KR20160052391A - 작업 기계용 하부 주행체 - Google Patents
작업 기계용 하부 주행체 Download PDFInfo
- Publication number
- KR20160052391A KR20160052391A KR1020150151365A KR20150151365A KR20160052391A KR 20160052391 A KR20160052391 A KR 20160052391A KR 1020150151365 A KR1020150151365 A KR 1020150151365A KR 20150151365 A KR20150151365 A KR 20150151365A KR 20160052391 A KR20160052391 A KR 20160052391A
- Authority
- KR
- South Korea
- Prior art keywords
- traveling body
- lower traveling
- body according
- chassis
- linear actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images









Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
- E02F9/085—Ground-engaging fitting for supporting the machines while working, e.g. outriggers, legs
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/02—Travelling-gear, e.g. associated with slewing gears
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K25/00—Auxiliary drives
- B60K25/06—Auxiliary drives from the transmission power take-off
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K8/00—Arrangement or mounting of propulsion units not provided for in one of main groups B60K1/00 - B60K7/00
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D21/00—Understructures, i.e. chassis frame on which a vehicle body may be mounted
- B62D21/18—Understructures, i.e. chassis frame on which a vehicle body may be mounted characterised by the vehicle type and not provided for in groups B62D21/02 - B62D21/17
- B62D21/186—Understructures, i.e. chassis frame on which a vehicle body may be mounted characterised by the vehicle type and not provided for in groups B62D21/02 - B62D21/17 for building site vehicles or multi-purpose tractors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
- E02F3/325—Backhoes of the miniature type
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/96—Dredgers; Soil-shifting machines mechanically-driven with arrangements for alternate or simultaneous use of different digging elements
- E02F3/963—Arrangements on backhoes for alternate use of different tools
- E02F3/964—Arrangements on backhoes for alternate use of different tools of several tools mounted on one machine
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
- E02F9/0808—Improving mounting or assembling, e.g. frame elements, disposition of all the components on the superstructures
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
- E02F9/0808—Improving mounting or assembling, e.g. frame elements, disposition of all the components on the superstructures
- E02F9/0816—Welded frame structure
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
- E02F9/10—Supports for movable superstructures mounted on travelling or walking gears or on other superstructures
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
- E02F9/10—Supports for movable superstructures mounted on travelling or walking gears or on other superstructures
- E02F9/12—Slewing or traversing gears
- E02F9/121—Turntables, i.e. structure rotatable about 360°
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/14—Booms only for booms with cable suspension arrangements; Cable suspensions
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/283—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a single arm pivoted directly on the chassis
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Architecture (AREA)
- Operation Control Of Excavators (AREA)
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
Abstract
본 발명은 작업 기계용 하부 주행체에 관한 것으로서, 하부 주행체는 적어도 3개의 측부 상에서 밀폐된 공간을 한정하기 위하여 시트 금속재로 적어도 형성된다. 하부 주행체는 차축을 위한 장착부와 액추에이터를 위한 장착부를 갖는다. 액추에이터를 위한 장착부는 하부 주행체의 공간 내에 위치하며, 그리고 선형 액추에이터는 하부 주행체에 장착된다.
Description
본 발명은 작업 기계용 하부 주행체, 하부 주행체를 갖는 작업 기계 그리고 작업 기계의 하부 주행체를 조립하는 방법에 관한 것이다.
다양한 종류의 작업 기계가 공지되어 있다. 이러한 기계는 전형적으로 흙-옮김 작업(예를 들어, 땅 팜, 땅 고르기 그리고 흙 적재) 및 자재 취급(예를 들어, 도랑에 골재 퇴적, 자재를 들어올림 및 자재를 높아진 플랫폼으로 위치시킴)을 위하여 이용된다.
기관, 기어박스, 유압 펌프 및 하부 주행체와 같은 어떠한 부품들이 다른 기계 종류에 걸쳐 공유될 수 있을지라도 이러한 기계들은 전형적으로 한 종류의 기계를 위하여 특별하게 설계된 일련의 부분 조립체로부터 제조된다.
공지된 기계의 예는 하기 사항을 포함한다.
선회 굴삭기는 하부 주행체에 대하여 제한된 형태로 회전 가능한 상부 구조를 포함한다. 상부 구조는 위에 열거된 형태의 작업 공정을 수행하기 위하여 버켓과 같은 부속 장치를 조작하기 위한 작업 아암 장치, 디젤 IC 기관과 같은 원동기, 유압 펌프 그리고 운전실을 포함한다. 작업 아암 장치를 작동하기 위해 가압된 유체를 제공하기 위하여 그리고 또한 하부 주행체 내에 위치되고 그리고 2개의 무한 궤도 또는 4개의 휠(또는 이중 휠 구성 내에서는 8개의 휠)을 선택적으로 구동하기 위하여 사용된 하나 이상의 유압 모터에 동력을 공급하기 위하여 원동기는 유압 펌프를 구동한다.
선회 링은 상부 구조와 하부 주행체를 회전 가능하게 연결하며, 그리고 중앙 로터리 조인트 장치는 상부 구조와 하부 주행체의 상대적인 위치와 관계 없이 유압 유체가 상부 구조 내의 펌프에서 유압 모터로 지나는 것을 가능하게 하며 그리고 상부 구조로 복귀하는 것을 가능하게 한다. 만일 선회 굴삭기가 추진을 위하여 트랙을 이용하면, 하부 주행체의 양 측부 상의 트랙을 다르게 구동시킴에 따라 조향은 영향을 받는다. 만일 선회 굴삭기가 추진을 위하여 휠을 이용하면, 2개의 휠 또는 4개의 휠을 위하여 조향 장치가 이용되며, 그리고 이를 위해 하부 주행체에 별도의 유압 제어부가 요구된다.
선회 굴삭기는 넓은 범위의 치수에 사용될 수 있다. 초소형, 소형, 중형 굴삭기는 약 750kg에서 약 12,000kg까지의 중량 범위에 걸쳐 있으며 그리고 전형적으로 작업 아암 장치를 갖는 것으로서 유명하다. 여기서, 작업 아암 장치는 상부 구조에 대한 "킹포스트" 접속부를 이용함에 의하여 상부 구조에 대하여 실질적으로 수직 축을 중심으로 선회할 수 있다. 일반적으로 소형 그리고 중형 굴삭기는 약 1,200kg 이상의 중량을 갖는다. 약 12,000kg를 초과하는 중량을 갖는 대형 굴삭기는 보통 "A-프레임" 굴삭기로 언급되며 그리고 전형적으로 수직축을 중심으로 고정된 작업 아암 장치를 가지며, 그리고 따라서 상부 구조와 함께 선회한다. 이는 보다 작은 굴삭기가 더욱 좁은 공간 내에서 작동하는 것으로 예상되고 그리고 따라서 예를 들어, 벽과 같은 장애물에 가까이에서 도랑을 파기 위하여 2개의 상호 오프셋된 차축을 중심으로 선회할 수 있는 능력이 초소형, 소형 그리고 중형 굴삭기를 위하여 더욱 바람직하다는 사실의 작용이다.
작업 아암 장치는 일반적으로 딥퍼에 선회적으로 연결된 붐을 포함한다. 2개의 선회적으로 연결된 부분을 갖는 3중 관절 붐 그리고 단일의 대체로 만곡진 구조체로 이루어진 단일 붐을 포함하는, 이용할 수 있는 여러 가지 형태의 붐이 있다. 딥퍼는 붐에 선회적으로 연결되며 그리고 부속 장치, 예를 들어 버켓을 위한 장착부가 딥퍼 상에 제공된다. 원하는 작업 동작을 수행하기 위하여 각각에 대하여 붐, 딥퍼 그리고 장착부를 이동시키기 위한 유압 실린더가 제공된다.
낮은 최대 속도 그리고 그들의 금속 트랙이 포장 도로에 야기한 손상으로 인하여 궤도 굴삭기는 상당한 거리 동안에 그들 자신의 추진력 하에서 이동할 수 없다. 그러나, 그들의 트랙은 굴삭기의 안정성을 향상시킨다. 휠이 장착된 굴삭기는 보다 높은 속도(전형적으로 시속 40 킬로미터까지)에서 그리고 눈에 띄게 포장 도로 표면을 손상을 시키지 않고 "도로 주행(roading)"을 할 수 있다. 그러나, 도로 주행 동안에 작업 아암 조립체는 필연적으로 상부 구조의 전방으로 연장되며, 이는 승차감 그리고 전방 시정을 악화시킬 수 있다. 작업 동작을 수행할 때, 공기 타이어는 안정적인 플랫폼을 제공하지 않으며, 따라서 부가적인 스태빌라이저 레그는 안정성을 위하여 전개되도록 요구된다.
원동기, 유압 펌프, 유압 리저버 등이 상부 구조 내에 위치되기 때문에 모든 종류의 선회 굴삭기의 무게 중심은 비교적 높다. 작업 동작 중에 야기된 힘에 대한 카운터발란스로서 작용하기 위하여 이 요소들이 위치될 수 있는 반면에, 패키징 제약은 이러한 위치 선택을 차선책으로 만들 수 있으며 그리고 또한 예를 들어, 기계의 후방에 걸쳐 시선을 제한할 수 있다.
굴삭기는 일반적으로 파기(digging)와 같은 작동을 위하여 사용된다. 그러나, 적재와 같은 작동을 수행하는 것이 바람직하다면, 대안적인 종류의 기계가 이용되어야 한다. 적재 작동을 할 수 있는 기계가 알려져 있으며 그리고 다양한 구성 방식을 갖는다. 일반적으로 "텔레스코픽 핸들러" 또는 "텔레핸들러"로 언급된 한 구성 방식에서, 상부 구조와 하부 주행체는 서로에 대하여 고정되며 그리고 2개 이상의 부분으로 이루어진 망원경식 붐 형태의 중앙 작업 아암은 기계의 앞 뒤로 연장된다. 붐은 수평축을 중심으로 기계의 후단을 향하여 선회하며, 부속 장치는 붐의 선단에 해제 가능하게 장착되어 있고 그리고 제2의 별개의 수평축을 중임으로 선회 가능하다. 공통적으로 사용된 부속 장치는 팰릿 포크(pallet forks) 그리고 셔블(shovels)을 포함한다. 텔레핸들러는 일반적인 적재 작동(예를 들어, 저장 더미에서 건설 현장의 요구되는 위치로의 골재의 운반) 그리고 높아진 플랫폼 상으로의 건축 자재의 들어올림과 같은 들어올림 작동을 위하여 사용될 수 있다.
텔레핸들러는 전형적으로 나아감을 위하여 2개의 차축 상에 4개의 휠을 가지며, 하나 또는 양 차축은 조향 가능하며 그리고 구동된다. 원동기(전형적으로 디젤 IC 기관)가 전륜과 후륜 사이에서 기계의 일측으로 오프셋된 포드 내에 위치될 수 있으며 그리고 정역학적 그리고 기계적 변속기에 의하여 휠에 연결된다. 보통 운전자 운전석은 원동기에 대하여 붐의 다른 측부 상에 위치되며 그리고 휠 사이에서 비교적 낮다. 의도된 적용에 따라, 기계는 전개 가능한 스태빌라이저 레그를 구비할 수 있다.
들어올림 작동을 선회 작동과 조합하기 위하여 부가적인 하중과 더 큰 높이를 희생하면서 텔레핸들러의 일부는 운전실과 붐을 회전 가능한 상부 구조에 장착한다. 이들 기계가 적재 대신에 들어올림을 위하여 원칙적으로 사용됨에 따라, 더 긴 붐을 수용하기 위하여 기계는 일반적인 텔레핸들러보다 더 긴 축간 거리를 가지며, 이는 조종 성능에 영향을 준다. 또한, 들어올림을 위하여 기계에 근접한 지면을 향한 시선은 굴삭을 위한 것보다는 덜 중요하기 때문에 이 시선은 결과적으로 상당히 좋지 않다.
일부 들어올림 작동, 특히 무거운 화물의 들어올림 작동을 위하여, 텔레핸들러보다는 크레인을 사용하는 것이 더 적절하다. 이동식 크레인은 일반적으로 휠 또는 궤도가 장착된 베이스 상에 제공된다. 붐, 보통 망원경식 붐은 베이스에 선회적으로 장착된다. 호이스트, 와이어 로프 또는 체인 그리고 결속 섬유는 붐에 연결되며 그리고 한 위치에서 다른 위치로 자재를 이동시키기 위하여 사용된다. 크레인을 위한 안전 규정은 보통 텔레핸들러를 위한 안전 규정보다 엄격하다.
대안적인 작업 작동에서, 이동식 고소 작업 플랫폼(mobile elevated work platform; MPWP)이 사용될 수 있는 경우에 작업자는 높아진 작업 영역으로 접근할 필요가 있을 수 있다. MPWP는 일반적으로 휠이 달린 베이스 및 이에 연결된 작업 아암을 갖는다. 작업 아암은 작업자를 위한 플랫폼을 갖는다. 예를 들어, 작업 아암은 시저 리프트(scissor lift) 또는 신장 가능한 또는 관절형 붐일 수 있다. MPWP의 사용은 높아진 높이에서의 작업을 수반하기 때문에 이전에 설명된 작업 기계의 요구 조건과 비교하여 MPEP에 부과된 다른 기술적 그리고 안전성 요건이 있다.
또 다른 대안적인 작업 기계가 (또한 덤퍼 트럭으로서 알려진) 덤프 트럭이다. 덤프 트럭은 한 장소에서 다른 장소로 자재(예를 들어 굴삭기 버킷으로부터의 다수의 적재물)를 운송하기 위하여 자주 이용된다. 덤프 트럭은 덤프 몸체 또는 덤프 몸체의 내용물이 하역되는 것을 가능하도록 선회 가능한 박스 베드를 갖는다. 일반적으로 하나 이상의 유압 실린더에 의하여, 그리고 일부 경우에서 실린더와 레버 장치에 의하여 작동되는 팁핑 메커니즘(tipping mechanism)이 덤프 몸체를 기울이기 위하여 사용된다.
다른 작업 적용을 위한 위의 기계와 같은 다른 기계를 개발하는 비용은 의미가 있다. 또한, 한 종류의 기계에서 다른 종류의 기계로의 생산 라인을 전환하는 비용 및 지체 시간 또한 의미가 있다.
또한, 이 기계를 위한 대형 조립체는 단일 위치에서 제조될 수 있으며 그리고 조립을 위하여 제 2 위치로 먼 거리를 수송될 수도 있다. 조립체의 큰 규모 그리고 그 형상으로 인하여 운송 비용은 높아질 수 있고, 운송을 위한 그의 포장을 비효율적으로 만든다.
본 발명은 선행 기술의 문제점을 극복 또는 적어도 경감하는 것을 모색한다.
본 발명의 제 1 양태는 작업 기계용 하부 주행체를 제공하며, 이 하부 주행체는 적어도 3개의 측부 상에서 밀폐된 공간을 한정하기 위하여 시트 금속 재료로부터 적어도 부분적으로 형성되며, 하부 주행체는 선행 액추에이터, 차축을 위한 장착부 그리고 선형 액추에이터의 제 1 종단을 위한 장착부를 포함한다. 여기서, 선형 액추에이터의 제 1 종단을 위한 장착부는 공간 내에 위치되어 선형 액추에이터가 적어도 부분적으로 공간 내에 수용된다.
유리하게는 이 배치는 작업 기계의 하부 주행체의 보다 우수한 포장을 가능하게 한다. 이 장치는 또한 유압 실린더에 손상으로부터의 보호를 제공한다.
한 실시예에서, 하부 주행체는 밀폐된 측부 중 적어도 하나 내의 개구를 더 포함한다.
한 실시예에서, 선형 액추에이터는 하부 주행체의 밀폐된 측부 내의 개구를 통하여 연장하도록 구성된다.
한 실시예에서, 선형 액추에이터는 공간 내에 실질적으로 수평적으로 장착된다.
한 실시예에서, 하부 주행체는 선형 액추에이터의 제 2 종단에 부착된, 작업 기구로의 연결을 위한 연결 장치를 더 포함한다.
한 실시예에서, 작업 기구는 스태빌라이저 레그 장치이다.
한 실시예에서, 작업 기구는 도저 블레이드 장치이다.
한 실시예에서, 작업 기구는 3-점 연결 장치이다.
한 실시예에서, 연결 장치는 액추에이터의 실질적인 수평 운동을 작업 기구의 실질적인 수직 아치형 움직임으로 변환시키도록 구성된다.
한 실시예에서, 하부 주행체는 선단, 후단 그리고 선단과 후단 사이에서 연장된 적어도 하나의 측표면을 포함한다.
한 실시예에서, 측부 포드는 하부 주행체에 장착되며 그리고 원동기를 포함한 구동 장치를 포함한다.
한 실시예에서, 하부 주행체는 구동 장치를 제어하기 위한 전자 제어 유니트(ECU)를 더 포함한다.
한 실시예에서, 하부 주행체는 상부에 상부 구조를 장착하기 위한 장착 장치를 더 포함한다.
한 실시예에서, 장착 장치는 선회 링을 포함한다.
한 실시예에서, 하부 주행체는 메인 섀시와 적어도 하나의 보조 섀시를 포함하며, 여기서 하부 주행체를 형성하기 위하여 보조 섀시는 메인 섀시에 고정된다.
다양한 작업 기계에 걸쳐 실질적으로 동일할 수 있는 메인 섀시를 제공하는 것은 부품의 개수를 줄일 수 있고 그리고 단일 생산 라인이 다수의 기계를 제조하는 것을 허용하며, 그로 인하여 비용이 줄어든다. 다수의 조립체로 나누어진다면 보다 많은 섀시를 수송을 위해 주어진 체적으로 포장하는 것이 가능할 수 있음에 따라 다른 위치에서 제조 및 조립된다면 메인 섀시 그리고 보조 섀시의 운반을 더 효율적으로 함에 의하여 모듈식 장치는 또한 비용을 절감할 수 있다.
한 실시예에서, 선형 액추에이터는 보조 섀시 내에 장착된다.
보조 섀시에 작업 기구를 장착하기 위하여 보조 섀시에 선형 액추에이터를 제공하는 것은 유리하게는 다른 적용을 위한 하부 주행체의 주문 제작을 가능하게 하며 그리고 보조 섀시에 나중에 장착된 작업 기구를 갖는 단일 보조 섀시가 제조되는 것을 허용한다.
한 실시예에서, 선행 액추에이터는 유압 액추에이터이다.
바람직하게는, 적어도 3개의 측부 중 하나는 실질적으로 공간 위에, 즉 조립된 작업 기계 내의 상부 구조체와 실질적으로 마주보는 하부 주행체의 측부 상에 위치된다. 유리하게는, 이 배치는 액추에이터를 위로부터의 손상으로부터 보호한다.
본 발명의 제 2 양태는 작업 작동을 수행할 수 있도록 구성된 작업 아암을 포함하는 상부 구조 및 제 1 양태에 따른 하부 주행체를 포함하는 작업 기계를 제공하며, 여기서 상부 구조는 하부 주행체에 장착된다.
이제 본 발명의 실시예가 첨부된 도면을 참고하세 설명될 것이다.
도 1은 작업 기계의 측면도.
도 2는 도 1의 작업 기계의 평면도.
도 3은 도 1의 작업 기계의 유압 및 전자 제어 시스템의 개략적인 도면.
도 4는 본 발명의 실시예에 따른 작업 기계의 측면도.
도 5는 본 발명의 실시예에 따른 작업 기계의 측면도.
도 6은 본 발명의 실시예에 따른 메인 섀시의 사시도.
도 7은 본 발명의 실시예에 따른 보조 섀시의 사시도.
도 8은 본 발명의 실시예에 따른 보조 섀시의 사시도.
도 9는 본 발명의 실시예에 따른 작업 기계의 측면도.
도 10은 본 발명의 실시예에 따른 작업 기계의 측면도.
도 11은 본 발명의 실시예에 따른 작업 기계의 부분 절단 사시도.
도 12는 본 발명의 실시예에 따른 작업 기계의 부분 절단 사시도.
도 2는 도 1의 작업 기계의 평면도.
도 3은 도 1의 작업 기계의 유압 및 전자 제어 시스템의 개략적인 도면.
도 4는 본 발명의 실시예에 따른 작업 기계의 측면도.
도 5는 본 발명의 실시예에 따른 작업 기계의 측면도.
도 6은 본 발명의 실시예에 따른 메인 섀시의 사시도.
도 7은 본 발명의 실시예에 따른 보조 섀시의 사시도.
도 8은 본 발명의 실시예에 따른 보조 섀시의 사시도.
도 9는 본 발명의 실시예에 따른 작업 기계의 측면도.
도 10은 본 발명의 실시예에 따른 작업 기계의 측면도.
도 11은 본 발명의 실시예에 따른 작업 기계의 부분 절단 사시도.
도 12는 본 발명의 실시예에 따른 작업 기계의 부분 절단 사시도.
전체적인 구성 방식
도 1 내지 도 3을 참고하면, 작업 기계(10)가 다소 간략화된 형태로 도시된다. 작업 기계는 (약 6 내지 12미터 톤의 운용 중량) 중형 굴삭기인 것으로 간주될 수 있다. 다른 실시예에서, 작업 기계는 (1.2 내지 6 미터 톤의 운용 중량) 소형 굴삭기일 수 있다. 기계는 베이스 조립체를 포함하며, 이 베이스 조립체는 하부 주행체(12; undercarriage)를 포함한다. 상부 구조(14)는 선회 링(16; slewing ring) 형태의 선회 메커니즘에 의하여 베이스 조립체의 하부 주행체에 연결된다. 선회 링(16)은 이 실시예에서 하부 주행체(12)에 대한 상부 구조의 제한되지 않는 회전을 허용한다. 작업자가 작업 기계를 작동시킬 수 있는 운전실(30)이 상부 구조에 호전 가능하게 장착된다. 작업 아암 장치(40)가 상부 구조에 회전 가능하게 장착되며 그리고 굴착 작동을 수행하기 위하여 제공된다.
하부 주행체
하부 주행체는 한 쌍의 이격된 샤시 레일(18a 및 18b)로 형성되며, 이 샤시 레일은 앞뒤로(fore-aft) 연장되고 그리고 전형적으로 그러나 항상 평행하지는 않거나 또는 실질적으로 평행하다. 레일은 하부 주행체(12)의 대부분의 강도를 제공한다. 하부 주행체는 지면 결합 구조체에 연결되며, 이 실시예에서 하부 주행체는 샤시 레일(18a 및 18b)에 장착된 제 1 및 제 2 구동 차축(20a 및 20b) 그리고 각 차축 종단에 회전 가능하게 부착된 휠을 포함한다. 이 실시예에서, 제 2 구동 차축(20b)은 샤시 레일(18a 및 18b)에 대하여 고정되나, 반면에 제 1 구동 차축(20a)은 제한된 관절 운동을 할 수 있으며, 그로 인하여 지면이 균일하지 않을지라도 휠이 지면에 접촉한 상태를 유지하는 것을 허용한다. 휠(19a, 19b, 19c, 19d)은 전형적으로 오프-로드(off-road) 공압 타이어를 구비한다. 양 차축(20a, 20b) 에 연결된 휠(19a, 19b, 19c, 19d)은 조향 허브(17a, 17b, 17c, 17d)를 통하여 조향 가능하다. 이 실시예에서, 축거는 2.65m이며, 전형적으로 2.0m 내지 3.5m 범위이다.
본 출원의 목적을 위하여, 앞-뒤 방향(A)은 섀시 레일(18a 및 18b)의 일반적이 방향과 실질적으로 평행한 방향으로 정의된다. 일반적인 상하 방향(U)은 작업 기계가 평지에 있을 때 실질적으로 수직인 방향으로 정의된다. 일반적인 횡방향은 작업 기계가 평지에 있을 때 실질적으로 수평이고 그리고 앞-뒤 방향(A)에 실질적으로 직교하는 방향으로 정의된다.
이 실시예에서, 도저 블레이드 장치(22)는 섀시 레일(18a 및 18b)의 한 종단에 선회적으로 고정된다. 이 도저 블레이드 장치는 공지된 장치를 이용한 유압 실린더(21)에 의하여 들어올려질 수도 그리고 낮아질 수 있으며, 그리고 또한 굴삭시 지면으로부터 인접하는 휠을 들어올림에 의하여 기계를 위한 스태빌라이저(stabiliser)의 역할을 수행할 수 있다. 그러나, 이는 다른 실시예에 제공될 수 없다.
스태빌라이저 레그 장치(24)는 섀시 레일(18a 및 18b)의 반대 종단에 선회적으로 장착되며, 또한 공지 장치를 이용한 유압 실린더(23)에 의하여 들어올려질 수도 그리고 낮아질 수 있다. 그러나, 다른 실시예에서 이는 제거될 수 있다.
구동
이 실시예에서, 원동기를 포함하는 구동 장치와 변속기가 하부 주행체(12)에 수용되며, 여기서 원동기는 디젤 IC 기관(64)이다.
열 교환기(66) 그리고 냉각 팬(68)은 엔진(64)에 인접한 하부 주행체 내에 수용된다. 다른 실시예에서 냉각 팬이 다르게 향할 수 있을지라도 팬의 회전 축(Q)이 앞-뒤 방향(A)으로 연장되도록 냉각 팬(68)이 향한다.
연료 탱크(70)는 기관(64)에 연료 공급을 제공한다. 유압 탱크(72)는 연료 탱크(70)에 인접하게 제공된다.
기관(64), 열 교환기(66), 냉각 팬(68), 연료 탱크(70) 그리고 유압 탱크(72)가 모두 차축들(20a 그리고 20b) 사이의 영역 내에 수용된다. 도 1에서 보여질 수 있는 바와 같이, 기관(64)은 상부 구조(14)의 하부 범위와 일치하는 높이 아래에 위치된다. 실제로, 대부분의 기관(64) 그리고 본 실시예에서 전체 기관(64)은 휠(19a, 19b, 19c, 19d)의 상부 범위에 일치하는 높이(Q) 아래에 위치된다. 본 실시예에서 대부분의 열 교환기(66), 냉각 팬(68), 연료 탱크(70) 그리고 유압 탱크(72)는 휠(19a, 19b, 19c, 19d)의 상부 범위에 일치하는 높이(Q) 아래에 위치된다.
도 3을 참고하면, 본 실시예에서 변속기는 정압 변속기이다. 변속기는 고압 스워시 플레이트형(swash plate type) 정압 변속기 펌프(75b) 그리고 관련된 챠지 펌프(75a)를 포함한다. 결과적으로 변속기 펌프는 2개의 유압 모터(76 및 77)를 선택적으로 구동할 수 있다. 변속기 펌프(75b)는 약 350 내지 450 바(35 내지 45 MPa)의 전형적인 작동 압력을 갖는다.
엔진(64)은 챠지 펌프(75a)와 변속기 펌프(76b)를 구동하도록 구성된다. 펌프(75a 및 76b)는 필요에 따라 유압 유체 탱크(72)로부터 유압 유체를 뽑아 내고 그리고 전용 공급부를 통하여 유압 모터(76 및 77)로 공급하며 그리고 호스로 돌아가도록 (즉, 흐름은 기본적으로 폐루프이나, 필요에 따라 유압 유체는 탱크(72)로부터 뽑아 내어지고 그리고 돌아간다) 구성된다. 본 실시예에서, 유압 모터(76)는 도저 블레이드 장치(22)를 향하여 위치된다. 기관(64), 유압 펌프(74) 그리고 유압 모터(77)는 스태빌라이저 장치(24)를 향하여 위치된다.
제 1 유압 모터(76)는 예를 들어 0 내지 255 cm3/회전의 큰 배기량 범위를 갖는 고속 스와시 플레이트형 모터이며 그리고 앞 차축(20a)을 정상적인 주행 방향으로 구동한다. 모터의 출력부는 전방을 향하며 그리고 짧은 구동 샤프트(78)와 차동 장치(도시되지 않음)를 통하여 제 1 차축(20a)을 구동한다. 제 2 유압 모터(77)는 예를 들어 0 내지 125 cm3/회전의 보다 작은 배기량 범위를 갖는 비교적 저속 스와시 플레이트형 모터이다. 저속 모터(77)는 제 2 차동 장치(도시되지 않음)를 통하여 제 2 구동 샤프트(80)에 연결되어 제 2 (뒤) 차축(20b)을 구동한다.
다른 실시예에서, 단일 유압 모터가 앞 차축과 뒤 차축에 구동을 제공할 수 있으며, 전형적으로 2륜 구동/4륜 구동 셀렉터는 클러치를 작동시켜 하나의 차축에 구동부를 분리/결합한다.
챠지 펌프(75a) 그리고 변속기 펌프(75b)는 기관(64)에 인접하게 위치되며 그리고 기관에서 펌프로의 입력부가 기관에서 펌프로의 출력부와 축 방향으로 나란하도록 향한다.
상부 구조 내에 수용될 부품들의 체적 감소를 발생시키기 위하여 위에서 설명된 바와 같이 하부 주행체 내에 구동 장치를 배치하는 것이 알려졌으며, 결과적으로 기계의 좌측부에서 운전자 시트에 앉을 때 185cm의 키를 갖는 운전자(백분위수 95%의 남성)를 위하여 (이러한 치수의 일반적인 중형 굴삭기에서의 약 22°와 비교하여) 우측 후방 코너에 걸쳐 수평선 아래에 30°를 초과(본 실시예에서는 33°)하는 시선을 야기한다. 이는 상부 구조의 부분에 의하여 가려진, 기계 주변의 지반 영역의 현저한 감소를 야기하며, 그로 인하여 기계 조종을 위한 시계를 개선한다.
구동 장치가 대체로 상부 구조 내에 위치된 일반적인 굴삭기와 비교하여, 하부 주행체 내에 구동 장치를 위치시키는 다른 이점은 기관과 운전실 사이에서의 소음, 진동 및 하쉬니스(NVH) 절연이 개선되어 운전자를 위한 안락함과 안전을 개선한다는 것이다. 또한, 유지 그리고 연료 재급유를 위한 기관, 연료 탱크, 유체 탱크 등으로의 접근이 지면에서 이루어진다.
상부 구조
상부 구조(14)는 선회 링(26) 상에 장착된 구조적 플랫폼(26)을 포함한다. 도면에서 보여질 수 있는 바와 같이, 하부 주행체에 상부 구조(14)를 중심적으로 장착하기 위하여 선회 링(16)은 앞-뒤 방향(A) 그리고 횡방향(L)으로 하부 주행체(12)에 실질적으로 중심이 된다. 선회 링(16)은 대체적인 상하 축(Z)을 중심으로 하는 하부 주행체에 대한 상부 구조(14)의 회전을 가능하게 한다.
로터리 조인트 장치(85)는 선회 링(16)에 중심적으로 제공되며 그리고 다수의 유압 유체 라인, 복귀 유압 유체 라인 그리고 전기 -컨트롤러 영역 네트워크(CAN)- 신호 라인을 하부 주행체로부터 상부 구조로 제공하도록 구성되며, 반면에 하부 주행체에 대하여 상부 구조의 360° 회전을 가능하게 한다. 이러한 로터리 조인트 장치는 본 기술 분야에서 알려져 있다.
운전실(30)은 플랫폼(26)에 장착된다. 운전실은 운전자 시트 및 (이하에 설명된) 기계 제어부를 수용한다.
제 1 유압 모터(32)와 브레이크를 이용하여 상부 구조(14)는 하부 주행체(12)에 대하여 회전된다.
작업 아암 장치(40)를 위하여 킹포스트(28; kingpost)가 플랫폼에 더 장착된다. 킹포스트(28) 장치는 본 기술 분야에서 공지되어 있으며 그리고 일반적인 상하 축(X)을 중심으로 하는 그리고 일반적인 횡축(W)을 중심으로 하는 작업 아암의 회전을 가능하게 한다.
상부 구조는 킹포스트(28)에 대하여 상부 구조의 반대측 상에 위치된, 작업 아암 장치를 위한 카운터웨이트(34)를 더 포함한다.
유압 공급부
기관(64)은 차지 펌프(75a) 그리고 변속기 펌프(75b)와 직렬로 배치된 메인 저압 유압 펌프(74)를 부가적으로 구동한다. 이 실시예에서, 메인 유압 펌프는 약 250 내지 300 바(25 내지 30MPa)의 작동 압력을 가지며 그리고 또한 가변적인 배기량 형태이다.
메인 펌프(74)는 유압 유체를 작업 아암 장치를 작동시키기 위하여 상부 구조(14) 내의 관련된 (접미사 "a"를 갖는 동일한 도면 부호로 지시된) 밸브를 통하여 유압 실린더(50, 52, 54, 60, 62)에, 파일럿 공급 밸브(83)를 통하여 선회 브레이크에, 그리고 그랩(grabs) 등(도시되지 않음)과 같은 어떠한 부속 장치에 의한 사용을 위하여 보조 유압 유체 공급부에 공급한다. 메인 펌프(74)는 부가적으로 하부 주행체 내의 스태빌라이저/도저 밸브(79)를 통하여 도저 블레이드와 스태빌라이저 장치의 유압 실린더(21, 23)에 유압 유체를 공급한다. 그러나 대안적인 실시예에서, 모터와 유압 실린더에 유압 유체를 공급하기 위하여 단일 펌프가 이용될 수 있다. 도 3에 도시된 바와 같이, 에어컨(93)에 유압 액체를 공급하기 위하여 메인 펌프(74)가 더 이용된다.
이 실시예에서, 기관은 조향 시스템을 위하여 개별 펌프(74')를, 냉각 팬(69b)을 구동하기 위하여 팬 펌프(69a)를, 그리고 주차 브레이크(31b)를 위하여 주차 브레이크 밸브(31a)를 부가적으로 구동한다. 이 실시예에서, 이 펌프들은 약 200 바(20MPs)의 저압에서 그리고 ECU 제어 없이도 작동 가능한 기어 펌프이다.
더욱이, 챠지 펌프(75a)는 앞 차축(20a)의 관절 운동을 선택적으로 방지하는 차축 록 밸브(33a)에 유압 유체를 부가적으로 공급한다.
작업 아암
본 실시예의 작업 아암 장치(40)는 굴삭기 아암 장치이다. 작업 아암 장치는 딥퍼(44; dipper)에 선회적으로 연결된 3중 관절 붐(42)을 포함한다. 3중 관절 붐(42)은 제 2 부분(48)에 선회적으로 연결된 제 1 부분(46)을 포함한다. 대체적으로 가로축(W)을 중심으로 킹포스트(28)에 대하여 붐(42)의 제 1 부분(46)을 들어올리고 그리고 낮추기 위하여 유압 실린더(50)가 제공된다. 대체적으로 가로축(T)을 중심으로 붐의 제 1 부분에 대하여 붐(42)의 제 2 부분(48)을 선회시키기 위하여 다른 유압 실린더(52)가 제공된다. 대체적으로 가로축(S)을 중심으로 붐(42)에 대하여 붐(42)의 딥퍼(44)를 회전시키기 위하여 또 다른 유압 실린더(54)가 제공된다. 딥퍼(44)에 부속 장치를 선회적으로 장착하기 위하여 장착부(56)가 제공되며, 여기서 본 실시예에서 부속 장치는 버킷(58)이다. 딥퍼(44)에 대하여 부착물을 회전시키기 위하여 유압 실린더(60)가 제공된다. 그러나 대안적으로, 다른 실시예에서 붐 실린더 장치(예를 들어, 트윈(twin) 실린더)가 이용될 수 있다.
일반적으로 상하 축(X)을 중심으로 작업 아암 장치(40)를 회전 (스윙/선회)시키기 위하여 도 2에서 가장 명확하게 도시된 또 다른 유압 실린더(62)가 제공된다. 작업 아암 장치를 회전시키기 유압 실린더 장치를 이용하는 것은 작업 아암(10)의 제조 및 작동을 단순화시킨다.
기계 제어부
다수의 기계 제어 입력부가 운전실(30) 내에 제공된다. 이 실시예에서, (조향 및 제동을 제외하고) 입력은 CAN 버스를 통하여 적절한 마이크로프로세서, 메모리 등을 포함하는 하나 이상의 상부 구조 전자 제어 유니트(ECU; 86)로 전송되어 작업 아암 등의 이동을 제어하기 위하여 다양한 밸브로 신호를 보내기 위해 입력을 해석하며, 그리고/또는 이 입력은 하나 이상의 다른 하부 주행체 ECU(87)로 전송되어 스태빌라이저/도저 밸브(79), 팬 모터(69b), 주차 브레이크 밸브(31a), 차축 록 밸브(33a), 메인 펌프(74), 변속기 펌프(75b), 조향 모드 밸브(97)를 포함하는 하부 주행체 내에서의 유압 기능을 궁극적으로 제어한다.
대안적인 실시예에서, ECU는 (예를 들어, 하부 주행체 내에 수용된) 베이스 조립체 내에 제공될 수 있으며, 그리고 기계 입력 제어부로부터의 신호는 상부 구조 내의 ECU(86)를 통하는 대신에 하부 주행체 내의 ECU(들)(87)로 직접적으로 보내질 수 있다. 이러한 장치를 위한 전기적 연결은 선회 링 그리고 로터리 조인트 장치를 통하여 제어 입력부에서 ECU(87)로 보내질 수 있다.
제어 입력부는: 작업 아암(40)의 작동을 제어하기 위한 조이스틱(88), 다양한 이차 기능을 위한 스위치(89), 작업 작동을 위하여 기관 속도를 설정하기 위한 핸드 스로틀(90; hand throttle), 도로 주행/조종을 위하여 기관 속도를 역학적으로 설정하기 위한 풋 스로틀(foot throttle 91) 그리고 원하는 방향으로 구동부를 연결하기 위한 정/중립/역 (FNR) 셀렉터(92)를 포함한다.
조향 및 제동의 안전-필수 본질로 인하여, 제동 및 조향은 브레이크 페달(94) 및 핸들(도시되지 않음)에 연결된 조향 밸브(95)에 의하여 유압적으로 제어된다. 요구에 따라, 유압 유체의 적절한 공급이 브레이크 페달(94)/조향 밸브(95)로 제공되는 것을 보장하는 로터리 조인트(85) 및 조향 우선 밸브(96)를 통하여 전용 조향 펌프(74')로부터 유압 유체가 공급된다.
조향 밸브(95)는 그후 로터리 조인트를 통한 다른 공급부를 통하여 유압 유체를 하부 주행체(12) 내의 조향 모드 밸브(97)로 공급하며, 여기서 조향 모드 밸브는 기계가 4륜 조향(비포장 도로), 2륜 조향(포장 도로) 또는 크랩 조향 상태에서 작동하는지 여부를 제어한다. 조향 모드 밸브는 그후 선택된 모드에 따라 유압 유체를 적절한 조향 실린더(98)로 공급한다.
브레이크 페달(94)은 유체를 또한 로터리 조인트를 통한 공급부를 통하여 휠 종단에서 상용 브레이크(99)에 공급한다. 팬 펌프(69a)로부터 공급된 개별 유압 유체는 상부 구조 ECU(들)(86) 및 하부 주행체 ECU(들)(87)의 제어 하에서 주차 브레이크 밸브(31a)뿐만 아니라 팬 모터(69a)와 차축 록 밸브(33a)로 공급된다.
다른 실시예에서, 적절한 수준의 고장 허용 한계(fault tolerance)가 시스템 내로 구축된다면 제동 및 조향은 전자 제어를 통하여 영향을 받을 수 있다.
도로에서의 고속 작동
도로 상에서 작동("도로 주행")할 때 또는 예를 들어 수평/단단한 표면 상에서 조종할 때, 기계(10)의 이동 속도는 견인 또는 토크보다 선호된다. 따라서 제 1의 이륜 작동 모드에서, 차량 운전자는 2WD/4WD 셀렉터(도시되지 않음) 상의 2WD를 선택하여 적절한 상부 구조 ECU(86)로 신호를 보내며, 이 ECU는 결과적으로 하부 주행체 ECU(87)를 통하여 변속기 펌프(75b)로 신호를 보내 고속 모터(76)로의 유압 유체의 흐름을 가능하게 한다.
그후, 운전자는 FNR 셀렉터(92)로부터 전진 또는 후진을 선택하며, 그를 위한 신호는 유사한 방식으로 변속기 펌프(75B)로 피드스루되어 변속기 펌프를 통한 유압 유체가 정확한 흐름 방향으로 향하게 하여 고속 모터(76) 및 그에 따라 휠(19a 및 19)을 원하는 반향으로 회전시킨다.
그후 운전자는 풋 스로틀(91)을 이용하여 기관 속도를 설정하며, 이는 결과적으로 원하는 속도에서 변속기 펌프(75b)를 구동한다. 하부 주행체 ECU(87)는 펌프(75b)의 스와시 각도(swash angle) 그리고 고속 모터(76)를 제어하여 고속 모터(76)의 회전 그리고 제 1 차축(20a) 상에서의 휠(19c, 19d)의 종동 회전을 야기한다.
전형적으로 이는 약 시속 40킬로미터의 최대 속도로 주행을 가능하게 한다.
저속 작동
전형적으로 건설 현장과 같은 비포장 장소에서의 저속, 보다 큰 토크, 보다 높은 견인 조종을 위하여, 운전자는 2WD/4WD 셀렉터로부터 제 2의 4륜 구동 작동 모드를 선택한다. 이는 결과적으로 상부 구조 ECU(86)로 신호를 보내며, 이 ECU는 결과적으로 하부 주행체 ECU(87)를 통하여 변속기 펌프(75b)로 신호를 보내 고속 모터(76)와 저속 모터(77)로의 유압 유체의 흐름을 허용한다.
그후 운전자는 FNR 셀렉터(92)로부터 전진 또는 후진을 선택하며, 그를 위한 신호는 유사한 방식으로 변속기 펌프(75B)로 피드스루되어 고속 모터(76)와 저속 모터(77) 내로의 유압 유체의 흐름 방향을 결정한다.
운전자는 그후 풋 스로틀(91)을 이용하여 기관 속도를 설정하며, 결과적으로 풋 스로틀은 원하는 속도에서 변속기 펌프(75b)를 구동한다. 하부 주행체 ECU(87)는 바람직하게는 펌프(75b)의 스와시 각도(swash angle)와 고속 모터(76)를 제어하여, 궁극적으로 고속 모터(76)와 저속 모터(77)의 회전 그리고 호환될 수 있는 속도에서 제 1 및 제 2 차축(20a, 20b) 상의 휠(19a, 19b, 19c, 19d)에 대한 구동을 야기한다.
전형적으로, 이 작동 모드는 비포장 도로 작동를 위한, 예를 들어 시속 10킬로미터 이하의 더 낮은 최고 속도를 제공한다.
모듈식 하부 주행체 조립체
도 4 및 도 5를 참고하면, 본 발명의 실시예에 따른 작업 기계(510)가 다소 간략화된 형태로 도시된다. 본 발명의 구동 장치는 위에서 설명한 것과 실질적으로 동일한 것으로 간주될 수 있으며, 구동 장치는 하부 주행체 조립체(512) 내에 수용된다.
선회 링(516)을 통하여 하부 주행체 조립체 상에 상부 구조(514)를 장착하기 위하여 하부 주행체 조립체(512)는 장착 장치(532)를 갖는 메인 섀시(526)를 포함하여 하부 주행체에 관하여 상부 구조의 회전을 가능하게 한다. 다른 실시예에서, 상부 구조의 방향이 하부 주행체(512)에 관하여 고정되도록 장착 장치(532)는 구성될 수 있다. 메인 섀시(526)는 선단과 후단, 그리고 선단과 후단 사이를 연장하는 2개의 측부 플레이트(537)를 포함하며, 여기서 측부 플레이트는 섀시 레일의 부품으로서의 역할을 한다. 선단과 후단 각각은 선단과 후단 상에 보조 섀시(528)를 장착하기 위한 장착 접속부(534)를 갖는다. 장착 접속부(534)는 전면 및 후면의 각 코너에서의 플랜지 상에 (보이지 않는) 3개의 바를 포함하여 볼트(535) 또는 다른 적절한 패스너로 보조 섀시(528)를 메인 섀시(526)에 고정시킨다. 메인 섀시(526)의 측부 플레이트(537)는 (보이지 않는) 적절한 컷 아웃(cut-out)을 갖는 금속 시트로 구성되어 구동 샤프트, 호스 등이 통과하는 것을 허용한다. 다른 실시예에서, 장착 접속부(534)는 메인 섀시(526)에 보조 섀시(528)를 용접하기 적합한 표면을 포함할 수 있다 (아래의 도 6 내지 도 8 참조).
보조 섀시(528)는 선단과 후단 그리고 선단과 후단 사이에서 길이 방향으로 연장하는 2개의 측부 플레이트(518?)를 가지며, 여기서 장착 접속부(534)는 보조 섀시(528)의 선단 또는 후단에 위치한다. 각 보조 섀시(528)의 장착 접속 부는(536) 메인 섀시(526)의 보어(534)에 상보적인 3개의 보어를 갖는 플랜지 형태이다. 다른 실시예에서, 보어의 개수는 필요에 따라 달라질 수 있으며, 그리고 또한 메인 섀시 그리고 보조 섀시의 상단 에지 및/또는 바닥 에지 상에서 가로질러 연장하는 플랜지 상에 제공된다.
보조 섀시(528)는 장착 접속부(534)에 대해 보조 섀시(528)의 반대 종단에 선회적으로 장착된 스태빌라이저 레그 장치(524) 또는 도저 블레이드 장치(522)를 갖는다. 스태빌라이저 레그 장치(524) 또는 도저 블레이드 장치(522)를 공지된 장치를 각각 이용한 유압 실린더(523, 521)에 의하여 들어올려지거나 또는 낮아질 수 있다. 도저 블레이드 장치(522)는 또한 굴삭시 지면으로부터 인접하는 휠을 들어올림에 의하여 기계를 위한 스태빌라이저의 역할을 수행할 수 있다.
각 보조 섀시(528)는 지면 결합 구조에 연결되며, 이 실시예에서, 지면 결합 구조는 보조 섀시에 장착된 구동 차축(520a 및 520b) 중 하나 및 각 차축 종단에 회전 가능하게 부착된 휠을 포함한다. 작업 기계(510)의 기능에 맞도록 보조 섀시(528)의 선단과 후단 사이의 길이는 선택될 수 있다. 도 4는 보다 짧은 선회 반경을 필요로 하는 그리고 한정된 공간에서 작업하는 것을 필요로 하는 굴삭기와 같은 작업 기계에 적합한, 상대적으로 짧은 길이 및 짧은 축간 거리를 갖는 작업 기계(510)를 야기하는 2개의 짧은 보조 섀시(528)를 도시한다. 반대로, 도 5는 더 안정적인 하부 주행체를 필요로 하는, 크레인 또는 회전 텔레핸들러와 같은 작업 기계에 보다 적합할 수 있는 긴 축간 거리를 야기하는 2개의 긴 보조 섀시(528')를 갖는 작업 기계(510)를 도시한다. 다른 실시예에서, 긴 보조 섀시와 짭은 보조 섀시의 조합이 이용될 수 있다.
도 6, 도 7 및 도 8을 참고하면, 대안적인 메인 섀시(626) 그리고 보조 섀시(728)가 도시된다. 메인 섀시(626) 는 2개의 금속성 측부 플레이트(637, 638) 그리고 상단 에지에서 측부 플레이트에 용접된 상단 플레이트(660)로 구성된다. 상단 플레이트(660)는 상단 플레이트의 중앙에 실질적으로 위치된 선회 링 형태의 장착 장치를 포함한다. 메인 섀시(626)는 상부 코너 주변에서 절곡되고 그리고 측부 플레이트(637, 638)에 용접된 2개의 종단 플레이트(662)를 더 포함한다. 변속기 구성 요소를 위한 대체적으로 사각 공간을 한정하기 위하여 종단 플레이트(662)는 연장되어 상단 플레이트(660)의 에지와 만난다.
메인 섀시(626)는 종단 플레이트(662)에 의하여 한정된 2개의 장착 접속부(634)를 포함한다. 이 실시예에서, 도 6 및 도 7에 도시된 바와 같이 메인 섀시(626)의 장착 표면에 맞추도록 보조 섀시(728)가 제공될 수 있게 하기 위하여 그리고 그후 그에 용접될 수 있게 하기 위하여 장착 접속부(634)는 구성된다.
메인 섀시(626)는 기관(도시되지 않음)으로부터의 출력부가 메인 섀시를 통과할 수 있도록 구성된, 측부 표면(637) 중 하나에 도면 부호 642에서 지시된 요부를 갖는다. 기관이 수용된 측부 포드의 보조 요소 또는 구조적 요소의 메인 섀시로의 장착을 위하여 또는 배관 및 케이블이 통과하는 것을 허용하기 위하여 측 표면(638)은 또한 그 표면에 다수의 구멍을 갖는다.
도 7을 참고하면, 보조 섀시(728)는 도면 부호 736에서 대체적으로 지시된 장착 장치를 가지며, 이 장치는 (도 6에 도시된 바와 같은) 메인 섀시(626)에 대응하는 장착 장치(634)에 맞추어지도록 그리고 이 장착 장치에 용접되도록 형상화된다.
보조 섀시는 장착 장치(736)의 반대되는 표면의 가장 낮은 지점에 제공된 2개의 아암 장착 장치(748a 및 748b)를 포함한다. 아암 장착 장치(748a 및 748b) 각각은 한 쌍의 축 방향으로 정렬된 보어 형태이며, 작업 기능을 수행하기 위하여 피봇(700)에 장착된 유압 실린더(도시되지 않음)에 의하여 작동되도록 하기 위하여 이는 스태빌라이저 레그 장치, 도저 블레이드 장치 등이 보조 섀시(728) 상에 선회적으로 장착되는 것을 허용한다.
보조 섀시(728)는 역전된 U-채널을 한정하는 요부(750)를 가지며, 이 채널은 섀시의 측표면을 통하여 측 방향으로 연장되고 그리고 구동 차축(도시되지 않음)이 섀시에 장착되는 것을 허용하도록 구성된다. 이 실시예에서, 보조 섀시(728)는 보조 섀시의 양 표면 사이에서 연장하는 제 1 장착 프레임(764) 그리고 제 2 장착 프레임(보이지 않음)을 포함한다. 이 실시예에서, 장착 프레임은 보조 섀시(728)의 내부에 용접된다. 구동 차축은 제 1 및 제 2 장착 프레임 사이에서 연장된 피벗 부재(도시되지 않음)를 통하여 보조 섀시(728)에 고정되고, 이 배치는 구동 차축이 제한된 관절 운동을 할 수 있도록 하며, 그로 인하여 지면이 균일하지 않을지라도 휠이 지면 접촉 상태에 유지되도록 한다.
도 8을 참고하면, 대안적인 보조 섀시(828)가 도시된다. 이 도면의 대응하는 구성 요소는 도면의 대응 구성 요소는 도면의 대응 구성 요소는 도 7에 관하여 100이 더 큰 도면 부호가 붙여지며, 그리고 단지 차이점만이 설명된다. 보조 섀시(828)의 금속 프레임은 도 7에서 설명된 것과 실질적으로 동일하다. 이 실시예에서, 금속 플레이트를 요부(850)를 따라 고정하기 위하여 플레이트(866)는 보조 섀시의 양 측부에 용접된다. 보조 섀시(828)에 관하여 구동 차축을 고정하기 위하여 그리고 관절 운동을 방지하기 위하여, 플레이트(866)는 각 종단에서의 다수의 보어(868)를 포함하여 구동 차축(도시되지 않음)의 부착을 가능하게 한다.
크레인
도 9를 참고하면, 대안적인 작업 기계(910)가 도시되며, 이 실시예에서 작업 기계는 크레인이다. 작업 기계(910)는 도 5의 작업 기계(510)의 하부 주행체 조립체(912)와 유사한, 긴 보조 섀시를 갖는 하부 주행체 조립체(912)를 갖는다. 이 도면의 대응하는 구성 요소는 도면의 대응 구성 요소는 도면의 대응 구성 요소는 도 5에 관하여 접두사 "5" 대신에 접두사 "9"로 도면 부호가 붙여지며, 그리고 단지 차이점만이 설명된다.
상부 구조(914)는 이미 설명된 바와 같이 선회 링(916)을 통하여 하부 주행체(912)에 장착되어 상부 구조 그리고 작업 아암 장치(940)는 하부 주행체에 대하여 회전할 수 있다.
연결된 상부 구조(914)는 도시된 바와 같이 가장 낮은 위치에서 수평적으로 위치될 수 있는 망원경식 붐(telescopic boom) 형태의 크레인 작업 아암(940)을 갖는다. 본 실시예에서, 호이스트는 케이블(901) 그리고 윈치(902)를 포함하며, 여기서 윈치는 붐의 베이스에 제공된다. 전방과 대조적으로, 붐(940)의 후방에 모터(957) 그리고 윈치(902)를 위치시키는 것은 크레인의 들어올림 용량 그리고 전방 안정성을 향상시킨다.
이러한 실시예에서, 하부 주행체(912)는 하부 주행체에 연결된 4개의 스태빌라이저 레그(924)를 가지며, 그리고 들어올림 작동 동안에 스태빌라이저 레그 는 완전히 연장되어 하부 주행체의 휠(919)를 지면으로부터 들어올린다.
스태빌라이저/도저 연결 장치
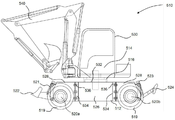
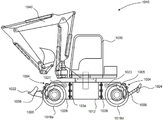
도 10, 도 11 및 도 12를 참고하면, 대안적인 작업 기계(1010)가 도시된다. 본 실시예의 구동 장치는 위에서 설명된 것과 실질적으로 동일한 것으로 간주될 수 있다. 도면의 대응 구성 요소는 도면의 대응 구성 요소는 도 9에 관하여 100이 더 큰 도면 부호가 붙여지며, 그리고 단지 차이점만이 설명된다.
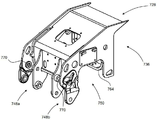
도 10 및 도 11에 도시된 실시예에서, 유압 실린더(1021, 1023) 형태의 선형 액추에이터는 하부 주행체의 적어도 3개의 측부에 의하여 하부 주행체 내에서 밀폐되어 있으며, 여기서 적어도 3개의 측부 중 하나는 실질적으로 공간 위에, 즉 조립된 작업 기계 내의 상부 구조체와 실질적으로 마주보는 하부 주행체의 측부 상에 위치된다. 이는 도 10 내에서 보여질 수 있다. 그러나 액츄에이터를 도시하기 위하여 하부 주행체의 상부 표면은 도 11 및 도 12에서 제거된다. 도시된 실시예에서, 연결 장치(1004)를 통하여 도저 블레이드 장치(1022) 또는 스태빌라이저 레그 장치(1024)를 작동시키기 위하여 유압 실린더는 보조 섀시(1028) 내에 장착되고 그리고 보조 섀시 내의 개구 밖으로 연장된다. 다른 아암에 연결됨에도 불구하고 양 연결 장치(1004)는 실질적으로 동일하다는 것과 문자 L을 형성하는 2개의 아암의 정점에서 보조 섀시(1028)에 선회적으로 장착된, 전체적으로 L형 레버(1005)를 포함한다는 것이 보여질 수 있다. L형 부재의 한 자유단은 유압 실린더(1021, 1023)에 선회적으로 연결되고 그리고 다른 자유단은 링크 아암(1006)의 종단에 선회적으로 연결된다. 링크 아암(1006)의 제 2 종단은 도저 블레이드(1022) 또는 스태빌라이저 레그(1024)에 선회적으로 연결된다. 이 연결 장치는 실린더(1021, 1023)의 일반적인 수평 연장 및 수축을 도저 블레이드 또는 스태빌라이저 레그의 일반적인 아치형 이동으로 효과적으로 전환시킨다.
도 12에 도시된 바와 같이, 도저 블레이드 장치(1022)를 장착할 때 다른 선형 연결 장치(1007)가 실질적으로 제공된다. 이 연결 장치(1007)는 L형 레버(1005)의 정점과 동일한 피봇점에서 보조 섀시에 선회적으로 장착된다. 연결 장치(1007)는 링크 아암(1006)과 동일한 선회점에서 도저 블레이드(1022) 또는 스태빌라이저 레그(1024)에 더 선회적으로 연결된다. 이동 동안에 연결 장치(1007)는 도저 블레이드(1022)의 상하 방향을 유지한다.
보조 섀시(1028) 내에 유압 실린더를 제공하는 것은 하부 주행체의 전체 치수를 최소화하며 그리고 운전자의 시계를 개선할 수 있다. 더욱이, 이 배치는 유압 실린더에 손상으로부터의 보호를 제공할 것이다.
크레인, 텔레핸들러 또는 굴삭기와 같은 다양한 작업 기계에 걸쳐 실질적으로 동일할 수 있는 메인 섀시를 제공하는 것은 부품의 개수를 줄일 수 있고 그리고 단일 생산 라인이 다수의 기계를 제조하는 것을 허용하며, 그로 인하여 비용이 줄어든다. 위에서 설명된 바와 같이 다수의 조립체로 나누어진다면 보다 많은 섀시를 수송을 위하여 주어진 체적으로 포장하는 것이 가능할 수 있음에 따라 다른 위치에서 제조 및 조립된다면 메인 섀시 및 보조 섀시의 운반을 더 효율적으로 함에 의하여 모듈식 장치는 또한 비용을 절감할 수 있다.
구동 차축 장착부를 제외하고 실질적으로 동일할 수 있는 보조 섀시를 제공하는 것은 하부 주행체 구성 요소의 더 낮은 비용 제조를 위하여 대량 생산에 의한 원가 절감이 제공되는 것을 허용할 수 있다.
변형예
본 발명이 하나 이상의 바람직한 실시예를 참고로 하여 위에서 설명되었을지라도, 청구범위에서 한정된 바와 같이 본 발명의 범위를 벗어나지 않고 다양한 변화 및 변형이 이루어질 수 있다는 것이 인식될 것이다.
본 발명이 특별하게 유리한 것으로 간주된 특정 기계 레이아웃의 문맥에서 설명되었을지라도, 상부 구조 내에 기관 및 유압 펌프를 갖는 일반적인 휠 부착 선회 굴삭기 또는 정역학적 또는 다른 형태의 변속기를 갖는 텔레핸들러, 야지용 크레인 등과 같은 더 일반적인 기계 내에서 본 발명이 사용된다면, 본 발명의 어떤 이점이 달성될 수 있다. 또한, 다른 실시예에서, 원동기는 측부 포드(side pod) 내부 대신에 메인 또는 보조 섀시 내에 위치될 수 있다.
대안적인 실시예에서, 메인 섀시는 블레이드 장치, 스태빌라이저 레그 장치 또는 트랙터형 유압 3-점 연결 장치 중 하나, 차축 그리고 유압 실린더를 위한 장착부를 가질 수 있다. 이 실시예에서, 메인 섀시는 메인 섀시 단지 하나의 보조 조립체를 장착하도록 구성될 수 있다.
다른 대안적인 실시예에서, 메인 섀시의 선단 및 후단에 요부를 한정하기 위하여 (예를 들어, 반대의 C-빔 형태의 섀시 레일들을 가짐에 의하여) 메인 섀시는 구성될 수 있다. 조립체가 메인 섀시 내의 요부 내로 삽입될 수 있도록 그리고 메인 섀시에 해제 가능하게 고정될 수 있도록 하기 위하여 부재들은 구성될 수 있다. 이 실시예에서, 서브 조립체는 스태빌라이저 레그 장치, 도저 아암 장치, 3-점 연결 장치 등일 수 있다. 대안적인 실시예에서, 서브 조립체는 또한 메인 섀시에 구동 차축을 장착할 수 있으며, 여기서 도 7 및 도 8에서 설명된 것과 유사한 방식으로 차축은 서브 조립체에 관하여 고정될 수도 또는 고정되지 않을 수 있다.
다른 실시예에서, 일반적인 기어 박스, 파워시프트 기어박스 및/또는 토크 컨버터 기어박스와 같은 대안적인 변속기 장치가 사용된다. IC 기관, 예를 들어 전기 모터 대신에 또는 IC 기관과 함께 대안적인 원동기가 또한 사용될 수 있다.
작업 기계는 수동 유압 또는 전자-유압 제어부를 이용하여 작동될 수 있다.
본 실시예에서, 양 차축 상의 휠들이 조향 가능(즉, 작업 기계는 4륜 조향을 위하여 구성된다)하지만, 대안적인 실시예에서는 차축들 중 어느 하나의 차축 상의 휠만이 조향 가능(즉, 작업 기계는 2륜 조향을 위하여 구성된다)할 수 있다.
Claims (20)
- 적어도 3개의 측부 상에서 밀폐된 공간을 한정하기 위하여 시트 금속 재료로부터 적어도 부분적으로 형성되며, 선행 액추에이터, 차축을 위한 장착부 그리고 선형 액추에이터의 제 1 종단을 위한 장착부를 포함하되, 선형 액추에이터의 제 1 종단을 위한 장착부는 공간 내에 위치되어 선형 액추에이터가 적어도 부분적으로 공간 내에 수용되는, 작업 기계용 하부 주행체.
- 제1항에 있어서, 밀폐된 측부 중 적어도 하나 내의 개구를 더 포함하는 하부 주행체.
- 제2항에 있어서, 선형 액추에이터는 하부 주행체의 밀폐된 측부 내의 개구를 통하여 연장되도록 구성된 하부 주행체.
- 제1항에 있어서, 선형 액추에이터는 공간 내에 실질적으로 수평적으로 장착된 하부 주행체.
- 제1항에 있어서, 선형 액추에이터의 제 2 종단에 부착된, 작업 기구로의 연결을 위한 연결 장치를 더 포함하는 하부 주행체.
- 제5항에 있어서, 연결 장치는 하부 주행체에 선회적으로 장착된, 실질적으로 L-형 레버를 포함하는 하부 주행체.
- 제6항에 있어서, L-형 레버는 링크 아암을 통하여 작업 기구에 연결된 하부 주행체.
- 제5항에 있어서, 작업 기구는 스태빌라이저 레그 장치인 하부 주행체.
- 제5항에 있어서, 작업 기구는 도저 블레이드 장치인 하부 주행체.
- 제5항에 있어서, 작업 기구는 3-점 연결 장치인 하부 주행체.
- 제5항에 있어서, 연결 장치는 액추에이터의 실질적인 수평 운동을 작업 기구의 실질적인 수직 아치형 움직임으로 변환시키도록 구성된 하부 주행체.
- 제1항에 있어서, 하부 주행체는 선단, 후단 그리고 선단과 후단 사이에서 연장된 적어도 하나의 측표면을 포함하는 하부 주행체.
- 제1항에 있어서, 측부 포드는 하부 주행체에 장착되며 그리고 원동기를 포함한 구동 장치를 포함하는 하부 주행체.
- 제13항에 있어서, 구동 장치를 제어하기 위한 전자 제어 유니트(ECU)를 더 포함하는 하부 주행체.
- 제1항에 있어서, 상부에 상부 구조를 장착하기 위한 장착 장치를 더 포함하는 하부 주행체.
- 제15항에 있어서, 장착 장치는 선회 링을 포함하는 하부 주행체.
- 제1항에 있어서, 메인 섀시와 적어도 하나의 보조 섀시를 포함하되, 하부 주행체를 형성하기 위하여 보조 섀시는 메인 섀시에 고정된 하부 주행체.
- 제17항에 있어서, 선형 액추에이터는 보조 섀시 내에 장착된 하부 주행체.
- 제1항에 있어서, 선형 액추에이터는 유압 액추에이터인 하부 주행체.
- 작업 작동을 수행할 수 있도록 구성된 작업 아암을 포함하는 상부 구조 및 청구항 1항에 따른 하부 주행체를 포함하되, 상부 구조는 하부 주행체에 장착된 작업 기계.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1419274.4A GB2531765B (en) | 2014-10-29 | 2014-10-29 | An undercarriage for a working machine |
| GB1419274.4 | 2014-10-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20160052391A true KR20160052391A (ko) | 2016-05-12 |
Family
ID=52103602
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150151365A Withdrawn KR20160052391A (ko) | 2014-10-29 | 2015-10-29 | 작업 기계용 하부 주행체 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20160122972A1 (ko) |
| EP (1) | EP3015604A1 (ko) |
| JP (1) | JP2016089617A (ko) |
| KR (1) | KR20160052391A (ko) |
| CN (1) | CN105564236A (ko) |
| GB (1) | GB2531765B (ko) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2531762A (en) * | 2014-10-29 | 2016-05-04 | Bamford Excavators Ltd | Working machine |
| US20180171792A1 (en) * | 2016-12-19 | 2018-06-21 | Caterpillar Global Mining Europe Gmbh | Machine and Method of Cutting Material |
| US20180179892A1 (en) * | 2016-12-22 | 2018-06-28 | Caterpillar Global Mining Europe Gmbh | Collision Avoidance Control Method and System |
| US11885221B2 (en) * | 2018-02-27 | 2024-01-30 | Joy Global Surface Mining Inc | Shovel stabilizer appendage |
| USD921057S1 (en) * | 2019-06-26 | 2021-06-01 | J.C. Bamford Excavators Limited | Excavator |
| NL2024981B1 (en) * | 2020-02-24 | 2021-10-14 | Hudson I P B V | Electric drive of mobile apparatus |
| US11459034B2 (en) * | 2021-01-20 | 2022-10-04 | J.C. Bamford Excavators Limited | Undercarriage |
| CN114032985A (zh) * | 2021-11-26 | 2022-02-11 | 江苏徐工工程机械研究院有限公司 | 可高效挖掘的挖掘装载机 |
| EP4729699A1 (en) * | 2024-10-18 | 2026-04-22 | Volvo Construction Equipment AB | Actuator for moving a blade unit relative to a frame of a construction machine and associated construction machine |
Family Cites Families (51)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2980271A (en) * | 1957-02-11 | 1961-04-18 | Yale & Towne Mfg Co | Lifting mechanism for industrial truck |
| US4077141A (en) * | 1976-09-08 | 1978-03-07 | Caterpillar Tractor Co. | Tire protector assembly for a wheel loader |
| US4151920A (en) * | 1977-07-11 | 1979-05-01 | Caterpillar Tractor Co. | Vehicle main frame |
| US4215874A (en) * | 1978-12-18 | 1980-08-05 | J. I. Case Company | Articulation lock |
| US4220215A (en) * | 1979-07-26 | 1980-09-02 | Caterpillar Tractor Co. | A-frame for carrying loads on a loader |
| US4360311A (en) * | 1979-10-22 | 1982-11-23 | Serge Dufour | Public works machine, such as a hydraulic self-propelled articulated shovel |
| US4318664A (en) * | 1980-05-20 | 1982-03-09 | Pierre Gibert | Self-stabilizing load lifting and handling vehicle |
| US4369989A (en) * | 1980-08-01 | 1983-01-25 | Standard Manufacturing Company, Incorporated | Stabilizing jack for skid steer vehicle |
| FR2488206B1 (fr) * | 1980-08-07 | 1985-07-12 | Poclain Sa | Chassis porteur d'un engin mobile a bati central et longerons |
| US4427334A (en) * | 1982-02-17 | 1984-01-24 | Raygo, Inc. | Load handling apparatus |
| FR2530604B1 (fr) * | 1982-07-23 | 1986-06-20 | Gibert Pierre | Vehicule de manutention a bras orientable et chassis stabilisateur incorpore |
| US4512589A (en) * | 1982-12-27 | 1985-04-23 | Cooper Industries Inc. | Oscillating axle override system |
| US4944649A (en) * | 1986-07-21 | 1990-07-31 | Stralow Cecil J | Mechanism for coupling subordinate machine to tractor |
| US4796366A (en) * | 1987-02-27 | 1989-01-10 | Scully Robert M | Plow/scraper assembly for earth mover vehicle |
| US4836740A (en) * | 1987-12-28 | 1989-06-06 | Clark Equipment Company | Pivotal attachment structure |
| US5169278A (en) * | 1990-09-05 | 1992-12-08 | Clark Equipment Company | Vertical lift loader boom |
| US5778569A (en) * | 1995-04-02 | 1998-07-14 | Karl Schaeff Gmbh & Co. | Multi-purpose construction vehicle with at least two subframes and a self-aligning bearing between the subframes |
| JPH09209403A (ja) * | 1996-02-02 | 1997-08-12 | Komatsu Zenoah Co | センターフレーム |
| JP3155700B2 (ja) * | 1996-02-08 | 2001-04-16 | 新キャタピラー三菱株式会社 | 装軌式車両 |
| JP2002513451A (ja) * | 1996-07-12 | 2002-05-08 | キャタピラー インコーポレイテッド | 建設機械用フレームアセンブリ |
| US6409459B1 (en) * | 1998-01-30 | 2002-06-25 | Caterpillar Inc. | Linkage assembly for connecting a work implement to a frame of a work machine |
| US6158525A (en) * | 1998-07-10 | 2000-12-12 | Komatsu Ltd. | Main frame structure and steering case of construction equipment |
| AU7550700A (en) * | 1999-10-08 | 2001-04-23 | Anne Frances O'Connell | Earth moving apparatus |
| JP3514694B2 (ja) * | 2000-03-17 | 2004-03-31 | 株式会社クボタ | 旋回作業機の下部構造 |
| US6616398B2 (en) * | 2000-11-30 | 2003-09-09 | Caterpillar S.A.R.L. | Lift boom assembly |
| US6684537B2 (en) * | 2001-05-28 | 2004-02-03 | Kubota Corporation | Excavator with a piping structure for absorbing variations in hose length |
| US20030066214A1 (en) * | 2001-10-10 | 2003-04-10 | Strong Victor R. | Scraper bowl with cutting edge crowd |
| JP2003276461A (ja) * | 2002-01-18 | 2003-09-30 | Kanzaki Kokyukoki Mfg Co Ltd | 作業車輌 |
| JP4080974B2 (ja) * | 2003-08-12 | 2008-04-23 | 株式会社クボタ | ホイール式作業機 |
| WO2005061805A1 (ja) * | 2003-12-18 | 2005-07-07 | Hitachi Construction Machinery Co., Ltd. | 建設機械のスイベルジョイント |
| US7264435B2 (en) * | 2005-05-26 | 2007-09-04 | Caterpillar S.A.R.L. | Lift boom assembly |
| EP1930190A4 (en) * | 2005-09-29 | 2010-11-17 | Kubota Kk | WHEEL TYPE WORK MACHINE |
| JP2007154519A (ja) * | 2005-12-06 | 2007-06-21 | Toyota Industries Corp | 作業車両及びスキッドステアローダ |
| EP2368787B1 (en) * | 2005-12-13 | 2014-05-14 | Cody L. Sewell | Compact tool carrier with articulation joint |
| US7854402B1 (en) * | 2007-10-02 | 2010-12-21 | Travis Tonny D | Hydraulic system valving |
| US7736117B2 (en) * | 2007-10-31 | 2010-06-15 | Caterpillar Inc. | Linkage assembly |
| CA2646032C (en) * | 2007-12-13 | 2016-06-21 | Volvo Construction Equipment Holding Sweden Ab | Manual leveling control system and method for construction equipment |
| US8545163B2 (en) * | 2008-06-26 | 2013-10-01 | Kubota Corporation | Loader work machine |
| DE202008013896U1 (de) * | 2008-10-17 | 2010-03-11 | Liebherr-Hydraulikbagger Gmbh | Verfahrbares Arbeitsgerät |
| JP5156693B2 (ja) * | 2009-06-17 | 2013-03-06 | 日立建機株式会社 | 産業車両のエンジン回転数制御装置 |
| NL2004954C2 (nl) * | 2010-05-31 | 2011-12-01 | Hudson Bay Holding B V | Mobiele inrichting. |
| EP2765241B1 (en) * | 2011-10-07 | 2017-12-13 | Hitachi Construction Machinery Co., Ltd. | Earthmoving apparatus for construction machine |
| JP2013117145A (ja) * | 2011-12-05 | 2013-06-13 | Hitachi Constr Mach Co Ltd | ホイール式作業車両 |
| WO2014098652A1 (en) * | 2012-12-17 | 2014-06-26 | Volvo Construction Equipment Ab | Front frame arrangement for a working machine and a wheel loader |
| US20140306426A1 (en) * | 2013-04-12 | 2014-10-16 | Caterpillar Inc. | Steering linkage arrangement for articulated mobile machine |
| GB2531766A (en) * | 2014-10-29 | 2016-05-04 | Bamford Excavators Ltd | Working Machine |
| GB2531763A (en) * | 2014-10-29 | 2016-05-04 | Bamford Excavators Ltd | Working machine |
| GB2531768B (en) * | 2014-10-29 | 2018-01-17 | Bamford Excavators Ltd | An Undercarriage for a Working Machine |
| GB2531764A (en) * | 2014-10-29 | 2016-05-04 | Bamford Excavators Ltd | Working machine |
| GB2531762A (en) * | 2014-10-29 | 2016-05-04 | Bamford Excavators Ltd | Working machine |
| GB2531767A (en) * | 2014-10-29 | 2016-05-04 | Bamford Excavators Ltd | Working Machine |
-
2014
- 2014-10-29 GB GB1419274.4A patent/GB2531765B/en active Active
-
2015
- 2015-10-28 JP JP2015211646A patent/JP2016089617A/ja active Pending
- 2015-10-29 EP EP15192196.2A patent/EP3015604A1/en not_active Withdrawn
- 2015-10-29 US US14/927,399 patent/US20160122972A1/en not_active Abandoned
- 2015-10-29 CN CN201510717157.0A patent/CN105564236A/zh active Pending
- 2015-10-29 KR KR1020150151365A patent/KR20160052391A/ko not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016089617A (ja) | 2016-05-23 |
| CN105564236A (zh) | 2016-05-11 |
| GB201419274D0 (en) | 2014-12-10 |
| US20160122972A1 (en) | 2016-05-05 |
| EP3015604A1 (en) | 2016-05-04 |
| GB2531765A (en) | 2016-05-04 |
| GB2531765B (en) | 2017-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9828049B2 (en) | Working machine | |
| US11111649B2 (en) | Working machine | |
| US9592733B2 (en) | Working machine | |
| KR102657223B1 (ko) | 작업 기계용 하부 주행체 | |
| KR20160052391A (ko) | 작업 기계용 하부 주행체 | |
| JP2016089618A5 (ko) | ||
| CN105569107B (zh) | 工作机 | |
| US20160122971A1 (en) | Working machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20151029 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination |