KR20170049450A - 4-모터 다이렉트 드라이빙 시스템 - Google Patents
4-모터 다이렉트 드라이빙 시스템 Download PDFInfo
- Publication number
- KR20170049450A KR20170049450A KR1020160141446A KR20160141446A KR20170049450A KR 20170049450 A KR20170049450 A KR 20170049450A KR 1020160141446 A KR1020160141446 A KR 1020160141446A KR 20160141446 A KR20160141446 A KR 20160141446A KR 20170049450 A KR20170049450 A KR 20170049450A
- Authority
- KR
- South Korea
- Prior art keywords
- electric motors
- control unit
- vehicle
- vehicle control
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2036—Electric differentials, e.g. for supporting steering vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
- B60K1/02—Arrangement or mounting of electrical propulsion units comprising more than one electric motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangement or mounting of propulsion-unit control devices in vehicles
- B60K26/02—Arrangement or mounting of propulsion-unit control devices in vehicles of initiating means or elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K7/0007—Disposition of motor in, or adjacent to, traction wheel the motor being electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/32—Control or regulation of multiple-unit electrically-propelled vehicles
- B60L15/38—Control or regulation of multiple-unit electrically-propelled vehicles with automatic control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/51—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells characterised by AC-motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/52—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells characterised by DC-motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/04—Brake-action initiating means for personal initiation foot actuated
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P5/00—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors
- H02P5/46—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors for speed regulation of two or more dynamo-electric motors in relation to one another
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K2007/0092—Disposition of motor in, or adjacent to, traction wheel the motor axle being coaxial to the wheel axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/40—DC to AC converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/42—Electrical machine applications with use of more than one motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/46—Wheel motors, i.e. motor connected to only one wheel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/14—Acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/24—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/427—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/28—Four wheel or all wheel drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/91—Electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
본 출원은 차량에 관한 것으로서, 좀 더 구체적으로는 모터의 다이렉트 드라이빙 시스템에 관한 것이다. 본 출원의 실시 예에 따른 차량 드라이빙 시스템은 두 개 이상의 전기 모터들, 가변 입력 제어의 작동 포지션을 나타내는 신호를 제공하도록 구성된 상기 가변 입력 제어, 두 개 이상의 휠들(wheels) 및 상기 두 개 이상의 전기 모터들의 전압 입력들을 제어하도록 구성된 차량 제어 유닛을 포함하며, 상기 차량 제어 유닛은, 상기 가변 입력 제어의 작동 포지션을 나타내는 정보를 수신하고, 수신된 상기 정보에 기초하여 상기 두 개 이상의 전기 모터들에 대한 전압 입력들을 결정하며, 상기 전압 입력들을 상기 두개 이상의 전기 모터들로 달성시키는(effectuate) 명령들을 생성한다. 본 출원에 따른 차량 드라이빙 시스템은 전기 자동차의 주행성과 핸들링을 향상시킬 수 있다.
Description
본 출원은 차량에 관한 것으로서, 좀 더 구체적으로는 모터의 다이렉트 드라이빙 시스템에 관한 것이다.
전기 자동차는 전통적인 내연기관 자동차에 대한 점점 더 실현 가능한 대안이 되고 있다. 전기 자동차는 전기 자동차에 사용되는 전기가 원래 생성되는 방법에 따라, 소형이며 간단하고 잠재적으로 보다 환경 친화적이라는 이점이 있다. 오일 자원은 전 세계적으로 점점 더 고갈되고 있기 때문에, 가솔린 대신 재생 에너지 자원을 사용하여 자동차를 작동시키는 전망은 확실히 이점이 있다.
전기 자동차 및/또는 하이브리드 자동차의 제조자들은 일반적으로 전기 모터(electric motor)를 자동차로 구성함에 있어서 두 가지 접근 방법 중 하나를 취한다. 첫 번째 접근방법은 전기 모터를 자동차 안에 내연기관과 함께 배치하거나 또는 내연기관을 대체하여 배치하는 것이며, 따라서 차축과 바퀴에 동력을 전달하기 위해 변속 시스템(transmission system) 및 기어박스의 기존 구조를 이용할 수 있다.두 번째 접근 방법은 전기 모터를 휠(wheel)의 내부 캐비티(internal cavity)에 직접 배치하는 것이다. 인 휠 모터(in-wheel motors)는 매우 간단하고 소형이라는 장점이 있다. 이와 같은 시스템의 단점은 휠 내의 추가적인 하중이 차량의 주행성과 핸들링에 안 좋은 영향을 미치는 스프링 하중량(unsprung mass)를 증가 시킨다는 것이다.
본 발명은 전기 모터를 이용한 차량과 관련된 문제들 및 제반 문제를 해결하여 현재 전기 차량의 한계를 극복하는 것에 그 목적이 있다.
본 출원의 실시 예에 따른 차량 드라이빙 시스템은 두 개 이상의 전기 모터들 -상기 두 개 이상의 전기 모터들 각각은 전압 입력을 가짐 -; 가변 입력 제어의 작동 포지션을 나타내는 신호를 제공하도록 구성된 상기 가변 입력 제어; 두 개 이상의 휠들(wheels) -상기 두 개 이상의 휠들 각각은 차축에 의해 상기 두 개 이상의 전기 모터들 중 하나에 연결됨 -; 및 상기 두 개 이상의 전기 모터들의 전압 입력들을 제어하도록 구성된 차량 제어 유닛을 포함하며, 상기 차량 제어 유닛은, 상기 가변 입력 제어의 작동 포지션을 나타내는 정보를 수신하고; 수신된 상기 정보에 기초하여 상기 두 개 이상의 전기 모터들에 대한 전압 입력들을 결정하며; 상기 전압 입력들을 상기 두개 이상의 전기 모터들로 달성시키는(effectuate) 명령들을 생성한다.
본 개시(disclosure)의 예시적인 실시 예들은 상술한 문제들의 적어도 일부를 해결할 수 있다. 예를 들어, 본 개시의 일부 실시 예들은 변속 시스템이나 기어 박스 시스템의 필요를 제거하여 현재 전기 차량의 한계를 극복할 수 있다. 한 측면에서, 본 개시는 드라이빙 시스템과 관계가 있다. 드라이빙 시스템은 각각 전압 입력을 가지고 차축과 차량의 타이어에 연결되는 두 개 이상의 전기 모터들을 포함할 수 있으며, 가변 입력 제어는 현재의 작동 포지션을 나타내는 신호를 차량 제어 유닛으로 제공할 수 있다. 차량 제어 유닛은 차량 가변 입력 제어로부터 정보를 취하고 각 전기 모터의 전압 입력에 얼마나 많은 파워를 보내야 할지 결정한다.
일부 예에서, 드라이빙 시스템은 DC 전압을 AC 전압으로 변환하는 인버터를 포함할 수 있다. 인버터는 차량 제어 유닛의 출력 신호를 수신하고, 전기 모터에 입력되기 전에 그 전압을 수정한다. 인코더는 전기 모터 근처나 그 위에 배치될 수 있다. 인코더는 전기 모터의 기계적 출력을 기록하고 그 정보를 차량 제어 유닛에 송신한다. 가변 입력 제어의 예로서 액셀러레이터 페달, 브레이크 페달 및 스티어링 휠을 포함할 수 있다.
일부 실시 예에서, 차동 전달(differential transmission)이 차량 제어 유닛에 의해 가능하게 된다. 예를 들어, 차량 제어 유닛은, 전기 모터들에 연결된 타이어들이 상이한 속력에서 회전할 수 있도록 균등하지 않은 전압들을 상이한 전기 모터들에게 분재하도록 구성될 수 있다. 전기 모터들은 연결된 휠들과 분리되고 구별될 수 있다.
본 발명의 부가적인 특징들, 이점들 및 실시 예들은 이하의 상세한 설명, 도면 및 청구항으로부터 개진되고 분명할 수 있다. 또한 발명의 요약 및 상세한 설명은 모두 예시적인 것이며 청구된 발명의 범위를 제한하는 것이 없이 부가 정보를 제공하기 위함이다. 그러나, 상세한 설명과 특정한 예들은 오로지 본 발명의 바람직한 실시 예를 가리킨다. 본 출원의 청구항에서 제시된 본 출원의 기술적 사상의 범주를 벗어나지 않은 채로, 기능 및 구성요소의 배치에 대한 다양한 변경과 수정이 이루어질 수 있음이 이해될 것이다.
본 출원에 따른 차량 드라이빙 시스템은 전기 자동차의 주행성과 핸들링을 향상시킬 수 있다.
본 발명에 대한 이해를 제공하기 위해 포함되는 첨부 도면들은 본 명세서에 통합되어 그 일부를 이루며 본 발명의 실시 예들을 보여주고 상세한 설명과 함께 본 발명의 원리를 설명한다. 발명 및 발명이 실시되는 다양한 방식에 대한 기본적인 이해에 필요한 것 이상의 발명의 보다 구체적인 구조적 세부사항을 도시하기 위한 의도는 없다.
도 1은 드라이빙 시스템의 예시적 실시 예의 시스템 다이어그램이다.
도 2는 차량 제어 유닛의 예시적 실시 예의 시스템 다이어그램이다.
도 3은 인코더를 구비하는 드라이빙 시스템의 예시적 실시 예의 시스템 다이어그램이다.
도 4는 인코더를 구비하는 차량 제어 유닛의 예시적 실시 예의 시스템 다이어그램이다.
도 5는 본 개시의 예시적인 실시 예에 따른 4-모터 다이렉트 드라이빙 시스템의 탑 뷰(top-view)를 나타낸다.
도 6은 본 개시의 예시적인 실시 예에 따른 4-모터 다이렉트 드라이빙 시스템의 후면도를 나타낸다.
도 7은 본 개시의 예시적인 실시 예에 따라 등속 조인트를 사용하는 4-모터 다이렉트 드라이빙 시스템의 후면도를 나타낸다.
도 8은 피봇 시스템을 사용하는 4-모터 다이렉트 드라이빙 시스템의 후면도를 나타낸다.
도 9는 다양한 컴포넌트들이 어떻게 상호작용하는 지를 나타내는 4-모터 다이렉트 드라이빙 시스템의 시스템 다이어그램이다.
도 10은 본 개시의 예시적인 실시 예에 따라 차량을 드라이빙하는 방법의 플로우 다이어그램이다.
도 11은 하나 이상의 논의된 동작들을 수행하는데 사용되는 간략화한 컴퓨터 시스템을 나타낸다.
첨부된 도면들, 유사한 컴포넌트들 및/또는 특징들은 동일한 참조 번호를 가질 수 있다. 또한, 동일한 유형의 다양한 컴포넌트들은 참조 번호에 이은 유사한 컴포넌트들 및/또는 특징들을 구별하는 문자들로 구별될 수 있다. 명세서에서 첫번째 참조 번호만 사용된다면, 그 설명은 문자 접미사와 상관없이 동일한 첫번째 참조 번호를 가지는 유사한 컴포넌트들 및/또는 특징들 중 임의의 하나에 적용될 수 있다.
도 1은 드라이빙 시스템의 예시적 실시 예의 시스템 다이어그램이다.
도 2는 차량 제어 유닛의 예시적 실시 예의 시스템 다이어그램이다.
도 3은 인코더를 구비하는 드라이빙 시스템의 예시적 실시 예의 시스템 다이어그램이다.
도 4는 인코더를 구비하는 차량 제어 유닛의 예시적 실시 예의 시스템 다이어그램이다.
도 5는 본 개시의 예시적인 실시 예에 따른 4-모터 다이렉트 드라이빙 시스템의 탑 뷰(top-view)를 나타낸다.
도 6은 본 개시의 예시적인 실시 예에 따른 4-모터 다이렉트 드라이빙 시스템의 후면도를 나타낸다.
도 7은 본 개시의 예시적인 실시 예에 따라 등속 조인트를 사용하는 4-모터 다이렉트 드라이빙 시스템의 후면도를 나타낸다.
도 8은 피봇 시스템을 사용하는 4-모터 다이렉트 드라이빙 시스템의 후면도를 나타낸다.
도 9는 다양한 컴포넌트들이 어떻게 상호작용하는 지를 나타내는 4-모터 다이렉트 드라이빙 시스템의 시스템 다이어그램이다.
도 10은 본 개시의 예시적인 실시 예에 따라 차량을 드라이빙하는 방법의 플로우 다이어그램이다.
도 11은 하나 이상의 논의된 동작들을 수행하는데 사용되는 간략화한 컴퓨터 시스템을 나타낸다.
첨부된 도면들, 유사한 컴포넌트들 및/또는 특징들은 동일한 참조 번호를 가질 수 있다. 또한, 동일한 유형의 다양한 컴포넌트들은 참조 번호에 이은 유사한 컴포넌트들 및/또는 특징들을 구별하는 문자들로 구별될 수 있다. 명세서에서 첫번째 참조 번호만 사용된다면, 그 설명은 문자 접미사와 상관없이 동일한 첫번째 참조 번호를 가지는 유사한 컴포넌트들 및/또는 특징들 중 임의의 하나에 적용될 수 있다.
본 출원은, 이의 전체로 참고문헌으로 본원에 포함된 내용인, 2015년 10월 27일에 출원된 US 정규출원 14/923,432의 연속이다.
본 출원의 다양한 실시 예들이 첨부된 도면을 참조하여 설명될 것이다. 비록 이하의 설명에서 본 출원의 실시 예에 따른 다양한 예시적인 구조 및 구성요소를 설명하기 위하여 "앞(front)", "뒤(rear)", "상위(upper)", "하위(lower)", "좌(left)", "우(right)" 등과 같이 방향을 나타내는 용어가 사용된다고 하더라도, 이는 단지 설명의 편의를 위한 것이며 첨부된 도면의 방향에 따라 결정되는 것에 불과함이 이해될 것이다. 다른 방향으로 본 출원에 따른 실시 예들이 배열될 수 있기 때문에, 이러한 용어들은 단지 설명을 위한 것이며 본 발명을 한정하기 위한 것이 아님이 이해될 것이다. 가능한 한, 동일한 구성요소를 나타내기 위하여 동일하거나 유사한 참조번호가 이하에서 사용될 것이다.
다르게 정의되지 않는 한, 여기서 사용되는 모든 기술 용어들은 본 발명이 속하는 영역의 당업자가 일반적으로 이해하는 것과 동일한 의미를 가진다. 본 발명의 실시 예들과 다양한 기술특징들과 그 유익한 세부사항은 첨부된 도면에서 설명되거나 도시되고 후술하는 설명에서 더 자세히 다뤄지는 한정되지 않는 실시 예들과 예를 참조하여 보다 완전하게 설명된다. 도면에 도시된 특징들은 스케일(scale)될 필요가 없으며, 한 실시 예의 특징들은 여기에 명백하게 언급되어 있지 않더라도 당업자가 인식한대로 다른 실시 예들에도 적용될 수 있음을 주의해야 한다. 본 발명의 실시 예들을 불필요하게 불명확하게 하지 않도록 잘 알려진 컴포넌트와 프로세싱 기술들의 설명은 생략될 수 있다. 여기에 사용되는 예들은 단지 발명이 실시되는 방식에 대한 이해를 가능하게 하고 나아가 당업자들이 발명의 실시 예들을 실시하는 것을 가능하게 하기 위한 것이다. 따라서, 여기의 실시 예들과 예시들은 오로지 청구항들과 적용가능한 법에 의해서 정해지는 발명의 범위를 한정하는 것으로 해석되어서는 안된다. 또한, 참조번호는 도면의 몇몇의 뷰(views)에 걸쳐 유사한 부분을 참조할 수 있다.
본 개시의 일부 실시 예들은 독립적인 차축을 통해 자동차의 휠(wheel)에 다이렉트로(directly) 부착되는 전기 모터로 구성되는 자동차 드라이빙 시스템을 포함한다. 본 발명의 실시 예들은 변환/기어 박스 시스템의 필요를 제거함으로써, 기존의 전기 자동차의 한계를 극복한다. 본 발명의 실시 예들은 인-휠 전지 모터를 사용하지 않음으로써, 현재 전기 자동차의 한계를 보다 더 극복한다. 전기 모터를 휠 허브(wheel hub)에 떨어뜨려서 구성함으로써, 차량의 스프링 하중량를 감소시켜 차량의 주행성과 핸들링을 향상시킨다. 각 전기 모터에 전달되는 동력(power)은, 엑셀러레이터 페달(accelerator pedal), 브레이크 페달(brake pedal), 스티어링 휠(steering wheel) 및 인코더(encoders)에 의해 수집된 정보를 분석하고 동력을 분배하는 차량 제어 유닛에 의해 결정된다.
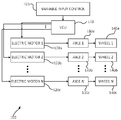
도 1은 본 개시의 예시적인 실시 예인 드라이빙 시스템(100)을 도시한다. 드라이빙 시스템(100)에서 가변 입력 제어(variable input control)(105)는 차량 제어 유닛(110)에 그 작동 포지션(operational position)에 대한 정보를 제공한다. 일부 실시 예에서, 가변 입력 제어(105)는 엑셀러레이터 페달, 브레이크 페달 또는 스티어링 휠일 수 있다. 일부 실시 예에서, 가변 입력 제어(105)의 작동 포지션은 자신의 현재 상태이다. 예를 들어, 브레이크 페달의 작동 포지션은 "50% 눌러짐(pressed)" 또는 "100% 눌러진"일 수 있다. 또한, 스티어링 휠의 작동 포지션은 "0 도 회전된", "플러스(positive) 15도 회전된" 또는 "마이너스(negative)15도 회전된"일 수 있다.
차량 제어 유닛(110)은 가변 입력 제어(105)의 작동 포지션에 대한 정보를 취해 얼마나 많은 동력/전압(voltage)을 전기 모터들(120), 즉, 전기 모터 1부터 전기 모터 N까지에 분배할 것인지를 결정하며, 여기서 N은 전기 모터들의 총 수이다. N개의 전기모터들(120)은 그 뒤 회전 동력을 차축들(axles)(130), 즉 차축 1에서부터 차축 N까지에 제공한다. 전기 모터들, 차축들 및 휠들(N)의 수는 1처럼 작을 수 있으며 상한치(upper-bound-limit)를 가지지 않는다.
일부 실시 예에서, 차량 제어 유닛(110)은 오로지 가변 입력 제어(105)에 의해 제공되는 정보에 기초해서 전기 모터들(120)에 얼마나 많은 동력을 제공할 것인지 결정한다. 예를 들어, 일부 실시 예에서, 차량 제어 유닛(110)은 액셀러레이터가 "100% 눌러진" 것을 나타내는 신호를 가변 입력 제어(105)로부터 수신하고, 최고치의 동력/전압이 전기 모터들(120)에 동등하게 할당될 것을 결정한다. 다른 예시로서, 차량 제어 유닛(110)은 브레이크 페달이 "100%눌러진" 것을 나타내는 신호를 가변 입력 제어(105)로부터 수신하고, 제로(zero) 동력/전압이 전기 모터들(120)에 전달되어야 한다고 결정한다.
일부 실시 예에서, 차량 제어 유닛(110)은 상이한 모터들에게 전력을 비균등하게 분배하는 것이 가능하도록 구성될 수 있다. 상이한 휠들이 방향 전환(turns) 동안 다른 속도로 회전할 수 있도록 하는, 기계적 자동차 미분(a mechanical automobile differential)의 전기적 등가(electrical equivalent)와 유사한 것을 성취할 수 있다. 예를 들어, 차량이 4개의 휠(즉,N=4)를 가지고 있으며 오른쪽이나 왼쪽으로 방향을 전환할 때, 4개의 모든 휠이 일반적으로 다른 속도로 이동(traveling)할 것이다. 내부(inside) 회전 휠들(차량이 회전하는 방향으로 차량의 같은 쪽에 있는 휠들)은 휠들이 이동해야 하는 더 작은 거리 때문에, 외부 회전 휠들(차량의 회전하는 방향으로 차량의 반대쪽에 있는 휠들) 보다 느린 속력으로 회전하게 된다. 이와 유사하게, 후방 휠(rear wheel)은 차의 같은 쪽(side)에 위치한 전방 휠(front wheel)보다 느린 속도로 이동할 것이다.
일부 실시 예에서, 차량 제어 유닛(110)은 전기 모터들(120) 사이에서 효율적인 방식으로 동력을 분배하기 위해, 스티어링 각도, 액셀러레이터 페달로부터의 신호 및 차량의 폭에 기초하여 순환(circulation)을 수행하도록 구성될 수 있다. 일부 실시 예에서, 차량 제어 유닛(110)은 휠 속력에 대한 이론적인 공식을 사용하여 각 전기 모터에 사용되는 파워 레벨(power level)을 계산하기 위한 프로세싱 수단을 가질 수 있다. 일부 실시 예에서, 차량 제어 유닛(110)은 차량 폭과 다른 파라미터들이 알려진 룩업 테이블(lookip table)을 사용하여 요구되는 파워 레벨을 결정할 수 있다. 룩업 테이블은 액셀러레이터 페달로부터의 신호인 제1 입력 변수 및 현재 스티어링 각도인 제2 입력 변수가 있는 2차원(two-dimensional)일 수 있다. 일부 실시 예에서, 룩업 테이블은 1차원일 수 있으며, 액셀러레이터 페달로부터의 신호는 무시될 수 있다. 예를 들어, 룩업 테이블은 현재 스티어링 각도인 단일 입력 변수를 가질 수 있다. 룩업 테이블의 값들은 상이한 전기 모터들에 분배되는 파워 양(amounts of power) 사이의 비율일 수 있다. 각 전지 모터에 분배되는 파워 레벨들은 허용가능한 최고치 파워 또는 일부 전체 파워 출력(some total power output)에 의해 곱해진 비율일 수 있다.
일부 실시 예에서, 전기 모터들, 차축들 및 휠들의 개수는 둘일 수 있다(N=2). 예를 들어, 도 1의 시스템은 스쿠터, 전기 오토바이 및 다른 2륜 차량(two wheeled vehicles)에서 구현될 수 있다. 일부 실시 예에서, 스쿠터를 위한 가변 입력 제어(105)는, 원하는 속력과 관련하여 정보를 차량 제어 유닛(110)에 주는 위치 센서 및 각도 센서를 포함하는 핸들 액셀러레이터일 수 있다. 가변 입력 제어(105)는 풋 브레이크(foot brake), 핸들 브레이크(handle brake) 또는 스티어링 앵글(steering angle)일 수 있다. 차량 제어 유닛(110)은 또한 수직 축에 대한 스쿠터의 기울어진 각도에 대한 정보를 모을 수 있다. 스쿠터나 그 밖의 2륜 차량에서, 상이한 모터들에 얼마만큼의 파워를 분배해야하는 지의 결정은 4륜 구현보다 일반적으로 더 간단한 계산이다. 스쿠터가 회전쪽으로 많이 기우는 경우에는 전방 휠과 후방 휠사이의 스피드의 변동(variation)이 매우 작을 것이며, 따라서 차량 제어 유닛(110)은 필수적으로 동일한 양의 파워를 양쪽 휠들에게 분배할 것이다. 스쿠터가 터닝(turning)하고 기울기 각도가 작다면, 즉, 스쿠터가 회전 쪽으로 많이 기울지 않는다면 전방 휠과 후방 휠사이의 스피드의 변동은 보다 클 것이며, 4-모터(four motor) 구현으로 만들어지는 유사한 계산을 하게 될 것이다.
일부 실시 예에서, 도 1의 시스템은, 휠들이 프론트 앤 백(front and back) 구성보다는 사이드 투 사이드(side to side)구성으로 배열되는 SegwayTM 과 같은 2륜 차량에 구현될 수 있다. 가변 입력 제어(105)는 사용자각 특정 방향으로 기울었을 때 사용자의 체중 배치일 수 있다. 가변 입력 제어(105)는 또한 핸들 바(handle bar) 또는 핸드헬드(handheld) 제어 장치에 대한 스티어링 제어일 수 있다. 일부 실시 예에서, 차량 제어 유닛(110)은, 4-모터 디자인에서 행해질 수 있는 단순히 차량으로 하여금 회전하도록 적응시키는 것 보다는, 차량으로 하여금 강제로 회전시키는 방식으로 두 휠들 사이에서 파워를 분배할 수 있다. 예를 들어, 사이드 투 사이드 휠 구성을 가지는 2륜 차량은 휠들 자신이 차량 섀시(chassis)에 대하여 각도를 가지도록 하지 않으며, 사용자의 기울어짐은 저절로 차량을 조절하는 것에 미치는 영향이 작으며, 방향 전환을 실행시키는 유일한 방법은 휠들 중 하나를 다른 휠보다 더 빠르게 회전시키는 것이다. 차량 제어 유닛(110)은 첫째로 가변 입력 제어(105)로부터 받은 신호에 기초하여 사용자가 터닝하고 싶은 각도를 결정한다. 두번째로, 차량 제어 유닛(110)은 좌측 모터와 우측 모터 사이에서 파워를 불균형하게 분배한다. 사용자가 (가변 입력 제어(105)를 통해) 원하는 스티어링 각도가 0이라고 나타내면, 차량 제어 유닛(110)은 각 모터에 분배되는 파워를 균등하게 한다. 균등한 파워는, 터닝 동안 분배되는 파워의 평균 값, 터닝하는 동안 분배되는 파워의 제곱 평균 값, 또는 다른 계산으로 설정될 수 있다.
일부 실시 예에서, 전기 모터들, 차축들 및 휠들의 개수는 넷보다 훨씬 많을 수 있다(N>>4). 예를 들어, 버스, 세미트럭 및 기차는 도 1의 시스템을 구현할 수 있다. 기차에서, 차량 제어 유닛(110)은, 심지어 터닝 중에도 기차의 같은 쪽의 모터들에 동일한 양으로 파워를 분배할 수 있다. 4륜 차들과 달리, 트랙을 이동하는 차량은 후방 휠들이 전방 휠들보다 더 급하게 회전할 수 없기 때문에, 같은 쪽의 휠들의 속력의 적은 차이를 가진다. 따라서, 일부 실시 예에서, 차량 제어 유닛(110)은 기차의 같은 쪽에 있는 모터들에게 분배되는 파워가 같도록 계산할 수 있다.
도 2는 차량 제어 유닛(200)의 예시적인 실시 예를 나타낸다. 일부 실시 예에서, 차량 제어 유닛(200)은 세 개의 주요한 컴포넌트(component)를 포함한다. 첫 째, 작동 포지션 결정 컴포넌트(OPERATIONAL POSITION DETERMINATION COMPONENT)(220)는 가변 입력 제어로부터 신호(210)을 수신한다. 둘째, 파워 출력 결정 컴포넌트(POWER OUTPUT DETERMINATION COMPONENT)(230)는 각 전기 모터에 얼마나 많은 파워를 분배할 것인지에 대해 결정을 한다. 셋째, 파워 분배 컴포넌트(POWER DISTRIBUTION COMPONENT)(240)는 파워 신호를(250) 전기 모터에 전달하는 수단을 제공한다. 일부 실시 예에서, 전기 모터가 DC 전기 전압 대신에 AC 전기 전압을 요구하는 경우에는, 파워 신호(250)는 전지 모터들에 앞서 인버터에게 송신된다. 일부 실시 예에서, 파워 분배 컴포넌트(240)는 파워 신호(250)를 AC 전압형식으로 제공하여 인버터의 필요성을 제거한다. 일부 실시 예에서, 차량 배터리는 파워 분배 컴포넌트(240) 내부에 위치한다. 다른 실시 예에서, 배터리는 차량 제어 유닛(200) 외부에, 각 전기 모터들과 나란히, 또는 차량 내에 멀리 떨어진 곳에 위치할 수 있다.
일부 실시 예에서, 작동 포지션 결정 컴포넌트(220)는 가변 입력 제어로부터 전압에 대한 신호(210)를 무선 또는 유선으로 수신할 수 있다. 일부 실시 예에서, 신호(210)는 가변 입력 제어의 작동 포지션을 결정하기 위해 기준 신호와 비교될 수 있다. 예를 들어, 1 볼트(volt)의 기준 전압이 액셀러레이터 페달이 "100% 눌러진" 것에 대응한다고 가정하고, 신호(210)이 0.75 볼트로 수신되면, 작동 포지션 결정 컴포넌트(220)는 가변 입력 제어의 작동 포지션이 "75% 눌러졌다"고 결정할 수 있다. 다른 예로, 5 볼트의 기준 전압이 스티어링 휠이 오른쪽으로 180도 회전한 것에 대응한다고 가정하고, 신호(210)가 2.5 볼트로 수신되면, 작동 포지션 결정 컴포넌트(220)는 가변 입력 제어의 작동 포지션이 스티어링 휠이 오른쪽으로 90도 회전된 것이라고 결정할 수 있다. 신호(210)의 작동 포지션으로의 매핑(mapping)은 상기 예에서 볼 수 있는 바와 같은 선형(linear)일 필요가 없다는 것에 주의하여야 한다. 예를 들어, 1 볼트의 신호(210)는 브레이크 페달이 "10% 눌러진" 것에 대응할 수 있으며, 2 볼트의 신호(210)가 브레이크 페달이 "50% 눌러진" 것에 대응할 수 있다. 작동 포지션 결정 컴포넌트(220)는 매핑을 수행하기 위해 룩업 테이블을 사용할 수 있으며, 또는 공식 접근법을 이용할 수 있다. 예를 들어, 작동 포지션은 이하와 유사한 방정식을 이용하여 결정될 수 있다.
작동 포지션=2*(신호(210)-3볼트)2
일부 실시 예에서, 작동 포지션 결정 컴포넌트(220)는 신호의 크기만을 수신하는 것 대신에 희망하는 차량 속력 또는 희망하는 회전 각도를 가변 입력 제어로부터 수신할 수 있다. 예를 들어, 사용자는 키보드 또는 다른 인터페이스를 통해 희망하는 차량 속력이 30 mph라고 특정할 수있다. 일부 실시 예에서, 작동 포지션 결정 컴포넌트(220)는, 룩업 테이블을 사용하거나 공식 접근법을 이용하여 30 mph에 대응한다고 결정되는 신호(210)를 수신할 수 있다.
도 3은 드라이빙 시스템(300)의 예시적인 실시 예를 도시한다. 드라이빙 시스템(300)은 가변 입력 제어(305) 차량 제어 유닛(310), 전기 모터들(320), 차축들(330), 휠들(340) 및 인코더들(350)를 포함한다. 일부 실시 예에서, 인코더들(350)은 전기 모터들(320)의 기계적 출력을 기록하도록 전기 모터들(320)근처에 배치된다. 인코더들(350)은 전기 모터들(320) 내부나 전기 모터들(320) 표면 위나, 또는 차축들(330) 혹은 휠들(340)근처 다른 위치에, 센서로서 배치될 수 있다. 일부 실시 예에서, 인코더들(350)은 전기 모터들(320)의 회전 속도를 감지한다. 회전 속도는 또한 차축들(330) 또는 휠들(340)에서 감지될 수 있으며, 각속도가 회전 물체 반지름의 함수가 아니기 때문에, 어느 위치에서나 동일한 값을 가지게 된다. 일부 실시 예에서, 인코더들(350)은 휠들(340)의 접선 속도를 감지할 수 있다. 이는, 휠들 외부의 속력을 감지하거나 회전 속력을 감지하고 휠의 반지름을 이용하여 접선속도를 계산함으로써 이뤄질 수 있다. 인코더들(350)에 의해 수집된 정보는 무선 또는 유선으로 차량 제어 유닛(310)에 송신될 수 있다.
도 4는 차량 제어 유닛(400)의 예시적인 실시 예를 나타낸다. 차량 제어 유닛(400)은, 가변 입력 제어로부터 신호(410)를 수신하는 작동 포지션 결정 컴포넌트(420), 파워 출력 결정 컴포넌트(430) 및 파워 신호들(150)을 전기 모터들로 전달하는 수단을 제공하는 파워 분배 컴포넌트(440)를 포함한다. 일부 실시 예에서, 차량 제어 유닛(400)은, 전기 모터들의 기계적 출력을 감지하는 다양한 인코더들로부터 피드백 신호들(460)을 수신한다. 파워 출력 결정 컴포넌트(430)는, 특정 전기모터들이 예측하는 대로 수행하고 있지 않을 때 피드백 신호들(460)을 이용하여 에러를 수정할 수 있다.
또한, 피드백 신호들(460)은 파워 출력 결정 컴포넌트(430)로 하여금 희망하는 차량 스피드를 정확하게 유지할 수 있도록 한다. 예를 들어, 상술한 바와 같은 일부 실시 예에서, 가변 입력 제어는 차량 제어 유닛(400)에 원하는 차량 스피드, 예를 들어, 30 mph를 제공할 수 있다. 파워 출력 결정 컴포넌트(430)는, 첫 번째 반복(iteration)으로서, 전기 모터의 제조자로부터의 명세서를 사용하여 약 30 mph의 속력으로 차량을 구동하는 파워 레벨을 결정할 수 있다. 인코더들로부터의 피드백 신호들(460)은, 만약 원하는 차량 속력과 실제 차량 속력 사이의 차이, 즉, 에러가 존재한다면, 파워 출력 결정 컴포넌트(430)로 하여금 파워 신호들(450)을 조절할 수 있게 한다. 예를 들어, 피드백 신호들(460)이 실제 차량 속력이 희망 차량 속력보다 크다고 알려주면, 파워 출력 결정 컴포넌트(430)가 이에 따라 파워 신호들(450)을 감소시킨다. 이와 반대로, 피드백 신호들(460)이 실제 차량 속력이 희망 차량 속력보다 작다고 알려주면, 파워 출력 결정 컴포넌트(430)가 이에 따라 파워 신호들(450)을 감소시킨다.
차량 제어 유닛(400)이 수행하는 또 다른 예의 계산은, 차량의 회전 여부에 따라 상이한 전기 모터들에게 전달되는 전압 레벨을 변화시킨다. 급격한 우회전이 수행되고 있으면, 차량 제어 유닛(400)은 우측 휠들에 비해 좌측 휠들이 이동해야하는 늘어난 거리에 대해 보상을 하기 위해 우측 전기 모터들에게 전달되는 파워의 두 배를 좌측 전기 모터들에게 전달하도록 파워 신호들(450)을 수정할 수 있다. 차량 제어 유닛(400)이 수행하는 또 다른 예의 계산은, 사용자에 의해 브레이크 페달이 밟아질 때 전기 모터들에게 전달되는 파워/전압 레벨을 감소시키게 된다. 브레이크 페달이 얼만큼 밟혔는지에 따라, 차량이 제동 장치를 통하지 않는 대신에 전기 모터들에게 전달되는 파워 신호들(450)만 감소시키는 것이 더 효율적일 수 있다.
도 5는 본 개시의 예시적인 실시 예에 따른 4-모터 다이렉트 드라이빙 시스템의 탑 뷰(top view)를 도시한다. 일부 실시 예에서, 네 개의 전기 모터들은 차량 섀시 내부에 휠들로부터 떨어져서 설치된다. 전방-좌측 모터(512)는 차량의 전방 좌측 부분에 위치되고 전방-좌측 차축(514)를 통해 전방-좌측 휠(516)과 연결될 수 있다. 유사하게, 전방-우측 모터(522)는 차량의 전방 우측 부분에 위치되고 전방-우측 차축(524)를 통해 전방-우측 휠(526)과 연결될 수 있다. 전방-좌측 휠(514)와 전방-우측 휠(524)는 연결되어 있지 않고 서로 독립적이기 때문에, 이들을 구동하는 전기 모터들 역시 상이한 각속도에서 독립적으로 동작할 수 있다. 후방-좌측 모터(532) 및 후방-우측 모터(542) 역시 전방의 모터들과 유사하게 동작한다.
일부 실시 예에서, 인코더(518)는 전방-좌측 모터(512)에 연결될 수 있으며, 인코더(528)는 전방-우측 모터(522)에 연결될 수 있다. 인코더들(518)및(528)은, 기계적 출력을 전기 모터들의 전압 입력들을 제어하는 차량 제어 유닛(500)에 알려줄 수 있다. 앞서 논의된 바와 같이, 차량 제어 유닛(500)은 인코더들로부터의 정보에 기초하여 얼마만큼의 파워를 상이한 전기 모터들에게 전달할 것인지를 결정하며, 따라서 인코더들은 피드백 루프처럼 행동한다. 예를 들어, 차량이 평평하지 않은 표면을 달리고 있는 시나리오에서, 만약 차량 제어 유닛(500)이 10 볼트를 전방-좌측 모터(512) 및 전방-우측 모터(522) 모두에게 전달하고 인코더들(518)및(528)이 전방-우측 모터(522)이 전방-좌측 모터(512)보다 더 느리게 회전하고 있다고 알려주면, 차량 제어 유닛(500)은 이 차이를 보상하여 차량을 안정화하기 위해 전방-우측 모터(522)에 전달되는 전력을 증가시킬 수 있다.
일부 실시 예에서, 전력이 전기 모터들에게 전달되기 전에, 일련의 인버터들을 먼저 통과하게 된다. 인버터들을 일반적으로 DC 전기 신호를 AC 전기 신호로 변환한다. 사용되는 전기 모터들의 유형에 따라, 인버터들은 필수적일 수도 아닐수도 있다. 예를 들어, DC 브러쉬드(brushed)모터는 DC 전기로 기능할 수 있기 때문에 인버터가 작동하는 것을 요구하지 않는다. 반면에, 인덕션 모터는 AC 신호를 요구하기 대문에 인버터가 필요할 것이다. AC 및 DC 전기 모터들은, 그 디자인을 사용하고 있는 유형의 차량에 어떤 것이 더 적합할 것인지에 대한 결정에 영향을 주는 속력/토크(torque) 트레이드오프(tradeoff)를 가진다. 인버터들의 선택적인 본질(nature)은 도5 에서 파선으로 표시된다. 유사하게, 인버터(520)는 전압 신호를 수신하고 이를 전방-우측 모터(522)로 출력한다.
도 6은 후방-좌측 모터(632) 및 후방-우측 모터(642)가 차량의 섀시에 고정되어 있는 본 개시의 예시적인 실시 예 후면도(rear-view)이다. 이 실시 예에서, 후방 모터들은 후방-좌측 휠(636), 후방-좌측 차축(634), 후방-우측 차축(644), 후방-우측 휠(646)과 수평으로 위치한다.
도 7은 후방-좌측 모터(732)가 차량의 섀시에 고정되고, 등속 조인트(constant velocity joint)(733)는 후방-좌측 차축(734)이 적절하게 후방 우측 휠(736)을 회정하도록 위치된다. 도 7은 4-모터 다이렉트 드라이빙 시스템이 어떻게 현가장치(suspension system)와 함께 이용될 수 있는지 보여준다. 쇼크업소버(shock absorber)(737)는 한쪽이 차량의 섀시에 고정되고, 다른 한 쪽은 후방-좌측 차축(734)에 고정된다. 일부 실시 예에서, 등속 조인트는 전기 모터들이 회전력을 마찰 및 열로 인한 손실이 적게 휠들에 전달할 수 있게 한다. 이러한 방식으로, 전기 모터들은 차량의 섀시에 고정되면서도 스프링 하중량을 이루지 않게 된다.
도 8은 피벗(pivot) 시스템이 현가장치와 함께 사용되는 본 개시의 예시적인 실시 예 후면도를 보여준다. 후방-좌측 모터(832)는 후방-좌측 차축(834)과 후방-좌측 휠(836)과 연속적으로 연결되며, 후방-좌측 차축(834)은 쇼크업소버(837)와 고정되어 있으며 피벗(835)에서 회전할 수 있다. 이와 같은 시스템은 등속 조인트에서 기인하는 적은 마찰 손실로 모터들과 휠들 사이의 높은 파워 전달을 가능하게 한다. 피벗 시스템의 단점은 스프링 하중량의 증가와 디자인의 소형화의 감소이다.
도 9는 본 개시의 시일 실시 예 따른 드라이빙 시스템의 다양한 컴포넌트들의 시스템 다이어그램의 예시이다. 이 예시에서, 차량 제어 유닛(925)은 페달 포지션 센서(915)를 통해 액셀러레이터 페달(900)로부터, 페달 포지션 센서(920)를 통해 브레이크 페달(905)로부터, 스티어링 각도 센서(925)를 통해 스티어링 휠(910)로부터 신호들을 수신한다. 차량 제어 유닛(925)은, 전기 모터들(940)의 기계적 출력에 대한 정보를 주는 네 개의 인코더들(950)로부터 신호들을 수신한다. 차량 제어 유닛(925)은 센서들과 인코더들(950)로부터 얻어진 정보를 가공하여 얼마나 많은 전압이 네 개의 인버터들(930)에게 전달되어야 할지를 결정한다. 만약 DC모터가 사용된다면, 전압은 전기 모터들(940)로 전달된다. 네 개의 전기 모터들(940) 각각은 회전력을 휠들(970)에 연결된 차축들 각각(660)으로 전달한다.
도 10은 차량을 드라이빙하는 방법(1000)의 일 실시 예 도시한다. 방법(1000)은 이전에 기술된 어느 시스템 또는 구성요소를 이용하여서도 실행될 수 있다. 일부 실시 예서, 방법은 동작 1010에서 차량 제어 유닛이 가변 입력 제어와 N개의 인코더로부터 정보를 수신하는 것을 포함할 수 있다. 차량 제어 유닛은 가변 입력 제어와 N개의 인코더들로부터 모두 정보를 수신할 필요는 없다. 차량 제어 유닛은 가변 입력 제어로부터만, N개의 인코더들로부터만, 또는 N보다 작은 수의 인코더들로부터 정보를 수신할 수 있다. 방법은 동작 1030에서 차량 제어 유닛이 N개의 전압 출력들을 결정하고, 동작 1030에서 N개의 전압 출력들을 N개의 전기 모터들에게 분배하는 것을 포함할 수 있다. 방법은 또한 신호들을 N개의 전기 모터들로 전달하기 전에, 동작 1040에서 인버터들이 N개의 전압 출력들을 수정하는 선택적인 단계를 포함할 수 있다. 방법은 동작 1050에서 N개의 전기 모터들이 N개의 전압 출력들을 수신하고 회전력을 N개의 차축들, N개의 휠들에게 전달하는 것을 포함할 수 있다.
도 11은 컴퓨터 시스템(1100)의 일 실시 예 도시한다. 도 11에 도시된 컴퓨터 시스템(1100)은 휴대용 전자 장치, 모바일 폰, 또는 여기 설명된 다른 디바이스에 통합될 수 있다. 도 11은 다양한 실시 예들에 의하여 제공되는 방법들의 몇몇의 단계 혹은 모든 단계들을 수행할 수 있는 컴퓨터 시스템(1100)의 일 실시 예를 보여주는 도면이다. 주의하여 할 것은 도 11은 단지 다양한 구성요소들에 대한 일반화된 설명을 제공하는 것이며, 적당한 방법으로 다양하게 적용 및 응용 될 수 있다. 따라서, 도 11은 상대적으로 분리도어 있거나 혹은 상대적으로 좀더 집적된 방식으로 각 개별적인 시스템 구성요소들이 어떻게 동작하는 지를 다소 포괄적으로 보여둔다. 하드웨어 구성들은 하나 또는 그 이상의 프로세서들(1110)을 포함할 수 있으며, 프로세서들(1110)은 하나 도는 그 이상의 범용 프로세서들 및/또는 디지털 신초 처리 칩들, 그래픽 가속 프로세서들과 같은 하나 또는 그 이상의 특수 프로세서들(special-purpose processors)을 포함할 수 있다. 또한 하드웨어 구성들은 마우스, 키보드, 카메라 등과 같은 하나 또는 그 이상의 입력 장치들(1115), 디스플레이 장치, 프린터기 등과 같은 하나 또는 그 이상의 출력장치들을 포함할 수 있으나, 이에 한정되는 것은 아니다.
컴퓨터 시스템(1100)은 하나 또는 그 이상의 비-전이 장치들(1125)을 포함하거나 이들과 통신할 수 있으며, 비-전이 장치들(11125)은 로컬 및/또는 네트워크 접근 가능한 스토리지, 및/또는 디스크 드라이브, 드라이브 어레이, 옵티컬 스토리지 디바이스, RAM 및/또는 ROM과 같은 프로그램 가능하거나 플래시-업데이트 가능한(flash-updateable) SSD 등을 포함할 수 있으나 이에 한정되는 것은 아니다. 이러한 스토리지 장치들은 다양한 파일 시스템들, 데이터베이스 구조들 및/또는 이와 유사한 것들을 포함하여, 적당한 데이터 저장을 구현하도록 구성될 수 있다.
컴퓨터 시스템(1100)은 통신 서브시스템(1130)을 포함하며, 통신 서브시스템(1130)은 또한 모뎀, 네트워크 카드(무선 또는 유선), 적외선 통신 장치, 무선 통신 장치 및/또는 Bluetooth장치, 802.11 장치, WiFi 장치, WiMax 장치, 휴대전화 통신 위성 등과 같은 칩셋 등을 포함하나 이에 한정되는 것은 아니다. 통신 서브시스템(1130)은 데이터를 이하에서 설명될 바와 같은 네트워크, 다른 컴퓨터 시스템들, 텔레비전, 및/또는 여기서 설명된 다른 장치들과 같은 네트워크와 데이터를 교환하도록 하는 하나 또는 그 이상의 입력 및/또는 출력 통신 인터페이스를 포함한다. 요구되는 기능 및/또는 다른 구동 요구에 따라, 휴대 가능한 전자 제품 또는 이와 유사한 장치는 통신 서브시스템(1130)을 통하여 이미지 및/또는 다른 정보를 통신할 수 있다. 다른 실시 예에 있어서, 휴대 가능한 전자 제품, 예를 들어, 제 1 전자 장치는, 예를 들어 입력 장치(1115)와 같은 전자 장치와 같이 컴퓨터 시스템(1100)에 병합될 수 있다. 몇몇 실시 예들에 있어서, 컴퓨터 시스템(1100)은 앞서 설명된 바와 같이 RAM 또는 ROM을 포함하는 워킹 메모리(1135)를 더 포함할 것이다.
또한, 컴퓨터 시스템(1100)은, 워킹 메모리(1135) 내에 위치하는 것으로 보여지는, 소프트웨어 구성들을 포함할 수 있으며, 이는 동작 시스템(operating system)(1140), 장치 드라이버, 실행가능 라이브러리(executable libraries), 및/또는 하나 또는 그 이상의 어플리케이션 프로그램(1145)과 같은 다른 코드를 포함하며, 이러한 것들은 여기에서 설명된 다양한 실시 예들에 의하여 제공되는 컴퓨터 프로그램들을 포함하거나 또는 다른 실시 예들에 의하여 제공되는 방법 및/또는 특성 시스템들을 구현하도록 디자인될 수 있다. 예를 들어, 도 10과 관련되어 설명된 것과 같은 앞서 설명된 방법과 연관된 하나 또는 그 이상의 처리 절차는 컴퓨터 및/또는 컴퓨터 내의 프로세서에 의하여 실행 가능한 코드 및/또는 인스트럭션으로써 구현될 것이다. 이러한 코드 및/또는 인스트럭션은 앞서 설명된 방법에 따라 하나 또는 그 이상의 동작들을 수행하기 위하여 범용 프로세서 또는 다른 장치에 적용될 수 있도록 사용될 것이다.
이러한 인스트럭션들 및/또는 코드의 세트는 앞서 설명된 스토리지 장치(1125)와 같은 비-전이 컴퓨터-읽기 가능한 스토리지 매체에 저장될 것이다. 몇몇 예들에 있어서, 스토리지 매체는 컴퓨터 시스템(1100)과 같은 컴퓨터 시스템에 병합될 것이다. 다른 실시 예들에 있어서, 스토리지 매체는, 예를 들어 콤팩트 디스크 및/또는 설치 패키지(installation package)에 제공되는 제거 가능한 매체와 같이, 컴퓨터 시스템으로부터 분리될 것이며, 이에 따라 스토리지 매체는 이에 저장된 인스트럭션들/코드를 범용 컴퓨터에 프로그램, 구성(configure) 및/또는 적용할 수 있을 것이다. 이러한 인스트럭션들은 컴퓨터 시스템(1100)에 의하여 실행 가능한 코드의 유형을 가질 수 있으며 또는 컴퓨터 시스템(1100)에 의하여 컴파일(compilation) 및/또는 설치되는 소스 및/또는 설치 코드(source and/or installable code)의 유형, 예를 들어, 일반적으로 적용 가능한 컴파일러, 설치 프로그램, 압축/압축 해제 유틸리티 등을 가질 수 있으며, 이후 실행 가능한 코드의 유형을 취할 수 있다.
특정한 요청에 따라 상당한 변경이 가능함이 명백할 것이다. 예를 들어, 커스터마이즈드 하드웨어가 사용될 수 있으며, 또는 소정 구성들이 하드웨어, 소프트웨어(애플릿과 같은 휴대용 소프트웨어를 포함) 또는 이 모두에 구현될 수 있다. 더욱이, 네트워크 입력/출력 장치들과 같은 다른 컴퓨팅 장치와의 연결이 적용될 수도 있다.
앞서 설명된 바와 같이, 몇몇 실시 예들은 본 출원의 기술적 사상에 따른 방법을 수행하기 위하여 컴퓨터 시스템(1100)과 같은 컴퓨터 시스템을 사용할 것이다. 실시 예들에 따르면, 이러한 방법들의 일부 또는 전부의 처리 절차는 워킹 메모리(1135)에 포함된 하나 또는 그 이상의 인스트럭션들의 하나 또는 그 이상의 시퀀스들(예를 들어, 응용 프로그램(1145)과 같은 동작 시스템(1140) 및/또는 다른 코드에 병합될 수도 있음)을 실행하는 프로세서(1110)에 응답하여 컴퓨터 시스템(1100)에 의하여 수행될 것이다. 이러한 인스트럭션들은 하나 또는 그 이상의 저장 장치들(1125)과 같은 다른 컴퓨터 읽기 가능한 매체로부터 워킹 메모리(1135)로 독출될 것이다. 일 실시 예에 있어서, 워킹 메모리(1135)에 포함된 인스트럭션들의 시퀀스를 수행하는 것은 프로세서(들)(1110)로 하여금 앞서 설명된 하나 또는 그 이상의 방법들의 처리 절차를 수행하도록 하는 것을 야기할 것이다. 추가적으로 또는 대안적으로, 여기서 설명된 방법들의 부분들은 특수 하드웨어를 이용하여 수행될 것이다.
여기서 사용되는 "머신-읽기 가능한 매체(machine-readable medium)" 및 "컴퓨터 읽기 가능한 매체(computer-readable medium)"라는 용어는 머신이 특정 동작을 수행하도록 하는 데이터를 제공하는 것에 참여하는 비-전이 매체를 지칭할 것이다. 컴퓨터 시스템(1100)을 사용하여 구현되는 예에 있어서, 다양한 컴퓨터 읽기 가능한 매체가 실행을 위하여 프로세서(들)(1110)에 인스트럭션들/코드를 제공하는데 관련될 것이며, 또한 이러한 인스트럭션들/코드를 저장하거나 운반하는데 사용되는 것과 관련될 것이다. 많은 구현 예들에 있어서, 컴퓨터 읽기 가능한 매체는 물리적인 또는 유형(tangible)의 저장 매체일 것이다. 이러한 매체는 비휘발성 매체 또는 휘발성 매체의 형태를 가질 수 있다. 예를 들어, 비휘발성 매체는 저장 장치(들)(1125)과 같은 광학 및/또는 자기 디스크를 포함할 수 있다. 휘발성 매체는 워킹 메모리(1135)와 같은 다이내믹 메모리를 포함할 수 있으나, 이에 한정되는 것은 아니다.
물리적 및/또는 유형의 컴퓨터 읽기 가능한 매체의 예들은 플로피 디스크, 플렉서블 디스크, 하드 디스크, 자기 테이프 또는 다른 자기 매체, 콤팩트디스크, 광학 매체, ROM, RAM, 다른 메모리 칩 또는 카트리지, 또는 컴퓨터가 그로부터 인스트럭션들 및/또는 코드를 읽을 수 있는 모든 매체들을 포함할 것이다.
컴퓨터 읽기 가능한 매체의 다양한 형태는 실행을 위하여 하나 또는 그 이상의 인스트럭션들의 하나 또는 그 이상의 시퀀스를 프로세서(들)(1110)로 전송하는 것과 관련될 것이다. 예를 들어, 인스트럭션들은 초기에는 리모트 컴퓨터(remote computer)의 자기 디스크 및/또는 광학 디스크에 전송될 것이다. 리모트 컴퓨터는 인스트럭션들을 그것의 다이내믹 메모리로 로드하고, 컴퓨터 시스템(1100)에 의하여 수신 및/또는 실행되도록 인스트럭션들을 신호드로써 전송 매체를 통하여 전송할 것이다.
통신 서브시스템(1130)은 및/또는 구성들은 일반적으로 신호들을 수신하고, 이후 버스(1105)는 신호들 및/또는 신호에 의하여 워킹 메모리(1135)로 전송되는 데이터, 인스트럭션들 등을 전달하며, 이는 프로세서(들)(1110)에 의하여 회수되어 인스트럭션들을 실행한다. 워킹 메모리(1135)에 의하여 수신된 인스트럭션들은 프로세서(들)(1110)에 의하여 실행되기 전이나 또는 그 후에 비-전이 스토리지 장치(1125)에 선택적으로 저장된다.
앞서 설명된 방법, 시스템, 장치는 예시적인 것들이다. 다양한 구성들은 생략, 대체되거나, 또는 다양한 절차 또는 구성들이 적절하게 더하여 질 수 있다. 예를 들어, 대체적인 예에 있어서, 방법들은 앞서 설명된 것과 다른 순서로 수행될 수 있으며, 또는 다양한 단계들이 더하여지거나, 생략되거나 또는 결합될 수 있다. 또한, 소정 특성들과 관련되어 묘사된 특징들은 다른 특성들과 다양하게 결합될 수 있다. 구성들의 다른 측면들 및 특성들의 요소들은 유사한 방식으로 결합될 수 있다. 또한, 기술이 전진할 수 있으며, 따라서 많은 구성요소들은 예시적인 것이며, 본 출원의 기술적 사상을 한정하는 것은 아니다.
본 출원의 기술적 사상을 상세히 설명하기 위하여, 실시 예를 참조하여 설명하였다. 그러나, 이는 예시적인 것이며, 본 출원의 기술적 분야에서 통상의 지식을 가진 자는 본 출원의 기술적 사상의 기초하에 다양하게 적용 및 응용할 수 있다. 예를 들어, 잘 알려진 회로들, 프로세스들, 알고리즘들, 구조들 및 기술들이 구성의 모호함을 피하기 위하여 불필요한 구체적 부분 없이 도시 되었다. 이러한 묘사는 단지 예시적인 것이며, 본 발명의 기술적 사상을 제한하는 것은 아니다. 그 대신, 추가적인 구성들에 대한 설명이 본 발명의 기술분야에서 통상의 지식을 가진 자가 해당 설명을 가능하게 하여 설명된 기술들을 구현하기 위하여 제공될 것이다. 본 발명의 기술적 사상의 범주를 벗어나지 않는 범위 내에서 다양한 변형들이 기능적으로 그리고 구성요소들의 배치에 있어서 가능할 것이다.
또한, 순서도 또는 블록 다이어그램으로 설명된 프로세스로서 특성들이 설명되었다. 비록 순서 프로세스로써 각각이 동작들을 설명하고 있다고 하더라도, 많은 동작들이 병렬적으로 또는 동시에 수행될 수 있다. 이에 더하여, 동작들의 순서가 재조정될 수 있다. 프로세스는 도시되지 않은 추가적인 단계들을 가질 수 있다. 이에 더하여, 방법들의 실시 예들이 하드웨어, 소프트웨어, 펌웨어, 미들웨어, 마이크로코드, 하드웨어 설명 언어(hardware description languages) 또는 이들의 결합에 의하여 구현될 수 있다. 소프트웨어, 펌웨어, 미들웨어 또는 마이크로가 수행될 때에, 필요한 테스크들을 수행하기 위한 프로그램 코드 또는 코드 세그먼트들은 저장 매체와 같은 비-전이 컴퓨터-읽기가능한 매체에 저장될 것이다. 프로세서들은 이러한 설명된 테스크들을 수행할 것이다.
본 출원의 기술적 사상의 범주를 벗어나지 않고 다양한 실시 예들, 변형 예들, 변경 예들이 가능할 것이다. 예를 들어, 상기 구성요소들은 좀더 큰 시스템의 구성요소들일 수 있으며, 다른 규칙들이 우선권을 가지거나 또는 기술의 응용을 변형할 수 있다. 또한, 많은 단계들이 상기의 구성요소들이 고려되는 동안, 그 전 또는 그 후에 고려될 수 있다. 따라서, 상기의 설명들은 본 출원의 기술적 사상을 한정하지 않는다.
상세한 설명과 첨부된 청구범위에서 사용되는 단수형과 "상기"는 본 명세서가 다른 방식으로 명확하게 정의하고 있지 않은 한 복수의 레퍼런스(references)를 포함할 수 있다. 따라서, 예를 들어, "사용자"에 대한 언급은 그러한 복수의 사용자들을 포함할 수 있으며, "프로세서"에 대한 참조는 하나 이상의 프로세서들 및 당업자에게 알려진 그 등가물 등을 포함할 수 있다.
또한, 단어 "포함하고 있다", "포함하는", "함유하다", "함유하는","포함시키고 있다","포함시키는"이 명세서와 청구항들에서 사용될 때 언급된 구성들, 정수, 컴포넌트 또는 단계를 업급하기 위한 것이지, 하나 이상의 구성들, 정수, 컴포넌트, 단계들, 행동들, 그룹들의 존재 또는 추가를 배제시키지 않는다.
105, 305: 가변 입력 제어
110, 310: 차량 제어 유닛
120, 320: 전기모터
130, 330: 차축
140, 340: 휠
220, 420: 작동 포지션 결정 컴포넌트
230, 430: 파워 출력 결정 컴포넌트
240, 440: 파워 분배 컴포넌트
110, 310: 차량 제어 유닛
120, 320: 전기모터
130, 330: 차축
140, 340: 휠
220, 420: 작동 포지션 결정 컴포넌트
230, 430: 파워 출력 결정 컴포넌트
240, 440: 파워 분배 컴포넌트
Claims (20)
- 차량 드라이빙 시스템으로서,
두 개 이상의 전기 모터들 -상기 두 개 이상의 전기 모터들 각각은 전압 입력을 가짐 -;
가변 입력 제어의 작동 포지션을 나타내는 신호를 제공하도록 구성된 상기 가변 입력 제어;
두 개 이상의 휠들(wheels) -상기 두 개 이상의 휠들 각각은 차축에 의해 상기 두 개 이상의 전기 모터들 중 하나에 연결됨 -; 및
상기 두 개 이상의 전기 모터들의 전압 입력들을 제어하도록 구성된 차량 제어 유닛을 포함하며,
상기 차량 제어 유닛은,
상기 가변 입력 제어의 작동 포지션을 나타내는 정보를 수신하고;
수신된 상기 정보에 기초하여 상기 두 개 이상의 전기 모터들에 대한 전압 입력들을 결정하며;
상기 전압 입력들을 상기 두개 이상의 전기 모터들로 달성시키는(effectuate) 명령들을 생성하는, 상기 차량 드라이빙 시스템. - 제1항에 있어서,
전력을 인버팅(invert)하는 두개 이상의 전력 인버팅 디바이스들을 더 포함하며,
상기 두개 이상의 전력 인버팅 디바이스들 각각은 상기 차량 제어 유닛으로부터 입력을 수신하고 상기 두개 이상의 전기 모터들로 전압을 출력시키는, 상기 차량 드라이빙 시스템. - 제2항에 있어서,
두개 이상의 인코더들을 더 포함하며,
상기 두개 이상의 인코더들 각각은 상기 두개 이상의 전기 모터들 중 하나로부터 기계적 출력을 기록하도록 구성되는, 상기 차량 드라이빙 시스템. - 제3항에 있어서,
상기 두개 이상의 인코더들은 상기 차량 제어 유닛에 피드백되는 출력을 포함하는, 상기 차량 드라이빙 시스템. - 제4항에 있어서,
네 개의 전기 모터들, 네 개의 휠들, 네 개의 전력 인버팅 디바이스들 및 네 개의 인코더들이 존재하는, 상기 차량 드라이빙 시스템. - 제5항에 있어서,
액셀러레이터 페달;
브레이크 페달; 및
스티어링 휠을 더 포함하는, 상기 차량 드라이빙 시스템. - 제6항에 있어서,
상기 가변 입력 제어는, 상기 액셀러레이터 페달, 상기 브레이크 페달 및 상기 스티어링 휠 중 하나 이상인, 상기 차량 드라이빙 시스템. - 제7항에 있어서,
상기 차량 제어 유닛은, 상기 액셀러레이터 페달, 상기 브레이크 페달, 상기 스티어링 휠 및 상기 네 개의 인코더들로부터 수신된 신호에 기초하여 상기 네 개의 전기 모터들의 전압 입력들을 제어하도록 더 구성되는, 상기 차량 드라이빙 시스템. - 제7항에 있어서,
상기 네 개의 인코더들에 의해 기록된 상기 네 개의 전기 모터들로부터의 상기 기계적 출력은 각 모터의 회전 속력인, 상기 차량 드라이빙 시스템. - 제7항에 있어서,
상기 네 개의 인코더들에 의해 기록된 상기 네 개의 전기 모터들로부터의 상기 기계적 출력은 각 모터의 접선 속도인, 상기 차량 드라이빙 시스템. - 제1항에 있어서,
상기 두 개 이상의 휠들 각각은, 트랜스미션 기어(transmission gear)의 사용 없이 상기 두 개 이상의 전기 모터들 중 하나에 연결되는, 상기 차량 드라이빙 시스템. - 제1항에 있어서,
상기 차량 제어 유닛은, 차량의 회전을 가능하게 하기 위해 균등하지 않은 전압 출력들을 상기 두 개 이상의 전기 모터들에 달성시키는 명령들을 생성하도록 구성되는, 상기 차량 드라이빙 시스템. - 제1항에 있어서,
상기 두 개 이상의 전기 모터들은, 좌측-후방 휠에 연결되는 죄측-후방 모터 및 우측-후방 휠에 연결되는 우측-후방 모터를 포함하며,
좌측-후방 모터와 우측-후방 모터는 상기 차량 드라이빙 시스템의 하부에 배치되록 배열되는, 상기 차량 드라이빙 시스템. - 제1항에 있어서,
상기 두 개 이상의 전기 모터들은, 상기 두 개 이상의 휠들 각각으로부터 분리되고 구별되는, 상기 차량 드라이빙 시스템. - 차량 드라이빙 시스템으로서,
액셀러레이터 페달;
브레이크 페달;
스티어링 휠;
두 개 이상의 전기 모터들 -상기 두 개 이상의 전기 모터들 각각은 전압 입력을 가짐 -;
가변 입력 제어의 작동 포지션을 나타내는 신호를 제공하도록 구성된 상기 가변 입력 제어;
두 개 이상의 휠들 -상기 두 개 이상의 휠들 각각은 차축에 의해 상기 두 개 이상의 전기 모터들 중 하나에 연결됨 -;
상기 두 개 이상의 전기 모터들의 전압 입력들을 제어하도록 구성된 차량 제어 유닛 -상기 차량 제어 유닛은, 상기 가변 입력 제어의 작동 포지션을 나타내는 정보를 수신하고; 수신된 상기 정보에 기초하여 상기 두 개 이상의 전기 모터들에 대한 전압 입력들을 결정하며; 상기 전압 입력들을 상기 두개 이상의 전기 모터들로 달성시키는(effectuate) 명령들을 생성함-;
전력을 인버팅하는 두개 이상의 전력 인버팅 디바이스들 -상기 두개 이상의 전력 인버팅 디바이스들 각각은 상기 차량 제어 유닛으로부터 입력을 수신하고 상기 두개 이상의 전기 모터들로 전압을 출력시킴-; 및
두개 이상의 인코더들 -상기 두개 이상의 인코더들 각각은 상기 두개 이상의 전기 모터들 중 하나로부터 기계적 출력을 기록하도록 구성됨-;
을 포함하며;
상기 차량 제어 유닛은, 상기 액셀러레이터 페달, 상기 브레이크 페달, 상기 스티어링 휠 및 상기 두 개 이상의 인코더들로부터 수신된 신호에 기초하여 상기 두 개 이상의 전기 모터들의 전압 입력들을 제어하도록 더 구성되며;
상기 두 개 이상의 인코더들에 의해 기록된 상기 네 개의 전기 모터들로부터의 상기 기계적 출력은 각 모터의 회전 속력이며;
상기 두 개 이상의 전기 모터들은, 상기 두 개 이상의 휠들 각각으로부터 분리되고 구별되는, 상기 차량 드라이빙 시스템. - 차량 드라이빙 방법으로서,
차량 제어 유닛에서, 가변 입력 제어로부터 신호를 수신받는 단계 -상기 가변 입력 제어로부터의 신호는 상기 가변 입력 제어의 작동 포지션에 대응함-;
상기 차량 제어유닛에서, 상기 가변 입력 제어로부터 수신된 정보에 기초하여 제1 전압 출력 및 제2 전압 출력을 결정하는 단계;
상기 차량 제어 유닛에서, 상기 제1 전압 출력을 제1 전기 모터의 입력단 쪽으로 출력하는 단계; 및
상기 차랑 제어 유닛에서, 상기 제2 전압 출력을 제2 전기 모터의 입력단 쪽으로 출력하는 단계를 포함하며,
상기 제1 전기 모터와 상기 제2 전기 모터 각각은 제1 차축과 제2 차축에 의해 제1 휠과 제2 휠에 연결되는, 상기 차량 드라이빙 방법. - 제16항에 있어서,
상기 제1 전압 출력을 상기 제1 모터의 입력단에 앞서 제1 전력 인버팅 디바이스에 전달하는 단계; 및
상기 제2 전압 출력을 상기 제2 모터의 입력단에 앞서 제2 전력 인버팅 디바이스에 전달하는 단계를 더 포함하는, 상기 차량 드라이빙 방법. - 제17항에 있어서,
상기 차량 제어 유닛에서, 제1 인코더로부터 신호를 수신하는 단계;
상기 차량 제어 유닛에서, 제2 인코더로부터 신호를 수신하는 단계를 더 포함하며,
상기 제1 인코더 및 제2 인코더로부터의 신호들은 상기 제1 전기 모터 및 상기 제2 전기 모터로부터의 기계적 출력을 나타내는, 상기 차량 드라이빙 방법. - 제18항에 있어서,
상기 가변 입력 제어는, 상기 액셀러레이터 페달, 상기 브레이크 페달 및 상기 스티어링 휠 중 하나 이상인, 상기 차량 드라이빙 방법. - 제18항에 있어서,
상기 차량 제어유닛에서 상기 제1 전압 출력 및 상기 제2 전압 출력을 결정하는 단계는 상기 가변 입력 제어로부터 수신된 정보 및 상기 제1 인코더 및 제2 인코더로부터 수신된 정보에 기초하는, 상기 차량 드라이빙 방법.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/923,432 US9809129B2 (en) | 2015-10-27 | 2015-10-27 | Four motor direct driving system |
| US14/923,432 | 2015-10-27 | ||
| US14/967,394 US10023073B2 (en) | 2015-10-27 | 2015-12-14 | Four motor direct driving system |
| US14/967,394 | 2015-12-14 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170049450A true KR20170049450A (ko) | 2017-05-10 |
Family
ID=57136711
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160141446A Withdrawn KR20170049450A (ko) | 2015-10-27 | 2016-10-27 | 4-모터 다이렉트 드라이빙 시스템 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10023073B2 (ko) |
| EP (1) | EP3162611B1 (ko) |
| KR (1) | KR20170049450A (ko) |
| CN (2) | CN207825907U (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102435652B1 (ko) * | 2021-04-07 | 2022-08-25 | 주식회사 만도 | 브레이크 장치 |
| CN115195686A (zh) * | 2021-04-07 | 2022-10-18 | 株式会社万都 | 制动装置 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170072935A (ko) * | 2014-12-16 | 2017-06-27 | 비와이디 컴퍼니 리미티드 | 전기 자동차, 전기 자동차의 능동적 안전 제어 시스템, 전기 자동차의 능동적 안전 제어 시스템을 위한 제어 방법 및 모터 제어기 |
| US9809129B2 (en) | 2015-10-27 | 2017-11-07 | Thunder Power New Energy Vehicle Development Company Limited | Four motor direct driving system |
| CN108215941B (zh) * | 2018-02-02 | 2024-01-30 | 浙江中车电车有限公司 | 一种纯电城市客车轮毂驱动控制方法及系统 |
| RU2707429C1 (ru) * | 2019-02-13 | 2019-11-26 | Вальдемар Олегович Вагнер | Система управления полноприводным электромобилем |
| CN112356685B (zh) * | 2020-11-25 | 2022-11-25 | 重庆大学 | 一种前后独立驱动四驱电动汽车的转矩分配及驱动防滑协调控制方法 |
| US12097772B2 (en) * | 2021-07-15 | 2024-09-24 | Rivian Ip Holdings, Llc | Systems and methods for controlling speed differential of wheels of a vehicle |
| JP7601028B2 (ja) * | 2022-02-25 | 2024-12-17 | トヨタ自動車株式会社 | 車両 |
| GB202208896D0 (en) * | 2022-06-16 | 2022-08-10 | Muev Ltd | Vehicle control system |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5465806A (en) * | 1989-03-31 | 1995-11-14 | Kabushiki Kaisha Shikoku Sogo Kenkyujo | Electric vehicle |
| JP3280392B2 (ja) * | 1991-04-01 | 2002-05-13 | アイシン・エィ・ダブリュ株式会社 | 電動車両の駆動力制御装置 |
| JPH05268706A (ja) * | 1992-03-19 | 1993-10-15 | Aqueous Res:Kk | 電気自動車 |
| FR2705286B1 (fr) | 1993-05-18 | 1995-09-08 | Smh Management Services Ag | Véhicule comprenant un système de freinage électrique et mécanique. |
| US5472059A (en) * | 1994-02-15 | 1995-12-05 | Dana Corporation | Wheel end assembly |
| DE4421428C1 (de) * | 1994-06-18 | 1995-07-27 | Fichtel & Sachs Ag | Mit einem Elektromotor zu einer Baueinheit verbindbares Planetengetriebe |
| JP3861321B2 (ja) | 1996-05-02 | 2006-12-20 | トヨタ自動車株式会社 | ハイブリッド車 |
| US5758014A (en) * | 1996-08-05 | 1998-05-26 | Delco Electronics Corp. | Electric vehicle traction control system and method |
| DE19732637C5 (de) * | 1997-07-29 | 2006-09-14 | Daimlerchrysler Ag | Elektrischer Antrieb für eine Radnabe |
| US7163480B2 (en) | 2001-05-03 | 2007-01-16 | Ford Global Technologies, Llc | Powertrain for a hybrid vehicle with all-wheel drive capability and method for controlling wheel slip |
| JP3589208B2 (ja) * | 2001-08-13 | 2004-11-17 | 日産自動車株式会社 | ハイブリッド車両の駆動装置 |
| EP1470013B1 (de) * | 2002-01-31 | 2005-06-29 | Ewald Speth Antriebstechnik GmbH | Direkt angetriebene antriebsachse mit zwei antriebsmotoren |
| US6909959B2 (en) | 2003-03-07 | 2005-06-21 | Stephen James Hallowell | Torque distribution systems and methods for wheeled vehicles |
| JP2004345592A (ja) * | 2003-05-26 | 2004-12-09 | Nissan Motor Co Ltd | 車両の操舵装置 |
| WO2006020587A2 (en) | 2004-08-09 | 2006-02-23 | Railpower Technologies Corp. | Regenerative braking methods for a hybrid locomotive |
| US7451034B2 (en) | 2006-03-10 | 2008-11-11 | Ford Global Technologies, Llc | Traction control using dynamic tire friction potential |
| US20120159916A1 (en) * | 2007-01-15 | 2012-06-28 | Kanzaki Kokyukoki Manufacturing Co., Ltd. | Control sysytem for motor-driven lawnmower vehicle |
| JP2008195233A (ja) * | 2007-02-13 | 2008-08-28 | Mazda Motor Corp | インホイールモータを搭載する車両 |
| US8843233B2 (en) * | 2007-03-20 | 2014-09-23 | Donald L. Dollens | Intelligent drive control system |
| US20090107749A1 (en) * | 2007-10-30 | 2009-04-30 | Textron Inc. | Closed Loop Traction System for Light-Weight Utility Vehicles |
| CN201120855Y (zh) * | 2007-11-23 | 2008-09-24 | 谈建国 | 一种电动汽车四轮驱动的控制装置 |
| JP5401682B2 (ja) * | 2008-04-18 | 2014-01-29 | 株式会社 神崎高級工機製作所 | 電動対地作業車両 |
| US7739005B1 (en) * | 2009-02-26 | 2010-06-15 | Tesla Motors, Inc. | Control system for an all-wheel drive electric vehicle |
| US8453770B2 (en) | 2009-01-29 | 2013-06-04 | Tesla Motors, Inc. | Dual motor drive and control system for an electric vehicle |
| WO2011002342A1 (ru) | 2009-07-03 | 2011-01-06 | Закрытое Акционерное Общество Научно-Производственное Предприятие "Инкар-М" | Электротранспортное средство |
| CN102510815A (zh) * | 2009-07-03 | 2012-06-20 | Inkar-M科研生产企业股份有限公司 | 电动车辆 |
| US8521349B2 (en) * | 2010-06-10 | 2013-08-27 | Ford Global Technologies | Vehicle steerability and stability control via independent wheel torque control |
| JP5400716B2 (ja) * | 2010-06-30 | 2014-01-29 | 日立建機株式会社 | 電動車両の駆動力制御装置 |
| JP5784930B2 (ja) * | 2011-03-07 | 2015-09-24 | Ntn株式会社 | 電気自動車 |
| JP5562276B2 (ja) * | 2011-03-07 | 2014-07-30 | Ntn株式会社 | 電気自動車 |
| US8648559B2 (en) * | 2011-03-16 | 2014-02-11 | Deere & Company | System for controlling rotary electric machines to reduce current ripple on a direct current bus |
| EP2700532A4 (en) * | 2011-04-21 | 2016-01-27 | Pioneer Corp | TORQUE DISTRIBUTION DEVICE, TORQUE DISTRIBUTION METHOD, VALVE GENERATION PROCEDURE FOR TORQUE DISTRIBUTION AND PROGRAM |
| CN102303545B (zh) * | 2011-06-24 | 2014-01-08 | 沈阳工业大学 | 电动汽车双轮双馈驱动系统及驱动方法 |
| KR101360038B1 (ko) | 2011-07-28 | 2014-02-07 | 현대자동차주식회사 | 인휠 모터를 이용한 차량 제어 방법 |
| EP2556990B1 (en) * | 2011-08-08 | 2019-06-05 | Tata Technologies Pte Ltd | A wheel drive architecture for electric vehicles |
| WO2013037034A1 (en) * | 2011-09-14 | 2013-03-21 | Trusted Positioning Inc. | Method and apparatus for navigation with nonlinear models |
| JP5792015B2 (ja) * | 2011-09-27 | 2015-10-07 | Ntn株式会社 | インホイールモータ駆動装置 |
| JP5325963B2 (ja) * | 2011-10-24 | 2013-10-23 | 本田技研工業株式会社 | 逐次インピーダンス計測方法、計測装置および燃料電池システム |
| US8965609B2 (en) * | 2011-12-29 | 2015-02-24 | Kawasaki Jukogyo Kabushiki Kaisha | Electric vehicle |
| JP5851861B2 (ja) * | 2012-01-30 | 2016-02-03 | Ntn株式会社 | 電気自動車 |
| US9221359B2 (en) * | 2012-03-12 | 2015-12-29 | Nissan Motor Co., Ltd. | Electric vehicle driving force control device and electric vehicle driving force control method |
| US8960341B2 (en) * | 2012-12-27 | 2015-02-24 | Magna E-Car Systems Of America, Inc. | Continuously variable electric drive module for electric vehicles |
| US9199526B2 (en) * | 2013-02-26 | 2015-12-01 | Jtekt Corporation | Vehicle and vehicle driving device |
| JP6503760B2 (ja) * | 2014-06-04 | 2019-04-24 | 三菱自動車工業株式会社 | 電動車両の駆動力制御装置 |
| CN104960435A (zh) * | 2015-05-25 | 2015-10-07 | 陆杰 | 车辆驱动/制动一体系统 |
| US9809129B2 (en) | 2015-10-27 | 2017-11-07 | Thunder Power New Energy Vehicle Development Company Limited | Four motor direct driving system |
-
2015
- 2015-12-14 US US14/967,394 patent/US10023073B2/en active Active
-
2016
- 2016-10-12 EP EP16193478.1A patent/EP3162611B1/en not_active Not-in-force
- 2016-10-25 CN CN201621162050.0U patent/CN207825907U/zh not_active Expired - Fee Related
- 2016-10-25 CN CN201610939184.7A patent/CN106965658A/zh active Pending
- 2016-10-27 KR KR1020160141446A patent/KR20170049450A/ko not_active Withdrawn
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102435652B1 (ko) * | 2021-04-07 | 2022-08-25 | 주식회사 만도 | 브레이크 장치 |
| CN115195686A (zh) * | 2021-04-07 | 2022-10-18 | 株式会社万都 | 制动装置 |
| US12420760B2 (en) | 2021-04-07 | 2025-09-23 | Hl Mando Corporation | Brake apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3162611B1 (en) | 2019-08-07 |
| EP3162611A1 (en) | 2017-05-03 |
| CN106965658A (zh) | 2017-07-21 |
| CN207825907U (zh) | 2018-09-07 |
| US10023073B2 (en) | 2018-07-17 |
| US20170113572A1 (en) | 2017-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170049450A (ko) | 4-모터 다이렉트 드라이빙 시스템 | |
| US10266068B2 (en) | Four motor direct driving system | |
| CN110893857A (zh) | 用于操作车辆的方法和系统 | |
| WO2012052831A1 (en) | Vehicle braking/driving force control system and vehicle braking/driving force control method | |
| CN116142286A (zh) | 用于车辆的转向模块装置 | |
| CN107921959A (zh) | 车辆的转弯控制装置 | |
| KR20130047309A (ko) | 인휠 시스템을 이용한 차량 제어 방법 | |
| WO2012111160A1 (ja) | トルク配分装置、トルク配分方法、トルク配分値生成方法およびプログラム | |
| EP4347302B1 (en) | Energy efficient propulsion based on wheel slip balanced drive | |
| JP2013126821A (ja) | 車両挙動制御装置 | |
| JP6506196B2 (ja) | 車輪制御装置 | |
| CN116238587A (zh) | 用于车辆的转角模块装置 | |
| CN116141951A (zh) | 用于车辆的转角模块装置 | |
| JP2012240444A (ja) | 車両 | |
| JP2012171616A (ja) | トルク配分装置およびトルク配分方法 | |
| JP6079356B2 (ja) | 各輪独立駆動台車の制御装置 | |
| JP2023540180A (ja) | 車両装置の操舵を制御する方法 | |
| JP5096623B2 (ja) | トルク配分装置およびトルク配分方法 | |
| JP2011161957A (ja) | 中央制御装置 | |
| JP5104102B2 (ja) | 車両の駆動力配分制御装置 | |
| HK1237309A1 (en) | Four motor direct driving system | |
| HK1241325A1 (en) | Four motor direct driving system | |
| CN110696794B (zh) | 用于产生影响汽车车轮滑转调节的指令信号的设备和方法 | |
| KR102020566B1 (ko) | 이륜 또는 삼륜 차량용 전기 에너지 제어 장치 및 방법 | |
| JP2015116069A (ja) | 左右輪独立モータ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20161027 |
|
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
Patent event date: 20170228 Comment text: Notification of Change of Applicant Patent event code: PN23011R01D |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination | ||
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |