KR20190008902A - 툴 교환 장치 - Google Patents
툴 교환 장치 Download PDFInfo
- Publication number
- KR20190008902A KR20190008902A KR1020187036365A KR20187036365A KR20190008902A KR 20190008902 A KR20190008902 A KR 20190008902A KR 1020187036365 A KR1020187036365 A KR 1020187036365A KR 20187036365 A KR20187036365 A KR 20187036365A KR 20190008902 A KR20190008902 A KR 20190008902A
- Authority
- KR
- South Korea
- Prior art keywords
- tool
- plate
- cylinder chamber
- pressure
- tubular portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 230000033001 locomotion Effects 0.000 claims description 15
- 238000000034 method Methods 0.000 claims description 14
- 239000012530 fluid Substances 0.000 claims description 10
- 230000008569 process Effects 0.000 claims description 7
- 238000001514 detection method Methods 0.000 description 3
- 238000003780 insertion Methods 0.000 description 3
- 230000037431 insertion Effects 0.000 description 3
- 238000003825 pressing Methods 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000000256 polyoxyethylene sorbitan monolaurate Substances 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0408—Connections means
- B25J15/0416—Connections means having balls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0466—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof with means for checking exchange completion
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Automatic Tool Replacement In Machine Tools (AREA)
Abstract
Description
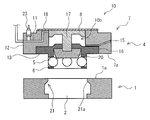
도 2 는 도 1 의 툴 교환 장치의 툴 플레이트의 연결 직전의 상태의 개략적 단면 측면도이다.
도 3 은 도 1 의 툴 교환 장치의 툴 플레이트의 연결 상태의 개략적 단면 측면도이다.
도 4 는 도 1 의 툴 교환 장치의 동작을 설명하기 위한 전체 구성도이다.
1a : 맞닿음면
2 : 끼워넣기 오목부
4 : 마스터 플레이트
5 : 볼
6 : 통형상부
7 : 플레이트 본체
7a : 맞닿음면
8 : 피스톤 부재
10 : 실린더실
10a : 상부 실린더실
10b : 하부 실린더실
11 : 유통로
12 : 제 1 통형상체
13 : 제 2 통형상체
14 : 전자 밸브
15 : 제 2 유통로
16 : 차양부
17 : 로드
18 : 플레이트
20 : 캠부
21 : 피걸림부
21a : 천면
23 : 압력 검지 부재
25 : 제어부
Claims (5)
- 상면에 끼워넣기 오목부를 갖는 툴 플레이트와, 연결 상태에서 상기 상면에 접하는 일면과 상기 끼워넣기 오목부에 끼워넣기 가능한 통형상부를 가짐과 함께 상기 툴 플레이트를 착탈 가능하게 연결하는 마스터 플레이트를 구비하고,
상기 마스터 플레이트가,
상기 통형상부를 가짐과 함께, 내부에 실린더실 및 이 실린더실에 유체를 공급하는 유통로가 형성된 플레이트 본체와,
상기 통형상부에 유지되고, 통형상부의 측면으로부터 출퇴 가능하게 형성되는 적어도 하나의 걸림부와,
상기 실린더실의 압력에 의해 상기 일면과 대략 수직 방향으로 상기 통형상부 내를 왕복동 가능하게 상기 플레이트 본체에 장착됨과 함께 왕복동에 의해 상기 걸림부의 출퇴를 실시하는 피스톤 부재를 갖고,
상기 툴 플레이트가, 상기 끼워넣기 오목부에 상기 통형상부를 끼워넣은 상태로 상기 걸림부가 출퇴함으로써 걸림부와 걸리거나 이탈되는 피걸림부를 갖는 툴 교환 장치로서,
상기 마스터 플레이트가, 상기 실린더실의 압력을 검지하는 검지 수단을 추가로 갖는 것을 특징으로 하는 툴 교환 장치. - 제 1 항에 있어서,
상기 검지 수단이, 상기 유통로에 연결되어 있음으로써, 상기 실린더실의 압력을 검지하는, 툴 교환 장치. - 제 1 항 또는 제 2 항에 있어서,
상기 검지 수단은, 상기 플레이트 본체에 부속 설치되어 있는 압력 검지 부재인, 툴 교환 장치. - 제 1 항, 제 2 항 또는 제 3 항에 있어서,
상기 걸림부가, 상기 피스톤 부재의 왕복동에 의해 상기 통형상부의 측면으로부터 출퇴 가능하게 유지되는 복수의 볼로 구성되고, 상기 피걸림부가, 상기 통형상부를 끼워넣기 오목부에 끼워넣은 상태로 진출한 상기 볼에 의해 걸리는, 툴 교환 장치. - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
적어도 상기 실린더실에 대한 유체의 공급을 제어하는 제어부를 추가로 구비하고, 상기 검지 수단은, 검지한 압력 정보를 상기 제어부에 송신하여, 송신된 상기 압력 정보가 소정의 압력 이하였을 경우에 상기 제어부는, 소정의 처리를 실시하는, 툴 교환 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016114867 | 2016-06-08 | ||
| JPJP-P-2016-114867 | 2016-06-08 | ||
| PCT/JP2017/015477 WO2017212790A1 (ja) | 2016-06-08 | 2017-04-17 | ツール交換装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20190008902A true KR20190008902A (ko) | 2019-01-25 |
Family
ID=60578564
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020187036365A Ceased KR20190008902A (ko) | 2016-06-08 | 2017-04-17 | 툴 교환 장치 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JPWO2017212790A1 (ko) |
| KR (1) | KR20190008902A (ko) |
| CN (1) | CN109311172A (ko) |
| WO (1) | WO2017212790A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114248290A (zh) * | 2020-09-22 | 2022-03-29 | 奥腾工业自动化(廊坊)有限公司 | 具有增加扭转刚度的机器人工具更换器耦合机构 |
| US11850733B2 (en) | 2020-06-11 | 2023-12-26 | Ati Industrial Automation, Inc. | Robotic tool changer coupling mechanism with increased torsional rigidity and reduced freeplay |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IT201800006402A1 (it) * | 2018-06-18 | 2019-12-18 | Dispositivo di cambio utensile per un braccio robotico | |
| WO2022259470A1 (ja) * | 2021-06-10 | 2022-12-15 | ビー・エル・オートテック株式会社 | ツール交換装置 |
| JP7306589B1 (ja) * | 2021-10-26 | 2023-07-11 | ビー・エル・オートテック株式会社 | ツール交換装置 |
| CN114434494B (zh) * | 2021-12-21 | 2024-05-24 | 北京未末卓然科技有限公司 | 一种带有加热保温内胆的机器人 |
| CN115027771B (zh) * | 2022-06-22 | 2023-06-02 | 江南大学 | 机器人末端执行器快换联结器、开箱和取货系统及其方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015000449A (ja) | 2013-06-14 | 2015-01-05 | ビー・エル・オートテック株式会社 | 工具交換装置用のマスター装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60123287A (ja) * | 1983-08-22 | 1985-07-01 | 三菱電機株式会社 | 産業用ロボツトのハンド装置 |
| JPS629887A (ja) * | 1985-07-08 | 1987-01-17 | フアナツク株式会社 | 自動ハンド交換装置 |
| JPH02300501A (ja) * | 1989-05-16 | 1990-12-12 | Matsushita Electric Ind Co Ltd | 空気圧駆動装置 |
| JPH04300187A (ja) * | 1991-03-28 | 1992-10-23 | Koganei:Kk | 自動着脱装置 |
| JP4186146B2 (ja) * | 1999-10-18 | 2008-11-26 | Smc株式会社 | ロボットハンド用ツール取付装置 |
| WO2004113031A1 (ja) * | 2004-05-18 | 2004-12-29 | Bl Autotec, Ltd. | ロボットアームカップリング装置用マスタプレート及びツールプレート、ロボットアームカップリング装置 |
| JP6496495B2 (ja) * | 2014-06-11 | 2019-04-03 | ニッタ株式会社 | 自動工具交換装置 |
-
2017
- 2017-04-17 KR KR1020187036365A patent/KR20190008902A/ko not_active Ceased
- 2017-04-17 CN CN201780034994.0A patent/CN109311172A/zh not_active Withdrawn
- 2017-04-17 JP JP2018522358A patent/JPWO2017212790A1/ja active Pending
- 2017-04-17 WO PCT/JP2017/015477 patent/WO2017212790A1/ja not_active Ceased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015000449A (ja) | 2013-06-14 | 2015-01-05 | ビー・エル・オートテック株式会社 | 工具交換装置用のマスター装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11850733B2 (en) | 2020-06-11 | 2023-12-26 | Ati Industrial Automation, Inc. | Robotic tool changer coupling mechanism with increased torsional rigidity and reduced freeplay |
| CN114248290A (zh) * | 2020-09-22 | 2022-03-29 | 奥腾工业自动化(廊坊)有限公司 | 具有增加扭转刚度的机器人工具更换器耦合机构 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109311172A (zh) | 2019-02-05 |
| WO2017212790A1 (ja) | 2017-12-14 |
| JPWO2017212790A1 (ja) | 2019-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20190008902A (ko) | 툴 교환 장치 | |
| US12134157B2 (en) | Clamping apparatus | |
| JP2022179629A (ja) | ツール交換装置 | |
| JP2010036314A (ja) | クランプ装置 | |
| EP2676766B1 (en) | Positioning device | |
| WO2020166428A1 (ja) | 工具交換装置 | |
| EP3312120B1 (en) | Spun yarn take-up system and yarn threading robot | |
| CN102256741A (zh) | 带液力耦合器的紧固系统 | |
| KR20130040515A (ko) | 오링 삽입장치 | |
| JP6144523B2 (ja) | 位置決め装置 | |
| JP5734173B2 (ja) | クランプ装置 | |
| EP3603905A1 (en) | Gripping device | |
| US20220362895A1 (en) | Connecting device | |
| JP6222688B2 (ja) | 位置決め装置 | |
| JP6755441B2 (ja) | ツール交換装置 | |
| JP5430710B2 (ja) | クランプ装置 | |
| JP5354671B2 (ja) | クランプ装置 | |
| JP5497932B2 (ja) | クランプ装置 | |
| JP2013539416A (ja) | 機械部品用、特に機械加工などが施される部品用のロック装置 | |
| CN114310225A (zh) | 液压阀密封球安装装置 | |
| KR20110004964A (ko) | 원터치 방식의 커플러 | |
| JP2017523365A (ja) | 2つの装置間の流体連通を伴って2つの装置を接続するための接続システム | |
| JP2019533583A (ja) | 連結部材、工作機械付属装置、工作機械および媒体供給方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0105 | International application |
Patent event date: 20181214 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200616 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20200820 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20200616 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |