンパー移動機構52を動作させるバンパー作動スイッチとして、バンパー張出スイッチ67及びバンパー格納スイッチ68が装備されている。
これらのスイッチ60、61、65、66は、いずれもボタンスイッチであり、作業者が押している間だけオン状態となり、手を離すとオフ状態となる。
自動降ろし動作は、自動降ろしスイッチ60を押すことによって開始され、自動降ろしスイッチ60を押し続けることによって実行される。
従って、自動降ろしスイッチ60は、降ろし動作を実施する降ろしスイッチであり、降ろし動作を開始する機能と、降ろし動作を継続する機能を有している。
自動積み込み動作は、自動積み込みスイッチ61を押すことによって開始され、自動積み込みスイッチ61を押し続けることによって実行される。
従って、自動積み込みスイッチ61は、積み込み動作を実施する積み込みスイッチであり、積み込み動作を開始する機能と、積み込み動作を継続する機能を有している。
手動降ろしスイッチ65を操作することにより、手動降ろし動作を行うことができる。
手動降ろし動作は、手動降ろしスイッチ65を押すことによって開始され、手動降ろしスイッチ65を押し続けることによって実行される。
従って、手動降ろしスイッチ65は、降ろし動作を実施する降ろしスイッチであり、降ろし動作を開始する機能と、降ろし動作を継続する機能を有している。
手動積み込み動作は、手動積み込みスイッチ66を押すことによって開始され、手動積み込みスイッチ66を押し続けることによって実行される。
従って、手動積み込みスイッチ66は、積み込み動作を実施する積み込みスイッチであり、積み込み動作を開始する機能と、積み込み動作を継続する機能を有している。
バンパー張出スイッチ67及びバンパー格納スイッチ68は、バンパー移動機構52の油圧シリンダ53に作動油を供給する電磁弁を切り替えるスイッチである。
バンパー格納スイッチ68を押し続けると、バンパー本体10が前方に移動し、格納位置に向かう。バンパー本体10が走行時位置から離れると、張出検知手段56が非検知状態となる。バンパー本体10が前方に移動し、格納位置に至ると格納検知手段55が検知状態となる。
地上に設置されたコンテナ2を、車両部5に搭載する際には、図1、図2(a)の様に、積載装置17のフック(係合部)23をコンテナ2の係合ピン27に係合する。このときフックアーム20は、リフトアーム21に対してやや鋭角姿勢となっている。
そしてその状態で、リフトアーム21を前方(図面反時計回り)に向かって揺動する。
その結果、図2(b)の様に、コンテナ2の前方側が吊り上げられ、図2(c)の様に、車両部5に引き入れられる。そして、図3(d)の様にリフトアーム21をさらに揺動させて、リフトアーム21の姿勢を略水平に戻す。
その結果、コンテナ2の姿勢が略水平姿勢となり、係合ピン27を前方に向けた状態で、荷役車両1に搭載される。その後、図3(e)の様にフックアーム20を揺動して、リフトアーム21に対して垂直姿勢に近づけ、コンテナ2を前方にスライドさせる。
コンテナ2の荷役車両1への搭載が完了した状態は、図3(f)の様であり、フックアーム20が略垂直姿勢となり、フックアーム20が防護枠12に近接し、荷役アーム3が、初期位置に復帰していることが初期位置検知手段15で検知される。
荷役車両1から、コンテナ2を下ろす際には、図4、図5の様に、フックアーム20を後方(図面時計回り)に揺動させてから、リフトアーム21を傾斜姿勢に変化させる。その結果、コンテナ2は、ゆっくりと地上に降ろされる。
即ち、図4(c)の様に、フックアーム20を後方(図面時計回り)に揺動して、リフトアーム21を鋭角に姿勢変更し、コンテナ2を後方にスライドさせる。
続いて、図5(d)の様にリフトアーム21を後方(図面時計回り)に揺動してリフトアーム21の姿勢を傾斜させる。図5(e)の様にリフトアーム21をさらに後方(図面時計回り)に揺動し、コンテナ2の後端を地面に着地させる。
そして、リフトアーム21をさらに後方(図面時計回り)に揺動すると共に、フックアーム20をやや前方(図面反時計回り)に揺動し、図5(f)の様にコンテナ2の前端を着地させ、コンテナ2を地上に降ろす。
自動降ろし動作においては、荷役アーム3とバンパー装置50が連携して動作する。即ち自動降ろし動作においては、荷役アーム3とバンパー装置50が一連のシーケンス制御によって動作する。
本実施形態で採用するリモコン8は、自動降ろしスイッチ60を有している。そして、自動降ろしスイッチ60を押し続けている間、一連のバンパー動作と降ろし動作が継続する。
また図4(a)の様に バンパー本体10は、油圧シリンダ53が伸びた状態であり、バンパー本体10は、後方に張り出して走行時位置にある。そのため、張出検知手段56が検知状態となる。また格納検知手段55は非検知状態となっている。
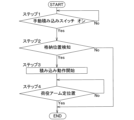
以下、図7のフローチャートに基づいて自動降ろし動作の制御を説明する。
前提条件として、作業者が図示しないPTOスイッチを操作し、油圧ポンプが回転し、油圧が発生し、各電磁弁の開閉によって、各油圧シリンダ22、25、53に作動油を供給可能な状態となっている。
ステップ1で、自動降ろしスイッチ60が操作されるのを待つ。作業者が自動降ろしスイッチ60を押すことにより、自動降ろしスイッチ60がオン状態となり、ステップ2に移行する。
通常、自動降ろし動作の開始時点では、バンパー本体10は、走行時位置にあるから、多くの場合、ステップ2は、NOとなり、ステップ3に移行する。
即ち、自動降ろし動作においては、バンパー本体10が格納位置にあることを格納検知手段55が検知していることを条件として、荷役アーム3の動作(すなわち、降ろし動作の最初の動作である、フックアーム20の後方への揺動)が開始可能な状態となる様に制御されており、降ろし動作を開始するために自動降ろしスイッチ60を操作した際に、格納検知手段55が非検知状態であるならば降ろし動作は開始されない。
その結果、バンパー移動機構52の油圧シリンダ53が収縮し、バンパー本体10が、車両部5の前方側に移動する。
そしてステップ4に移行し、一定時間が経過しているか否かを判断する。一定時間が経過していなければ、ステップ2に戻り、以下、ステップ3、ステップ4、ステップ2を繰り返す。
前記した様に、バンパー本体10が格納位置にあることを格納検知手段55が検知していることを条件として、荷役アーム3の動作が開始可能な状態となる様に制御されているから、格納検知手段55が、バンパー本体10が格納位置にあることを検知した段階で、荷役アーム3の動作の開始条件が充足される。
降ろし動作が完了すると、ステップ6がYESとなり、一連の自動降ろし動作が終了する。
本実施形態によると、バンパー本体10が格納位置に移動したことを確認した後に、荷役アーム3を動作させるので、コンテナがバンパーに接触することはない。
即ち、一定時間の間、降ろし動作が始まらなければ、通常の作業者の行動として、バンパー装置50の作動状態を確認する。そして、バンパー本体10が、十分に車両側に引き込んでいるならば、降ろし動作を開始しても不具合は無い。
そこで本実施形態では、作業者がバンパー装置50を確認するのに十分な時間を確保し、この時間が経過した場合は、例外的に降ろし動作を行うことができるようになっている。
格納検知手段55がバンパー本体10が格納位置にあることを検知できない状態においての降ろし動作の開始は、一定時間の経過後に自動的に実行されてもよいし、作業者が格納されたことを目視したときには押下する確認スイッチ等を操作した後に実行されてもよい。
以下、図8のフローチャートに基づいて自動積み込み動作の制御を説明する。
ステップ1で、自動積み込みスイッチ61が操作されるのを待つ。作業者が自動積み込みスイッチ61を押すことにより、自動積み込みスイッチ61がオン状態となり、ステップ2に移行する。
通常、自動積み込み動作の開始時点では、バンパー本体10は、格納位置にあるから、多くの場合、ステップ2はYESとなり、ステップ5に移行し、積み込み動作が始まる。
何らかの理由で格納検知手段55がバンパー本体10が格納位置にあることを検知できない場合は、ステップ3に移行する。
即ち、自動積み込み動作においても、バンパー本体10が格納位置にあることを格納検知手段55が検知していることを条件として、荷役アーム3の動作が開始可能な状態となる様に制御されており、積み込み動作を開始するために自動積み込みスイッチ61を操作した際に、格納検知手段55が非検知状態であるならば積込動作(リフトアーム21の前方向への揺動)は開始されない。
そしてステップ4に移行し、一定時間が経過しているか否かを判断する。一定時間が経過していなければ、ステップ2に戻り、以下、ステップ3、ステップ4、ステップ2を繰り返す。
ステップ7では、自動積み込みスイッチ61のオン状態が、電気的に自己保持される。その結果、作業者が、自動積み込みスイッチ61から手を離しても、ステップ8以降の工程が継続される。
続くステップ8は、バンパー移動機構52の油圧シリンダ53に作動油を供給する電磁弁が切り替えられる。
その結果、バンパー移動機構52の油圧シリンダ53が伸び、バンパー本体10が、車両部5の後方側に移動し、バンパー本体10が走行時位置に至る。
そのため、バンパー本体10が格納位置にある状態で、荷役車両1が走り出してしまうことを防ぐことができる。
バンパー本体10が走行時位置に至ったことを張出検知手段56が検知すると、ステップ9がYESとなり、一連の自動積み込み動作が終了する。
また本実施形態の荷役車両1では、リモコン8に手動降ろしスイッチ65と手動積み込みスイッチ66があり、これら操作してコンテナ2の積み降ろしを行うこともできる。即ち、手動降ろしスイッチ65を操作して手動積み降ろし動作を行うことができる。また手動積み込みスイッチ66を操作して、手動積み込み動作を行うことができる。
手動積み降ろし動作においても、バンパー本体10が格納位置にあることを格納検知手段55が検知していることを条件として、荷役アーム3の動作が開始可能な状態となる。
即ち本実施形態では、手動降ろしスイッチ65が押された際に、バンパー本体10が格納位置にあることが確認できない場合には、手動降ろしスイッチ65が無効状態となり、荷役アーム3は動作しない。
図9のフローチャートに基づいて手動降ろし動作の制御を説明すると、ステップ2で、格納検知手段55のオンオフ状態から、バンパー本体10が格納位置にあるか否かを確認し、バンパー本体10が格納位置になければ以後の動作(リフトアーム21の後方への揺動(図5d))を実施することなく終了する。
その後、再度、手動降ろしスイッチ65が押されると、ステップ2がYESとなり、ステップ3に移行して一連の降ろし動作が実行される。
降ろし動作が完了すると、ステップ4がYESとなり、一連の手動降ろし動作が終了する。
即ち本実施形態では、手動積み込みスイッチ66が押された際に、バンパー本体10が格納位置にあることが確認できない場合には、手動積み込みスイッチ66が無効状態となり、荷役アーム3は動作しない。
図10のフローチャートに基づいて手動積み込み動作の制御を説明すると、ステップ2で、格納検知手段55のオンオフ状態から、バンパー本体10が格納位置にあるか否かを確認し、バンパー本体10が格納位置になければ以後の動作を実施することなく終了する。
その後、再度、手動積み込みスイッチ66が押されると、ステップ2がYESとなり、ステップ3に移行して一連の積み込み動作が実行される。
荷役アーム3が初期位置に戻ったことを初期位置検知手段15が検知すると、ステップ4がYESとなり、一連の手動積み込み動作が終了する。
この制御に代わって、支障のない範囲で、降ろし動作を実行し、その後に制御を中断したり、終了したりしてもよい。あるいは、支障のない範囲で降ろし動作を行い、その後で、バンパー本体10が格納位置にあるか否かを検知してもよい(図7 図9 ステップ2)。
例えば、フックアーム20を後方への揺動する動作をしても、コンテナ等とバンパー本体10とが接触することはない。そこで、フックアーム20を後方に揺動させた後に、制御を終了してもよく、フックアーム20を後方に揺動させた後に、バンパー本体10が格納位置にあるか否かを検知してもよい。
なおリフトアーム21を揺動させることは推奨されない。
これに対して、降ろし動作等が開始するための条件に、他の条件を加えてもよい。また上記した条件に代わる要件を満足することにより、降ろし動作等を開始することができる構成としてもよい。
例えば、ステップ01で、バンパー格納スイッチ68がオン状態となり、ステップ02でこの状態が所定時間に渡って維持されていたという経緯を経て、ステップ2に至り、格納検知手段55の検知状態を確認することとなった場合に限り、作業者が自動降ろしスイッチ60を押し続けると、一連の降ろし動作等が開始される。
ステップ02の「所定時間」は、バンパー格納スイッチ68をオンすることによって、バンパー本体10が格納位置に至るのに要する時間が基準となり、ステップ4の「一定時間」は、自動的にバンパー本体10が、格納位置に至るのに要する時間が基準となる。従って、ステップ4の「一定時間」を、ステップ02の「所定時間」よりも長く設定することが望ましい。
ステップ01で、格納スイッチ68がオンされていなければステップ1に移行し、前記したフローチャートと同様に、自動降ろしスイッチ60が操作されるのを待つ。またステップ01、ステップ02を経てステップ1に至る場合もある。
ステップ2に至るまでに、ステップ02を経由していたならば、ステップ3に移行し、降ろし動作を開始する。
ステップ2に至るまでに、ステップ02を経由していなければ、制御を終了する。
この場合でも、格納検知手段55は必須であり、格納検知手段55が、バンパー本体10が格納位置にあることを検知していることを条件として、荷役アーム3を駆動(リフトアームを後方へ揺動開始)させる。
またバンパー本体10を人力で動かす構造を採用する場合には、格納位置側係止機構をシリンダ等の動力で駆動することが望ましい。
これに対して、スライド式と称される荷役アームが知られており、当該荷役アームは、一部の部材が直線移動する。
本発明は、スイング式の荷役アーム3を採用するものに限定されるものではなく、スライド式の荷役アームを採用する荷役車両にも適用することができる。
しかしながら本発明は、このスイッチを採用するものに限定されず、一旦オンスイッチを操作すると、オフ操作を行うまでオン状態が維持される場合(オルタネイトスイッチ)や、電気的にオン状態を自己保持させるスイッチを採用することもできる。
2 コンテナ
3 荷役アーム
5 車両部
6 制御装置
7 油圧装置
8 リモコン
10 バンパー本体
11 コンテナ載置部
15 初期位置検知手段
17 積載装置
20 フックアーム
21 リフトアーム
23 フック(係合部)
50 バンパー装置
52 バンパー移動機構
55 格納検知手段
56 張出検知手段
60 自動降ろしスイッチ
61 自動積み込みスイッチ
66 手動積み込みスイッチ
67 バンパー張出スイッチ
68 バンパー格納スイッチ
Claims (5)
- 車両部と積載装置とを有し、前記車両部に前記積載装置が搭載された荷役車両であって、
前記積載装置は、コンテナを搭載するものであり、荷役アームと、少なくとも前記荷役アームを制御する制御装置と、前記荷役アームを動作させるアーム作動スイッチとを有し、
前記荷役アームは前記コンテナと係合する係合部を備え、
地上に置かれた前記コンテナに前記係合部を係合し、前記荷役アームを駆動して前記コンテナを前記車両部上に引き入れる積み込み動作と、
前記車両部上に載置された前記コンテナを前記荷役アームによって地上におろす降ろし動作を実施することが可能な荷役車両において、
バンパー装置を有し、当該パンパー装置は、バンパー本体を有し、動力によって当該バンパーを走行時に適した走行時位置と、車両側に退避した格納位置に位置変更することが可能であり、
前記バンパー本体を前記走行時位置に移動させる張出スイッチと、前記バンパー本体を格納位置に移動させる格納スイッチとを有し、
前記バンパー本体が前記格納位置にあることを検知する格納位置検知手段を有し、
少なくとも前記積み降ろし動作においては、前記バンパー本体が前記格納位置にあることを前記格納位置検知手段が検知していることを条件として、前記荷役アームの動作が開始可能な状態となり、さらに、
前記アーム作動スイッチとして前記積み込み動作を実施する積込スイッチがあり、
前記積み込み動作が完了したことを条件として、前記バンパー本体を走行時位置に復帰させることが可能となることを特徴とする荷役車両。 - 車両部と積載装置とを有し、前記車両部に前記積載装置が搭載された荷役車両であって、
前記積載装置は、コンテナを搭載するものであり、荷役アームと、少なくとも前記荷役アームを制御する制御装置と、前記荷役アームを動作させるアーム作動スイッチとを有し、
前記荷役アームは前記コンテナと係合する係合部を備え、
地上に置かれた前記コンテナに前記係合部を係合し、前記荷役アームを駆動して前記コンテナを前記車両部上に引き入れる積み込み動作と、
前記車両部上に載置された前記コンテナを前記荷役アームによって地上におろす降ろし動作を実施することが可能な荷役車両において、
バンパー装置を有し、当該パンパー装置は、バンパー本体を有し、人力によって当該バンパーを走行時に適した走行時位置と、車両側に退避した格納位置に位置変更することが可能であり、
前記バンパー本体が前記格納位置にあることを検知する格納位置検知手段を有し、
少なくとも前記積み降ろし動作においては、前記バンパー本体が前記格納位置にあることを前記格納位置検知手段が検知していることを条件として、前記荷役アームの動作が開始可能な状態となり、さらに、
前記アーム作動スイッチとして前記積み込み動作を実施する積込スイッチがあり、
前記積み込み動作が完了したことを条件として、前記バンパー本体を走行時位置に復帰させることが可能となることを特徴とする荷役車両。 - 車両部と積載装置とを有し、前記車両部に前記積載装置が搭載された荷役車両であって、
前記積載装置は、コンテナを搭載するものであり、荷役アームと、少なくとも前記荷役アームを制御する制御装置と、前記荷役アームを動作させるアーム作動スイッチとを有し、
前記荷役アームは前記コンテナと係合する係合部を備え、
地上に置かれた前記コンテナに前記係合部を係合し、前記荷役アームを駆動して前記コンテナを前記車両部上に引き入れる積み込み動作と、
前記車両部上に載置された前記コンテナを前記荷役アームによって地上におろす降ろし動作を実施することが可能な荷役車両において、
バンパー装置を有し、当該パンパー装置は、バンパー本体を有し、動力によって当該バンパーを走行時に適した走行時位置と、車両側に退避した格納位置に位置変更することが可能であり、
前記バンパー本体を前記走行時位置に移動させる張出スイッチと、前記バンパー本体を格納位置に移動させる格納スイッチとを有し、
前記バンパー本体が前記格納位置にあることを検知する格納位置検知手段を有し、
少なくとも前記積み降ろし動作においては、前記バンパー本体が前記格納位置にあることを前記格納位置検知手段が検知していることを条件として、前記荷役アームの動作が開始可能な状態となり、さらに、
前記アーム作動スイッチとして前記降ろし動作を開始する降ろしスイッチがあり、
前記格納スイッチを所定時間操作した後であって、前記降ろし動作を開始するために前記降ろしスイッチを操作した際、前記バンパー本体が前記格納位置にあることを前記格納位置検知手段が検知していない場合は、自動的に、又は他の要件を満足することを条件として、前記降ろし動作が開始されることを特徴とする荷役車両。 - 車両に搭載され、コンテナを搭載する積載装置であって、
前記コンテナを載置するコンテナ載置部と、荷役アームと、少なくとも前記荷役アームを制御する制御装置と、前記荷役アームを動作させるアーム作動スイッチとを有し、
前記荷役アームは前記コンテナと係合する係合部を備え、
地上に置かれた前記コンテナに前記係合部を係合し、前記荷役アームを駆動して前記コンテナを前記コンテナ載置部に引き入れる積み込み動作と、
前記コンテナ載置部に載置された前記コンテナを前記荷役アームによって地上におろす降ろし動作を実施することが可能な積載装置において、
バンパー装置を有し、当該パンパー装置は、バンパー本体を有し、動力によって当該バンパーを走行時に適した走行時位置と、車両側に退避した格納位置に位置変更することが可能であり、
前記バンパー本体を前記走行時位置に移動させる張出スイッチと、前記バンパー本体を格納位置に移動させる格納スイッチとを有し、
前記バンパー本体が前記格納位置にあることを検知する格納位置検知手段を有し、
少なくとも前記積み降ろし動作においては、前記バンパー本体が前記格納位置にあることを前記格納位置検知手段が検知していることを条件として、前記荷役アームの動作が開始可能な状態となり、さらに、
前記アーム作動スイッチとして前記積み込み動作を実施する積込スイッチがあり、
前記積み込み動作が完了したことを条件として、前記バンパー本体を走行時位置に復帰させることが可能となることを特徴とする積載装置。 - 車両に搭載され、コンテナを搭載する積載装置であって、
前記コンテナを載置するコンテナ載置部と、荷役アームと、少なくとも前記荷役アームを制御する制御装置と、前記荷役アームを動作させるアーム作動スイッチとを有し、
前記荷役アームは前記コンテナと係合する係合部を備え、
地上に置かれた前記コンテナに前記係合部を係合し、前記荷役アームを駆動して前記コンテナを前記コンテナ載置部に引き入れる積み込み動作と、
前記コンテナ載置部に載置された前記コンテナを前記荷役アームによって地上におろす降ろし動作を実施することが可能な積載装置において、
バンパー装置を有し、当該パンパー装置は、バンパー本体を有し、動力によって当該バンパーを走行時に適した走行時位置と、車両側に退避した格納位置に位置変更することが可能であり、
前記バンパー本体を前記走行時位置に移動させる張出スイッチと、前記バンパー本体を格納位置に移動させる格納スイッチとを有し、
前記バンパー本体が前記格納位置にあることを検知する格納位置検知手段を有し、
少なくとも前記積み降ろし動作においては、前記バンパー本体が前記格納位置にあることを前記格納位置検知手段が検知していることを条件として、前記荷役アームの動作が開始可能な状態となり、さらに、
前記アーム作動スイッチとして前記降ろし動作を開始する降ろしスイッチがあり、
前記格納スイッチを所定時間操作した後であって、前記降ろし動作を開始するために前記降ろしスイッチを操作した際、前記バンパー本体が前記格納位置にあることを前記格納位置検知手段が検知していない場合は、自動的に、又は他の要件を満足することを条件として、前記降ろし動作が開始されることを特徴とする積載装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021013976A JP7579164B2 (ja) | 2021-01-29 | 2021-01-29 | 荷役車両及び積載装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021013976A JP7579164B2 (ja) | 2021-01-29 | 2021-01-29 | 荷役車両及び積載装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022117346A JP2022117346A (ja) | 2022-08-10 |
| JP7579164B2 true JP7579164B2 (ja) | 2024-11-07 |
Family
ID=82749719
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021013976A Active JP7579164B2 (ja) | 2021-01-29 | 2021-01-29 | 荷役車両及び積載装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7579164B2 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000326807A (ja) | 1999-05-21 | 2000-11-28 | Morita Econos Ltd | コンテナ積載車のリヤバンパ移動制御装置 |
| JP2010274849A (ja) | 2009-05-29 | 2010-12-09 | Kyokuto Kaihatsu Kogyo Co Ltd | 荷役車両 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4410207A (en) * | 1981-12-21 | 1983-10-18 | Dempster Systems Inc. | Bumper structure for vehicle having tiltable load carrier member |
| JP2553228Y2 (ja) * | 1991-10-14 | 1997-11-05 | 日産ディーゼル工業株式会社 | 車両のリヤバンパ装置 |
-
2021
- 2021-01-29 JP JP2021013976A patent/JP7579164B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000326807A (ja) | 1999-05-21 | 2000-11-28 | Morita Econos Ltd | コンテナ積載車のリヤバンパ移動制御装置 |
| JP2010274849A (ja) | 2009-05-29 | 2010-12-09 | Kyokuto Kaihatsu Kogyo Co Ltd | 荷役車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022117346A (ja) | 2022-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7579164B2 (ja) | 荷役車両及び積載装置 | |
| JP7579163B2 (ja) | 荷役車両及び積載装置 | |
| US5088879A (en) | Forward tilt limit system for lift trucks | |
| US3799373A (en) | Valve actuator & safety hook mechanism for vertical closing tailgate | |
| JP3866931B2 (ja) | コンテナ積み降ろし車両 | |
| JP7614895B2 (ja) | 荷役車両及び積載装置 | |
| JP7854493B2 (ja) | 荷役車両及び積載装置 | |
| JP7701792B2 (ja) | 荷役車両及び積載装置 | |
| JP7581097B2 (ja) | 荷役車両及び積載装置 | |
| JP7610441B2 (ja) | 荷役車両及び積載装置 | |
| JP2009001152A (ja) | 荷受台昇降装置 | |
| JP4912930B2 (ja) | 貨物自動車の荷台傾斜装置 | |
| JP2010058752A (ja) | コンテナ荷役車両用誤積載防止装置 | |
| JP7198108B2 (ja) | コンテナおよびコンテナ荷役車両 | |
| JP3030035U (ja) | 車両の荷役補助装置 | |
| JP4723976B2 (ja) | 作業車両及びコンテナ荷役車両 | |
| WO2008149877A1 (ja) | フォ-クリフト | |
| JP7728726B2 (ja) | ダンプトラック | |
| JPS6137546Y2 (ja) | ||
| JP2000062517A (ja) | 荷役車両 | |
| JPS6222432Y2 (ja) | ||
| JP2010184510A (ja) | 車両用床下格納式荷役装置 | |
| JP4262500B2 (ja) | フォークリフトのパレットロック装置 | |
| JP4451272B2 (ja) | 荷受台昇降装置 | |
| JPH024829Y2 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231017 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240314 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240314 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240509 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240905 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20241002 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241025 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7579164 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |