JP7676041B2 - ロボット装置 - Google Patents
ロボット装置 Download PDFInfo
- Publication number
- JP7676041B2 JP7676041B2 JP2023119547A JP2023119547A JP7676041B2 JP 7676041 B2 JP7676041 B2 JP 7676041B2 JP 2023119547 A JP2023119547 A JP 2023119547A JP 2023119547 A JP2023119547 A JP 2023119547A JP 7676041 B2 JP7676041 B2 JP 7676041B2
- Authority
- JP
- Japan
- Prior art keywords
- hollow
- robot
- rotation
- center
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Manipulator (AREA)
Description
そして、このような構成により、サーボモータ102が発生する回転力により処理部105を含む一体物110が直線的に駆動される。さらに、サーボモータ102を通電制御して加圧力を増減することにより、処理後のワーク品質を向上することができる。
例えば、サーボモータ102の出力軸102a、ボールねじ103のねじ軸部103b、および、処理部105を直列的に接続すると、効果器は、全体としてサーボモータ102の回転中心の方向に長くなってしまう(図4(a)参照。)。
そこで、駆動部101を備えるロボット装置100において、効果器の占有スペースを低減することができる新規な態様が求められている。
そして、処理部は、ボールねじのナット部およびスライド部と一体物を形成し、回転中空軸の回転中心の方向の一方側で、ロボットに対して回転中心の方向に相対移動し、回転中空軸とねじ軸部とは、中空モータの内部でパワーロックにより締結されている。
これにより、本開示によれば、潜在的に、駆動部により加圧力を増減するロボット装置において、効果器の占有スペースを低減することができる。
実施例のロボット装置1の構成を、図1~図3を用いて説明する。
ロボット装置1は、例えば、先端に複数の効果器を有する多関節のロボット2、ならびに、効果器およびロボット2を制御する制御部3等を備え、ロボット2を制御して効果器を3次元的に移動させつつ効果器を制御してワーク(図示せず。)に所定の処理を施すものである。
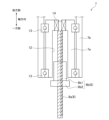
まず、中空モータ7は、ヘムローラ4をロボット2に対して相対移動させるための回転力を発生するものであり、次の回転中空軸7aを有する。すなわち、回転中空軸7aは、円筒状の筒体であって中空モータ7の回転中心と同軸の中空12を有する。そして、回転中空軸7aは、回転中心の周囲に回転するものであって中空モータ7の回転子をなす(以下、回転中心の方向を軸方向と呼ぶことがある。)。
また、中空12の軸方向一方側は、中空モータ7の外部に開口しており、中空12の軸方向他方側は、回転中空軸7aとボールねじ8のねじ軸部8aとの締結構造であるパワーロック14により閉じられている。
まず、ねじ軸部8aは、中空12に回転中空軸7aと同軸に収容されており、回転中空軸7aと中空モータ7の内部でパワーロック14により締結されている。そして、ボールねじ8は、中空モータ7が発生する回転力を直線的な力に変換してヘムローラ4に伝達する。また、軸方向に関して、軸方向他方側の軸受け13が存在する範囲と、パワーロック14が存在する範囲とが重なっている(図3参照。)。
実施例のロボット装置1は、ロボット2の効果器として、次の処理部4および駆動部5を備える。すなわち、処理部4は、ワークに対し力を及ぼしながら所定の処理を施すものであり、駆動部5は、処理部4をロボット2に対して相対移動するように駆動することで、加圧力を増減するものである。
さらに、スライド機構9は、ロボット2に固定された案内部9b、および、案内部9bに対して直線移動することができるスライド部9aを有し、スライド部9aの移動方向が軸方向である。
これにより、駆動部5により加圧力を増減するロボット装置1において、効果器の占有スペースを低減することができる。
このため、効果器全体として軸方向の長さを低減することができるので、効果器の占有スペースを低減することができる。
しかし、回転中空軸7aからねじ軸部8aへの回転力の伝達は加圧力の増減が目的なので、そもそも、回転中空軸7aを高速で回転させる必要がない。このため、高剛性のパワーロック14でも、回転中空軸7aからねじ軸部8aへ回転力を充分に伝達しつつ、軸ずれを吸収することができる。
以上により、ロボット装置1によれば、回転中空軸7aとねじ軸部8aとの締結部としてパワーロック14を採用することで、効果器の占有スペースを更に低減することができる。
これにより、軸方向に垂直な方向への効果器の拡大を抑えることができるとともに、ボールねじ8を簡便に交換することができる。
一方で、ボールねじ8は、消耗品であって交換する必要があるので、中空12にブラケット8b2が存在すると、簡便に交換することができない。
これにより、軸方向に垂直な方向への効果器の拡大を抑えることができるとともに、ボールねじ8を簡便に交換することができる。
これにより、ねじ軸部8aの回転を安定させることができる。
これにより、効果器全体として軸方向の長さを、更に低減することができるので、効果器の占有スペースを、更に低減することができる。
実施例は具体的な一例を開示するものであり、本発明が実施例に限定されないことは言うまでもない。
例えば、実施例のロボット装置1によれば、処理部4は、ワークにヘミング加工を施すヘムローラ4であったが、処理部4の態様はヘムローラ4に限定されない。例えば、処理部4として、ワーク表面を研磨する研磨ツールを採用してもよい。
Claims (4)
- ロボットの効果器として、
ワークに対し力を及ぼしながら所定の処理を施す処理部と、
この処理部を前記ロボットに対して相対移動するように駆動することで、前記処理部が前記ワークに及ぼす力を増減する駆動部とを備えるロボット装置において、
前記駆動部は、
前記処理部を前記ロボットに対して相対移動させるための回転力を発生するものであり、回転中心と同軸の中空を有してこの回転中心の周囲に回転する回転中空軸を有し、この中空の前記回転中心の方向の少なくとも一方側が外部に開口している中空モータと、
前記中空に前記回転中空軸と同軸に収容されて前記回転中空軸と締結されるねじ軸部を有し、前記中空モータが発生する回転力を直線的な力に変換して前記処理部に伝達するボールねじと、
前記ロボットに固定された案内部、および、この案内部に対して直線移動することができるスライド部を有し、このスライド部の移動方向が前記回転中心の方向に一致するスライド機構とを有し、
前記処理部は、前記ボールねじのナット部および前記スライド部と一体物を形成し、前記回転中空軸の前記回転中心の方向の一方側で、前記ロボットに対して前記回転中心の方向に相対移動し、
前記回転中空軸と前記ねじ軸部とは、前記中空モータの内部でパワーロックにより締結されていることを特徴とするロボット装置。 - 請求項1に記載のロボット装置において、
前記ナット部は、本体から外側に広がって前記一体物を形成するために利用されるブラケットを有し、
このブラケットは、前記回転中心に垂直な所定の方向の長さが前記中空の径よりも大きく、
前記処理部の前記回転中心の方向への前記ロボットに対する相対移動に伴い、前記ブラケットは、前記中空の外側であって前記回転中心の方向の一方側で、前記回転中心の方向に移動し、前記本体の内、前記ブラケットよりも前記回転中心の方向の他方側に存在する部分は、前記中空に対して出入りすることを特徴とするロボット装置。 - 請求項1に記載のロボット装置において、
前記回転中心の方向に関して、前記パワーロックが存在する範囲と、前記回転中空軸の軸受けが存在する範囲とが重なることを特徴とするロボット装置。 - 請求項2に記載のロボット装置において、
前記駆動部は、前記中空モータが搭載されるとともに前記ロボットに固定される台座を有し、
この台座は、前記中空モータの前記回転中心の方向の一方側に固定され、
前記回転中心の方向の一方側から視たときに、前記中空の開口は、前記台座、および、前記スライド機構により包囲されており、
前記一体物が前記回転中心の方向に関して最も他方側に存在するときに、前記回転中心の方向に関して、前記台座が存在する範囲と、前記ブラケットが存在する範囲とが重なることを特徴とするロボット装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023119547A JP7676041B2 (ja) | 2023-07-24 | 2023-07-24 | ロボット装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023119547A JP7676041B2 (ja) | 2023-07-24 | 2023-07-24 | ロボット装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2025016831A JP2025016831A (ja) | 2025-02-05 |
| JP7676041B2 true JP7676041B2 (ja) | 2025-05-14 |
Family
ID=94396680
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023119547A Active JP7676041B2 (ja) | 2023-07-24 | 2023-07-24 | ロボット装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7676041B2 (ja) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000343231A (ja) | 1999-06-04 | 2000-12-12 | Obara Corp | 電動溶接機におけるモ―タ一体型駆動ユニット |
-
2023
- 2023-07-24 JP JP2023119547A patent/JP7676041B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000343231A (ja) | 1999-06-04 | 2000-12-12 | Obara Corp | 電動溶接機におけるモ―タ一体型駆動ユニット |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2025016831A (ja) | 2025-02-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5269344B2 (ja) | スカラ型ロボット構造と対応ロボット | |
| US11668362B2 (en) | Actuator and brake | |
| JP2659998B2 (ja) | リニアアクチュエータ | |
| US6433447B1 (en) | Linear/rotary actuator | |
| CN103286774A (zh) | 多轴机械手的铰接式结构及包括这种结构的机械手 | |
| JP5038029B2 (ja) | ロボット | |
| JP2000288792A (ja) | プレス加工機 | |
| JP6811575B2 (ja) | リニアアクチュエータおよびリニアアクチュエータ装置 | |
| JP7676041B2 (ja) | ロボット装置 | |
| JP2003074661A (ja) | 二つの回転体を利用した直線駆動装置 | |
| US20110192829A1 (en) | Welding gun | |
| KR101452438B1 (ko) | 로봇 관절 구동장치 | |
| JPH03166083A (ja) | ロボツト用手首装置及び産業用ロボツト | |
| JP5760626B2 (ja) | 真空用2軸ステージ | |
| JPH05296308A (ja) | 直進・回転アクチュエータ | |
| JPH09324843A (ja) | 粗動微動ボールねじおよびそのユニット | |
| JP2007154944A (ja) | アクチュエータ構造 | |
| JP3515953B2 (ja) | アクチュエータ | |
| KR20220119848A (ko) | 탄성 구동장치 | |
| KR100304452B1 (ko) | 정밀 로봇의 직동 및 회전 운동 장치 | |
| CN116164056B (zh) | 一种丝杆组件和多关节机器人 | |
| KR20000061647A (ko) | 정밀 로봇의 직동 및 회전 운동 장치 | |
| US20250083307A1 (en) | Actuator | |
| US20250088086A1 (en) | Actuator | |
| JPH10196756A (ja) | ローラねじを用いた直線作動機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20250107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250408 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250422 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7676041 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |